|
|

|

|
| e-Pub |
Section: Highlights of the Year
Highlights of the Year
Award from the Robotics Society of Japan
We received a best paper award from the Robotics Society of Japan for the paper entitled “Software toolkit for modeling, simulation, and control of soft robots” that have been published in the Advanced Robotics journal. This paper presents the SoftRobots plugin as a first unified software framework dedicated to modeling, simulation and control of soft robots.
|
Development of a New Open-Source Plugin for SOFA - Model Order Reduction
The plugin Model Order Reduction (MOR) was developed based on the work of the paper [11]. It allows to reduce a SOFA finite element model to gain simulation speed while keeping a good accuracy. It can be used in the SOFA community not only for robotics, but for any application where computational time is an issue, e.g. medical simulations. It is distributed under the GPL license and is available on github: https://github.com/SofaDefrost/ModelOrderReduction.
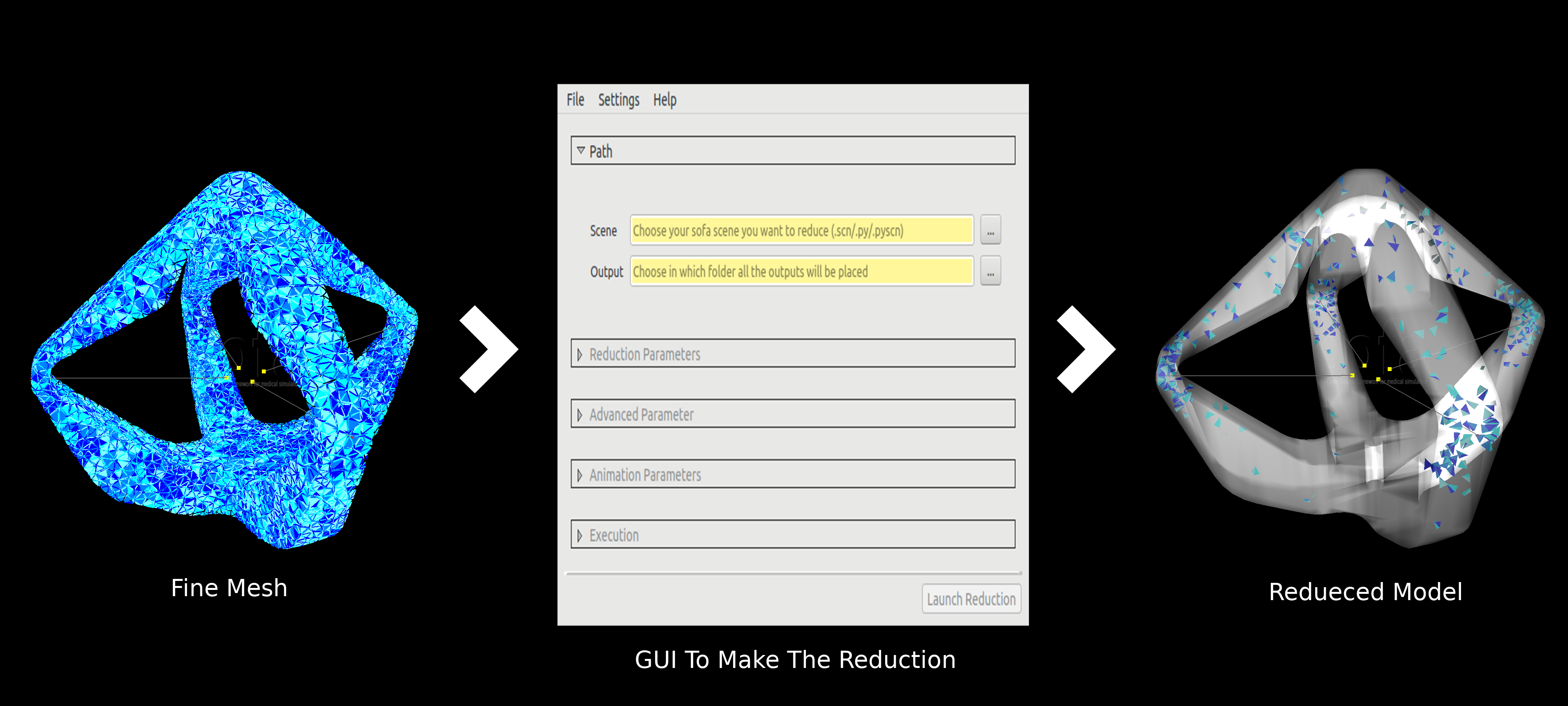
The plugin is a combination of C++ and Python Code. The user can define the reduction parameters using a python Script or a Graphical User Interface (GUI).
