
Keywords
Computer Science and Digital Science
- A1.2.6. Sensor networks
- A1.3. Distributed Systems
- A2.3. Embedded and cyber-physical systems
- A2.5.2. Component-based Design
- A4.4. Security of equipment and software
- A4.5. Formal methods for security
- A5.1.4. Brain-computer interfaces, physiological computing
- A5.10.5. Robot interaction (with the environment, humans, other robots)
- A6.1.1. Continuous Modeling (PDE, ODE)
- A6.3.2. Data assimilation
- A6.4.1. Deterministic control
Other Research Topics and Application Domains
- B1.2.1. Understanding and simulation of the brain and the nervous system
- B2.2.1. Cardiovascular and respiratory diseases
- B2.2.2. Nervous system and endocrinology
- B2.2.6. Neurodegenerative diseases
- B2.5.1. Sensorimotor disabilities
- B2.5.3. Assistance for elderly
1 Team members, visitors, external collaborators
Research Scientists
- Christine Azevedo Coste [Team leader, Inria, Senior Researcher, HDR]
- François Bonnetblanc [Inria, Researcher, HDR]
- Charles Fattal [USSAP Perpignan, Researcher, HDR]
- David Guiraud [Inria, Senior Researcher, HDR]
- Daniel Simon [Inria, Researcher, until Sep 2020, HDR]
Post-Doctoral Fellows
- Francois Bailly [Université de Montréal - Canada, from Sep 2020]
- Xinyue Lu [Univ de Montpellier, from Apr 2020 until Nov 2020]
- Lucas Oliveira Da Fonseca [Inria]
- Martin Schmoll [Univ de Montpellier, until Jul 2020]
- Thekla Stefanou [Inria, from Nov 2020]
PhD Students
- Vincent Iampietro [Univ de Montpellier]
- Ronan Le Guillou [Centre hospitalier universitaire de Toulouse, from Dec 2020]
- Xinyue Lu [SIRMED-LES AIRES, until Apr 2020]
- Helene Moron [Centre hospitalier universitaire de Nîmes]
- Clement Trotobas [Inria, from Sep 2020]
- Lucie William [Inria]
Technical Staff
- Arthur Hiairrassary [Inria, Engineer, until Jun 2020]
- Ronan Le Guillou [Inria, Engineer, until Nov 2020]
- Benoît Sijobert [Institut Saint Pierre, Engineer, from Sep 2020]
- Guillaume Souquet [Univ de Montpellier, Engineer, until Jan 2020]
Interns and Apprentices
- Eva Berceron [Inria, from Mar 2020 until Aug 2020]
- Rodolfo Bettencourt Pereira Cerqueira [Université du Minho - Portugal, from Oct 2020]
- Sandrine Gayrard [Inria, from Feb 2020 until Jul 2020]
- Esther Geruna [Inria, from April 2020 until July 2020]
- Abella Lemestre [Univ de Montpellier, from Apr 2020 until May 2020]
- Luis Miguel Marques Martins [Université du Minho - Portugal, from Oct 2020]
- Camilo Silva Rebocho Vaz [Université du Minho - Portugal, until Feb 2020]
Administrative Assistant
- Annie Aliaga [Inria]
Visiting Scientist
- Fernanda Rodriguez Ferreira Lopez [Universidade Federal de Minas Gerais - Brésil, from Sep 2020]
2 Overall objectives
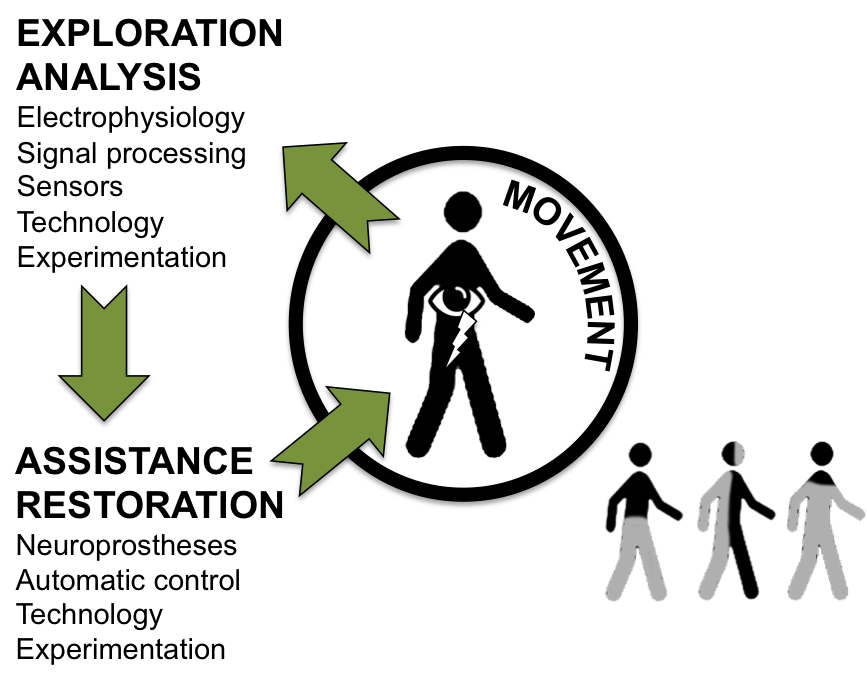
CAMIN research team is dedicated to the design and development of realistic neuroprosthetic solutions for sensorimotor deficiencies in collaboration with clinical partners. Our efforts are focused on clinical impact: improving the functional evaluation and/or patients quality of life. Movement is at the center of our investigative activity, and the exploration and understanding of the origins and control of movement are one of our two main research priorities. Indeed, optimizing the neuroprosthetic solutions depends on a deeper understanding of the roles of the central and peripheral nervous systems in motion control. The second research priority is movement assistance and/or restoration. Based on the results from our first research focus, neuroprosthetic approaches are deployed (Figure 1).
Electrical stimulation (ES) is used to activate muscle contractions by recruiting muscle fibers, just as the action potentials initiated in motoneurons would normally do. When a nerve is stimulated, both afferent (sensitive) and efferent (motor) pathways are excited. ES can be applied externally using surface electrodes positioned on the skin over the nerves/muscles intended to be activated or by implantation with electrodes positioned at the contact with the nerves/muscles or neural structures (brain and spinal cord). ES is the only way to restore movement in many situations.
Although this technique has been known for decades, substantial challenges remain, including: (i) detecting and reducing the increased early fatigue induced by artificial recruitment, (ii) finding solutions to nonselective stimulation, which may elicit undesired effects, and (iii) allowing for complex amplitude and time modulations of ES in order to produce complex system responses (synergies, coordinated movements, meaningful sensory feedback, high-level autonomic function control).
We investigate functional restoration, as either a neurological rehabilitation solution (incomplete spinal cord injury (SCI), hemiplegia) or for permanent assistance (complete SCI). Each of these contexts imposed its own set of constraints on the development of solutions.
Functional ES (FES) rehabilitation mainly involves external FES, with the objective to increase neurological recuperation by activating muscle contractions and stimulating both efferent and afferent pathways. Our work in this area naturally led us to take an increasing interest in brain organization and plasticity, as well as central nervous system (brain, spinal cord) responses to ES. When the objective of FES is a permanent assistive aid, invasive solutions can be deployed. We pilot several animal studies to investigate neurophysiological responses to ES and validate models. We also apply some of our technological developments in the context of human per-operative surgery, including motor and sensory ES.
Camin research is focused on exploring and understanding human movement in order to propose neuroprosthetic solutions in sensorimotor deficiency situations to assist or restore movement. Exploration and understanding of human movement will allow us to propose assessment approaches and tools for diagnosis and evaluation purposes, as well as to improve FES-based solutions for functional assistance.
We have chosen not to restrict our investigation spectrum to specific applications but rather to deploy our general approach to a variety of clinical applications in collaboration with our medical partners. Our motivation and ambition is to have an effective clinical impact.
3 Research program
3.1 Exploration and understanding of the origins and control of movement
One of Camin’s areas of expertise is motion measurement, observation and modeling in the context of sensorimotor deficiencies. The team has the capacity to design advanced protocols to explore motor control mechanisms in more or less invasive conditions in both animal and human.
Human movement can be assessed by several noninvasive means, from motion observation (MOCAP, IMU) to electrophysiological measurements (afferent ENG, EMG, see below). Our general approach is to develop solutions that are realistic in terms of clinical or home use by clinical staff and/or patients for diagnosis and assessment purposes. In doing so, we try to gain a better understanding of motor control mechanisms, including deficient ones, which in turn will give us greater insight into the basics of human motor control. Our ultimate goal is to optimally match a neuroprosthesis to the targeted sensorimotor deficiency.
The team is involved in research projects including:
-
Peripheral nervous system (PNS) exploration, modeling and electrophysiology techniques
Electroneurography (ENG) and electromyography (EMG) signals inform about neural and muscular activities. The team investigates both natural and evoked ENG/EMG through advanced and dedicated signal processing methods. Evoked responses to ES are very precious information for understanding neurophysiological mechanisms, as both the input (ES) and the output (evoked EMG/ENG) are controlled. Camin has the expertise to perform animal experiments (rabbits, rats, earthworms and big animals with partners), design hardware and software setups to stimulate and record in harsh conditions, process signals, analyze results and develop models of the observed mechanisms. Experimental surgery is mandatory in our research prior to invasive interventions in humans. It allows us to validate our protocols from theoretical, practical and technical aspects.
-
Central nervous system (CNS) exploration
Stimulating the CNS directly instead of nerves allows activation of the neural networks responsible for generating functions. Once again, if selectivity is achieved the number of implanted electrodes and cables would be reduced, as would the energy demand. We have investigated spinal electrical stimulation in animals (pigs) for urinary track and lower limb function management. This work is very important in terms of both future applications and the increase in knowledge about spinal circuitry. The challenges are technical, experimental and theoretical, and the preliminary results have enabled us to test some selectivity modalities through matrix electrode stimulation. This research area will be further intensified in the future as one of ways to improve neuroprosthetic solutions.
We intend to gain a better understanding of the electrophysiological effects of DES through electroencephalographic (EEG) and electrocorticographic (ECoG) recordings in order to optimize anatomo-functional brain mapping, better understand brain dynamics and plasticity, and improve surgical planning, rehabilitation, and the quality of life of patients.
-
Muscle models and fatigue exploration
Muscle fatigue is one of the major limitations in all FES studies. Simply, the muscle torque varies over time even when the same stimulation pattern is applied. As there is also muscle recovery when there is a rest between stimulations, modeling the fatigue is almost an impossible task. Therefore, it is essential to monitor the muscle state and assess the expected muscle response by FES to improve the current FES system in the direction of greater adaptive force/torque control in the presence of muscle fatigue.
-
Movement interpretation
We intend to develop ambulatory solutions to allow ecological observation. We have extensively investigated the possibility of using inertial measurement units (IMUs) within body area networks to observe movement and assess posture and gait variables. We have also proposed extracting gait parameters like stride length and foot-ground clearance for evaluation and diagnosis purposes.
3.2 Movement assistance and/or restoration
The challenges in movement restoration are: (i) improving nerve/muscle stimulation modalities and efficiency and (ii) global management of the function that is being restored in interaction with the rest of the body under voluntary control. For this, both local (muscle) and global (function) controls have to be considered.
