espressoSynchronous programming for the trusted
component-based engineering of embedded systems and
mission-critical systemsAlgorithmics, Programming, Software and
ArchitectureEmbedded and Real Time
SystemsLoïcBesnardCNRSTechniqueRennesResearch Engineer, CNRSAdnanBouakazUnivFrPhDRennesUniversity of Rennes 1, since october
1st.FrançoisFabreINRIAAutreCategorieRennesJunior Engineer, INRIAYannGloucheINRIAPostDocRennesPost-Doctorate, INRIAThierryGautierINRIAChercheurRennesResearcher, INRIAPaulLe GuernicINRIAChercheurRennesSenior Researcher, INRIAKennethJohnsonINRIAPostDocRennesPost-Doctorate, INRIA, until september
30th.StéphanieLemaileINRIAAssistantRennesSecretary, INRIAVincentMahéINRIAAutreCategorieRennesExpert Engineer, INRIA, until march
30th.JulienOuyINRIAPostDocRennesExpert Engineer, INRIA, until september
30th.JulioPeraltaINRIAPostDocRennesExpert Engineer, INRIA, until june 30th.YueMaINRIAPhDRennesINRIAJean-PierreTalpinINRIAChercheurRennesTeam leader, Senior Researcher, INRIAouiHuafengYuINRIAPostDocRennesExpert Engineer, INRIAOverall ObjectivesIntroduction
The ESPRESSO project-team is interested in the model-based
computer-aided design of embedded-software architectures
using formal methods provided with the polychronous model of
computation
. ESPRESSO focuses on the
system-level modeling and validation of software
architecture, during which formal design and validation
technologies can be most benefitial to users in helping to
explore key design choices and validate preliminary user
requirements. The research carried out in the project team
covers all the necessary aspects of system-level design by
providing a framework called Polychrony. The company Geensoft
(now part of Dassault Systems) has supplied a commercial
implementation of Polychrony, RT-Builder (see
http://
www.
geensoft.
com), which has been deployed on
large-scale applications with the avionics and automotive
industries.
Polychrony is a computer-aided design toolset that
implements the best-suited GALS (globally asynchronous and
locally synchronous) model of computation and communication
to semantically capture embedded architectures. It provides a
representation of this model of computation through an
Eclipse environment to facilitate its use and inter-operation
with the heterogeneity of languages and diagrams commonly
used in the targeted application domains: aerospace and
automotive. The core of Polychrony provides a wide range of
analysis, transformation, verification and synthesis services
to assist the engineer with the necessary tasks leading to
the simulation, test, verification and code-generation for
software architectures, while providing guaranteed assurance
of traceability and formal correctness. Starting december
1st., the Polychrony toolset is available under EPL and GPL
v2.0 license by INRIA.
Context and motivations
The design of embedded software from multiple views and
with heterogeneous formalisms is an ubiquitous practice in
the avionics and automotive domains. It is more than common
to utilize different high-level modeling standards for
specifying the structure, the hardware and the software
components of an embedded system.
Providing a high-level view of the system (a system-level
view) from its composite models is a necessary but difficult
task, allowing to analyze and validate global design choices
as early as possible in the system design flow. Using formal
methods at this stage of design requires one to define the
suited system-level view in a model of computation and
communication which has the mathematical capability to cross
(abstract or refine) the algebraic boundaries of the specific
MoCCs used by each of its constituents : synchronous and
asynchronous models of communication; discrete and continuous
models of time.
We believe these requirements to be met with the
polychronous model of computation. Historically related to
the synchronous programming paradigm (Esterel, Lustre), the
polychronous model of computation implemented with the
data-flow language Signal and its Eclipse environment
Polychrony stands apart by the capability to model
multi-clocked system. This feature has, in turn, been proved
and developed as one ability to compositionally describe
high-level abstractions of GALS architectures.
The research and development performed in the team aim at
completely exploiting this singularity and to implement its
practical implications in order to provide the community with
all benefits gained from this property of
compositionality.
Our main research results are, first and foremost, to
consolidate the unique capability of the polychromous model
of computation to provide a compositional design mathematical
framework with formal analysis and modular code generation
techniques implementing true compositionality (i.e. without a
global synchronization artifact as with most synchronous
modeling environments).
The most effective demonstrations of these features are
found in our recent collaborative projects Spacify, Opees and
Cesar to equip industrial toolset with architecture/functions
co-modeling services and provide flexible and modular code
generation services.
Our research perspectives aim at pursuing the research,
dissemination, collaboration and technology transfer results
obtained by the team over the past years and, in doing so,
further exploit the singularity and benefits of our model of
computation and maximize its impact on the academic and
industrial community.
The polychronous approach
Despite overwhelming advances in embedded systems design,
existing techniques and tools merely provide
ad-hocsolutions to the challenging issue of the
productivity gap. The pressing demand for design tools has
sometimes hidden the need to lay mathematical foundations
below design languages. Many illustrating examples can be
found, e.g. the variety of very different formal semantics
found in state-diagram formalisms. Even though these design
languages benefit from decades of programming practice, they
still give rise to some diverging interpretations of their
semantics.
The need for higher abstraction-levels and the rise of
stronger market constraints now make the need for unambiguous
design models more obvious. This challenge requires models
and methods to translate a high-level system specification
into a distribution of purely sequential programs and to
implement semantics-preserving transformations and high-level
optimizations such as hierarchization (sequentialization) or
desynchronization (protocol synthesis).
In this aim, system design based on the so-called
“synchronous hypothesis” has focused the attention of many
academic and industrial actors. The synchronous paradigm
consists of abstracting the non-functional implementation
details of a system and lets one benefit from a focused
reasoning on the logics behind the instants at which the
system functionalities should be secured.
With this point of view, synchronous design models and
languages provide intuitive models for embedded systems
. This affinity explains the ease
of generating systems and architectures and verify their
functionalities using compilers and related tools that
implement this approach.
In the relational mathematical model behind the design
language Signal, the supportive data-flow notation of
Polychrony, this affinity goes beyond the domain of purely
sequential systems and synchronous circuits and embraces the
context of complex architectures consisting of synchronous
circuits and desynchronization protocols: globally
asynchronous and locally synchronous architectures
(GALS).
This unique feature is obtained thanks to the fundamental
notion of
polychrony: the capability to describe systems in
which components obey to multiple clock rates. It provides a
mathematical foundation to a notion of
refinement: the ability to model a system from the
early stages of its requirement specifications (relations,
properties) to the late stages of its synthesis and
deployment (functions, automata).
The notion of polychrony goes beyond the usual scope of a
programming language, allowing for specifications and
properties to be described. As a result, the Signal design
methodology draws a continuum from synchrony to asynchrony,
from specification to implementation, from abstraction to
refinement, from interface to implementation. Signal gives
the opportunity to seamlessly model embedded systems at
multiple levels of abstraction while reasoning within a
simple and formally defined mathematical model.
The inherent flexibility of the abstract notion of signal
handled in Signal invites and favors the design of
correct-by-construction systems by means of well-defined
model transformations that preserve the intended semantics
and stated properties of the architecture under design.
Highlights
The main headline of 2010 is the delivery of the
Polychrony toolset in open-source under GPL and EPL licenses.
It is the result of a process initiated early this year and
conducted in close collaboration with INRIA's DTI in order to
precisely identify the perimeter of the license and identify
the best-suited licensing terms compatible with its users and
potential contributors.
Our second headline is the publication of a book on the
"Synthesis of embedded software" with Springer, co-edited by
Sandeep Shukla and Jean-Pierre Talpin. The publication of
this book is consecutive to organization of a one-day
tutorial at the Design Automation and Test in Europe (DATE)
2009 Conference on "Correct-by-Construction Embedded Software
Synthesis: Formal Frameworks, Methodologies, and Tools", in
2009.
Scientific FoundationsIntroduction
Embedded systems are not new, but their pervasive
introduction in ordinary-life objects (cars, telephone, home
appliances) brought a new focus onto design methods for such
systems. New development techniques are needed to meet the
challenges of productivity in a competitive environment.
Synchronous languages rely on the
synchronous hypothesis, which lets computations and
behaviors be divided into a discrete sequence of
computation stepswhich are equivalently called
reactionsor
execution instants. In itself this assumption is
rather common in practical embedded system design.
