
Keywords
Computer Science and Digital Science
- A1. Architectures, systems and networks
- A1.2. Networks
- A1.2.6. Sensor networks
- A1.2.7. Cyber-physical systems
- A1.2.9. Social Networks
- A1.5. Complex systems
- A3. Data and knowledge
- A3.1. Data
- A6. Modeling, simulation and control
- A6.1. Methods in mathematical modeling
- A6.2. Scientific computing, Numerical Analysis & Optimization
- A6.4. Automatic control
Other Research Topics and Application Domains
- B7. Transport and logistics
- B7.1. Traffic management
- B7.2. Smart travel
1 Team members, visitors, external collaborators
Research Scientists
- Carlos Canudas de Wit [Team leader, CNRS, Senior Researcher]
- Maria-Laura Delle Monache [Inria, Researcher]
- Paolo Frasca [CNRS, Researcher]
- Federica Garin [Inria, Researcher]
Faculty Members
- Hassen Fourati [Univ Grenoble Alpes, Associate Professor]
- Alain Kibangou [Univ Grenoble Alpes, Associate Professor]
Post-Doctoral Fellow
- Fadoua Taia-Alaoui [Univ Grenoble Alpes]
PhD Students
- Maria Castaldo [CNRS]
- Tarso Kraemer Sarzi Sartori [UGA]
- Muhammad Umar B Niazi [CNRS]
- Denis Nikitin [CNRS]
- Bassel Othman [IFPEN]
- Ujjwal Pratap [CNRS]
- Martin Rodriguez [CNRS]
- Nigina Toktassynova [KazNRTU]
- Liudmila Tumash [CNRS]
- Renato Vizuete Haro [Univ Paris-Saclay]
- Makia Zmitri [CNRS]
Technical Staff
- Vadim Bertrand [CNRS, Engineer]
Interns and Apprentices
- Gwen Adolphe [CNRS, from May 2020 until Jul 2020]
- Xavier Dambricourt [CNRS, from Feb 2020 until Mar 2020]
- Dhannai Sepulveda Gonzalez [Inria, until Apr 2020]
Administrative Assistant
- Myriam Etienne [Inria]
External Collaborator
- Stéphane Mollier [CNRS, until Jan 2020]
2 Overall objectives
2.1 Context and overall goal of the project
NeCS is a joint Inria/Gipsa-Lab team, bi-located at the Inria-Rhône-Alpes Center in Montbonnot and at Gipsa-Lab (http://
The research field of Networked Controlled Systems deals with feedback systems controlled over networks, but also concerns systems that naturally exhibit a network structure (e.g., traffic, electrical networks, etc.).
The first system category results from the arrival of new control problems posed by the consideration of several factors, such as: new technological components (e.g., wireless, RF, communications, local networks, etc.), increase of systems complexity (e.g., increase in vehicle components), the distributed location of sensor and actuator, and computation constraints imposed by their embedded nature. In this class of systems, the way that the information is transferred and processed (information constraints), and the manner in which the computation resources are used (resources management), have a substantial impact in the resulting stability and performance properties of the feedback controlled systems. One main challenge here is the co-design of control together with one or more other components of different nature. The NeCS team has tackled co-design problems concerning:
- Control under communications and network constraints;
- Control under resources constraints.
The second category of systems is motivated by the natural network structure in which the original systems are built. Examples are biologic networks, traffic networks, and electrical networks. The complex nature of such systems makes the classical centralized view of the control design obsolete. New distributed and/or collaborative control and estimation algorithms need to be devised as a response to this complexity. Even if the dynamic behavior of each individual system is still important, the aggregated behavior (at some macroscopic level), and its interconnection graph properties become of dominant importance. To build up this research domain, the team has put a strong focus on traffic (vehicular) networks, and in some associated research topics capturing problems that are specific to these complex network systems (distributed estimation, graph-discovering, etc).
3 Research program
3.1 Introduction
NeCS team deals with Networked Control Systems. Since its foundation in 2007, the team has been addressing issues of control under imperfections and constraints deriving from the network (limited computation resources of the embedded systems, delays and errors due to communication, limited energy resources), proposing co-design strategies. The team has recently moved its focus towards general problems on control of network systems, which involve the analysis and control of dynamical systems with a network structure or whose operation is supported by networks. This is a research domain with substantial growth and is now recognized as a priority sector by the IEEE Control Systems Society: IEEE has started a new journal, IEEE Transactions on Control of Network Systems, whose first issue appeared in 2014.