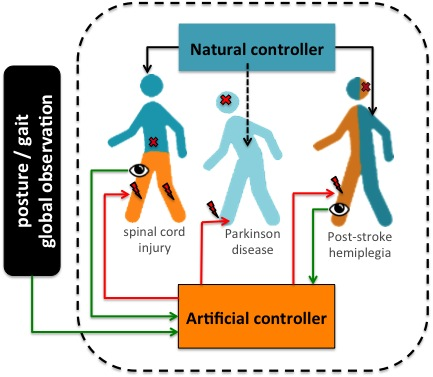
Online modulation of ES parameters in the context of lower limb functional assistance requires the availability of information about the ongoing movement. Different levels of complexity can be considered, going from simple open-loop to complex control laws (Figure 2).
Real-time adaptation of the stimulation patterns is an important challenge in most of the clinical applications we consider. The modulation of ES parameters to adapt to the occurrence of muscular fatigue or to environement changes needs for advanced adaptive controllers based on sensory information. A special care in minimizing the number of sensors and their impact on patient motion should be taken.
4 Application domains
4.1 Movement Assistance
CAMIN develops neuroprosthetic solutions dedicated to restore or assist movements of paralyzed limbs. Among the considered functions we can cite: pedalling, grasping, walking. Different users are considered: individuals with post-stroke hemiplegia, people with spinal cord lesions, persons with Parkinson disease.
We have also started to develop skills in orthosis design.
4.2 Movement Analysis
For the purpose of assisting movement, CAMIN has developped an important expertise in movement interpretation using a large range of sensors: inertial measurement units, MOCAP systems, encoders, goniometers... Various Classification methods are used depending on the objective.
This knowledge is applied in other applications than movement assistance, like in MEDITAPARK project were we developped an application (PARAKEET) embedded in a smartwatch to monitor hand tremor in persons with parkinson disease.
4.3 Evoked electrophysiology
CAMIN develops solutions to trigger, record and process electrophysiological signals evoked by electrical stimulation applied to various neural tissues. These evoked responses are used to control the activity of the excitable tissue, to probe its electrophysiological status for diagnostic purposes and to investigate the conductivity/connectivity between the stimulation and the recording sites (electrophysiological mapping).
These neural engineering procedures can be applied to muscle, nerve, spinal cord and brain, in animal and humans.
For instance, electrical stimulations can be applied externally and non-invasively on muscles to induce muscle contractions for instance as well as invasively on the human brain in order to guide neurosurgeries.
5 Social and environmental responsibility
5.1 Impact of research results
CAMIN research is clearly dedicated to applications which intend to improve quality of life and/or self esteem of individuals with sensori-motor deficiencies.
We give a very important place to ethics of our work. Christine Azevedo is a member of INRIA ethical committee INRIA.
6 Highlights of the year
6.1 Awards
Christine Azevedo "nomination au grade de chevalier de l'ordre national du mérite".
7 New software and platforms
7.1 New software
7.1.1 RT_Stim
- Name: Real-Time simulation for functional electrical Stimulation
- Keywords: Real time, Biomechanics, Control, Co-simulation
- Functional Description: Hybrid simulation architecture gathering in a single framework and consistent time scales both the numerical integration of the continuous model of a bio-mechanical system (bones, joints and muscles) and a model of the hardware and software control architecture, including control tasks, communication protocols and real-time schedulers. Simulation run in real-time when possible, and otherwise consistent time scales are generated. The framework is intended to seamlessly evolve from purely software models to hardware-in-the-loop simulation.
-
URL:
https://
gitlab. inria. fr/ CAMIN/ rt_stim/ rtstim - Authors: Daniel Simon, Samy Lafnoune
- Contact: Daniel Simon
7.2 New platforms
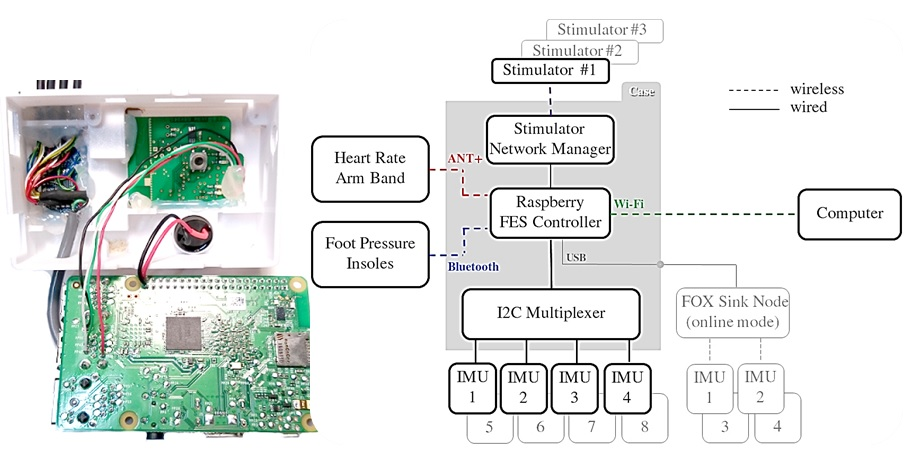
7.2.1 Platform : IMUSEF Modular embedded architecture for real time control of a FES system
Participants: Christine Azevedo Coste, Benoît Sijobert, Ronan Le Guillou, Martin Schmoll.
We have been working on the development of a new hardware and software architecture embedding a network of sensors and an electrical stimulator interfaced to a controller. The controller intends to be worn by the experiment participants.
A mini low-cost single board computer (Raspberry Pi3) was embedded in a 3D-printed case strapped around the waist of the subject. Using wireless inertial sensors connected as a WBAN, the sink node gets data from all the IMUs, therefore highly decreasing data flow when multiple IMUs are transmitting inside the network. To get rid of this limitation and guarantee an overall 100 Hz sampling rate no matter the number of IMUs, the wireless inertial sensors can be replaced by wired ones, low-cost with a high speed ARM Cortex-M0 based processor and a Kalman Filter directly providing quaternion estimation at 100 Hz for each IMU. The use of a multiplexer connected through an I2C interface (Inter Integrated Circuit) enabled to keep a 100 Hz rate using 4 IMUs.
The autonomous FES controller is able to acquire and process data, execute control algorithms and send the appropriate command to the stimulator. For safety reasons, in order to access to the FES controller and to enable a remote access to the stimulation from a computer, an ad-hoc Wi-Fi network is automatically provided by the Raspberry on start-up. The ad-hoc network enables to be independent from a network infrastructure where the connection is not always possible (e.g. Wi-Fi network from the hospital).
This scalable architecture (fig. 3), developed as a modular system, allowed us to implement new commands laws for Real Time closed loop control as well as giving us the possibility to use various types of sensors and stimulators to meet the needs of specific applications. To achieve this and in order for the FES architecture to directly control different electrical stimulators, Application Programming Interfaces (APIs) were developed for 3 main commercial stimulators in the team. They each corresponds to a specific need and use case. The Vivaltis Phoenix Stimulator allows for low-weight embedding, wireless network control, but only 2 stimulation channels are available at the moment, while being scalable, it is mainly used for experiments on gait. The BerkelBike Stimulator v2.0 presents a cumbersome but extended control compromise with 8 independent stimulation channels, which is an ideal solution for FES-assisted cycling. And finally the Hasomed Rehastim v1.0 allowing fine control but isn't battery powered in its commercial version, used mainly for upper limb experiments.
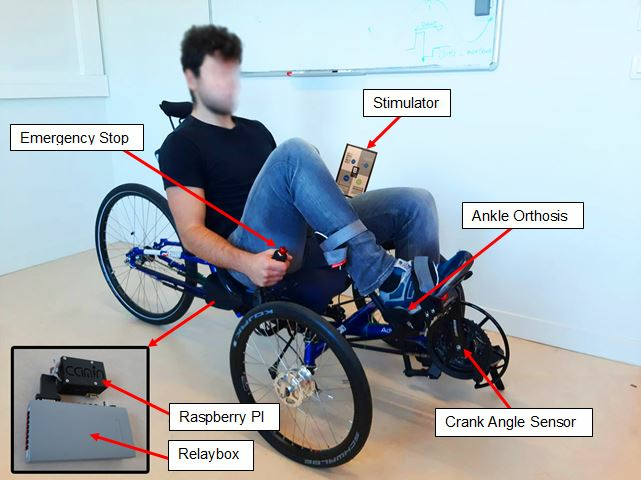
7.2.2 Platform : FESCYCLING FES-cycling platforms
Participants: Christine Azevedo Coste, Ronan Le Guillou, Martin Schmoll.
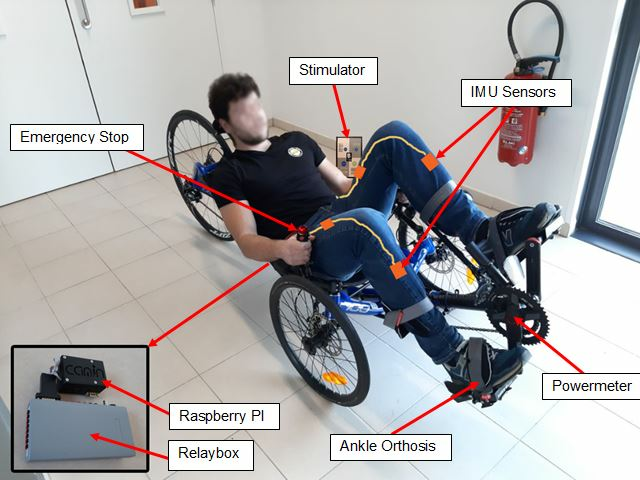
The embedded FES controller (IMUSEF) was reshaped for cycling application to improve modularity, performances and stability, using fully the capabilities of the Raspberry Pi 3B platform. These modifications now allow easier implementation, integration and usage of new control algorithms that could, in the future, be used for various end applications and contexts. Furthermore a Graphical User Interface (GUI) communicating with the embedded platform was developed, allowing on-the-fly modification of various parameters as well as safe control and monitoring of the running algorithms. An add-on relay box module allowing mechanical switching of the stimulating channels for more precise On/Off stimulation synchronization as well as more control and safety measures was also created. The two commercially available recumbent tricycles that we adapted for Spinal Cord Injured FES Cycling can be seen in Figure 4.
7.2.3 Platform : MEDITAPARK Wearable Tremor monitoring system based on acceleration monitoring
Participants: Christine Azevedo Coste, Esther Geruna, Ronan Le Guillou, Marion Holvoet.
As part of a preliminary study on the effects of Mindfulness meditation on participants with Parkinson's Disease (PD) (§2), an application was developed to monitor at home tremor occurrence using a smartwatch Samsung Gear S3 and its newer model, the Samsung Galaxy Watch (Fig:5). A Python program has been developed to process and format data and present characteristics of the tremor under a user friendly and comprehensible format for clinicians. The goal of this system being to identify Parkinson's tremors characteristics qualitatively and quantitatively to highlight global tendencies and help objectively determine effectiveness of diverse treatments against PD tremors. This system was tested on long duration acquisitions (2 and 4 days) with 2 volunteers subject to PD tremors of moderate and high severity and proved to be able to highlight tremor tendencies and characteristics in real conditions. These acquisitions were done in order to experimentally validate the inner-workings of the developed system in real conditions and its capacity to detect PD tremors of moderate and high severity as well as to refine the classification and processing of the data. An example of 4 days acquisition is presented in Figure 5.