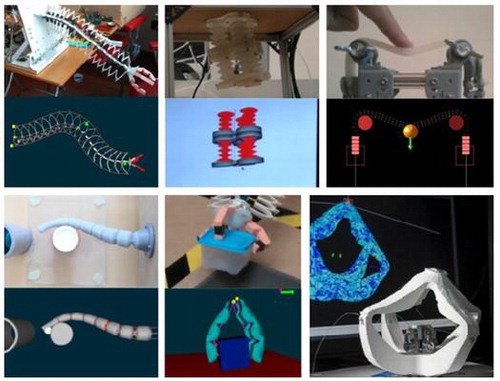
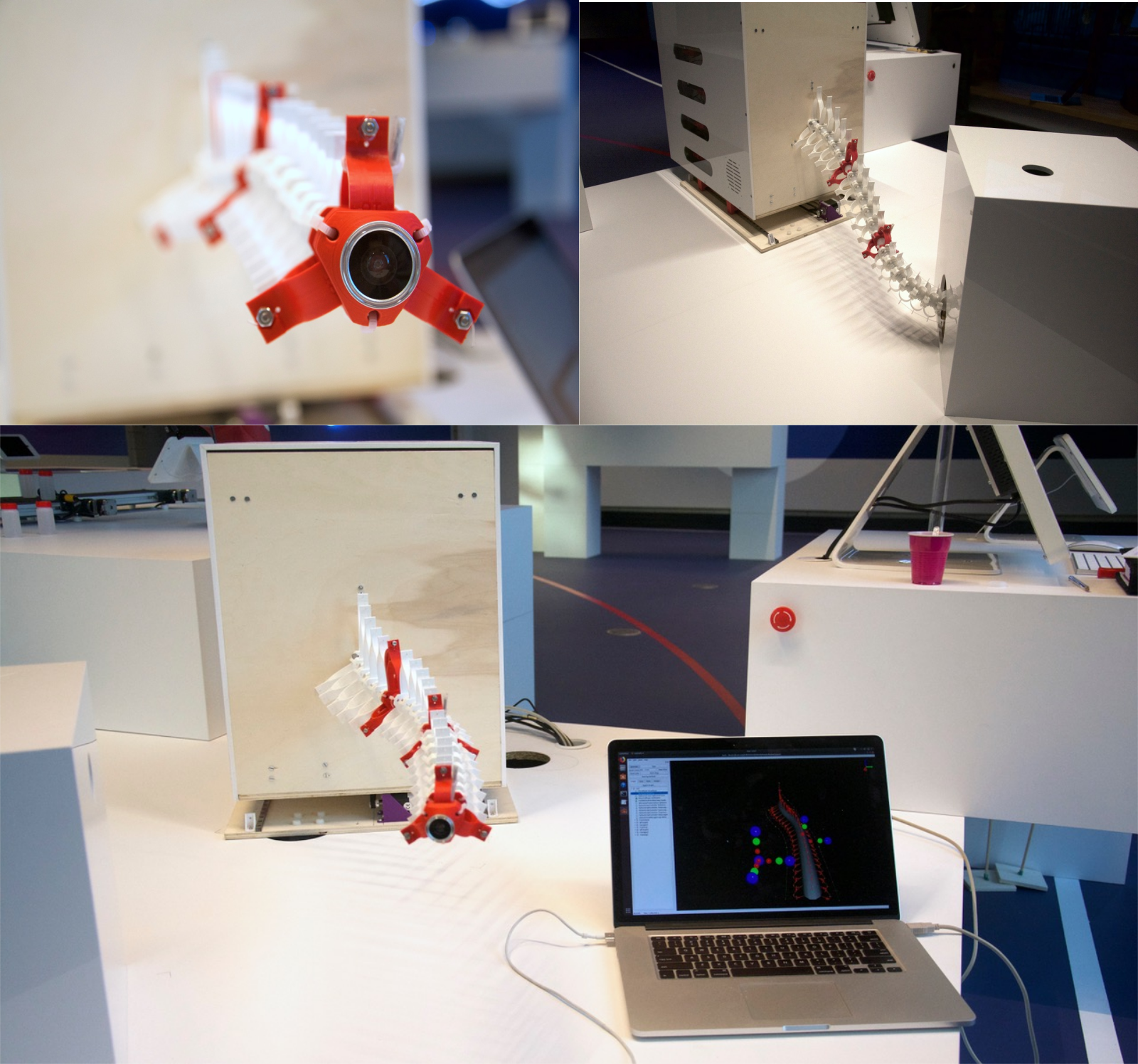
Echelon III: A compliant manipulator
We have participated to the grand challenge of RobotSoft conference that took place in Linorvo, Italy. We have build a robot dedicated to the manipulation competition and we got the 2nd place. A new version of the robot has been developed for the Inria Showroom, installed at Euratechnology in Lille. This version, equipped with a camera, demonstrates the ability of the robot to perform inspection tasks in a limited workspace. We plan to build a new version in 2019 to use it as a research platform, in particular to test planning and control algorithms.
Collaboration with Allison Okamura's team at Stanford
This year we had a very close collaboration with the CHARM Lab directed by Allison Okamura at Stanford University. This collaboration resulted in two exchanges: A Stanford PhD student, Margaret Koehler came for 6 months from September 2017 to February 2018 in the team in Lille and Christian Duriez left 7 months of February to August 2018, (thanks to a Fulbright fellowship). We mainly investigated two projects: the haptic rendering on deformable interfaces (A publication in the RAL journal has just been accepted and will be published in 2019) and on the project “Vine Robot” (eversion locomotion). Our teams continue to work on these project. We have also applied to the “Equipe Associée” program.
Best Paper Award:
[2]Software toolkit for modeling, simulation, and control of soft robots, in: Advanced Robotics, 2017.
https://doi.org/10.1080/01691864.2017.1395362