|
|

|

|
| e-Pub |
Section: Highlights of the Year
Highlights of the Year
New Research scientist
Olivier Goury was selected to join the team as new Inria research scientist.
Robosoft Grand Challenge
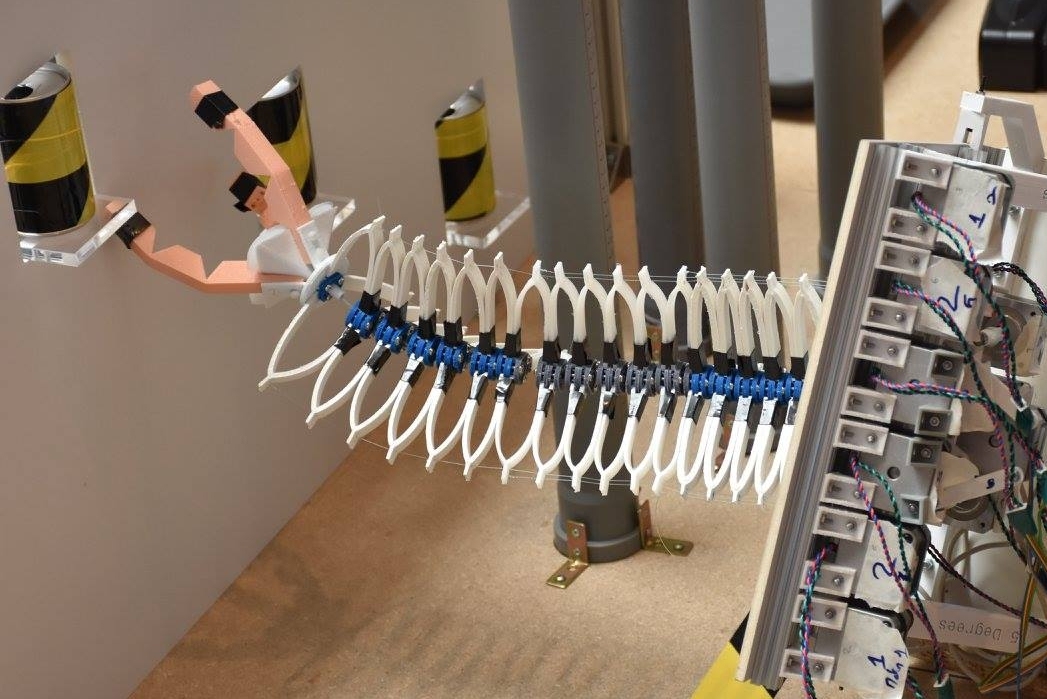
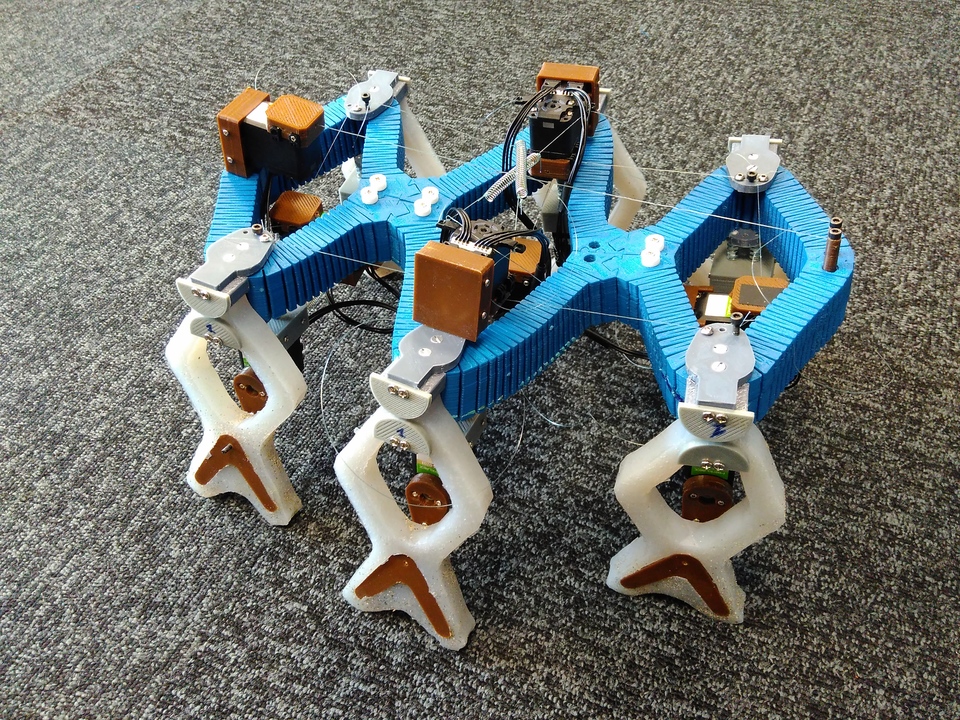
The team participated in the Robosoft Week in Livorno, with a workshop on simulation of soft robots held by Christian Duriez, Thor Bieze and Eulalie Coevoet. In addition, 2 prototypes were presented to the Robosoft Grand Challenge, reaching the 4th place of the competition.
ERC evaluation grade A
The project COMOROS submitted for ERC Consolidator "fully met the ERC's excellence criterion" and evaluated as grade A. Unfortunately, it could not be funded, given the available budgetary resources of ERC for the call. But the region Haut-De-France should be able to finance a part of the project during the 3 coming years thanks to the FEDER funds.