The created system allows qualification of tremors in punctual clinical check-ups in the hospital as well as quantitative formatting of daily tendencies. This system should then allow to highlight the evolution of Parkinson's tremors characteristics throughout the MBSR (Mind-fullness Based Stress Reduction) meditation program which is yet to be undertaken. A protocol is still waiting for validation from the CPP to begin inclusions and conduct the MBSR meditation program, monitored with the developed system.
7.2.4 Platform : AGILIS-EX software
Participants: Arthur Hiairrassary, Christine Azevedo Coste, David Guiraud.
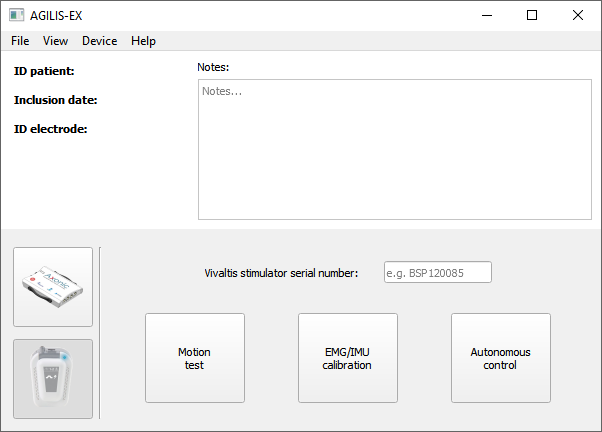
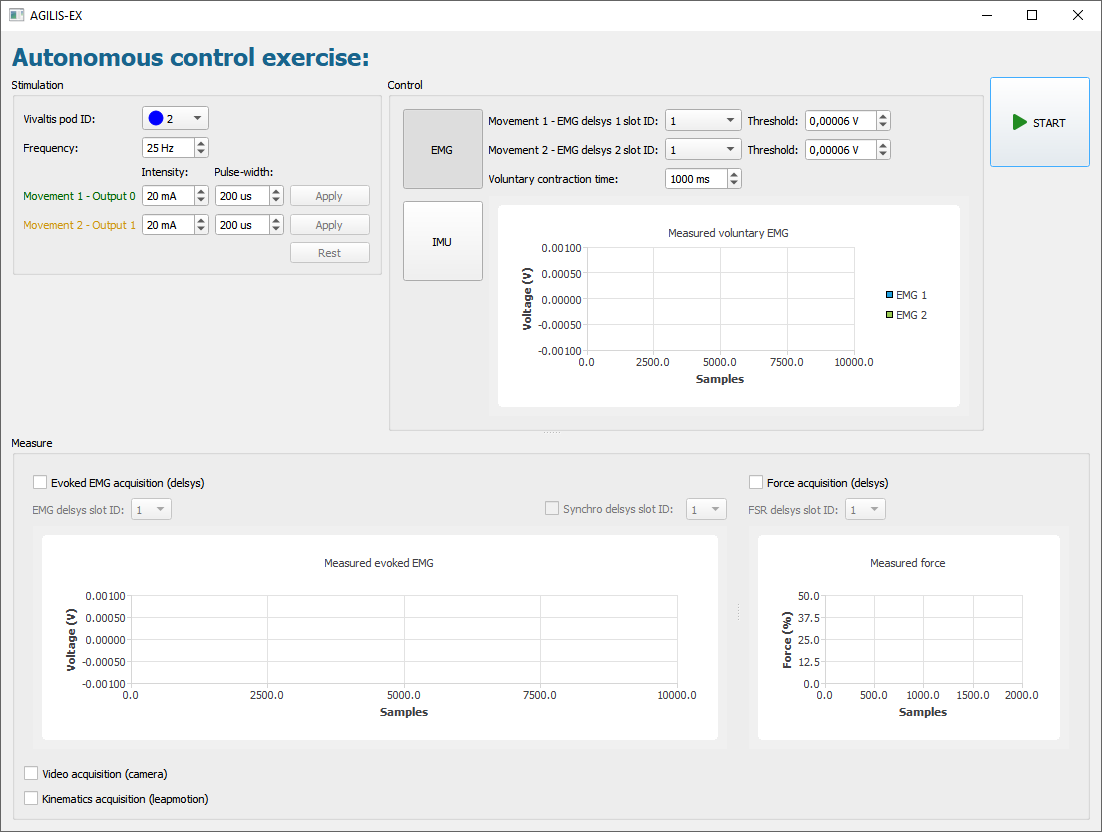
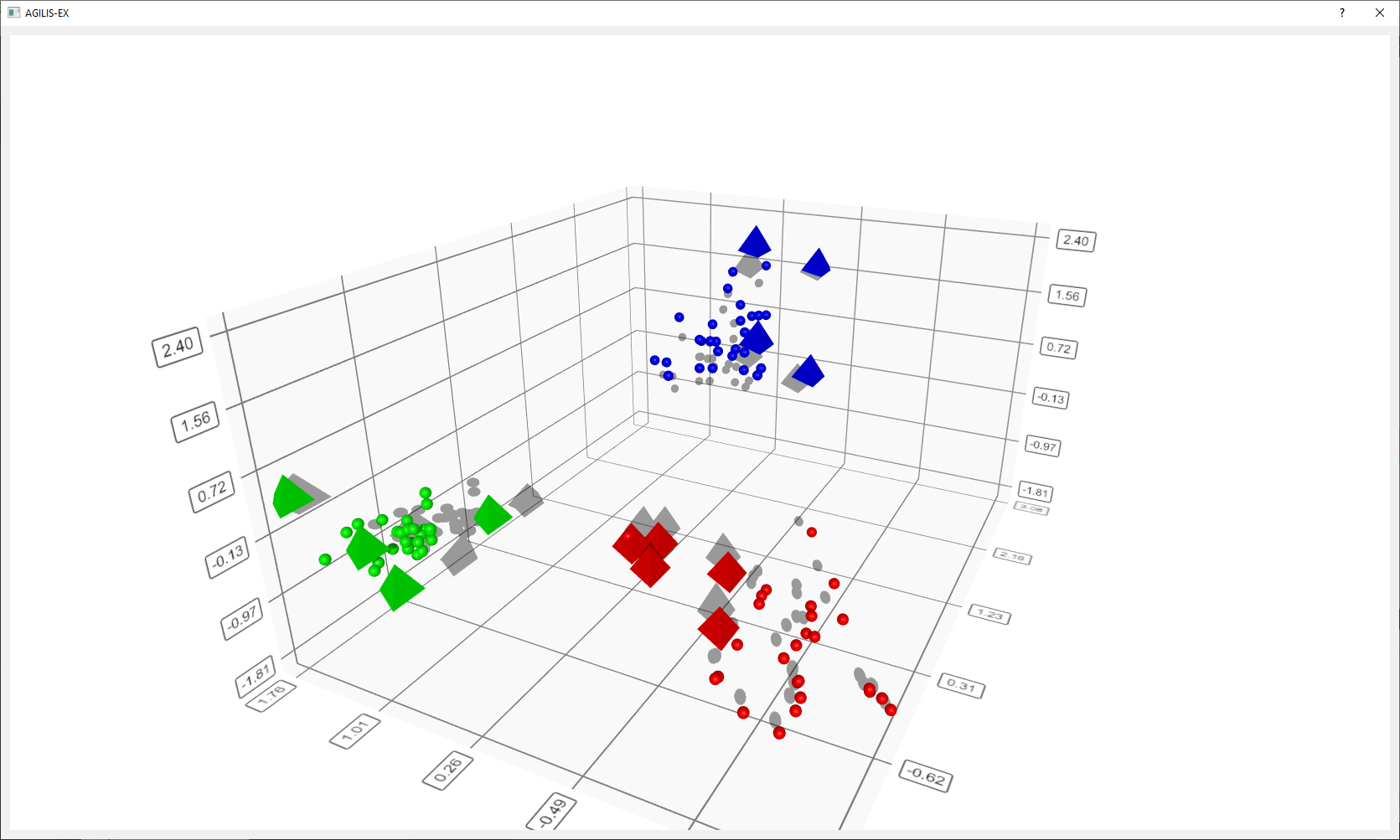
The AGILIS-EX software was specially developed as part of the AGILIS project for exploratory clinical trials governed by the ID RCB research protocol: 2019-A02037-50. It allows the configuration and triggering of the stimulation generated by the STIMEP (neural stimulator) or the VIVALTIS (external stimulator) (Fig.6). The stimulation parameters are automatically selected according to predefined configurations (frequency, current and pulse-width) in order to obtain the functional movements of the hand desired by the subject (Fig.7). To detect and interpret patient voluntary movement or contraction to infer the activation or deactivation of the pre-programmed stimulation, it uses measurements from the DELSYS acquisition system (EMG, FSR, trigger).This medical grade software is compliant with the IEC 62304 (class B).
8 New results
We have organized this section according to the two axes defined in our research program.
8.1 Exploration and understanding of the origins and control of movement
8.1.1 Electrophysiological mapping during brain tumor surgery: recording cortical potentials evoked locally, subcortically and remotely by electrical stimulation to assess the brain connectivity on-line
Participants: Anthony Boyer, Sofiane Ramdani, Hugues Duffau, Mélissa Dali, Marion A Vincent, Emmanuel Mandonnet, David Guiraud, François Bonnetblanc.