But the synchronous hypothesis adds to this the fact that,
inside each instant, the behavioral propagation is
well-behaved (causal), so that the status of every signal or
variable is established and defined prior to being tested or
used. This criterion, which may be seen at first as an
isolated technical requirement, is in fact the key point of
the approach. It ensures strong semantic soundness by
allowing universally recognized mathematical models to be
used as supporting foundations. In turn, these models give
access to a large corpus of efficient optimization,
compilation, and formal verification techniques. The
synchronous hypothesis also guarantees full equivalence
between various levels of representation, thereby avoiding
altogether the pitfalls of non-synthesizability of other
similar formalisms. In that sense the synchronous hypothesis
is, in our view, a major contribution to the goal of
model-based designof embedded systems.
We shall describe the synchronous hypothesis and its
mathematical background, together with a range of design
techniques enpowered by the approach. Declarative formalisms
implementing the synchronous hypothesis can be cast into a
model of computation
consisting of a
domainof traces or behaviors and of semi-lattice
structure that renders the synchronous hypothesis using a
timing equivalence relation: clock equivalence. Asynchrony
can be superimposed on this model by considering a flow
equivalence relation as well as heterogeneous systems
by parameterizing composition
with arbitrary timing relations.
A synchronous model of computation
We consider a partially-ordered set of tags
tto denote instants seen as symbolic periods in time
during which a reaction takes place. The relation
t1t2says that
t1occurs before
t2. Its minimum is noted 0. A totally ordered set of
tags
Cis called a
chainand denotes the sampling of a possibly
continuous or dense signal over a countable series of
causally related tags. Events, signals, behaviors and
processes are defined as follows:
an
eventeis a pair consisting of a value
vand a tag
t,
a
signalsis a function from a
chainof tags to a set of values,
a
behaviorbis a function from a set of names
xto signals,
a
processpis a set of behaviors that have the same
domain.
In the remainder, we write
tags (
s)for the tags of a signal
s,
vars (
b)for the domain of
b,
b|
Xfor the projection of a behavior
bon a set of names
Xand
b/
Xfor its complementary.
Figure
depicts a behavior
bover three signals named
x,
yand
z. Two frames depict timing domains formalized by
chains of tags. Signals
xand
ybelong to the same timing domain:
xis a down-sampling of
y. Its events are synchronous to odd occurrences of
events along
yand share the same tags, e.g.
t1. Even tags of
y, e.g.
t2, are ordered along its chain, e.g.
t1<
t2, but absent from
x. Signal
zbelongs to a different timing domain. Its tags are
not ordered with respect to the chain of
y.
Composition
Synchronous composition is noted
p| |
qand defined by the union
bcof all behaviors
b(from
p) and
c(from
q) which hold the same values at the same tags
b|
I=
c|
Ifor all signal
xI= vars (
b)
vars
(
c)they share. Figure
depicts the synchronous
composition (Figure
, right) of the behaviors
b(Figure
, left) and the behavior
c(Figure
, middle). The signal
y, shared by
band
c, carries the same tags and the same values in
both
band
c. Hence,
bcdefines the synchronous composition of
band
c.
Scheduling
A scheduling structure is defined to schedule the
occurrence of events along signals during an instant
t. A scheduling
is a pre-order relation between dates
xtwhere
trepresents the time and
xthe location of the event. Figure
depicts such a relation
superimposed to the signals
xand
yof Figure
. The relation
yt1xt1, for instance, requires
yto be calculated before
xat the instant
t1. Naturally, scheduling is contained in time: if
t<
t'then
xtbxt'for any
xand
band if
xtbxt'then
t'¬<
t.
Structure
A synchronous structure is defined by a semi-lattice
structure to denote behaviors that have the same timing
structure. The intuition behind this relation is depicted
in Figure
. It is to consider a signal
as an elastic with ordered marks on it (tags). If the
elastic is stretched, marks remain in the same relative
(partial) order but have more space (time) between each
other. The same holds for a set of elastics: a behavior.
If elastics are equally stretched, the order between
marks is unchanged.
In Figure
, the time scale of
xand
ychanges but the partial timing and scheduling
relations are preserved. Stretching is a partial-order
relation which defines clock equivalence. Formally, a
behavior
cis a
stretchingof
bof same domain, written
bc, iff there exists an increasing bijection on tags
fthat preserves the timing and scheduling
relations. If so,
cis the image of
bby
f. Last, the behaviors
band
care said
clock-equivalent, written
, iff there exists a behavior
ds.t.
dband
dc.
A declarative design language
Signal
is a declarative design
language expressed within the polychronous model of
computation. In Signal, a process
Pis an infinite loop that consists of the synchronous
composition
P| |
Qof simultaneous equations
x=
yfzover signals named
x,
y,
z. The restriction of a signal
name
xto a process
Pis noted
P/
x.
P,
Q:: =
x=
yfz|
P/
x|
P| |
Q
Equations
x=
yfzin Signal more generally denote
processes that define timing relations between input and
output signals. There are four primitive combinators in
Signal:
delay
, initially defines the signal
xby the value
vand then by the previous value of the signal
y. The signal
yand its delayed copy
are synchronous: they share the same set of tags
. Initially, at
t1, the signal
xtakes the declared value
vand then, at tag
tn, the value of
yat tag
tn-1.
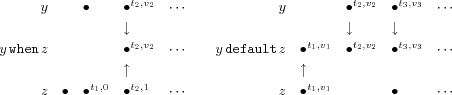
sampling
, defines
xby
ywhen
zis true (and both
yand
zare present);
xis present with the value
v2at
t2only if
yis present with
v2at
t2and if
zis present at
t2with the value true. When this is the case, one
needs to schedule the calculation of
yand
zbefore
x, as depicted by
.
merge
, defines
xby
ywhen
yis present and by
zotherwise. If
yis absent and
zpresent with
v1at
t1then
xholds
(
t1,
v1). If
yis present (at
t2or
t3) then
xholds its value whether
zis present (at
t2) or not (at
t3).
The structuring element of a Signal specification is a
process. A process accepts input signals originating from
possibly different clock domains to produce output signals
when needed. This allows, for instance, to specify a
counter where the inputs
tickand
resetand the output
valuehave independent clocks. The body of
counterconsists of one equation that defines the
output signal
value. Upon the event
reset, it sets the count to 0. Otherwise, upon a
tickevent, it increments the count by referring to
the previous value of
valueand adding 1 to it. Otherwise, if the count
is solicited in the context of the counter process (meaning
that its clock is active), the counter just returns the
previous count without having to obtain a value from the
tickand
resetsignals.
process counter = (? event tick, reset ! integer value)
(| value := (0 when reset)
default ((value$ init 0 + 1) when tick)
default (value$ init 0)
|);
A Signal process is a structuring element akin to a
hierarchical block diagram. A process may structurally
contain sub-processes. A process is a generic structuring
element that can be specialized to the timing context of
its call. For instance, the definition of a synchronized
counter starting from the previous specification consists
of its refinement with synchronization. The input tick and
reset clocks expected by the process
counterare sampled from the boolean input signals
tickand
resetby using the
when tickand
when reset expressions. The count is then
synchronized to the inputs by the equation
reset ^= tick ^= count.
process synccounter = (? boolean tick, reset ! integer value)
(| value := counter (when tick, when reset)
| reset ^= tick ^= value
|);
Compilation of Signal
Sequential code generation starting from a Signal
specification starts with an analysis of its implicit
synchronization and scheduling relations. This analysis
yields the control and data flow graphs that define the
class of sequentially executable specifications and allow
to generate code.
Synchronization and scheduling
specifications
In Signal, the clock
of a signal
xdenotes the set of instants at which the signal
xis present. It is represented by a signal that is
true when
xis present and that is absent otherwise. Clock
expressions represent control. The clock
(resp.
) represents the time tags at which a boolean
signal
xis present and true (resp. false).
The empty clock is written 0 and clock expressions
ecombined using conjunction, disjunction and
symmetric difference. Clock equations
Eare Signal processes: the equation
synchronizes the clocks
eand
e'while
specifies the containment of
ein
e'. Explicit scheduling relations
allow to schedule the calculation of signals (e.g.
xafter
yat the clock
e).
Synchronization and scheduling
analysis
A Signal process
Pcorresponds to a system of clock and scheduling
relations
Ethat denotes its timing structure. It can be
defined by induction on the structure of
Pusing the inference system
P:
Eof Figure
.
x := y$ init v : ^x ^= ^y
x := y when z : ^x ^= ^y when z | y -> x when z
x := y default z : ^x ^= ^y default ^z | y -> x when ^y | z -> x when ^z ^- ^y
Hierarchization
The clock and scheduling relations
Eof a process
Pdefine the control-flow and data-flow graphs that
hold all necessary information to compile a Signal
specification upon satisfaction of the property of
endochrony. A process is said endochronous iff,
given a set of input signals and flow-equivalent input
behaviors, it has the capability to reconstruct a unique
synchronous behavior up to clock-equivalence: the input
and output signals are ordered in clock-equivalent
ways.
