|
|

|

|
| e-Pub |
Section: New Results
3D object and scene modeling, analysis, and retrieval
|
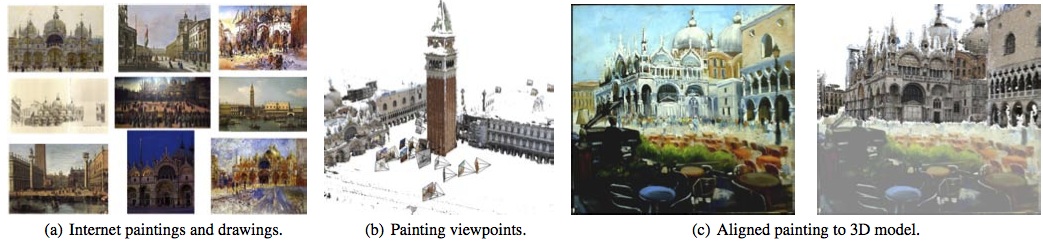
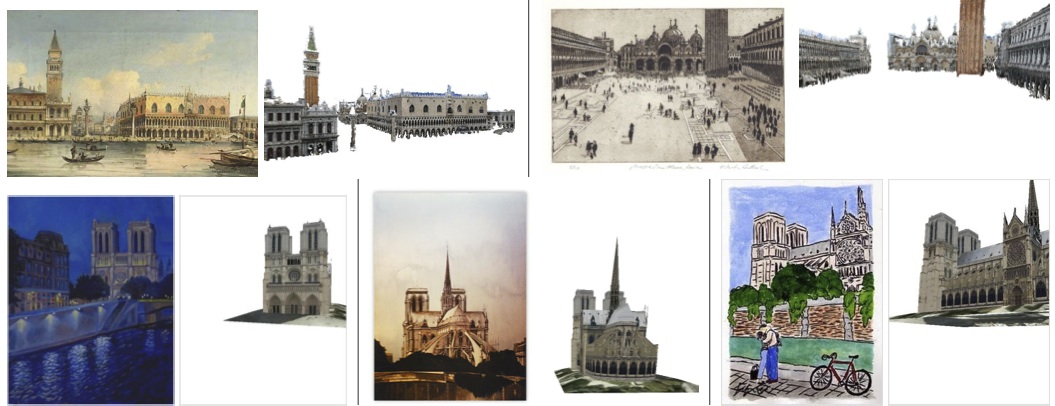
Painting-to-3D Model Alignment Via Discriminative Visual Elements
Participants : Mathieu Aubry, Bryan Russell [Intel Labs] , Josef Sivic.
In this work we describe a technique that can reliably align arbitrary 2D depictions of an architectural site, including drawings, paintings and historical photographs, with a 3D model of the site. This is a tremendously difficult task as the appearance and scene structure in the 2D depictions can be very different from the appearance and geometry of the 3D model, e.g., due to the specific rendering style, drawing error, age, lighting or change of seasons. In addition, we face a hard search problem: the number of possible alignments of the painting to a large 3D model, such as a partial reconstruction of a city, is huge. To address these issues, we develop a new compact representation of complex 3D scenes. The 3D model of the scene is represented by a small set of discriminative visual elements that are automatically learnt from rendered views. Similar to object detection, the set of visual elements, as well as the weights of individual features for each element, are learnt in a discriminative fashion. We show that the learnt visual elements are reliably matched in 2D depictions of the scene despite large variations in rendering style (e.g. watercolor, sketch, historical photograph) and structural changes (e.g. missing scene parts, large occluders) of the scene. We demonstrate an application of the proposed approach to automatic re-photography to find an approximate viewpoint of historical paintings and photographs with respect to a 3D model of the site. The proposed alignment procedure is validated via a human user study on a new database of paintings and sketches spanning several sites. The results demonstrate that our algorithm produces significantly better alignments than several baseline methods. This work has been published at ACM Transactions on Graphics 2014 [3] and its extension has appeared at RFIA 2014 [17] . The problem addressed in this work is illustrated in Figure 1 and example results are shown in Figure 2 .
|
Seeing 3D chairs: exemplar part-based 2D-3D alignment using a large dataset of CAD models
Participants : Mathieu Aubry, Bryan Russell [Intel labs] , Alyosha Efros [UC Berkeley] , Josef Sivic.