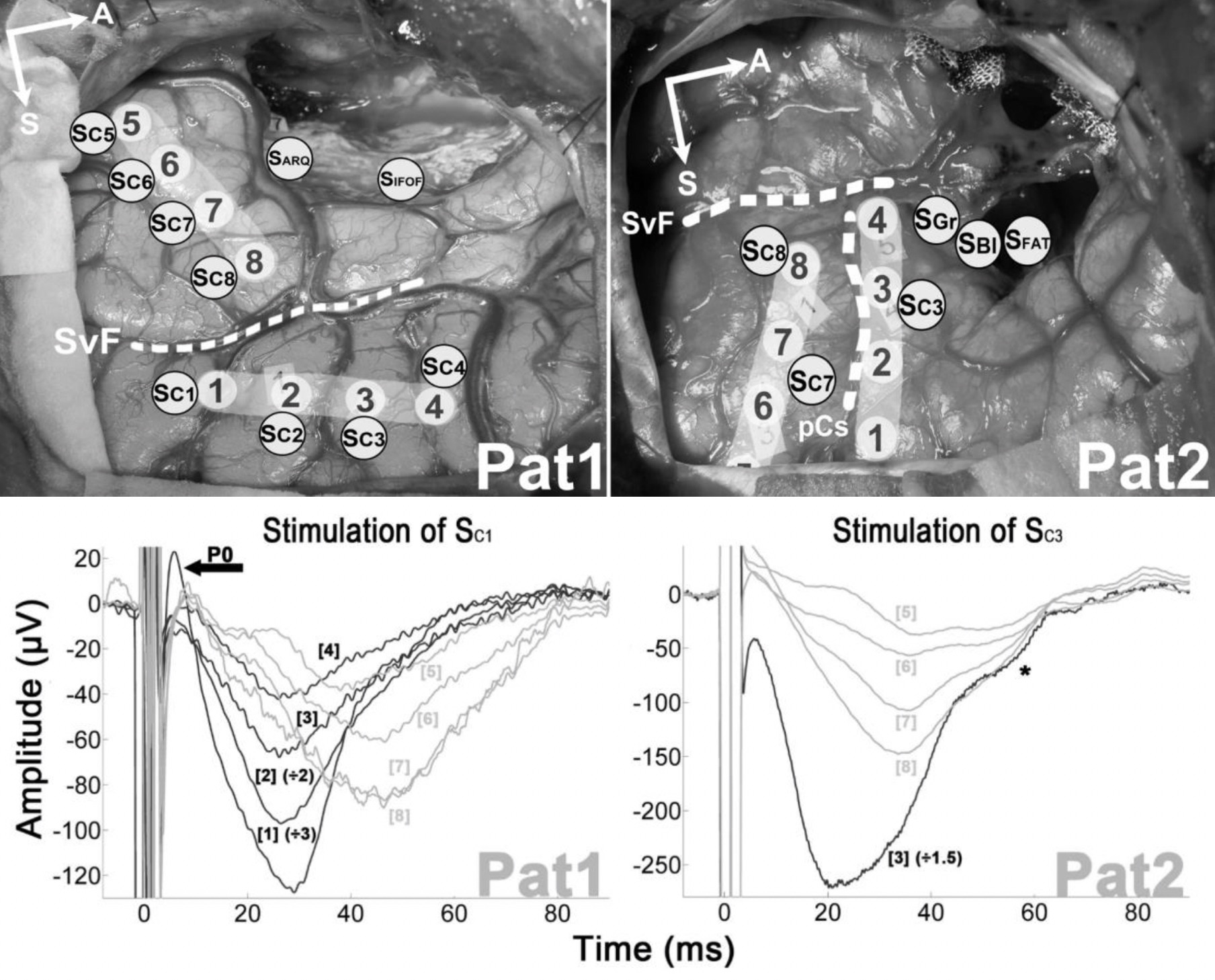
Direct electrical stimulation (DES) is used to perform functional brain mapping during awake surgery and in epileptic patients. DES may be coupled with the measurement of Evoked Potentials (EP) to study the conductive and integrative properties of activated neural ensembles and probe the spatiotemporal dynamics of short- and long-range networks. However, its electrophysiological effects remain by far unknown. We recorded ECoG signals on two patients undergoing awake brain surgery and measured EP on functional sites after cortical stimulations and were the firsts to record three different types of EP on the same patients. Using low-intensity (1-3 mA) to evoke electrogenesis we observed that: (i) "true" remote EPs are attenuated in amplitude and delayed in time due to the divergence of white matter pathways (fig.8) ; (ii) "false" remote EPs are attenuated but not delayed: as they originate from the same electrical source; (iii) Singular but reproducible positive components in the EP can be generated when the DES is applied in the temporal lobe or the premotor cortex; and (iv) rare EP can be triggered when the DES is applied subcortically: these can be either negative, or surprisingly, positive. We proposed different activation and electrophysiological propagation mechanisms following DES, based on the nature of activated neural elements and discussed important methodological pitfalls when measuring EP in the brain. Altogether, these results pave the way to map the connectivity in real-time between the DES and the recording sites; to characterize the local electrophysiological states and to link electrophysiology and function. In the future, and in practice, this technique could be used to perform electrophysiological mapping in order to link (non)-functional to electrophysiological responses with DES and could be used to guide the surgical act itself 13.
8.1.2 Variability and evolution of single fiber potentials of spastic muscles treated with botulinum toxin: JITTOX study
Participants: Hélène Moron, David Guiraud, Eva Berceron, Arnaud Dupeyron.
Introduction
The assessment of spasticity, essential in Physical Medicine and Rehabilitation, readily uses clinical scales, the objectivity and relevance of which are controversial. To date, there is no recommended paraclinical tool to evaluate it initially and after treatment with botulinum toxin type A (TBA); treatment whose clinical effect may wear off over time. The place of a test that abstracts from the subjective character thus seems crucial in this perspective: the single fiber approach is validated in the exploration of pathologies of the neuromuscular junction with the study of the "Jitter", witness of the membrane state and release of acetylcholine within the motor plate. The objective is to study the kinetics of this parameter within the muscle itself injected with TBA. Ultimately, it could make it possible to predict the response to this treatment clinically estimated by the MAS scale.
Material and Methods
Study of two groups of hemiplegic patients post-stroke, spastic on a flexor muscle of the forearm on the arm, three clinical and electrophysiological evaluations with Jitter measurement in pre-injection, at peak efficiency (4-6 weeks) and remotely (> 3 months):
- Patients without TBA: first injection
- Patients already injected with TBA: cumulative dose in a flexor muscle of the forearm on the arm> 400 IU
The subjects will be compared to a population of control subjects, volunteers, showing no pathology of MND, nor any nervous or muscular pathology and will be matched to subjects by age (+ / - 5 years and sex).
Activity report
- The first step was to carry out a narrative review of the literature on the contribution of single fiber in the evaluation of the effects of TBA: submission in progress to the journal Toxins. Abstract attached.
- After approval from the CPP, Jittox protocol started at the Nîmes University Hospital: Inclusion of 12/20 subjects. Witnesses will be included secondarily.
- The 3rd part consists in recording the raw data of the electrophysiological signal with the Biopac system in order to compare them with the data of the Neurosoft medical device. Our goal is to obtain data collection on the three visits of 5 patients. As it stands, we have two out of three records for a patient.
Abstract of the narrative review (submitted)
Botulinum toxin-A (BoNT-A) blocks acetylcholine release at the neuromuscular junction (NMJ) and is widely used for treatment of involuntary spasm, dystonic disorder and spasticity. However, its therapeutic effects are usually measured by clinical scales of questionable validity. Single-fiber electromyography (SFEMG) is a sensitive, validated diagnosing technique for NMJ impairment such as myasthenia. The Jitter parameter (µs) represents the variability of interpotential intervals of two muscle fibers from the same motor unit. This narrative review reports SFEMG use in BoNT-A treatment. Twenty-four articles were selected from 175 eligible articles searched in Medline / Pubmed and Cochrane Library from their creation until May 2020. The results showed that jitter is sensitive to early NMJ modifications following BoNT-A injection, with an increase at the early days' post-injection and a peak between Day 15 and 30, when symptoms diminish or disappear. The reappearance of symptoms accompanies a tendency for a decrease in jitter, but always precedes its normalization, either delayed or nonexistent. Increased jitter is observed in distant muscles from the injection site. No dose effect relationship was demonstrated. This review demonstrates that SFEMG could help physicians in their therapeutic evaluation according to the pathology considered. More data are needed to consider jitter as a predictor of BoNT-A clinical efficacy.
Keywords
botulinum toxin, single-fiber action potential, jitter, neuromuscular junction, electromyography.
Key contribution
SFEMG is an electromyographic technique which seems to be a sensitive tool for analyzing the NMJ modifications following BoNT-A injection by early increase of jitter in the muscle itself and / or at a distance. To date, no review has reported SFEMG use in BoNT-A treatment.
8.1.3 Modeling of the brain blood dynamics
Participants: Victor Vagné, David Guiraud, Vinccent Costalt, Emmanuelle Le Bars, Stéphane Perrey.
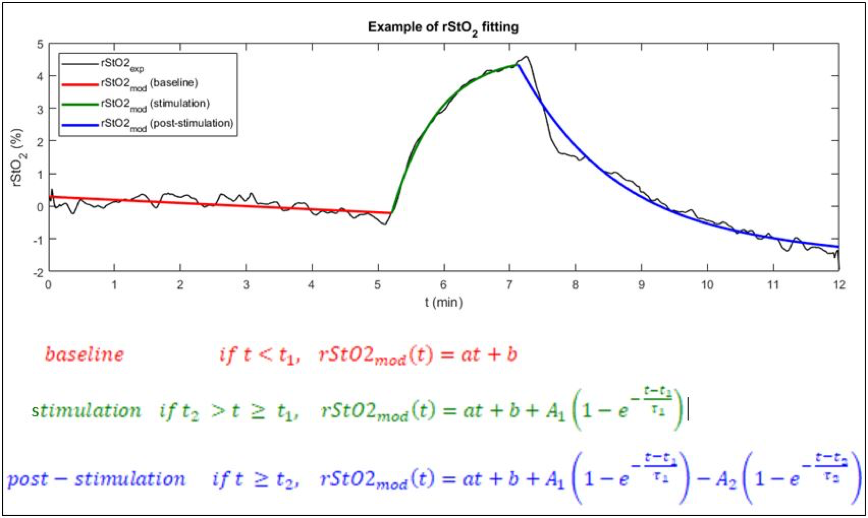
The work of this thesis consists in the establishment and evaluation of a NIRS-hypercapnic methodology which goal is to achieve the diagnosis of ischemic stroke during acute phase. First, an experimental protocol was defined to validate this methodology on healthy subjects. According to the general dynamics, the degree of detail of the response modeling is fixed by the data extracted from this protocol. With the objective of extracting quantitative parameters characterizing this response, we studied different identification models, with the equations that compose them and the parameters they provide. As part of the validation of these methods in clinical routine, we presented the results of these different models in a cohort of healthy subjects.
In more details, we defined a multiphase delayed first order models combined a linear detrending (fig.9). It leads to 8 parameters to be identified on each side of the brain NIRS response to the hypercapny stimulus. We show that the models fitting error is below the data acquisition resolution so that it can be considered as optimal. We further demonstrate that the response was balanced between left and right hemisphere in normal subject and that 4 parameters among the 8 were the most representative of the so called healthy brain 22. These 4 parameters should be identified on stroke patients the hypothesis being that they will differ significantly from impaired to normal side of the brain thus allowing a quick but safe diagnosis. This is the ongoing protocol that should be issued together with Ethics Committee approval.
8.1.4 Modelling hand dynamics under FES identification and simulation
Participants: Daniel Simon, Sandrine Gayrard.
Until pre-Agilis experiments it was only possible to observe visually the movements induced by the different configurations and to analyze some surface electromyographic (EMG) signals for simple observed motions. Estimating which muscles have been activated by a given electrical stimulation configuration remains challenging. For this purpose, we have developed a bio-mechanical and dynamic model intended to estimate the muscles involved in a given movement based on the observation of induced motions and contact forces.
Model of a hand under FES
The model is needed to ultimately provide an estimation of some bio-mechanical parameters of the hand and related muscles through the observation of motions and contact forces, therefore it must handle the dynamics of the bio-mechanical components. Furthermore, realistic simulations using this model are expected to provide a feedback both for the parameters estimates and for the identification process tuning. Therefore some modelling issues are designed to provide an executable model suited for numerical integration.
The main features of the model include :
- The kinematics handles 24 degrees of freedom (d.o.f.), namely 3 for the wrist, 5 for the thumb and 4 for each of the remaining fingers;
- The actuation uses 29 muscles, which are described using the dynamic model developed over years by the team. The 3 states of this model are the relative contraction, the force and the stiffness of the muscle. Muscles provide active forces when excited by FES and passive forces when stretched beyond their neutral length.
- 28 contact points are added to the model to simulate contacts between the hand and its environment. This will be used to simulate grasping objects such as a ball, a can and a chocolate tablet as planned in the Agilis protocol. When a contact occurs, the contact forces are computed assuming an elastic distorsion of the skin and a limited mixed Coulomb and viscous friction between the skin and the grasped solid object.