To determine the order
in which signals are processed during the period of a
reaction, clock relations
Eplay an essential role. The process of determining this
order is called hierarchization and consists of an insertion
algorithm which hooks elementary control flow graphs (in the
form of if-then-else structures) one to the others.
Figure
, right, let
h3 be a clock computed using h1 and h2. Let h be the head of a
tree from which h1 and h2 are computed (an if-then-else), h3 is
computed after h1 and h2 and placed under h.
Application domains
The application domains covered by the Polychrony toolbox
are engineering areas where a system design-flow requires
high-level model transformations and verifications to be
applied during the development-cycle. The project-team has
focused on developing such integrated design methods in the
context of avionics applications, through the European IST
projects Sacres, Syrf, Safeair, Speeds, and through the
national ANR projects Topcased, OpenEmbeDD, Spacify. In this
context, Polychrony is seen as a platform on which the
architecture of an embedded system can be specified from the
earliest design stages until the late deployment stages
through a number of formally verifiable design
refinements.
Along the way, the project adopted the policy proposed
with project Topcased and continued with OpenEmbeDD to make
its developments available to a large community in
open-source. The Polychrony environment is now integrated in
the Opees platform and distributed under EPL and GPL v2.0
license for the benefits of a growing community of users and
contributors, among which the most active are Virginia Tech's
Fermat laboratory and INRIA's project-teams Aoste, Dart.
The Polychrony toolset is an Open Source development
environment for critical/embedded systems based on Signal, a
real-time polychronous data-flow language. It provides a
unified model-driven environment to perform design
exploration by using top-down and bottom-up design
methodologies formally supported by design model
transformations from specification to implementation and from
synchrony to asynchrony. It can be included in heterogeneous
design systems with various input formalisms and output
languages.
The Polychrony toolset provides a formal framework:
to validate a design at different
levels, by the way of formal verification and/or
simulation
to refine descriptions in a top-down
approach,
to abstract properties needed for
black-box composition,
to assemble heterogeneous predefined
components (bottom-up with COTS),
to generate executable code for
various architectures.
The Polychrony toolset contains three main components and
an experimental interface to GNU Compiler Collection
(GCC):
The Signal toolbox, a batch compiler
for the Signal language, and a structured API that
provides a set of program transformations. The Signal
toolbox can be installed without the other components.
The Signal toolbox is distributed under GPL V2
license.
The Signal GUI, a Graphical User
Interface to the Signal toolbox (editor + interactive
access to compiling functionalities). Signal GUI requires
the Signal toolbox or another component that redefines
the Signal toolbox Syn and Sem APIs. The Signal GUI is
distributed under GPL V2 license.
The SME platform, a front-end to the
Signal toolbox in the Eclipse environment. The SME
platform requires the Signal toolbox or another component
that redefines the Signal toolbox Syn and Sem APIs. The
SME platform is distributed under EPL license.
GCCst, a back-end to GCC that
generates Signal programs (not yet available for
download).
The Polychrony toolset also provides:
libraries of Signal programs,
a set of Signal programs examples,
user oriented and implementation
documentations,
facilities to generate new
versions.
The Polychrony toolset is downloadable on the following
web sites:
The Polychrony toolset public web
site:
http://www.irisa.fr/espresso/Polychrony. This site, intended for users, contains
downloadable executable versions of the software for
differents platforms, user documentations, examples,
etc.
The INRIAGForge:
https://gforge.inria.fr. This site, intended for developers, contains the
whole sources of the environment and their
documentation.
The TOPCASED distribution site:
http://www.topcased.org. This site provides the current reference version
of the SME platform, including the executable of the
Signal toolbox.
The Polychrony toolset currently runs on Linux, MacOS and
Windows systems.
The Geensoft company, now part of Dassault Systèmes,
supplies a commercial implementation of Polychrony, called
RT-Builder, used for industrial scale projects: by Airbus for
the A380 embedded software developments, by Hispano-Suiza
(SAFRAN Group) for aircraft engines applications (see
www.geensoft.com).
The SME platformLoïcBesnardYannGloucheHuafengYuFrançoisFabreYueMa
We have developed a metamodel and interactive editor of
Polychrony in Eclipse. Signal-Meta is the metamodel of the
Signal language. It describes all syntactic elements
specified in
: all Signal operators (e.g.
arithmetic, clock synchronization), model (e.g. process
frame, module), and construction (e.g. iteration, type
declaration). Signal-Meta has been extended to allow the
definition of mode automata to extend the
functionality-oriented data-flow paradigm with the capability
to model transition systems easily and provide an additional
imperative flavor (Sec.
).
These metamodels aim at providing a user with a graphical
framework allowing to model applications using a
component-based approach. Application architectures can be
easily described by just selecting these components via drag
and drop, creating some connections between them and
specifying their parameters as component attributes. Using
the modeling facilities provided with the Topcased framework,
we have created a graphical environment for Polychrony (see
figure
) called SME (Signal-Meta under
Eclipse). To highlight the different parts of the modeling in
Signal, we split the modeling of a Signal process in three
diagrams: one to model the interface of the process, one to
model the computation (or dataflow) part, and one to model
all explicit clock relations and dependences. The SME
environment is available through the Espresso update site
, in the current OpenEmbeDD
distribution
, or in the TopCased distribution
.
MIMAD - Integrated Modular Avionics design using
PolychronyThierryGautierPaulLe GuernicJean-PierreTalpin
The Apex interface, defined in the ARINC standard
, provides an avionics
application software with the set of basic services to access
the operating-system and other system-specific resources. Its
definition relies on the Integrated Modular Avionics approach
(IMA
). A main feature in an IMA
architecture is that several avionics applications (possibly
with different critical levels) can be hosted on a single,
shared computer system. Of course, a critical issue is to
ensure safe allocation of shared computer resources in order
to prevent fault propagations from one hosted application to
another. This is addressed through a functional partitioning
of the applications with respect to available time and memory
resources. The allocation unit that results from this
decomposition is the
partition.
A partition is composed of
processeswhich represent the executive units (an ARINC
partition/process is akin to a Unix process/task). When a
partition is activated, its owned processes run concurrently
to perform the functions associated with the partition. The
process scheduling policy is priority preemptive.
Each partition is allocated to a processor for a fixed
time window within a major time frame maintained by the
operating system. Suitable mechanisms and devices are
provided for communication and synchronization between
processes (e.g.
buffer,
event,
semaphore) and partitions (e.g.
portsand
channels).
The specification of the ARINC 651-653 services in
Signal
is now part of the Polychrony
distribution and offers a complete implementation of the Apex
communication, synchronization, process management and
partitioning services. Its Signal implementation consists of
a library of generic, parameterizable Signal modules.
Gathering advantages of declarative and imperative
approaches, mode automata were originally proposed by
Maraninchi et al. to extend the functionality-oriented
data-flow paradigm with the capability to model transition
systems easily and provide an additional imperative flavor.
Similar variants and extensions of the same approach to mix
multiple programming paradigms or heterogeneous models of
computation
have been proposed until
recently, the latest advance being the combination of stream
functions with automata in
. Nowadays, commercial toolsets
such as the Esterel Studio's Scade or Matlab/Simulink's
Stateflow are largely inspired from similar concepts.
While the introduction of preemption mechanism in the
multi-clocked data-flow formalism Signal was previously
studied by Rutten et al. in
, no attempt has been made to
extend mode automata with the capability to model
multi-clocked systems and multi-rate systems. In
, we extend Signal-Meta with an
inherited metamodel of multi-clocked mode automata. A salient
feature is the simplicity incurred by the separation of
concerns between data-flow (that expresses structure) and
control-flow (that expresses a timing model) that is
characteristic to the design methodology of Signal.
While the specification of mode automata in related works
requires a primary address on the semantics and on
compilation of control, the use of Signal as a foundation
allows to waive this specific issue to its analysis and code
generation engine Polychrony and clearly exposes the
semantics and transformation of mode automata in a much
simpler way by making use of clearly separated concerns
expressed by guarded commands (data-flow relations) and by
clock equations (control-flow relations).
New ResultsPolychrony and Kahn Process NetworksThierryGautierPaulLe GuernicJean-PierreTalpin
We have continued our reconsideration work on fundamental
bases of the polychronous model of computation and its
relation to the well-known model of computation of Kahn
Process Networks. This is leading us to a new model,
currently referred to as WAGaLS, new acronym for `Widely
Asynchronous, Globally limited asynchrony, Locally
Synchronous”. It is based on an algebra of Kahn networks
(characterized by unbounded fifos) of polychronous systems
(with bounded fifos), the local components of which are
atomic endochronous nodes.