More in detail, the research program of NeCS team is along lines described in the following sections.
3.2 Distributed estimation and data fusion in network systems
This research topic concerns distributed data combination from multiple sources (sensors) and related information fusion, to achieve more specific inference than could be achieved by using a single source (sensor). It plays an essential role in many networked applications, such as communication, networked control, monitoring, navigation and surveillance. Distributed estimation has already been considered in the team. We wish to capitalize and strengthen these activities by focusing on integration of heterogeneous, multidimensional, and large data sets:
- Heterogeneity and large data sets. This issue constitutes a clearly identified challenge for the future. Indeed, heterogeneity comes from the fact that data are given in many forms, refer to different scales, and carry different information. Therefore, data fusion and integration will be achieved by developing new multi-perception mathematical models that can allow tracking continuous (macroscopic) and discrete (microscopic) dynamics under a unified framework while making different scales interact with each other. More precisely, many scales are considered at the same time, and they evolve following a unique fully-integrated dynamics generated by the interactions of the scales. The new multi-perception models will be integrated to forecast, estimate and broadcast useful system states in a distributed way. Targeted applications include traffic networks and navigation.
- Multidimensionality. This issue concerns the analysis and the processing of multidimensional data, organized in multiway array, in a distributed way. Robustness of previously-developed algorithms will be studied. In particular, the issue of missing data will be taken into account. In addition, since the considered multidimensional data are generated by dynamic systems, dynamic analysis of multiway array (or tensors) will be considered. The targeted applications concern distributed detection in complex networks and distributed signal processing for collaborative networks. This topic is developed in strong collaboration with UFC (Brazil).
3.3 Network systems and graph analysis
This is a research topic at the boundaries between graph theory and dynamical systems theory.
A first main line of research will be to study complex systems whose interactions are modeled with graphs, and to unveil the effect of the graph topology on system-theoretic properties such as observability or controllability. In particular, on-going work concerns observability of graph-based systems: after preliminary results concerning consensus systems over distance-regular graphs, the aim is to extend results to more general networks. A special focus will be on the notion of `generic properties', namely properties which depend only on the underlying graph describing the sparsity pattern, and hold true almost surely with a random choice of the non-zero coefficients. Further work will be to explore situations in which there is the need for new notions different from the classical observability or controllability. For example, in opinion-forming in social networks or in formation of birds flocks, the potential leader might have a goal different from classical controllability. On the one hand, his goal might be much less ambitious than the classical one of driving the system to any possible state (e.g., he might want to drive everybody near its own opinion, only, and not to any combination of different individual opinions), and on the other hand he might have much weaker tools to construct his control input (e.g., he might not know the whole system's dynamics, but only some local partial information). Another example is the question of detectability of an unknown input under the assumption that such an input has a sparsity constraint, a question arising from the fact that a cyber-physical attack might be modeled as an input aiming at controlling the system's state, and that limitations in the capabilities of the attacker might be modeled as a sparsity constraint on the input.
A second line of research will concern graph discovery, namely algorithms aiming at reconstructing some properties of the graph (such as the number of vertices, the diameter, the degree distribution, or spectral properties such as the eigenvalues of the graph Laplacian), using some measurements of quantities related to a dynamical system associated with the graph. It will be particularly challenging to consider directed graphs, and to impose that the algorithm is anonymous, i.e., that it does not makes use of labels identifying the different agents associated with vertices.
3.4 Collaborative and distributed network control
This research line deals with the problem of designing controllers with a limited use of the network information (i.e. with restricted feedback), and with the aim to reach a pre-specified global behavior. This is in contrast to centralized controllers that use the whole system information and compute the control law at some central node. Collaborative control has already been explored in the team in connection with the underwater robot fleet, and to some extent with the source seeking problem. It remains however a certain number of challenging problems that the team wishes to address:
- Design of control with limited information, able to lead to desired global behaviors. Here the graph structure is imposed by the problem, and we aim to design the “best” possible control under such a graph constraint 1. The team would like to explore further this research line, targeting a better understanding of possible metrics to be used as a target for optimal control design. In particular, and in connection with the traffic application, the long-standing open problem of ramp metering control under minimum information will be addressed.
