Section: New Results
Registration of Multiple Point Sets
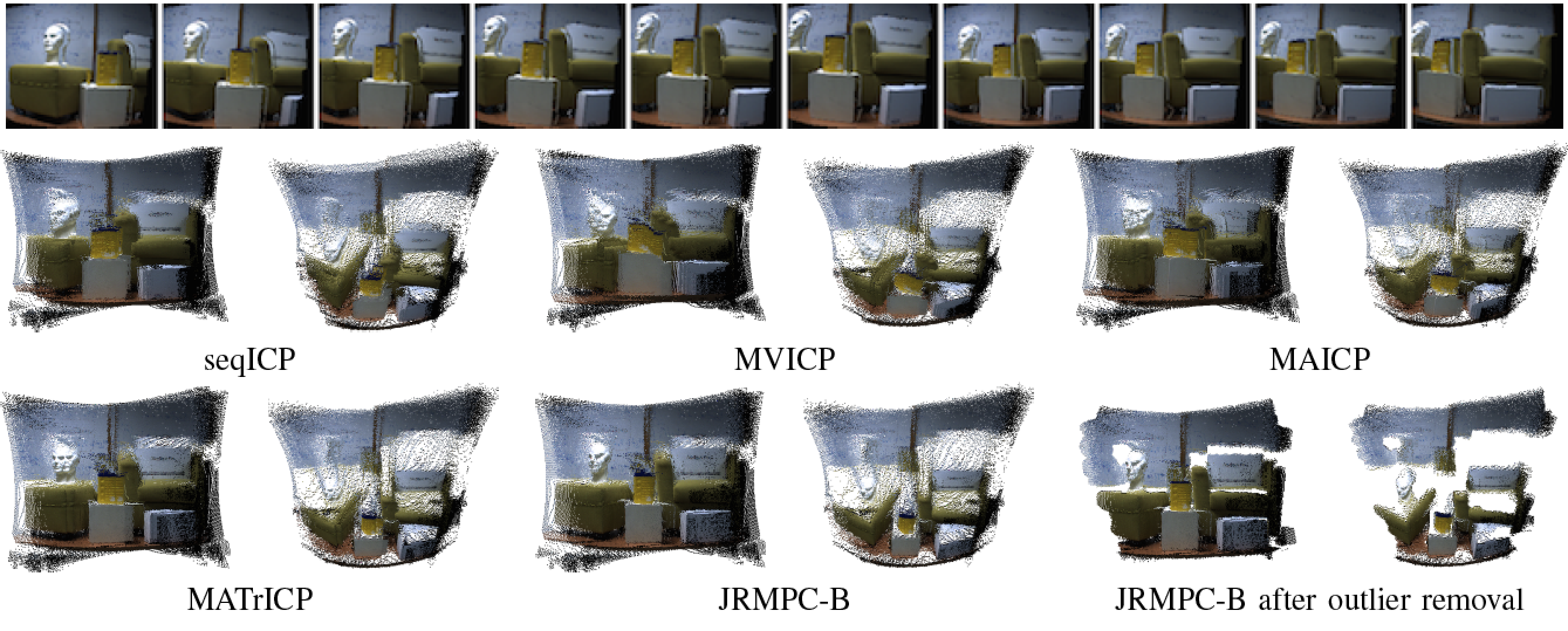
We have also addressed the rigid registration problem of multiple 3D point sets. While the vast majority of state-of-the-art techniques build on pairwise registration, we proposed a generative model that explains jointly registered multiple sets: back-transformed points are considered realizations of a single Gaussian mixture model (GMM) whose means play the role of the (unknown) scene points. Under this assumption, the joint registration problem is cast into a probabilistic clustering framework. We formally derive an expectation-maximization procedure that robustly estimates both the GMM parameters and the rigid transformations that map each individual cloud onto an under-construction reference set, that is, the GMM means. GMM variances carry rich information as well, thus leading to a noise- and outlier-free scene model as a by-product. A second version of the algorithm is also proposed whereby newly captured sets can be registered online. A thorough discussion and validation on challenging data-sets against several state-of-the-art methods confirm the potential of the proposed model for jointly registering real depth data [35].
Website: https://team.inria.fr/perception/research/jrmpc/
|