The model is currently implemented in C/C++ using Posix real-time threads under Linux (RTStim software in section 7)
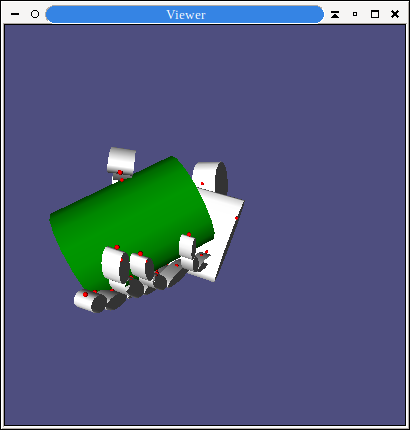
Open loop control where piece-wise constant FES currents are assumed to be sent for some muscles of interest allow for preliminary testing of simulated motions and forces. For example Figure 10 simulates the grasping of a can using the activation of the FDP and FDS (0.2 Imax), of the SU (0.5 Imax) and of the OPP (Imax). The red dots are the contact points.
Identification of muscles related to motions
Conversely with robotic hands where usually each degree of freedom is actuated by one dedicated actuator, the actuation tree of a human hand is both redundant and cross-coupled. Each degree of freedom is actuated by at least two agonist and antagonist muscles, but very often several muscles are involved in elementary motions of the joints. Therefore there is not a unique and simple mapping between the fingers movements and available actuators. A given motion of fingers may be provided by the activation of different subsets of stimulated muscles. Moreover it may happen that a given muscle provides unwanted motions for some joints while activated to move another joint in a desired direction. Hence, the generation of a desired motion for fingers, e.g. to provide grasping, needs a subtle combination of agonists/antagonists muscles contractions. Due to the complexity of the actuation chain, finding this combination by a trial and error process would be ineffective and a rationale process must be set up.
The first objective consists in finding one of several subsets of muscles to be activated in order to provide an elementary motion of one of several fingers. Secondly sequences of such elementary motions will be selected to provide a complex grasping or pinching movement. The problem can be stated as a constrained optimisation problem, where the constraints arise from the desired trajectory, from the bones kinematic, from the muscles parameters and from the actuation tree as depicted by the moment-arms. It is expected that various optimisation costs may lead to various activated muscles subsets for a desired motion or grasping action. The method was tested with a simplified model involving only the thumb. Various cost functions and constraints were implemented to identify what muscles needed to be activated to generate either a desired trajectory, or a desired contact force. The latter goal is compliant with the objective of Agilis and gave promising simulation results, to be confirmed by experiments.
8.2 Movement assistance and/or restoration
8.2.1 Grasping assistance in individuals with central nervous system disorders
CAMIN has an important research activity on grasping assistance. Different aspects are considered and some are presented here after.
User Control Interface based on Residual Muscle Contraction and Movement
Participants: Lucas Fonseca, Camilo Vaz, Luís Martins, Arthur Hiairrassary, Christine Azevedo.
Neurological disorders that affect upper limbs motor capabilities may have a tremendous impact on a patient quality of life. Although there are numerous proposed solutions for function restoration or replacement, the lack of upper limb control often limits the operation of such devices by the users. Control strategies that rely on residual movement or muscle activity are dependent on the individual, which usually has particular needs and abilities.
Review: State of the Art of algorithms in Intention Recognition for FES-assisted Grasping
Advancing the work currently in development in the team 25, we reviewed the state of the art in intent recognition using machine learning. The goal is to train machines to recognize intention based on data from the very same user it is intended for. We studied several artificial intelligence algorithms with different approaches and tested them against each other with data collected from healthy subjects.
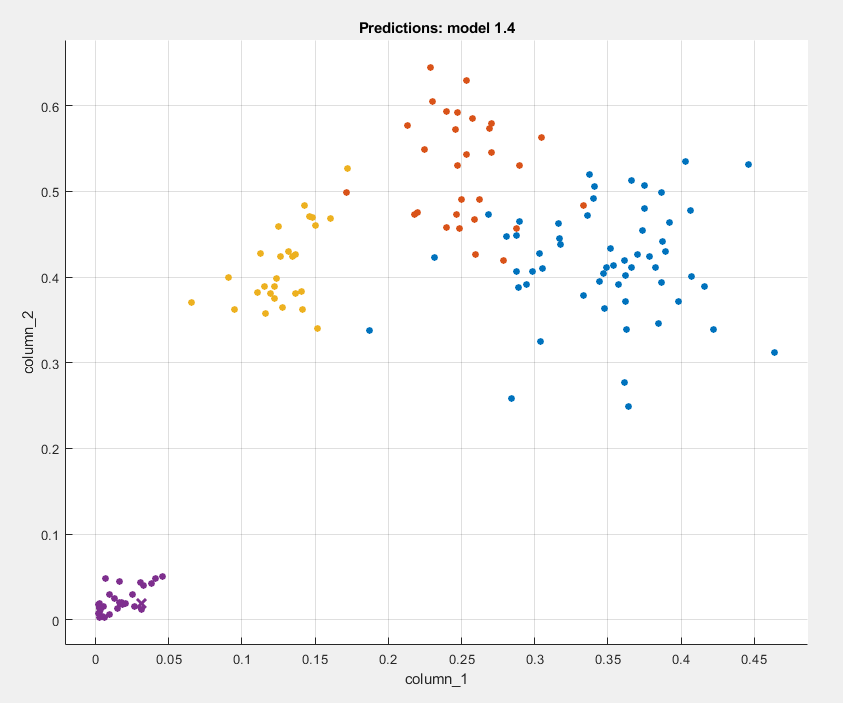
After approval from the COERLE (COERLE autorisation nº 2020-09 "AGILIS"), we collected shoulder movement data from healthy subjects with a wireless inertial measurement unit (IMU). The algorithms objective was to correctly classify different shoulder movements. Figure 11 shows the sensor positioning on the subject and Figure 12 shows the results of one of the algorithms analysis, where each color represents a different movement class.

We compiled a list of algorithms that resulted in good performances with this data, and went on to test one of them (Linear Support Vector Machine) in real time classification. We thus recruited more healthy subjects for two sessions. In the first one we collected data that was used for the system calibration and performed classification tests. In the second session, which took place at least one week after the first one, we tested the same system again, with and without recalibration.
Figure 13 shows the software screen during the calibration phase with one subject. Figure 14 shows the result of a real time classification test with one subject. Each color represent a different movement class. The results of these experiments are currently under analysis.

IMU and EMG based system for neuroprosthesis control
Although the great evolution in the methodologies of neuroprosthesis control around rehabilitation of patients with neurological disorders, these techniques still have some flaws that are preventing the entry of more assistive devices controlled by IMU or EMG signals on the market. Thus, we have been researching Machine Learning techniques and the State of the Art in IMU and EMG based control strategies of these assistive devices to understand which aspects of its control can be improved, particularly if used together.
Taking our initial research and previous works from the team into account 25, 26, we proposed a system divided in two modules with the objective of improving neuroprosthesis control based on the hybrid action of EMG and IMU signals, by increasing accuracy and making neuroprosthesis control more continuous and "user-friendly" for the user. These two modules will work in parallel with the goals of (1) decoding the patient's intention and classify the movement to be performed by the neuroprosthesis from EMG and IMU signals and (2) determining the level of force with which the movement should be performed.
Two complete quadriplegic participants were implanted with two cuff electrodes each (one around the median and one around the radial nerves) during one month in October and November within AGILIS protocol. The user control algorithms based on IMU and EMG described in this section have been deployed and tested. Result data is currently being analyzed.
Hybrid neuroprosthesis for rehabiliation in post-stroke hemiplegia
Participants: Lucas Fonseca, Fernanda Ferreira, Christine Azevedo.
In order to overcome some limitations of current neuroprostheses based solely on functional electrical stimulation, we have been researching hybrid solutions. Hybrid Robotic Rehabilitation Systems (HRRS) are innovative approaches to neurological rehabilitation that combine the advantages of muscle activation through Functional Electrical Stimulation (FES) with the repetitive muscle practice provided by Robot-Assisted Therapy (RT).
Systematic review on upper limb hybrid neuroprostheses for rehabilitation of neurological disorders
Previous studies indicate that hybrid systems may be more effective in improving motor control and functional skills compared to robotic therapy alone in patients with hemiparesis after chronic stroke and compared to traditional physical therapy in individuals with acute stroke. However, although studies prove the potential benefit of this technology, few randomized controlled trials have been conducted so far and no systematic literature review has been carried out. Systematic reviews are necessary because it is the most appropriate and current method for summarizing and synthesizing evidences about the effectiveness and effects of interventions.
Therefore, this project is investigating systematically the effects of HRRS on central injuries upper limb recovery based on each of the International Classification of Functioning, Disability and Health (ICF) domains. This study will contribute to the development of new hybrid neuroprostheses that are proven to be effective for upper limb rehabilitation.
This systematic review is currently underway with the participation of physicians, occupational therapists and engineers. It is registered in PROSPERO under protocol CRD42021227548 24.
User requirements for an upper limb hybrid neuroprosthesis
Technological innovations, such as the use of robotic therapy, neuroprostheses and the combination of these two technologies, called hybrid neuroprosthesis, have a positive impact on the daily life of people with disabilities, compensating for the loss of motor functions, helping to perform functional activities. However, there is a limited clinical application, with few devices currently available commercially, in addition to non-use, lack of adherence, and high rate of abandonment by users. One of the crucial reasons for this is related to the fact that most of these devices do not fully meet the needs and preferences of end-users due to low involvement of these very same users in the development process.
Therefore, in order to keep the user in the core of our research, one of the objectives of this project is to investigate the essential requirements (needs, preferences and expectations) of the potential users that need to be met during the development of upper limb hybrid neuroprosthesis, which will increase the device acceptance. For this, a multi-center study will be conducted with questionnaires, currently being built, applied in different countries to health professionals and patients with neurological disorders.
Exofinger: an orthotic solution to restore key-grip function in a user with tetraplegia
Participants: Clément Trotobas, Benoît Sijobert, Christine Azevedo, Christophe Braillon [SED Grenoble], Roger Pissard-Gibollet [SED Grenoble], Laurence Boissieux [SED Grenoble].
Researchers from the CAMIN team together with SED engineers participated into the Fabrikarium 2020 organized by My Human Kit1 and Ariane Group. Fabrikariul is a 3-day prototyping workshop dedicated to disabilities that brings together 9 people around a project holder with a disability2. INRIA DGDS supported financially our action. The EXOFINGER team aimed to develop a hand orthosis for the project holder with complete C6 tetraplegia. He is able to move his wrists in extension but does not have the use of his hands (his fingers are flexed spastic, except for the thumb). The project holder expressed the need to grasp objects in key grip. We decided to focus on the task of grasping a pen to sign a document. Before the event, we drafted the specifications and selected the other team members to ensure that we had diverse and complementary skills. Different modules were also prepared and tested. During the event, two EXOFINGER prototypes were produced (Figure 15). Both are cable driven and work on the same principle: when a button is activated, the control unit triggers the linear motor. The linear motor pulls or releases a cable connected to the thumb, closing the grasp. One of the prototypes is composed of a 3D printable part that is don like a ring on the 4 fingers where a small motor is placed; it pulls the cable up to a ring on the thumb. The other one is made of a custom made textile glove; the cable passes through a sheath and then through sleeves on the glove.
