|
|

|

|
| e-Pub |
Section: New Results
Intelligent Planning algorithm using Bezier curves
Participants : Joshué Pérez Rastelli, Fawzi Nashashibi.
The Bezier curve is the heart of the Local Planning, which allows a fast trajectory computation in order to send the trajectory in real-time to the controller stage. This method has been recently used in robot mobile solutions due to its versatility and simplicity for intersections.
We have proposed a novel method for the generation of control points for two distinct road configurations: roundabouts and a standard intersections. If an intersection is being dealt with, the control points will be generated based on the reference path given by the Global Planner.
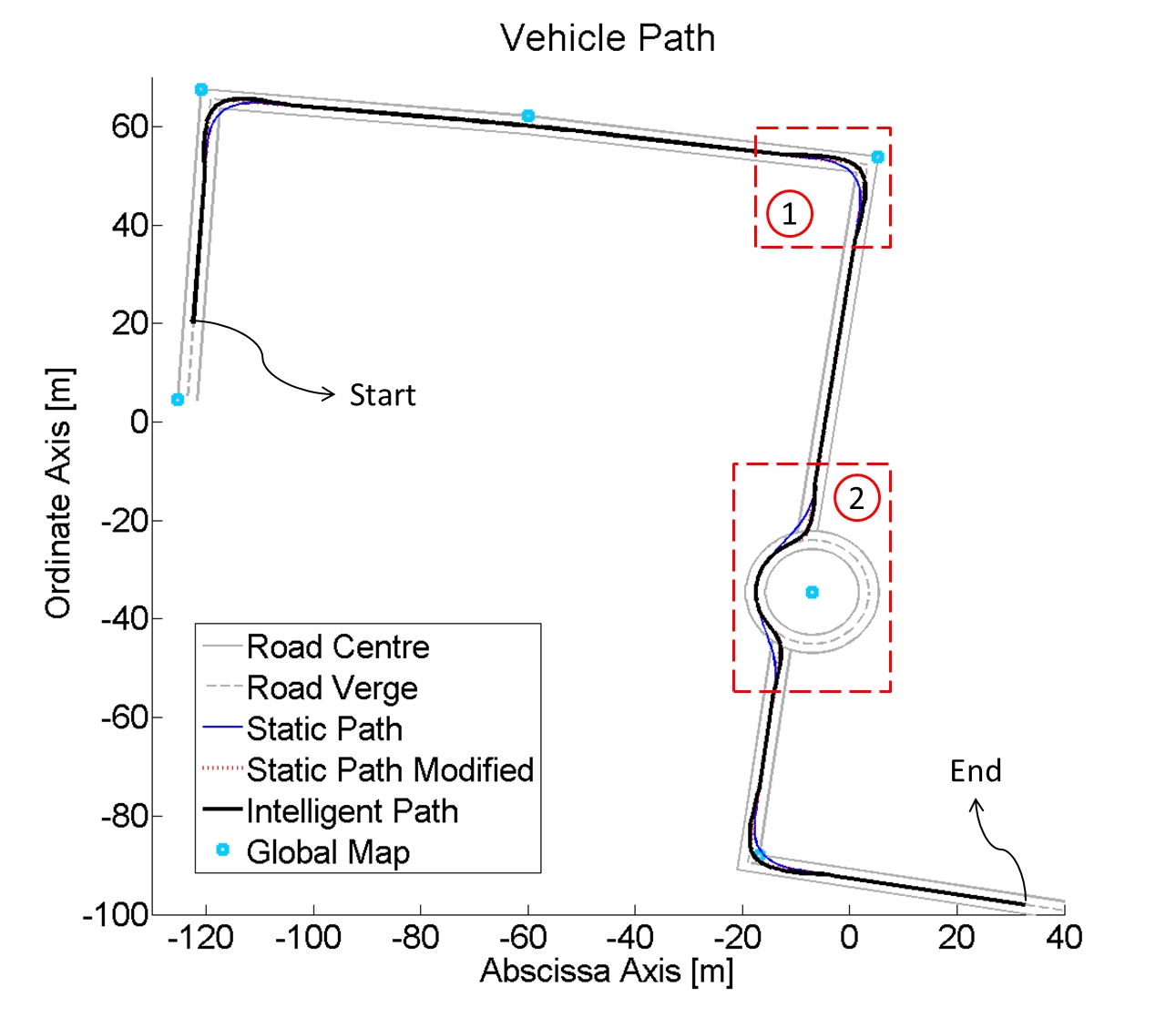
The experiments we made presented several urban intersections. Figure 2 shows the whole generated path with four intersections and a roundabout, using the global map. A comparison with different methods is drawn. The first one (thin line) is based on the static method used in [22] , which sets the control points by hand. In this case we can see how sometimes the path passes over the sidewalk. The second experiment (dotted line) is using the same previous method, but modifying the distance used to position the control points, in order to obtain a path into the road. The third method (thick line) is the Intelligent Planning algorithm. As we can see in the figure, the automatic algorithm sets the control points of Bezier (based on the convex hull property) achieving a smooth path, without going over sidewalks or obstacles.