Extensions of SignalLoïcBesnardThierryGautierPaulLe Guernic
Starting from a thorough study of the functional aspects
of the AADL (Architecture Analysis and Design Language) and
their modeling in the polychronous model of computation, we
are working on extensions of the Signal language with new
general concepts. This work has different objectives such as
the use of AADL concepts as description language for a
functional version of Signal (AADL specifying the globally
asynchronous architecture), the use of Signal as description
language for thread behaviors in AADL, etc. There are
different ways for these extensions such as, at a first
level, the development of a Signal library for AADL that
contains parameterized Signal processes to represent ports,
queues, synchronization schemes and so on, but also the
addition in the definition of Signal of AADL useful general
concepts and features. The concept of functor could be
introduced in Signal for this purpose. One meaningful
extension we are studying consists in considering different
types of systems and composition operators with respect to
time models. For instance, a time domain, providing real-time
events, may be associated with a synchronous system; an
asynchronous system is built as an asynchronous composition
of synchronous systems, with an assertion over time
domains.
Toward a new clock calculusLoïcBesnardThierryGautierPaulLe Guernic
The writing of an article that provides a detailed
presentation of the program analysis and code generation
techniques currently present in Polychrony
led us to consider an extension
of the hierarchical clock calculus. The current
implementation of the clock calculus is based on a structure
of forest of clocks. However, this structure is not really
convenient when two equivalent clock formulas may be placed
in two distinct trees. Then choices have to be made when some
other formula built on one of these two formulas must be
placed. A new structure, called
banyan system, is defined to represent such
configurations in some non arbitrary way.
Documentation of PolychronyLoïcBesnardThierryGautierPaulLe Guernic
A new technical documentation of the Polychrony toolset
has been designed to accompany its open-source distribution.
This multiscale, multipurpose documentation aims to provide
different views of the software, from a high-level structural
view to low-level descriptions of basic modules. One of the
objectives is to make possible a distribution of the software
“by apartment” corresponding to a given functionality or to a
group of functionalities, for users or developers that would
be interested by only a given part of the whole software.
This provides also a model for contributors that would wish
to add new functionalities or to replace some components of
the software by newly developed ones.
A high-level architectural view of the Polychrony toolset
is given in Figure
.
New features of PolychronyLoïcBesnardFrançoisFabreThierryGautier
To answer a strong requirement of industrials in the
domain of embedded systems, we have introduced traceability
features into the Polychrony toolset. Indeed, in this field,
any transformation of program must be justified and it must
be possible to trace it. On the other hand, such traceability
information can also be exploited in purposes of debugging
applications. The implementation of traceability is based on
the definition of structures of data and algorithms allowing
to follow the transformation of objects since the Eclipse
modeler of the SME Platform until the generated code. These
elements have a direct application with our industrial
partners, as, for example, Geensoft with whom, within the
framework of the ANR project Spacify, we have realized a
simulator of embedded software for satellite applications. We
have also integrated such a simulator mode in the Polychrony
toolset. Moreover, the error messages from the Signal
compiler (Signal Toolbox) are now directly visible on the SME
Graphical User Interface and on the Synoptic model (Synoptic
is a satellite domain-specific modeling language).
Two new features have been also developed for the SME
Platform: interactive compilation and general compilation.
The interactive compilation feature calls directly the needed
functions when the user clicks on the corresponding button.
In the general compilation feature, the user first clicks on
the available options. Then, the Signal Toolbox batch
compiler is called.
To facilitate building the Sigali tool environment,
jointly developed with the Vertecs project-team (
http://
www.
irisa.
fr/
vertecs), on various platforms, we have
integrated the use of the
cmakehttp://
www.
cmake.
orgtool. Cmake is a cross-platform build
generator. Projects specify their build process with
platform-independent files included in each directory of a
source tree. Users build a project by generating a build
system for a native tool on their platform.
A compilation tool-chain for Synoptic, a space
application DSLLoïcBesnardJulienOuyJean-PierreTalpin
In the context of the ANR project Spacify, we are using
Polychrony/SME as compilation infrastructure for the
satellite domain-specific modeling language Synoptic, defined
in the context of the project from industrial user
requirements.
The satellite management software is usually divided in
parts that are quite autonomous one from the other, even if
they share the same platform and resources. Inside each of
these parts, the subparts are most of the time strongly
linked and must cooperate in a synchronous manner. These
parts usually exchange information but with less time
critical constraints, thus relying on asynchronous exchanges.
Such a system is usually called GALS. The flight software
consists of a set of subsystems, called synchronous islets.
These islets can communicate with each other, with other
equipment or with the ground station via the middleware
services. The middleware is built on a real-time kernel that
provides services such as task management and synchronization
primitives. We have defined this year a code generation
toolchain in collaboration with Thales Alenia Space (TAS).
This chain has been applied on a case study specified by TAS.
The goal of this study was to show the feasibility of
automatic code generation from the Synoptic model using the
Polychrony toolset and its implementation using the TAS
framework (Ostrales). Ostrales supplies essentially a service
for task management including mechanisms of synchronization.
An overview of this toolchain is given in Figure
.
The Espresso toolchain is composed of three parts
(described in the Spacify report Spa5bis):
The transformation of the annotated
Synoptic program in a Signal program. It is realized by a
model to model transformation using the Kermeta tool. The
details of this transformation are given in the Spacify
report Spa4b.
The automated code generation with
threads, dynamically scheduled, using the Signal
compiler.
The production of a new Synoptic
program induced by the modification of the interface of
the islets (control signals are added).
The Thales Alenia Space toolchain is described in the
Spacify report Spa11c.
Labelled transition systems for validation of
Signal specificationsLoïcBesnardThierryGautierPaulLe GuernicJulioPeralta
Labelled Transition Systems (LTSs) are a well-known model
for describing and reasoning about concurrent communication
systems (à la CSP). We have proposed a compositional approach
for translating Signal into LTSs by systematically
translating each source Signal kernel operator into an LTS
and then composing the resulting LTSs using the standard
parallel composition operator. In general, this approach
requires a global analysis so that the locking scheme does
not render the resulting LTS deadlocking when an operational
interpretation of the Signal program does not deadlock. For a
subclass of Signal programs, a sufficient global analysis is
that provided by the clock calculus. Our translation may be
exploitable for automatic verification (e.g. model checking),
for distribution verification (e.g. for globally
asynchronous, locally synchronous architectures), for
translation validation, etc. We have proposed in particular a
translation validation approach in which we translate both
the Signal specification and the associated C simulator into
LTSs. Then, an appropriate preorder test between both LTSs
can be interpreted as a refinement between the source Signal
specification and its C implementation
.
An algebraic theory of data-flow
processingKennethJohnsonPaulLe GuernicJean-PierreTalpin
The objective of this work is to define a uniform
theoretical framework in the context of the algebraic theory
of data for studying polychronous equational systems and
their transformations from abstract specifications to
real-time implementations on specific architecture. The
Signal language is used as a concrete support for these
studies.
In the algebraic theory of data, data types are modeled by
an algebra consisting of an interface and an implementation.
The interface is given by a signature consisting of symbols
naming both data and operations on the data. The meaning, or
implementation of the signature is given by a many sorted
algebra consisting of carrier sets and functions on the sets
implementing the data and operations named in the
signature.
Our research will study the Signal framework as a data
type of streams. A stream is a collection of data distributed
through time. Let the data come from a set
Vand time be points (or tags) in a set
T. We model streams by partial functions assigning the
data in
Vto points in
T. Functions on streams are derived from functions on
both data and time. Various sets
Tof tags are being defined depending upon the step in
the design process. Morphisms on these sets will be used to
define transformations (such as refinement, code
distribution,...).
One major investigation is of the expressive power of the
Signal framework. We aim to give an analysis of the type of
system behavior that may be expressed in terms of Signal
equations. The choice of the Signal data and operations
determine the expressiveness of the equations. Our research
emphasizes the process of choosing new data and new Signal
operations. Our choices need not be limited to the discrete
domain. We consider cases where data and tags are continuous
sets such as the real numbers. Thus, we consider Signal
processes operating in continuous time over continuous
data.
