|
|

|

|
| e-Pub |
Section: New Results
Volumetric 3D Tracking by Detection
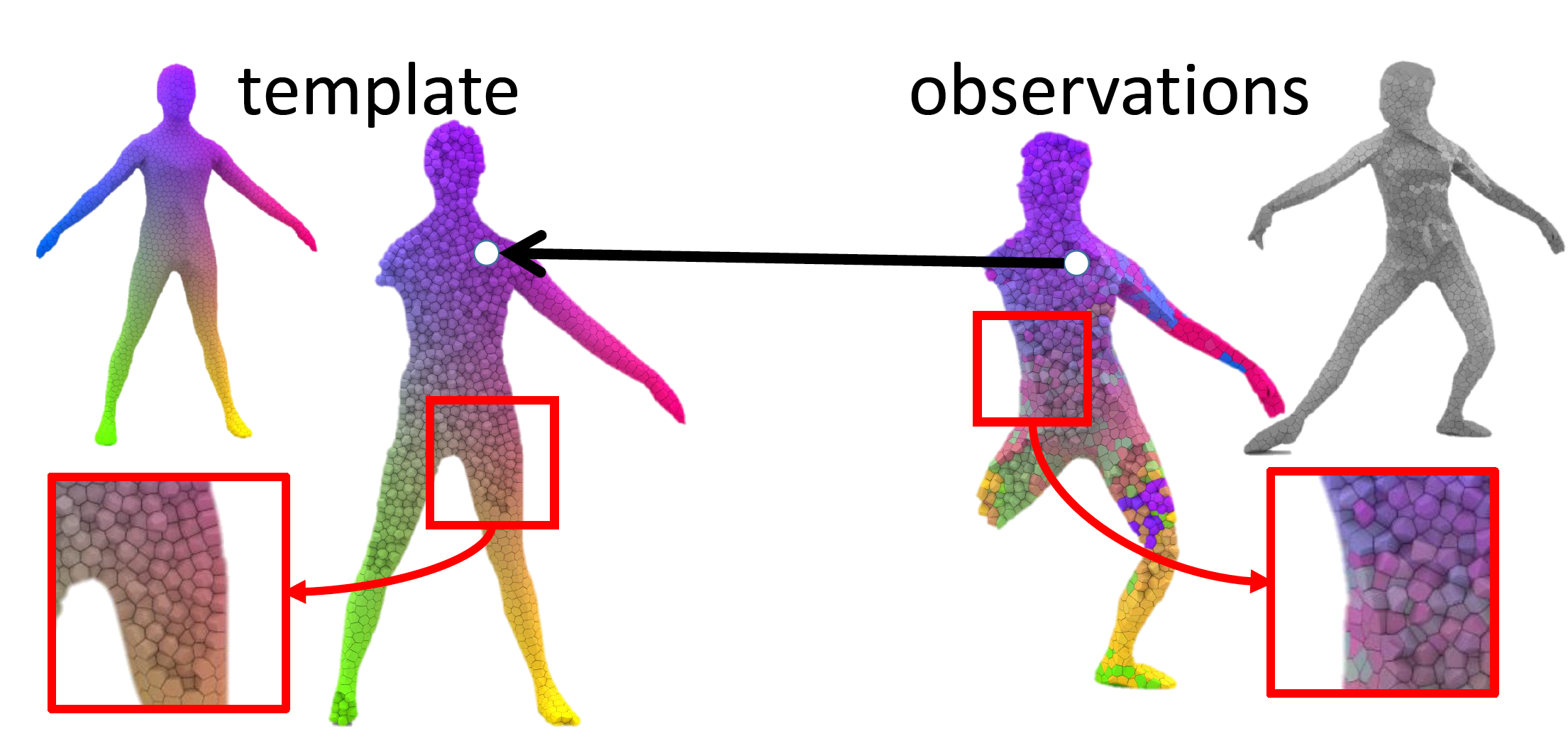
In this collaboration with TU Munich, we investigated a new solutions for 3D tracking by detection based on fully volumetric representations. On one hand, 3D tracking by detection has shown robust use in the context of interaction (Kinect) and surface tracking. On the other hand, volumetric representations have recently been proven efficient both for building 3D features and for addressing the 3D tracking problem. We leveraged these benefits by unifying both families of approaches into a single, fully volumetric tracking-by-detection framework. We used a centroidal Voronoi tessellation (CVT) representation to compactly tessellate shapes with optimal discretization, construct a feature space, and perform the tracking according to the correspondences provided by trained random forests (see figure 8). Our results show improved tracking and training computational efficiency and improved memory performance. This in turn enables the use of larger training databases than state of the art approaches, which we leveraged by proposing a cross-tracking subject training scheme to benefit from all subject sequences for all tracking situations, thus yielding better detection and less overfitting. The approach has been presented at CVPR 2016 [11].