- Clustering control for large networks. For large and complex systems composed of several sub-networks, feedback design is usually treated at the sub-network level, and most of the times without taking into account natural interconnections between sub-networks. The team is exploring new control strategies, exploiting the emergent behaviors resulting from new interconnections between the network components. This requires first to build network models operating in aggregated clusters, and then to re-formulate problems where the control can be designed using the cluster boundaries rather than individual control loops inside of each network. Examples can be found in the transportation application domain, where a significant challenge will be to obtain dynamic partitioning and clustering of heterogeneous networks in homogeneous sub-networks, and then to control the perimeter flows of the clusters to optimize the network operation. This topic is at the core of the Advanced ERC project Scale-FreeBack.
3.5 Transportation networks
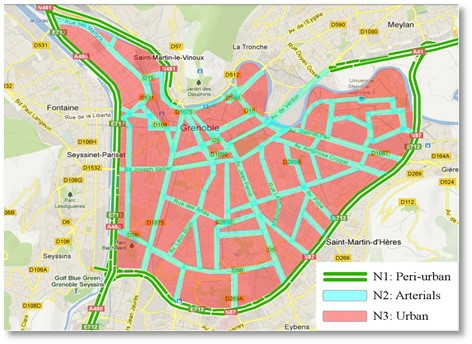
This is currently the main application domain of the NeCS team. Several interesting problems in this area capture many of the generic networks problems identified before (e.g., decentralized/collaborative traffic optimal control, density balancing using consensus concepts, data fusion, distributed estimation, etc.). Several specific actions have been continued/launched to this purpose: improvement and finalization of the Grenoble Traffic Lab (GTL), EU projects (SPEEDD, ERC-AdG Scale-FreeBack). Further research goals are envisioned, such as:
- Modeling of large scale traffic systems. We aim at reducing the complexity of traffic systems modeling by engaging novel modeling techniques that make use of clustering for traffic networks while relying on its specific characteristics. Traffic networks will be aggregate into clusters and the main traffic quantities will be extrapolated by making use of this aggregation. Moreover, we are developing an extension of the Grenoble Traffic Lab (GTL) for downtown Grenoble which will make use of GPS and probe data to collect traffic data in the city center.
- Modeling and control of intelligent transportation systems. We aim at developing a complete micro-macro modeling approach to describe and model the new traffic dynamics that is developing thanks to mixed (simple, connected and automated) vehicles in the roads. This will require cutting edge mathematical theory and field experiments.
4 Application domains
4.1 A large variety of application domains
Sensor and actuator networks are ubiquitous in modern world, thanks to the advent of cheap small devices endowed with communication and computation capabilities. Potential application domains for research in networked control and in distributed estimation are extremely various, and include the following examples.
- Intelligent buildings, where sensor information on concentration, temperature, room occupancy, etc. can be used to control the heating, ventilation and air conditioning (HVAC) system under multi-objective considerations of comfort, air quality, and energy consumption.
- Smart grids: the operation of electrical networks is changing from a centralized optimization framework towards more distributed and adaptive protocols, due to the high number of small local energy producers (e.g., solar panels on house roofs) that now interact with the classic large power-plants.
- Disaster relief operations, where data collected by sensor networks can be used to guide the actions of human operators and/or to operate automated rescue equipment.
- Inertial navigation, where sensor information can be used to locate the pedestrians to accomplish his mission.
- Environmental monitoring and exploration using self-organized fleets of Autonomous Underwater Vehicles (AUVs), collaborating in order to reach a goal such as finding a pollutant source or tracing a seabed map.
- Infrastructure security and protection using smart camera networks, where the images collected are shared among the cameras and used to control the cameras themselves (pan-tilt-zoom) and ensure tracking of potential threats.
- Collaborative indoor and outdoor navigation of pedestrians.
- Transportation mode classification and detection based on inertial and pressure sensors.
In particular, NeCS team is currently focusing in the areas described in detail below.
4.2 Intelligent transportation systems
Throughout the world, roadways are notorious for their congestion, from dense urban network to large freeway systems. This situation tends to get worse over time due to the continuous increase of
transportation demand whereas public investments are decreasing and space is lacking to build new infrastructures. The most obvious impact of traffic congestion for citizens is the increase of travel
times and fuel consumption. Another critical effect is that infrastructures are not operated at their capacity during congestion, implying that fewer vehicles are served than the amount they were designed for. Using macroscopic fluid-like models, the NeCS team has initiated new researches to develop innovative traffic management policies able to improve the infrastructure operations.
The research activity is on two main challenges: (1) modeling and forecasting, so as to provide accurate information to users, e.g., travel times; and (2) control, via ramp-metering and/or variable speed limits.