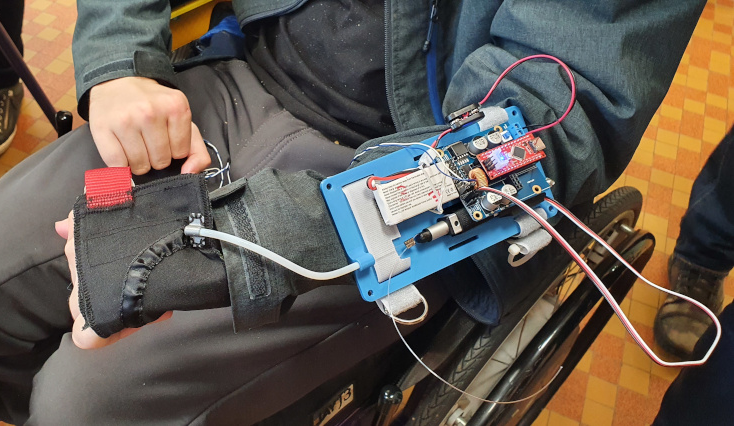
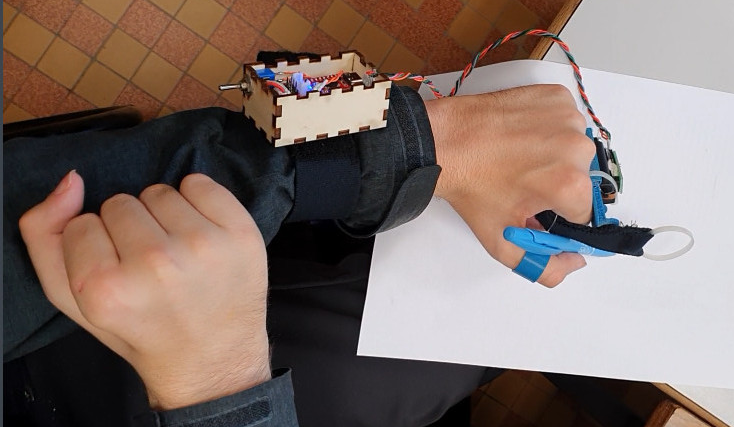
Although both prototypes have obvious drawbacks (lack of stroke, size...), both are functional and the project holder can don, use and dove himself. Thus he had the opportunity to choose between these two proofs of concept and it is the glove version that had been chosen (he is used to using propulsion gloves). A new version of this prototype is a work in progress in order to allow a daily use.
In addition, an open source documentation3 was written and continues to be updated to allow access to as many people as possible.
Selective implanted neural stimulation for the recovery of prehension in quadriplegic
Participants: Lucie William, Christine Azevedo, David Guiraud, Charles Fattal [USSAP Perpignan].
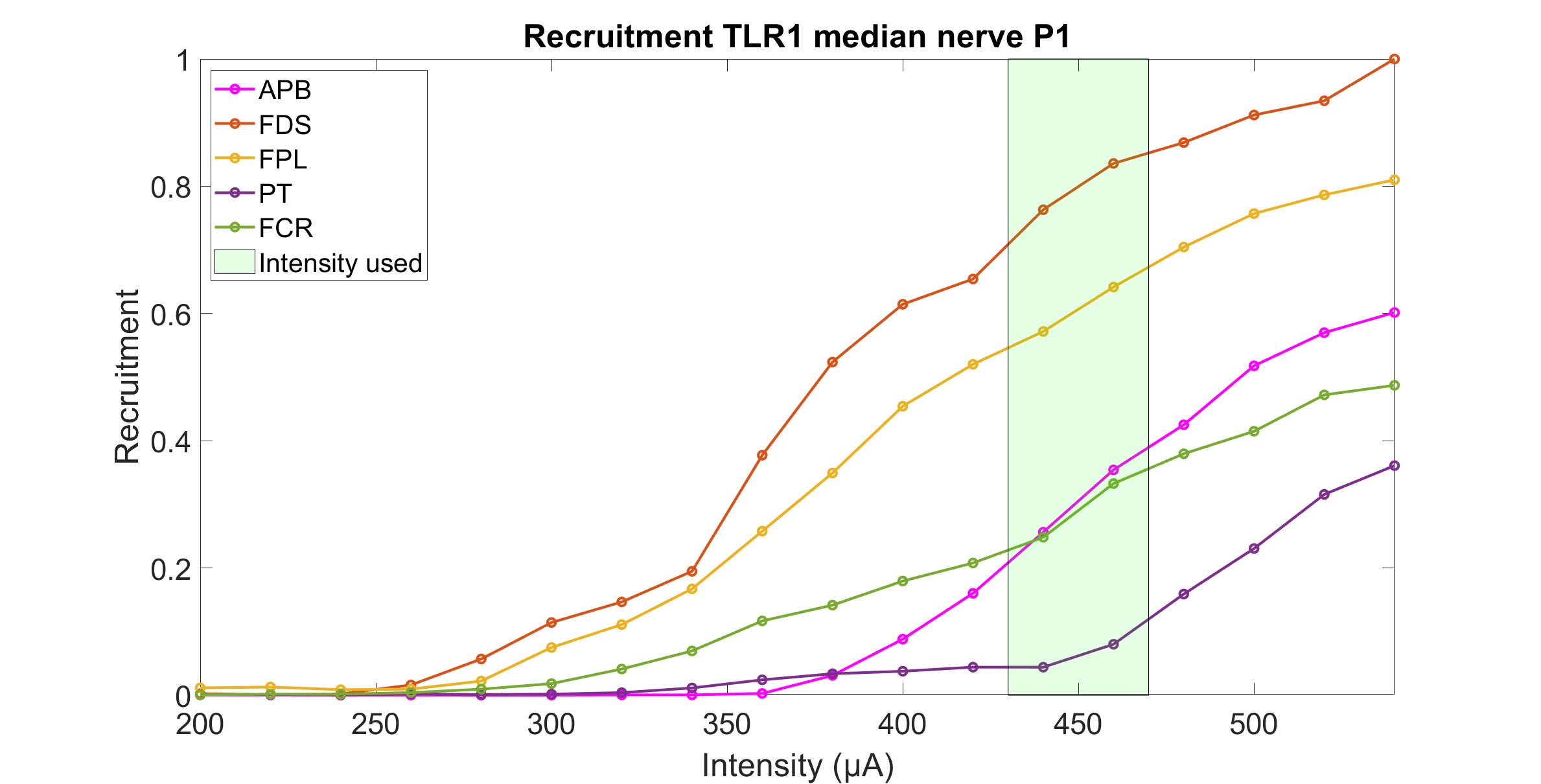
In the context of the AGILIS project, a clinical trial (#NCT03721861) was conducted on eight volunteers with complete quadriplegia. This clinical trial was performed during a scheduled surgery and under complete anaesthesia. The purpose was to study the ability of the neural stimulation with a cuff electrode and different configurations (distribution of the current) to produce a variety of movements. Results indicated that the stimulation of radial and median nerve can produce opening and closing of the hand and more precisely respectively extension and flexion of the wrist, fingers and thumb (21):
We hypothesised that a selective neural electrical stimulation of radial and median nerves enables the activation of functional movements in the paralysed hand of individuals with quadriplegia. Compared to previous approaches for which up to 12 muscles were targeted through individual muscular stimulations, we focused on minimising the number of implanted electrodes however providing almost all the needed and useful hand movements for subjects with complete quadriplegia.
We performed acute experiments during scheduled surgeries of the upper limb with eligible subjects. We scanned a set of multicontact neural stimulation cuff electrode configurations, pre-computed through modelling simulations. We reported the obtained isolated and functional movements that were considered useful for the subject (different grasping movement).
In eight subjects, we demonstrated that selective stimulation based on multicontact cuff electrodes and optimised current spreading over the active contacts provided isolated, compound, functional and strong movements; most importantly 3 out of 4 had isolated fingers or thumb flexion, one patient performed a Key Grip, another one the Power and Hook Grips, and the 2 last all the 3 Grips. Several configurations were needed to target different areas within the nerve to obtain all the envisioned movements. We further confirmed that the upper limb nerves have muscle specific fascicles, which makes it possible to activate isolated movements.
Ethics Committee / ANSM Approval: 2014 (inclusion period 2016-2018), CPP Sud Méditerranée, #ID-RCB:2014-A01752-45.
Still within the AGILIS project, two complete quadriplegic participants were implanted with two cuff electrodes (one around the median and one around the radial nerve) during one month in October in order to recover the prehension. The data are still under processing with for instance recruitment curve analysis from EMG recordings (Fig. 16).
8.2.2 Monitoring tremor in ecological conditions
Participants: Ronan Le Guillou, Esther Geruna, Christine Azevedo Coste, Christian Geny [CHU Montpellier].
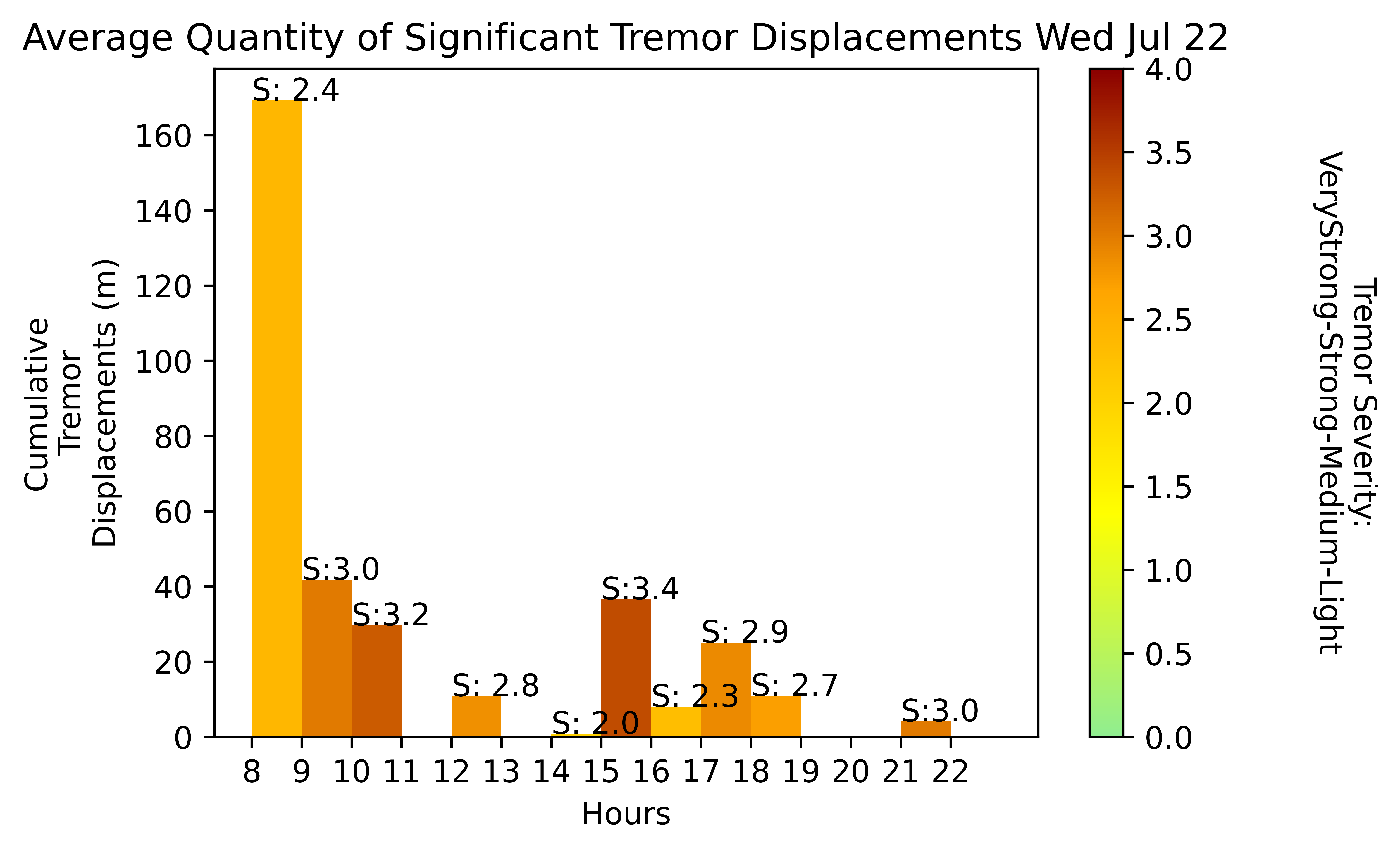
As part of a preliminary study on the effects of Mindfulness meditation on participants with Parkinson’s Disease (PD) (§X Partnerships and Cooperations : National Initiatives : LABEX NUMEV - MEDITAPARK ), an application was developed to monitor at home tremor occurrence using a smartwatch Samsung Gear S3 and its newer model, the Samsung Galaxy Watch (fig.5). A Python program has been developed to process and format the recorded data, extract specific features and present the characteristics of the Parkinson tremors under a user friendly and comprehensible format for clinicians. This was notably improved upon this year through an intership where the ease of use of the system, the automatisation of the recording process and the feature extraction capabilities from the inertial data were all implemented or improved compared to the previous version. The goal of this system being to identify Parkinson’s tremors characteristics qualitatively and quantitatively to highlight global tendencies and help objectively determine effectiveness of diverse treatments against PD tremors. This system was pre-tested on week long acquisitions with 3 volunteers subject to PD tremors of light, moderate and high severity and proved to be able to highlight tremor tendencies and characteristics in real conditions. These acquisitions were done in order to experimentally validate the inner-workings of the developed system in real conditions and its capacity to detect PD tremors of clinically relevant levels of severity as well as to refine the classification and processing of the data. A one day sample of acquisition is presented in a hourly format displaying the evaluation of the quantity of displacement generated by Parkinson tremors during each hour as well as the average severity estimation of the related tremors (fig.17). The created system allows the qualification of tremors in punctual clinical check-ups in the hospital as well as quantitative formatting of daily tendencies. This system should now allow to highlight the evolution of several characteristics from Parkinson’s tremors throughout the MBSR (Mind-fullness Based Stress Reduction) meditation program which is yet to be undertaken. A protocol is still waiting for validation from the CPP to begin inclusions and conduct the MBSR meditation program, monitored with the developed system. A software, PARa-Keet has been developped.