Virtual prototyping of imperative
programsLoïcBesnardThierryGautierKennethJohnsonJean-PierreTalpin
Many software systems involve multi-threaded programs
featuring thread communication and shared resources. The
correct and efficient use of shared resources between threads
relies on synchronization methods, such as specialized
commands or events communicated between threads. We have
proposed a new approach that demonstrates a semi-automated
method of translating cooperatively threaded software to the
language Signal in order to verify the correctness of thread
synchronizations in the source code. We consider FairThreads
threads attached to a scheduler that uses deterministic and
cooperative scheduling policy. Our method is based on
automatic translation of C programs into Signal via an
intermediate Static Single Assignment (SSA) representation,
translation which is extended to take into account
cooperative threads
,
.
A simulation infrastructure for CCSL, the timing
model of UML MARTEHuafengYuLoïcBesnardThierryGautierJean-PierreTalpin
Clock Constraint Specification Language (CCSL)
is defined in an annex of the UML
MARTE profile
. We are interested in the
analysis, verification, and synthesis of timed systems
specified in CCSL. These systems subject to clock constraints
can be modeled, specified, analyzed, and simulated within two
software environments: TimeSquare
and Polychrony. Clock constraints
are solved using a heuristic algorithm in TimeSquare, which
is generally non-deterministic. Simulation is carried out and
demonstrated in the form of waves. In comparison, Polychrony
enables deterministic specifications and formal analysis for
the design of safety-critical systems. It is a promising
approach to integrate the complementary technologies present
in the two software environments for the purpose of
system-level design.
In order to benefit from the advantages provided by
Polychrony, the clock constraints specified in CCSL are
translated into Signal, therefore, they are analyzed by tools
and technologies associated with Polychrony. This translation
is carried out in the following steps. The first step is
involved in the CCSL clock hierarchy analysis with the help
of the Polychrony hierarchization technique
. This analysis helps to identify
the determinism with regard to system temporal behavior, and
thus aids code generation for simulation. In comparison,
TimeSquare only provides non-deterministic simulations. The
second step is the translation of CCSL into Signal. Most
primitive CCSL clock relations can be translated into Signal
either directly or via the integration of additional clocks
in the translation. Currently, only certain CCSL clock
relations involved in unbounded FIFO are not addressed. This
translation enables to bridge between TimeSquare and
Polychrony. Controller synthesis is carried out in the last
step. Properties are taken from clock constraints, such as
precedence or synchronization, and are ensured by the
synthesized controllers. We use the Sigali tool for the
controller synthesis.
It is also interesting to translate clock relations
specified in Signal into CCSL for the simulation purpose as
TimeSquare provides a graphical interface for simulation
demonstration and non-deterministic specifications can be
handled. However only Boolean equations are considered in
Signal due to CCSL expressivity. The first advantage of this
approach is that non-deterministic simulation driven by the
constraints solver in TimeSquare can be carried out even if
the original Signal program is rejected by the Signal
compiler due to the non-determinism issue. The second
advantage is that graphical demonstrations of simulation
results in the format of waveform are enabled for
Polychrony.
Transformation of Simulink models in
PolychronyYannGloucheThierryGautierJean-PierreTalpin
Dataflow models and state machines are common models of
computation adopted in the system design of avionics,
automotive applications, etc. One of the most popular tools
that accept these models is Simulink/Stateflow in the Matlab
family. One of the models of computation adopted by Simulink
is extended dataflow, and Stateflow relies on the model of
state machines. A typical Simulink model is defined by a set
of interconnected blocks, which model entities in a system,
such as sensors, actuators, and logical operations. The
library of Simulink includes function blocks that can be
linked and edited in order to model the dynamics of the
system. Gene-Auto is a framework for code generation from a
safe subset of Simulink and Stateflow models for safety
critical embedded systems. This safe subset is also adopted
in our work. From now on, Simulink is used for short to
indicate the subset of Simulink and/or Stateflow languages
that is adopted by Gene-Auto. The scope of the Gene-Auto
project is initiated for the generation of C-code from safe
subsets of Simulink, and Stateflow modeling languages.
Considering a Simulink model, we used Gene-Auto
transformation for having (by transformations) a model
conform to the Gene-Auto Ecore meta-model.
The Gene-Auto model considers only the discrete time
approach of Simulink. A Gene-Auto model is defined by a set
of blocks representing each entity (inputs, outputs, logical
operators,...) of a system. Each block is associated to a
specific activation clock. At each tick of this clock, a
block carries out a computation on its available inputs and
produces new outputs. A global activation clock is used to
synchronize the activation clocks of Simulink blocks. From
this point of view, our Simulink model is synchronous, and
each of its blocks is thus modeled as a synchronous Signal
process.
The model transformation chain from functional models in
Simulink to Signal is divided into several steps. The first
step involves the transformation of Simulink models to Ecore
based Gene-Auto models. These models are then translated into
Signal via the SME metamodel through a transformation
implemented in Kermeta. The whole transformation chain from
high level Simulink/Gene-Auto models to executable code is
illustrated by Figure
.
Co-modeling and simulation of GALS
architecturesYueMaHuafengYuYannGloucheLoïcBesnardThierryGautierPaulLe GuernicJean-PierreTalpin
In the framework of TopCased project, we are using
Polychrony as a formal model for the co-modeling and
validation of GALS architecture. It aims at interpreting the
GALS architecture specified in AADL to a polychronous model
of computation, and then automatically generate its GALS
implementation, in order to obtain an executable model,
allowing early simulation, testing and verification. Such
simulation of GALS systems within the polychronous model has
obvious advantages: it allows an easy and precise description
of the whole range of applications, from the pure synchronous
or asynchronous model to GALS architecture, and an
early-phase validation and step-wise refinement of the
system.
The main motivation of the work is to bridge the gaps
between the semantics of AADL and Polychrony: a proposition
of a methodology for system-level modeling and validation of
embedded systems specified in AADL via the polychronous model
of computation. We implemented a plug-in for TopCased
framework to perform model transformation from AADL to SME.
This transformation is done using the model transformation
language ATL. The main developments this year have focused
on:
Temporal interpretation of AADL model.
Due to the different timing semantics between AADL and
Signal, we keep the ideal view of instantaneous
computations and communications of polychronous model,
moving computing latencies and communication delays to
specific memory process, that introduce delays and well
suited synchronizations. The temporal properties of
thread execution and communications are modeled in
Signal.
Software updates. The model
transformation updates from ATL version 2.0.2 based on
Eclipse 3.4.1, to the latest ATL version 3.1.1 based on
TopCased 3.4.1 (Eclipse 3.5.2). The new version is
integrated as a plug-in in the TopCased platform.
The Cesar demonstrator and reference technology
platformYueMaHuafengYuYannGloucheLoïcBesnardThierryGautierPaulLe GuernicJean-PierreTalpin
The design of embedded systems from multiple views and
heterogeneous models is ubiquitous in avionics as, in
particular, different high-level modeling standards are
adopted for specifying the structure, hardware and software
components of a system. The system-level simulation of such
composite models is necessary but difficult task, allowing to
validate global design choices as early as possible in the
system design flow. Inspired by the Ptolemy
, MoBIES
, SML-Sys
, etc., we propose an approach to
the issue of composing, integrating and simulating
heterogeneous models in a system co-design flow (
, Figure
). First, the functional behavior
of an application is modeled with synchronous data-flow and
Statechart diagrams using Simulink/Gene-Auto
. The system architecture is
modeled in the AADL standard
. These high-level, synchronous
and asynchronous, models are then translated into a common
model, based on a polychronous model of computation, allowing
for a Globally Asynchronous Locally Synchronous (GALS)
interpretation of the composed models. This translation is
implemented as an automatic model transformation within
Polychrony. Simulation, including profiling, value change
dump demonstration
, Syndex adequation
, etc., is carried out based on
the common model within Polychrony.
Polychrony has been integrated to the Reference Technology
Platform (RTP) of Cesar to serve as a framework for
co-modeling and architecture exploration. To demonstrate
these capabilities, we participated to the pilot application
of sub-project 3 (SP3), whose aim is to use the RTP to define
a complete software design flow for the doors management
system (DMS) of an Airbus A350. We participated to the
project's demonstration of the RTP at the annual Artemisia
Consortium meeting.
In the pilot application of the DMS, functional components
are modeled in the synchronous model of computation of
Simulink, whereas the architecture is modeled in the
asynchronous model of computation of AADL. These high-level
models are transformed into Signal programs via SME models.
Additional models, which are used in the simulation of a
closed system, are coded manually in Signal and synchronously
composed with the Signal programs transformed from Simulink
and AADL models (Figure
). Finally, C or Java code is
generated from Signal programs. Simulation can then be
carried out for the purpose of performance evaluation and VCD
(Value Change Dump) based demonstration.
