|
|

|

|
| e-Pub |
Section: New Results
Real-time visual perception: detection and localization of static and moving objects from a moving stereo rig
Participants : Benjamin Lefaudeux, Fawzi Nashashibi.
Perception of the surrounding environment is one of the many tasks an automated vehicle has to achieve in complex and ever-changing surroundings. This, typically includes several distinct sub-tasks, such as map-building, localization, static obstacles and moving objects detection and identification. Some of these tasks are nowadays very well known, such as the map-building process which has been extensively investigated in the last decade ; whereas the perception, localization and classification of moving objects from an equally moving vehicle are in many aspects a work in progress. The objective of the PhD thesis of Benjamin Lefaudeux was to propose a vision-based approach built on the extensive tracking of numerous visual features over time, from a stereo-vision pair.
|

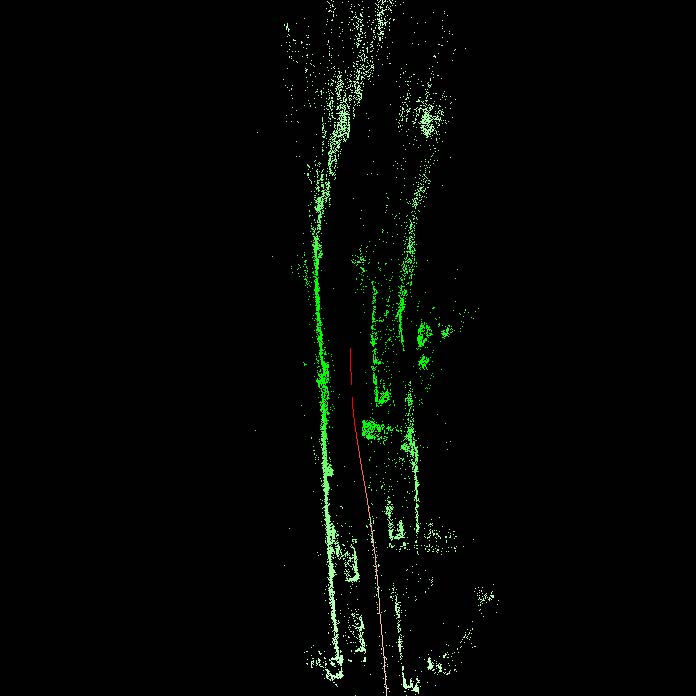
Through on-the-fly environment 3D reconstruction, based on visual clues, we proposed an integrated method to detect and localize static and moving obstacles, whose position, orientation and speed vector is estimated. Our implementation runs in real-time depending on the number of processed points, and should in the future be enclosed in a more complete, probabilistic pipeline. The complete achievements are described in the thesis of Benjamin Lefaudeux ( [8] defended on September 30th) with very interesting and competitive results obtained with international benchmarks (cf. Figure 4 ) and on the real vehicles of IMARA.