|
|

|

|
| e-Pub |
Section: New Results
Cooperative driving
Participants : Joshué Pérez Rastelli, Fawzi Nashashibi.
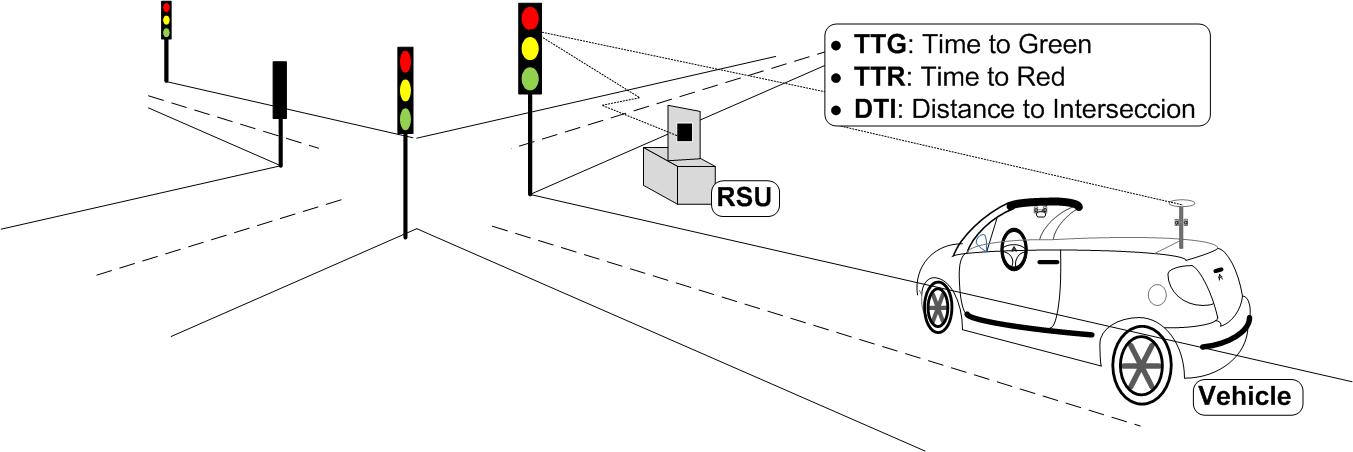
In the scope of the French project “Co-Drive” one task assigned to Inria was the development of a smart controller capable of driving the vehicle, allowing it to perform optimal traversal of traffic lights in order to reduce vehicle accelerations and thus the gas emissions. This controller needs remote information regarding the traffic lights' status, the distance to it and the time needed to reach it.
Three input variables, which are the traffic light times, red light, green light and the distance to interception (DTI), were defined in fuzzy logic tool [37] .
Two variables are used for the traffic light (Red and Green), where each of them has defined two completely symmetrical membership functions covering all the possible inputs. In this application the time cycle of the lights are 30 seconds for green and 20 seconds for red. The values of input membership functions were defined considering these times.
The DTI membership function (see Figure 1 ) gives more weight to the distance when the vehicle is closer at the intersection. In this situation, the vehicle can be inside the short or the middle label, because in these cases the response has to be faster than in the case where the vehicle is in the long label. The cross rule base, based on driver knowledge when the vehicle is arriving to an intersection, are defined using natural language.
Some Simulations were performed to validate the controller. However, the final implementation will be presented in 2014 during the final event of Co-Drive Project.