ModelBus
is used for the integration of
Polychrony into the Cesar Reference Technology Platform
(RTP). ModelBus, an integration platform based on
Service-Oriented Architecture (SOA), connects different
services offered by tools connected to ModelBus. In addition,
ModelBus repositories are used to store models, which are
made available for all tools attached to ModelBus. Our whole
model transformation and simulation chain has been
implemented with Galileo Eclipse and attached to ModelBus as
a provider of registered remote service. The data consumed by
this service is Simulink and AADL models, and the produced
data is a VCD file. All these data are exchanged via ModelBus
repositories. This demonstration also shows the integration
of Polychrony with other tools, such as OSATE (AADL),
Simulink, Gene-Auto, TimeSquare, ATL, Kermeta, etc.
From polychronous to Safety-critical
JavaAdnanBouakazJean-PierreTalpinJanVitek
Existing real-time and mission-critical programming
languages suffer from a low level of abstraction and
non-determinism in both the timing and functional domains.
Virtualisation is an attractive solution to get around
re-certification of systems when changes occur in the
hardware environment, which are very probable since such
systems are designed to operate for a long period.
One of the most famous high-level language virtual machine
architecture is the JVM (Java Virtual Machine). Java is used
in many disciplines such the conception and prototyping of
embedded systems. Unfortunately, commercial JVMs are designed
to maximize the performance of applications at the expense of
predictability. Therfore, they cannot be used to implement
safety-critical systems. However, if we place some
restrictions and modifications, one can surpass the problem.
This is the objective of RTSJ (real-time specification for
Java), SCJ (safety-critical Java) and many programming models
such as Flexotask. Flexotask is a graphic environment under
Eclipse, which allows generating automatically
safety-critical programs (for an appropriate JVM) from a
data-flow specification. This framework is developed at the
Purdue University, Indiana, USA.
Started recently with the co-direction of Prof. Jan Vitek
(one of the designers of Flexotask), the thesis “A
polychronous model of computation for SCJ” aims to provide
SCJ or Flexotask with the mathematical tools of polychrony
and so the capability of verifying key properties such as
determinism.
Contracts and Grants with IndustryRNTL project SpacifyLoïcBesnardJulienOuyJean-PierreTalpin
In the context of the ANR project Spacify, whose aim is to
design a domain-specific programming environment for software
onboard spacecraft called Synoptic, the Espresso team
provides Polychrony as a code generation infrastructure for
Synoptic and has achieved two major results assessing the
impact of this technology transfer.
The project is led by the French Agencies CNES and ONERA.
It gathers prime contractors Astrium Satellites and Thales
Alenia Space, Geensoft (formerly TNI Software) and Anyware
Technologies, and academic teams Cama from Telecom Bretagne,
Espresso from INRIA, MV from Labri and Acadie from Irit. It
is a 3-years project (starting in February 2006) partly
funded by the French Research Agency (ref. ANR 06 TLOG
27).
The project shall promote a top-down method based upon
multi-clock synchronous modeling, formally-verified
transformations, exhaustive verification through
model-checking and a runtime framework featuring
realtime-friendly distribution and dynamic-reconfiguration
services. Furthermore, the various tools shall be released
under FLOSS (free/libre/open-source software) licenses,
favoring cost-sharing and sustainability.
First, a long-lasting point-to-point case study conducted
with one of the industrial end-user of the project, Thalès
Alenia Space, has been concluded by validating the usability
of modular and concurrent code generation services of
Polychrony to implement, together with TAS in-house real-time
operating system, the main control-software functionalities
(AOCS) of a generic satellite model.
Second, and through a close collaboration with another
industrial partner of the project, Geensoft, who distributes
a commercial environment based on Signal and its polychronous
model of computation: RT-Builder; we successfully
demonstrated the traceability functionalities present in the
Polychrony environment by allowing the joint utilization of
the concurrent code generated by Polychrony from Synoptic
diagrams with the RT-Builder as a simulation toolset.
The Espresso project-team participates to the ANR project
FotoVP, leaded by Verimag. The aim of the FotoVP is to
develop virtual prototyping tools and techniques for the
simulation and verification of system-level C/SystemC
specifications in synchronous models of computation. Our
results related to this project are presented in
section
Our collaborations with the partners of projects Topcased
and Spacify is continued in the Artemisia project Cesar who,
from the results obtained so far, have contributed to
integrating the Polychrony toolset in the Reference
Technology Platform (RTP, v1.0) of the project. The
Polychrony toolset has also been selected to serve as
academic demonstrator of Cesar sub-project SP3. A first
demonstration has been presented at the plenary meeting of
the Artemisia consortium early June.
Cesar means Cost-Efficient methods and processes for
SAfety Relevant embedded systems. The project aims at a
stronger integration of safety engineering methods and
techniques, all along the phases of the development process.
The purpose is to optimize globally the safety critical
embedded system architecture by taking in account
simultaneously all viewpoints and associated criteria (cost,
mass, safety).
Part of the demonstration performed in the frame of
project Cesar displays results on a case study performed in
the context of project ITEA2 project Opees, in collaboration
with Airbus. This case study consists of co-modeling the
doors management system of an Airbus A350 by merging its
architecture description, specified with AADL, with its
behavioral description, specified with Simulink. In this
case-study, we demonstrate that the Polychrony toolset can
effectively serve as a modeling infrastructure to
compositionally assemble, compile and verify heterogeneous
specifications (AADL and Simulink). Our case study will cover
code generation for real-time simulation and test as well as
formal verification both at system-level and in a GALS
framework. Based on that case study, we aim at developing
further modular code-generation services, real-time
simulation, test and performance evaluation, formal
verification as well as the validation of the generated
concurrent and distributed code.
The ITEA2 project Opees is defined as a continuation of
the ANR project Openembedd to provide an open-source platform
for embedded software design. The mission of Opees is to
build a community able to ensure long-term availability of
innovative engineering technologies in the domain of
dependable / critical software-intensive embedded systems.
Its main objectives are to secure the industrial strategy,
improve their competitiveness and develop the European
software industry. The contribution of team Espresso in Opees
consists of the following:
Provide the Polychrony toolset as an
infrastructure for the co-simulation and co-verification
of embedded architectures designed with Geneauto, for its
functional aspects, and AADL, for its non-functional
aspects. The infrastructure will be evaluated through
industry-scale case studies in collaboration with CS and
Airbus.
Provide the Polychrony distributed
code generation and formal verification functionalities
in order to provide means for model-checking
automatically generated distributed C code with respect
to intermediate representations of Geneauto/AADL
specifications in Polychrony.
Other Grants and ActivitiesNational ActionsARC Triade – Combining models of computation for
the design of real-time and embedded
applicationsJean-PierreTalpinThierryGautierYannGlouchePaulLe Guernic
The Triade Cooperative Research Action (ARC) is a
partnership between the Aoste, Dart, and Espresso teams of
INRIA. Triade aims at using formal models with structuring
programmatic constructs as means to translate programs and
descriptions written in formalisms widely used in Embedded
System and SoC design, and provide a seamless flow of
increasingly time-defined and time-accurate models, so as
to progressively obtain the final mapped implementation
through provably correct steps from the early description
elements.
European ActionsThierryGautierPaulLe GuernicJean-PierreTalpinEricVecchieNetwork of excellence ARTIST2
The Espresso project-team participates to the Artist2
network of excellence. Detailed presentations on the aim
and scope of the network can be found in the book
and the website
http://
www.
artist-embedded.
org/
FP6of the project. In particular, we
have contributed to a survey of real-time programming
languages edited by Alan Burns
.
International collaborationsLoïcBesnardAdnanBouakazThierryGautierPaulLe GuernicJean-PierreTalpinJulienOuyVirginia Tech
In the frame of three consecutive joint NSF-INRIA and
INRIA associated project programs, together with additional
funds from INRIA scientific direction, INRIA-Rennes, the
University of Rennes, the ARTIST NoE, we have established a
long-lasting and scientifically fruitful collaboration with
the Fermat Laboratory at Virginia Tech (Pr. Sandeep Shukla)
and UC San Diego (Pr. Rajesh Gupta).
The collaboration started in 2002 and was prolonged
until 2009 with the one-year sabbatical of Sandeep Shukla
as invited professor. This collaboration resulted in the
joint publication of 10 scientific volumes as well as 14
journal and conference articles. In the frame of this
collaboration, we jointly created the ACM-IEEE MEMOCODE (
http://
memocode.
irisa.
fr/
2003/
) international symposium series as
well as the FMGALS international workshop series. Finally,
we jointly organized four tutorials.