8.2.3 Assisted cycling
Participants: Martin Schmoll, Ronan Le Guillou, Charles Fattal [CRRF La Châtaigneraie], Christine Azevedo Coste, Bérengère Raoult [CRRF La Châtaigneraie].
Our team has been working for several years on FES-assisted cycling for individuals with spinal cord injury. We intend to improve cycling accessibility to a larger population in order to propose exercising and leisure activity to improve quality of life and self esteem. It has also been shown that FES-cycling of subjects with Spinal Cord njuries (SCI) results in physiological and psychological positive effects such as cardiovascular training, decrease in pressure sores occurrence and self-esteem improvements. However, the use of this technology has often remained restricted to indoor and stationary ergometers in clinical contexts, partly due to the small amount (10–25 W) of power produced and the requirement of experimented users to finely tune the stimulation patterns needed to stimulate lower limb. This year, we closely monitored the progress of the pilot included in the CYCLOSEF study who began training at home with FES in the beginning of October 2019 (fig.18). The participant was intended to take part in the Cybathlon 2020 Global Edition event in May 20204, however it was postponed in a televized format to November 2020 due to the global pandemic situation. Unfortunately we had to withdraw from the competition at the last minute since the sanitary conditions in France still didn't allow for us to participate. Despite the uncertainty throughout the year concerning the possibility to participate in the Cybathlon event, the study continued and the pilot trained at home during the confinement periods for a total of 12 months of training. Throughout the protocol's duration, the team provided clinical and technical support and supervision with weekly check-ups. Though the last phase of the study which was supposed to be focused on over ground cycling optimization could not be completed as intended since we were not anymore able to travel to the clinic for the training sessions, the pilot was motivated and continued training at home on an Ergometer. As part of this protocol, a performance evaluation was held in July 2020 where our pilot managed to pedal outdoors autonomously in an overground setting for more than 1600 meters, solely with the use of our IMUSEF system on an adapted recumbent tricycle (fig.19). The results of this study, are currently being analysed and will be published in comming months. Sofwtare and hardware development has been carried to set up a pedalling platform (i.e. IMUSEF software).


8.2.4 Detection of Apnea: a clinical trial
Participants: Xinyue Lu, David Guiraud, Christine Azevedo, Thomas Similowski [APHP Paris], Serge Renaux [NEURORESP Company].
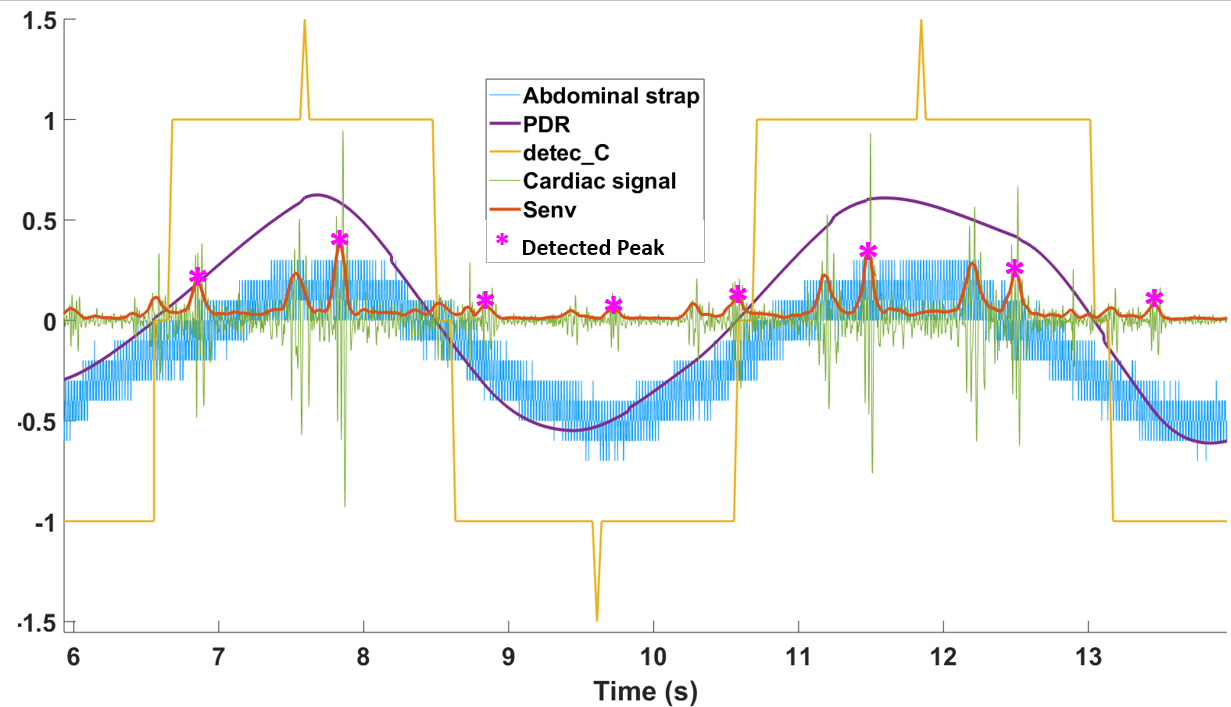
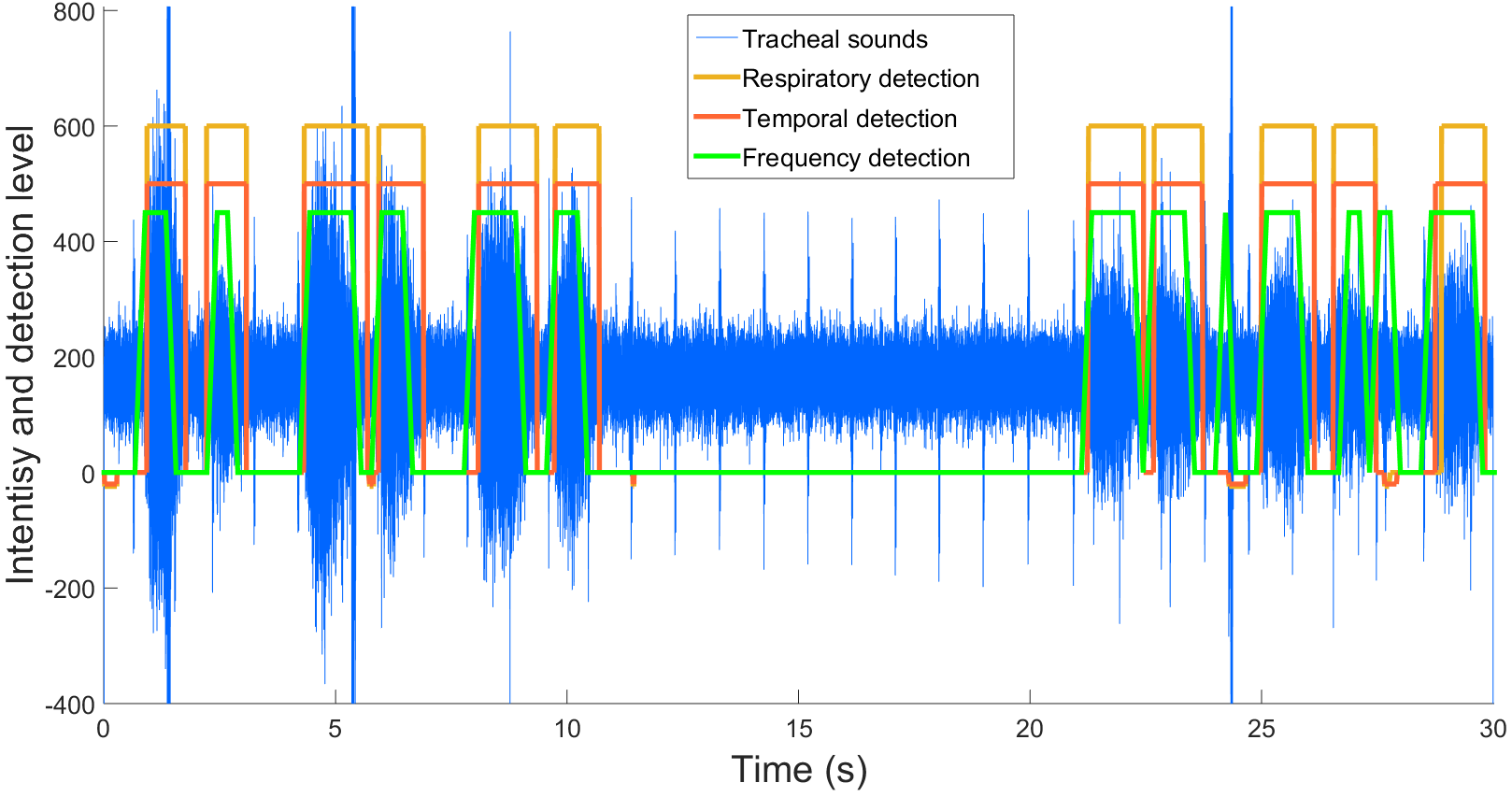
We made a proof of concept of Apnea detection and respiration phases classification using tracheal sound on healthy subjects 16. Our contribution was to combine time domain and frequency domain analysis to further increase the accuracy of the classification of respiration phases i.e. inspiration, expiration and occurence of apneas compared to state-of-the-art methods (fig.21). Moreover we proposed a new cardiac sounds analysis that showed to provide pieces of information about respiration. Indeed, the amplitude modulation of cardiac sounds gave useful insight of the respiration phases in particular when breathing sounds are very low with a low respiration pacing. We thus defined a new PDR processing (fig.20) validated against classical EDR derived from ECG analysis on healthy subjects. Besides, this year, after successful application to Ethics Committee, we further investigate the approach on 2 groups of patients: high level spinal cord injured patients (with tetraplegia and unable to breathe voluntarily), and patient with sleep apneas. The first trial was performed on 2 patients who were under phrenic stimulation to support their respiratory function. The second group of patients were undergoing a night of investigation through polysomnography at the hospital while we added 2 microphones for tracheal sound recordings.
