

Section: New Results
Web robotics
Participants : Ludovic Courtès, Cyprien Nicolas, Vincent Prunet [correspondant] , Manuel Serrano.
Cable driven robots
The sound design of modern robotic applications demands for the configuration-time integration of various subsystems which together constitute a robot. APIs and protocols such as ROS (Robot Operating System) provide robot designers with tools to combine software and hardware components into a complete robot. In addition, more and more robots need to share information or interact with diffuse objects available in the robot neighborhood, and also with remote services, to log data (typically activity monitoring data in the case of an assistance robot), to send information messages (alarms or triggering events to some other infrastructure), to subscribe to services provided by objects or remote servers, to provide services that may help peer entities, to get new behaviors by downloading and installing applications within the robot. We develop tools and architectures to address these requirements using Hop as our main platform. We experiment software architectures involving robots, web objects, several integration models with third party components (hardware, software computation libraries for robotics, stand-alone robots), protocols, and libraries.
We pursued the joint work with Coprin Team about using Hop to coordinate a cable-driven robot. We changed the hardware on which Hop runs to a mini-PC instead of a standard laptop, plugged a wireless router, and used the wireless network from a tablet to move the robot. We also improved the robot hardware and software. The setup has been summarized in a paper [13] and presented at a national conference on robotics.
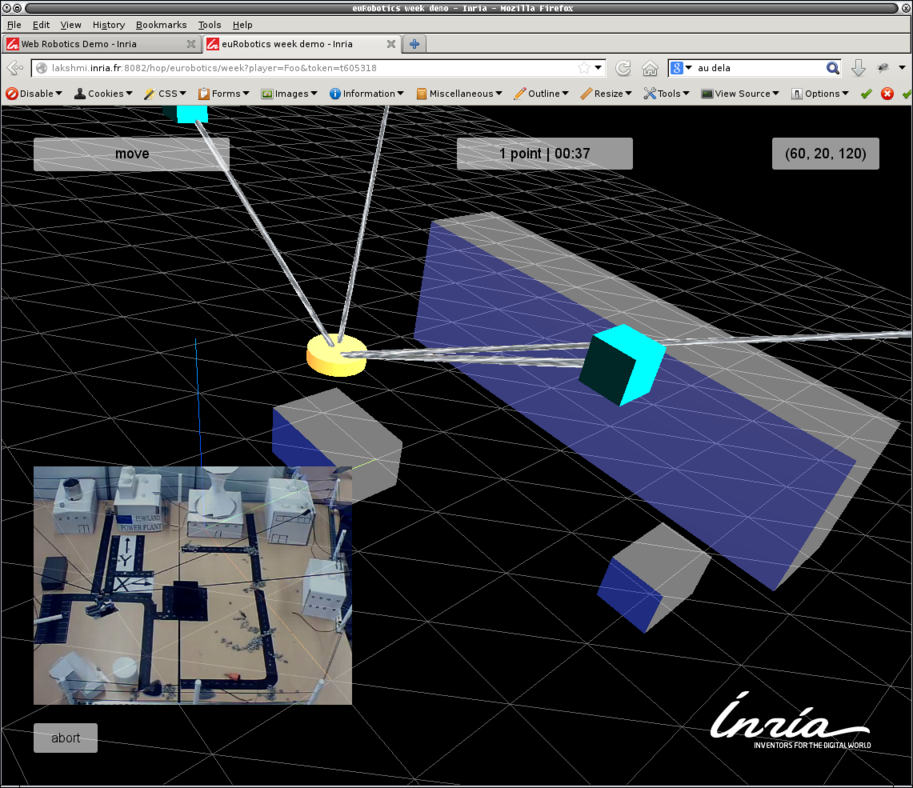
Web Robotics
Web Robotics is a two years Inria ADT project targeting the development of technical foundations (libraries and toolkits) and demos of web enabled robots. The project is led by Indes (Vincent Prunet, Manuel Serrano), software development is supported by Inria SED (Ludovic Courtès), robots are provided by Inria Coprin. A demonstrator and dissemination platform consisting of a cable robot and dedicated web services have been set up to enable people to interact with the robot through a web server (web http://webrobotics.inria.fr:8080/hop/welcome ).
The web robotics demo demonstrates:
Hop added value is to provide:
-
an unconstrained specification environment where data and services are easily shared among servers and clients;
-
a seamless, plugin free, integration into standard web browsers.
Also in 2013, Indes has joined the PAL (Person Assisted Living) Inria project, to develop web enabled applications within the project.