The collaboration resulted in a technology transfer of
the Polychrony toolset with the launch of the project
CodeSyn at Virginia Tech, funded (and renewed) by the USAF
Laboratories. CodeSyn is an actor-based system level design
formalism whose aim is to implement the polychronous model
of computation to design, verify and synthesize concurrent
real-time embedded avionics on multi-core architectures. We
aim at renewing our past associated project with Fermat in
order to support and help this transfer of our research and
development results. In the meantime, a former PhD of team
Espresso, Julien Ouy, has joined the Fermat laboratory to
developp a code generation infrastructure for CodeSyn using
the Polychrony toolset.
Purdue University
Since 2009, we started a collaboration with Pr. Jan
Vitek, Purdue University. Jan Vitek is a programming
language expert participating in the standardization of
real-time and safety critical extensions and API for the
programming language Java (RTJ and SCJ). The aim of our
collaboration is to promote the polychronous model of
computation as an abstract, concurrent, semantics framework
in which we could capture a high-level (system-level)
abstraction of communication and concurrency in SCJ that
would be suitable to ease its use by the programmer, to
ease formal analysis and verification (to guarantee
asynchronous determinism of concurrent Java programs) and
lead to automated compilation techniques. In the frame of
this collaboration, Jean-Pierre Talpin was invited speaker
at JTRES'09 and invited lecturer at the TIC'10 summer
school. To support this collaboration, Jan Vitek is invited
professor at INRIA-Rennes/IRISA in summer 2010 and the
NSF-PIRE proposal NEXUS as been jointly submitted (together
with several US and European partners). Our collaboration
is strengthened with the arrival of a jointly supervised
PhD student, Adnan Bouakaz.
Beihang University
Since 2009, we started an informal collaboration which
consisted in two consecutive invitations at Beihang
University (Beijing University for Aviation and Aerospace,
BUAA). Pr. Ma and Pr. Hu submitted the nomination
Jean-Pierre Talpin as invited professor at Beihang. We also
submitted a joint collaboration to CNRS jointly with BUAA,
project-team ESPRESSO and IRIT (one of our closest partners
in the Topcased, Spacify, Cesar and Opees projects). This
collaboration aims at exploring the best-suited formal
modeling framework, from models of computation to tool-set,
to assist the engineering of China's next generation
airplanes onboard avionics with formal verification,
simulation and test tools, as well as compilers to
automatically generate DO178-qualifiable code from
system-level (architectural and behavioral)
specifications.
DisseminationWorkshops
Loïc Besnard and Jean-Pierre Talpin have participated to
the meeting INRIA Industries in Toulouse (May 2010) –
http://www.inria.fr/innovation/aeronautique-defense-spatial-securite/showroom-des-demos/l-exploration-d-architecture.
Invited Lectures
Jean-Pierre Talpin was invited speaker at the 3rd
International School on Trends in Concurrency (TIC'10,
http://
web.
me.
com/
vitekj/
TIC10) on "Models, methods and tools for
virtual prototyping embedded architectures"; and at the
inaugural seminar of the ONERA/THALES working group TORRENTS
on Time ORiented Reliable Embedded NeTworked Systems (
http://
www.
irit.
fr/
torrents).
Research visitors
Jan Vitek (Purdue University) visited team in summer 2010
with the support of the University of Rennes 1.
Conferences
Jean-Pierre Talpin is a member of the steering committee
of the ACM-IEEE conference on methods and models for codesign
(MEMOCODE) and of the editorial board of the EURASIP Journal
on Embedded Systems. This year, he served as technical
program committee member for the following conferences
Thierry Gautier served as technical program commitee
member for the conference MEMOCODE 2010 –
http://www-memocode2010.imag.fr/.
Teaching
Thierry Gautier and Loïc Besnard
taught on real-time programming at the DIIC2 Graduate
program of the University of Rennes 1 (ESIR school).
Thierry Gautier taught on formal
methods for component and system synthesis at the Master
2 Graduate program of the University of Rennes 1.
From synchrony to asynchronyAlbertBenvenisteA.B.CaillaudB.PaulLe GuernicP.J. C. M.BaetenJ. C. M.S.MauwS.CONCUR'99, Concurrency Theory, 10th
International ConferenceLecture Notes in Computer Science1664SpringerAugust1999162–177The Synchronous Languages Twelve Years
LaterAlbertBenvenisteA.PaulCaspiP.S.EdwardsS.N.HalbwachsN.PaulLe GuernicP.RobertDe SimoneR.Proceedings of the IEEE Special issue on
Modeling and Design of Embedded Systems91(1)2003Synchronous programming with events and
relations: the Signal language and its semanticsAlbertBenvenisteA.PaulLe GuernicP.C.JacquemotC.Science of Computer Programming161991103-149Embedded Systems Design. The ARTIST
Roadmap for Research and DevelopmentBrunoBouyssounouseB.JosephSifakisJ.Springer, Lecture Notes in Computer Science,
Vol. 34362005Thierry Gautier, contributorDesigning Embedded Systems with the SIGNAL
Programming LanguageAbdoulayeGamatiéA.Springer2009http://
www.
springer.
com/
engineering/
circuits+%26+systems/
book/
978-1-4419-0940-4Polychronous Design of Embedded Real-Time
ApplicationsAbdoulayeGamatiéA.ThierryGautierT.PaulLe GuernicP.Jean-PierreTalpinJ.-P.ACM Transactions on Software Engineering
and Methodology (TOSEM)2007Code generation in the SACRES
projectThierryGautierT.PaulLe GuernicP.F.RedmillF.T.AndersonT.Towards System Safety, Proceedings of the
Safety-critical Systems Symposium, SSS'99Huntingdon, UKSpringerFebruary1999127–149Synthesis of Discrete-Event Controllers
based on the Signal EnvironmentH.MarchandH.P.BournaiP.M.Le BorgneM.PaulLe GuernicP.Discrete Event Dynamic System: Theory and
Applications104October2000347–368Compositional design of isochronous
systemsJean-PierreTalpinJ.-P.JulienOuyJ.ThierryGautierT.LoïcBesnardL.PaulLe GuernicP.Science of Computer Programming2010Implementation of the Data-flow
Synchronous Language SignalT. P.AmagbegnonT. P.LoïcBesnardL.PaulLe GuernicP.Proceedings of the ACM Symposium on
Programming Languages Design and Implementation
(PLDI'95)ACM1995163–173Data-Flow to von Neumann: the Signal
approachPaulLe GuernicP.ThierryGautierT.J. L.GaudiotJ. L.L.BicL.Advanced Topics in Data-Flow
Computing1991413–438Programming Real-Time Applications with
SignalPaulLe GuernicP.ThierryGautierT.M.Le BorgneM.C.Le MaireC.Proceedings of the IEEE799Septembre19911321–1336Polychrony for system designPaulLe GuernicP.Jean-PierreTalpinJ.-P.J.-C.Le LannJ.-C.Journal of Circuits, Systems and
Computers, Special Issue on Application Specific Hardware
Design2003Synthesis of Embedded SoftwareSandeep K.ShuklaSandeep K.Jean-PierreTalpinJ.-P.Springer2010The Signal Synchronous Multiclock Approach
to the Design of Distributed Embedded SystemsAbdoulayeGamatiéA.ThierryGautierT.IEEE Transactions on Parallel and
Distributed Systems2152010641-657http://
hal.
inria.
fr/
inria-00522794Targeting Reconfigurable FPGA based SoCs
using the MARTE UML profile: from high abstraction levels
to code generationImran RafiqQuadriI. R.AbdoulayeGamatiéA.SamyMeftaliS.Jean-LucDekeyserJ.-L.HuafengYuH.ÉricRuttenÉ.International Journal of Embedded
SystemsSep201018 phttp://
hal.
inria.
fr/
inria-00525015Targeting Reconfigurable FPGA based SoCs
using the MARTE UML profile: from high abstraction levels
to code generationImran RafiqQuadriImran Rafiq.HuafengYuH.AbdoulayeGamatiéA.SamyMeftaliS.Jean-LucDekeyserJ.-L.ÉricRuttenÉ.International Journal of Embedded
Systems2010http://
hal.
inria.
fr/
inria-00525015Compositional design of isochronous
systemsJean-PierreTalpinJ.-P.JulienOuyJ.ThierryGautierT.LoïcBesnardL.PaulLe GuernicP.0167-6423Science of Computer Programming2010Adaptivity in High-Performance Embedded
Systems: a Reactive Control Model for Reliable and Flexible
DesignHuafengYuH.AbdoulayeGamatiéA.ÉricRuttenÉ.Jean-LucDekeyserJ.-L.0269-8889Knowledge Engineering Review2010http://
hal.
inria.