This work poses object category detection in images as a type of 2D-to-3D alignment problem, utilizing the large quantities of 3D CAD models that have been made publicly available online. Using the “chair” class as a running example, we propose an exemplar-based 3D category representation, which can explicitly model chairs of different styles as well as the large variation in viewpoint. We develop an approach to establish part-based correspondences between 3D CAD models and real photographs. This is achieved by (i) representing each 3D model using a set of view-dependent mid-level visual elements learned from synthesized views in a discriminative fashion, (ii) carefully calibrating the individual element detectors on a common dataset of negative images, and (iii) matching visual elements to the test image allowing for small mutual deformations but preserving the viewpoint and style constraints. We demonstrate the ability of our system to align 3D models with 2D objects in the challenging PASCAL VOC images, which depict a wide variety of chairs in complex scenes. This work has been published at CVPR 2014 [9] .
Anisotropic Laplace-Beltrami Operators for Shape Analysis
Participants : Mathieu Andreux [TUM] , Emanuele Rodola [TUM] , Mathieu Aubry, Daniel Cremers [TUM] .
This work introduces an anisotropic Laplace-Beltrami operator for shape analysis. While keeping useful properties of the standard Laplace-Beltrami operator, it introduces variability in the directions of principal curvature, giving rise to a more intuitive and semantically meaningful diffusion process. Although the benefits of anisotropic diffusion have already been noted in the area of mesh processing (e.g. surface regularization), focusing on the Laplacian itself, rather than on the diffusion process it induces, opens the possibility to effectively replace the omnipresent Laplace-Beltrami operator in many shape analysis methods. After providing a mathematical formulation and analysis of this new operator, we derive a practical implementation on discrete meshes. Further, we demonstrate the effectiveness of our new operator when employed in conjunction with different methods for shape segmentation and matching. This work has been published at the Sixth Workshop on Non-Rigid Shape Analysis and Deformable Image Alignment (NORDIA) 2014 [8] .
Trinocular Geometry Revisited
Participants : Jean Ponce, Martial Hebert [CMU] .
When do the visual rays associated with triplets of point correspondences converge, that is, intersect in a common point? Classical models of trinocular geometry based on the fundamental matrices and trifocal tensor associated with the corresponding cameras only provide partial answers to this fundamental question, in large part because of underlying, but seldom explicit, general configuration assumptions. In this project, we use elementary tools from projective line geometry to provide necessary and sufficient geometric and analytical conditions for convergence in terms of transversals to triplets of visual rays, without any such assumptions. In turn, this yields a novel and simple minimal parameterization of trinocular geometry for cameras with non-collinear or collinear pinholes. This work has been published at CVPR 2014 [15] .
On Image Contours of Projective Shapes
Participants : Jean Ponce, Martial Hebert [CMU] .
This work revisits classical properties of the outlines of solid shapes bounded by smooth surfaces, and shows that they can be established in a purely projective setting, without appealing to Euclidean measurements such as normals or curvatures. In particular, we give new synthetic proofs of Koenderink's famous theorem on convexities and concavities of the image contour, and of the fact that the rim turns in the same direction as the viewpoint in the tangent plane at a convex point, and in the opposite direction at a hyperbolic point. This suggests that projective geometry should not be viewed merely as an analytical device for linearizing calculations (its main role in structure from motion), but as the proper framework for studying the relation between solid shape and its perspective projections. Unlike previous work in this area, the proposed approach does not require an oriented setting, nor does it rely on any choice of coordinate system or analytical considerations. This work has been published at ECCV 2014 [14] .