8.3 Ongoing experimental protocols with human participants
Our activities are associated to an important working load on designing protocols and obtaining authorizations from ethical committees and/or health agencies. We list in the following the protocols that have obtained authorizations and were valid in 2019.
- AGILIS: Evaluation fonctionnelle de la restauration de la préhension chez le tétraplégique par stimulation neurale implantée. Essai clinique Phase Pilote DM RCB 2019-A02037-50. APHP (Paris), Clinique St Jean, USSAP Perpignan. ClinicalTrials NCT04306328
- Cyclosef : Entraînement de personnes lésées médullaires au pédalage d’un vélo tricycle assisté par stimulation électrique des muscles sous lésionnels: étude de cas. CPP ID-RCB:2019-A00808-49. CRF La Châtaigneraie.
- E-PREHENSTROKE - Evaluation of optimal piloting modalities and their impact on the grasping capacity in Functional Electrical Stimulation of Finger Extensor Muscles in the Hemiplegic Patient in Chronic Phase - Protocol RCB 2018-A02144-51. CHU Nîmes, CHU Toulouse.
- BREATHLOOP - Recording tracheal sounds for the purpose of developing a breath control algorithm - Protocol RCB 2019-A01813-54. ADOREPS
- Variability and evolution of the single fiber potentials of a spastic muscle treated with botulinum toxin - Protocol RCB 2019-A01863-52A. CHU Nîmes
- Pilot study: measurement of evoked potentials in electroencephalography and electrocorticography by electrical stimulation of the brain during awake neuro-surgery of low-grade infiltrating gliomas - Protocol RCB 2014-A00056-43. CHU Montpellier
- MEDITAPARK: Étude pilote de l’évaluation par monitoring ambulatoire d'un programme de méditation en pleine conscience sur le tremblement parkinsonien. ID-RCB: 2020-A01927-32. CHU Montpellier
- AGILIS-ML: Development of user control interface based on residual movement for upper limb neuroprostheses in the context of the AGILIS project. The protocol includes experiments with able body subjects and has the approval of COERLE (autorisation nº 2020-09 AGILIS).
- Upper limb hybrid robotic rehabilitation effectiveness aiming at compiling existing knowledge on the use of hybrid robotic devices on the rehabilitation of neurological disorders affecting upper limbs. The systematic review is registered in PROSPERO (protocol CRD42021227548). 24
9 Bilateral contracts and grants with industry
NEURINNOV startup finances half of the PhD thesis salary of Lucie William.
10 Partnerships and cooperations
10.1 International initiatives
10.1.1 Inria associate team not involved in an IIL
- Title: CACAO
- Duration: 2019 - 2022
- Coordinator: Christine Azevedo Coste
-
Partners:
- NTAAI, UNB (Brazil)
- UFMG (Brazil)
- Inria contact: Christine Azevedo Coste
- Summary: The CACAO5 team has developed an expertise in the application of electrical stimulation for assisting seat-to-seat transfers and pedaling for people with paraplegia. The team shared a unique experience in 2016 by participating in the first Cybathlon techno-sports games with a Brazilian driver and a French driver in the assisted bicycle race. The team wishes to continue the work by optimizing the quality of pedaling to participate in the Cybathlon 2020 and extending the technique for the rehabilitation of patients with hemiplegia in a rehabilitation context.
10.1.2 Inria international partners
Informal international partners
Andrew Murray from Dayton Univ. USA, co-supervises Clément Trotobas PhD Thesis.
10.2 European initiatives
10.2.1 FP7 & H2020 Projects
H2020-MSCA-IF-2019. Lucas Fonseca has obtained a Marie Curie Grant for his project: "Neuroprosthesis user interface based on residual motor skills and muscle activity in persons with upper limb disabilities".
10.2.2 Collaborations in European programs, except FP7 and H2020
CAMIN team is leader of a EIT Health project "AGILIS" on Grasping rehabilitation in individuals with quadriplegia6.
10.3 National initiatives
-
Inria ADT STIMBIO
Participants : Christine Azevedo, Daniel Simon, Ronan Le Guillou, Benoît Sijobert.
A 1-year engineer (R. Le Guillou) was funded by Inria ADT on the development of an architecture dedicated to FES-cycling platform.
-
EDF Foundation - CYCLOSEF project
Collaboration with La Châtaigneraie Hospital on FES-assisted cycling. Financial support for a study on FES-cycling training method and performance otimization on individuals with complete spinal cord injury.
- ANR Grasp-It (2019-2023) - Leader LORIA, Nancy.
10.4 Regional initiatives
-
I-SITE MUSE COMPANIES AND CAMPUS grant - SPINSTIM project
Collaboration with academic local partners (CHU, IES) and NEURINNOV company on the spinal stimulation for bladder and bowel functions restoration. This is linked to an ongoing collaboration with Oslo University (Norway).
- LABEX NUMEV - MEDITAPARK project Collaboration with Montpellier Hospital (Neurology service) and the Montpellier Mindfulness Center to analyze the impact of meditation on upper limb tremor.
11 Dissemination
11.1 Promoting scientific activities
11.1.1 Scientific events: organisation
CAMIN team organized a Webinar on EIT Health AGILIS project on January 25th 2021 together with the other partners from the consortium. 60 invited persons participated.
11.1.2 Scientific events: selection
Chair of conference program committees
- David Guiraud is Editor of Theme 6 "Rehabilitation Engineering" at IEEE EMBC conference
11.1.3 Journal
CAMIN team members reviewed various articles for different international journals (IEEE TNSRE, SENSORS, ...).
Member of the editorial boards
- David Guiraud is associate Editor at Journal of Neural Engineering
- David Guiraud is associate Editor at Medical and Biological Engineering and Computing
- Christine Azevedo is Review Editor Frontiers Neuroscience - Neuroprosthetics
- Christine Azevedo represents Inria in the ERCIM News Journal editorial Board
11.1.4 Leadership within the scientific community
- Christine Azevedo is member of IFESS society board.
11.1.5 Research administration
- Christine Azevedo is a member of COERLE (Inria Commité d'éthique)
- Christine Azevedo is a member of NICE committee, a subgroup of Sophia teamp projects committee (CEP) 7
11.2 Teaching - Supervision - Juries
11.2.1 Teaching
- Master Neuroprothèses : Daniel Simon, "Control basics", 6.5h, M2, Université de Montpellier, France
- Master Neuroprothèses : François Bonnetblanc, "Neurophysiologie", 8h, M2, Université de Montpellier, France
11.2.2 Supervision
- PhD in progress : Lucie William, "Selective implanted neural stimulation to recover the prehension for quadriplegic", University of Montpellier-Inria-NEURINNOV, october 2019-september 2022, supervised by David Guiraud and Christine Azevedo
- PhD in progress : Hélène Moron, MD, "Jitter of MUAP measured through needle EMG used as a biomearker of the Botulin toxin effect", University of Montpellier-Inria, october 2019-september 2022, supervised by David Guiraud and Arnaud Dupeyron.
- PhD in progress : Clément Trotobas, "Design of arm assistive technologies", University of Montpellier-Inria-Dayton University, september 2020-september 2023, supervised by Christine Azevedo and Andrew Murray (Dayton Univ)
- PhD in progress : Ronan LeGuillou, "Design of a wearable neuroprosthetic solution for arm rehabilitation in post-stroke hemiplegia", University of Montpellier-Inria-CHU Toulouse, December 2020-December 2023, supervised by Christine Azevedo and David Gasq (CHU Toulouse)
11.3 Popularization
11.3.1 Interventions
Christine Azevedo was mentor of a project in a school were she followed up a research projet about navigation assistance of children with visually impairment8. The project was granted the St Pierre Foundation innovation prize (Idea Category) in december 2020. 14 sessions of an average of 4 hours were organized.
Christine Azevedo accompanied a middle school class over the first lockdown period from April to June on a series of programming challenges on SCRATCH language.
12 Scientific production
12.1 Major publications
- 1 article Electrophysiological Mapping During Brain Tumor Surgery: Recording Cortical Potentials Evoked Locally, Subcortically and Remotely by Electrical Stimulation to Assess the Brain Connectivity On-line Brain Topography: a Journal of Cerebral Function and Dynamics 2020
- 2 articleTraining with FES-assisted cycling in a subject with spinal cord injury: Psychological, physical and physiological considerationsJournal of Spinal Cord MedicineJuly 2018, 1-12
- 3 articleImpact of direct epispinal stimulation on bladder and bowel functions in pigs: A feasibility studyNeurourology and Urodynamics371January 2018, 138-147
- 4 articleSensory feedback restoration in leg amputees improves walking speed, metabolic cost and phantom painNature Medicine259September 2019, 1356-1363
- 5 article Enhancing functional abilities and cognitive integration of the lower limb prosthesis Science Translational Medicine 11 512 October 2019
- 6 articleA phantom axon setup for validating models of action potential recordingsMedical and Biological Engineering and Computing1042016, 671-678
- 7 articleSelective neural electrical stimulation restores hand and forearm movements in individuals with complete tetraplegiaJournal of NeuroEngineering and Rehabilitation171May 2020, 66-78
- 8 articleA novel EMG interface for individuals with tetraplegia to pilot robot hand graspingIEEE Transactions on Neural Systems and Rehabilitation Engineering2622018, 291-298
- 9 articleModel-Based Design and Experimental Validation of Control Modules for Neuromodulation DevicesIEEE Transactions on Biomedical Engineering637June 2016, 1551-1558
- 10 articleCase report: remote neuromodulation with direct electrical stimulation of the brain, as evidenced by intra-operative EEG recordings during wide-awake neurosurgeryClinical NeurophysiologyLetter to the editorNovember 2015, 1752-1754
12.2 Publications of the year
International journals
Reports & preprints
Other scientific publications
12.3 Cited publications
- 25 articleAssisted Grasping in Individuals with Tetraplegia: Improving Control through Residual Muscle Contraction and MovementSensors1920October 2019, #4532
- 26 articleA novel EMG interface for individuals with tetraplegia to pilot robot hand graspingIEEE Transactions on Neural Systems and Rehabilitation Engineering2622018, 291-298