fr/
inria-00536883Accepted for publicationCompilation of Polychronous Data Flow
EquationsLoïcBesnardL.ThierryGautierT.PaulLe GuernicP.Jean-PierreTalpinJ.-P.Sandeep K.ShuklaSandeep K.Jean-PierreTalpinJ.-P.Synthesis of Embedded SoftwareSpringer20101–40Synoptic : a domain-specific modeling
language for space on-board application softwareAlexandreCortierA.LoïcBesnardL.J.-P.BodeveixJ.-P.J.BuissonJ.F.DagnatF.M.FilaliM.G.GarciaG.JulienOuyJ.MarcPantelM.A.RuginaA.M.StreckerM.Jean-PierreTalpinJ.-P.Sandeep K.ShuklaSandeep K.Jean-PierreTalpinJ.-P.Synthesis of Embedded SoftwareSpringer2010147–171A Module Language for Typing Signal Programs by ContractsYannGloucheY.ThierryGautierT.PaulLe GuernicP.Jean-PierreTalpinJ.-P.Sandeep K.ShuklaSandeep K.Jean-PierreTalpinJ.-P.Synthesis of Embedded SoftwareSpringer2010147–171A Synchronous Approach to Threaded Program
VerificationKennethJohnsonK.LoïcBesnardL.ThierryGautierT.Jean-PierreTalpinJ.-P.Proceedings of the 2010 10th International
Workshop on Automated Verification of Critical
SystemsAVOCS '102010168–183International Workshop on Automated Verification of Critical Systems10
AVoCS
Interpretation of AADL Behavior Annex into
Synchronous Formalism using SSAYueMaY.Jean-PierreTalpinJ.-P.ThierryGautierT.Proceedings of the 2010 10th IEEE
International Conference on Computer and Information
TechnologyIEEE Computer Society20102361–2366IEEE International Conference on Computer and Information Technology10
CIT
LTSs for translation validation of
(multi-clocked) Signal specificationsJulio C.PeraltaJulio C.ThierryGautierT.LoïcBesnardL.PaulLe GuernicP.Proceedings of the 2010 8th IEEE/ACM
International Conference on Formal Methods and Models for
Codesign (MEMOCODE)IEEE Computer Society2010199–208ACM-IEEE International Conference on Formal Methods and Models for Codesign8
MEMOCODE
Modular Interpretation of Heterogeneous
Modeling Diagrams into Synchronous Equations Using Static
Single AssignmentJean-PierreTalpinJ.-P.JulienOuyJ.ThierryGautierT.LoïcBesnardL.AlexandreCortierA.Proceedings of the 2010 10th International
Conference on Application of Concurrency to System
DesignACSD '10IEEE Computer Society2010137–146International Conference on Application of Concurrency to System Design10
ACSD
A higher-order extension for imperative
synchronous languagesE.VecchieE.Jean-PierreTalpinJ.-P.S.BoisgéraultS.Software and Compilers for Embedded
SystemsSCOPES'10ACM Press2010168–183International Workshop on Software and Compilers for Embedded Systems13
SCOPES
System-level Co-simulation of Integrated
Avionics Using PolychronyHuafengYuH.YueMaY.YannGloucheY.Jean-PierreTalpinJ.-P.LoïcBesnardL.ThierryGautierT.PaulLe GuernicP.AndresToomA.O.LaurentO.Proceedings of the 26th ACM Symposium On
Applied Computing (SAC'11)2011http://
hal.
inria.
fr/
inria-00536907ACM Symposium on Applied Computing26
SAC
Polychronous Analysis of Timing
Constraints in UML MARTEHuafengYuH.Jean-PierreTalpinJ.-P.LoïcBesnardL.ThierryGautierT.FrédéricMalletF.CharlesAndréC.RobertDe SimoneR.IEEE International Workshop on Model-Based
Engineering for Real-Time Embedded Systems DesignEspagne Parador of Carmona20107 p.http://
hal.
inria.
fr/
inria-00497249IEEE International Workshop on Model-Based Engineering for Real-Time Embedded Systems Design2010A Synchronous Approach to Threaded Program
VerificationKennethJohnsonK.LoïcBesnardL.ThierryGautierT.Jean-PierreTalpinJ.-P.INRIAJun2010http://
hal.
inria.
fr/
inria-00492694RR-7320Technical reportHierarchical modeling and analysis of
embedded systemsR.AlurR.T.DangT.J.EspositoJ.Y.HurY.F.IvancicF.V.KumarV.I.LeeI.P.MishraP.G. J.PappasG. J.O.SokolskyO.Proc. IEEE911200311-28Modeling Time(s)CharlesAndréC.FrédéricMalletF.RobertDe SimoneR.ACM/IEEE Int. Conf. on Model Driven
Engineering Languages and Systems (MoDELS/UML'07)TN, USALNCS 4735SpringerOctober2007559–573Heterogeneous Reactive Systems Modeling
and Correct-by-Construction DeploymentAlbertBenvenisteA.PaulCaspiP.LucaCarloniL.AlbertoSangiovanni-VincentelliA.Embedded Software Conference
(EMSOFT'03)Springer Verlag2003SIGNAL V4-INRIA version: Reference
ManualLoïcBesnardL.ThierryGautierT.PaulLe GuernicP.2009http://
www.
irisa.
fr/
espresso/
PolychronyPtolemy: A Framework for Simulating and
Prototyping Heterogenous SystemsJosephBuckJ.SoonhoiHaS.Edward A.LeeE. A.David G.MesserschmittD. G.Int. Journal in Computer
Simulation421994155-182A conservative extension of synchronous
data-flow with state machinesJ.-L.ColacoJ.-L.B.PaganoB.M.PouzetM.In Embedded Software ConferenceACM Press2005Taming heterogeneity: The Ptolemy
approachJ.EkerJ.J. W.JanneckJ. W.Edward A.LeeEdward A.J.LiuJ.J.LudwigJ.S.NeuendorfferS.S.SachsS.Y.XiongY.Proc. IEEE9112003127-144Polychronous Design of Real-Time
Applications with SIGNALThierryGautierT.PaulLe GuernicP.Jean-PierreTalpinJ.-P.AlanBurnsA.ARTIST Survey of Programming
Languages2008http://
www.
artist-embedded.
org/
artist/
ARTIST-Survey-of-Programming.
htmlIEEE Standard for Verilog Hardware
Description Language (VHDL)2006IEEE Std 1364 -2005SML-Sys: a functional framework with
multiple models of computation for modeling heterogeneous
systemDeepak A.MathaikuttyD. A.Hiren D.PatelH. D.Sandeep K.ShuklaS. K.AxelJantschA.Design Automation for Embedded
Systems1220081-30ModelBushttp://
www.
modelbus.
orgOpenEmbeDD website2009http://
openembedd.
orgPolychrony Update Site for Eclipse
plug-ins2009http://
www.
irisa.
fr/
espresso/
Polychrony/
update/
Signal GTI: implementing task preemption
and time intervals in the synchronous data flow language
SignalÉricRuttenÉ.F.MartinezF.Proceedings of the 7th Euromicro Workshop
on Real-Time Systems, Odense, DenmarkIEEE Publ.june1995The MathWorks: Simulinkhttp://
www.
mathworks.
com/
products/
simulink/
Syndexhttp://
www-rocq.
inria.
fr/
syndex/
Polychronous mode automataJean-PierreTalpinJ.-P.ChristianBrunetteC.ThierryGautierT.AbdoulayeGamatiéA.Embedded Software ConferenceACM PressSeptember2006Gene-Auto: An Automatic Code Generator for
a Safe Subset of SimuLink/StateFlow and ScicosAndresToomA.TonuNaksT.MarcPantelM.MarcelGandriauM.IndraWatiI.European Conference on Embedded Real-Time
Software (ERTS'08)2008TopCased website2009http://
www.
topcased.
orgARINC Report 651-1: Design Guidance for
Integrated Modular AvionicsAirlines Electronic Engineering
CommitteeAeronautical radio, Inc.,
Annapolis, Maryland1997Technical reportARINC Specification 653: Avionics
Application Software Standard InterfaceAirlines Electronic Engineering
CommitteeAeronautical radio, Inc.,
Annapolis, Maryland1997Technical reportTimeSquareINRIA AOSTE team2009http://
www-sop.
inria.
fr/
aoste/
dev/
time_squareModeling and Analysis of Real-time and
Embedded systems (MARTE), v1.0Object Management Group (OMG)November2009http://
www.
omgmarte.
org/
node/
4Document number: formal/2009-11-02Architecture Analysis Design Language
(AADL, SAE standard ASS5506)Society of Automotive Engineers
(SAE)http://
www.
sae.
org