The Grenoble Traffic Lab (see http://
4.3 Inertial navigation
The team is exploring techniques and approaches from estimation, filtering and machine learning, in order to use inertial sensor units in pedestrian navigation, attitude estimation, transportation modes and human activities recognition. These units are composed of accelerometers, magnetometers, gyroscopes and barometer, sensors that we find usually in smartphones, tablets and smartwatches. This area of research in the team will evolve towards multimodal navigation, cooperative and collaborative navigation in indoor and outdoor environments.
5 Highlights of the year
This will be the last year of NECS. The team members are initiating the new team DANCE.
5.1 Awards
- M. L. Delle Monache was awarded the best Transportation Research Part C paper award for 2020.
6 New software and platforms
6.1 New software
6.1.1 GTL
- Name: Grenoble Traffic Lab
- Functional Description: The Grenoble Traffic Lab (GTL) initiative, led by the NeCS team, is a real-time traffic data Center (platform) that collects traffic road infrastructure information in real-time with minimum latency and fast sampling periods. The main elements of the GTL are: a real-time data-base, a show room, and a calibrated micro-simulator of the Grenoble South Ring. Sensed information comes from a dense wireless sensor network deployed on Grenoble South Ring, providing macroscopic traffic signals such as flows, velocities, densities, and magnetic signatures. This sensor network was set in place in collaboration with Inria spin-off Karrus-ITS, local traffic authorities (DIR-CE, CG38, La Metro), and specialized traffic research centers. In addition to real data, the project also uses simulated data, in order to validate models and to test the ramp-metering, the micro-simulator is a commercial software (developed by TSS AIMSUN ©). More details at http://necs.inrialpes.fr/pages/grenoble-traffic-lab.php
-
URL:
http://
necs. inrialpes. fr/ pages/ grenoble-traffic-lab. php - Contact: Carlos Canudas-de-Wit
- Participants: Alain Kibangou, Andres Alberto Ladino Lopez, Anton Andreev, Carlos Canudas-de-Wit, Dominik Pisarski, Enrico Lovisari, Fabio Morbidi, Federica Garin, Hassen Fourati, Iker Bellicot, Maria Laura Delle Monache, Paolo Frasca, Pascal Bellemain, Pietro Grandinetti, Remi Piotaix, Rohit Singhal, Vadim Bertrand
6.1.2 GTL-Ville
- Name: Grenoble Traffic Lab - City
- Keyword: Traffic data
- Functional Description: The GTL-Ville platform is developed within the framework of the ERC Scale-FreeBack project (http://scale-freeback.eu/). Its functions are divided into three axes: 1- Collect traffic data in real time via different sources. We are currently working with three suppliers: TomTom (company) for speed data from Floating Car Data (FCD), La Métro for counting data from existing loops and Karrus (company) to complete the counting data from La Métro via radars deployed since last fall. 2- Estimate traffic indicators with the lowest possible latency using collected data and historical data applied to models developed by PhD students of the ERC project. 3- Visualize raw data and calculated indicators via a web interface (http://gtlville.inrialpes.fr/).
-
URL:
http://
gtlville. inrialpes. fr - Contact: Carlos Canudas-de-Wit
7 New results
7.1 Networks: modeling, analysis, and estimation
7.1.1 Functional target controllability of networks: structural properties and efficient algorithms
Participants: C. Commault, J. van der Waude, P. Frasca.
This line of research, accounted for in 14, considers the problem of controlling a limited number of target nodes of a network. Equivalently, we can see this problem as controlling the target variables of a structured system, where the state variables of the system are associated to the nodes of the network. We deal with this problem from a different point of view as compared to most recent literature. Indeed, instead of considering controllability in the Kalman sense, that is, as the ability to drive the target states to a desired value, we consider the stronger requirement of driving the target variables as time functions. The latter notion is called functional target controllability. We think that restricting the controllability requirement to a limited set of important variables justifies using a more accurate notion of controllability for these variables. Remarkably, the notion of functional controllability allows formulating very simple graphical conditions for target controllability in the spirit of the structural approach to controllability. The functional approach enables us, moreover, to determine the smallest set of steering nodes that need to be actuated to ensure target controllability, where these steering nodes are constrained to belong to a given set. We show that such a smallest set can be found in polynomial time. We are also able to classify the possible actuated variables in terms of their importance with respect to the functional target controllability problem.
7.1.2 Leaderless synchronization of heterogeneous oscillators by adaptively learning the group model
Participants: S. Baldi, P. Frasca.
It is well known that a synchronizing controller can be constructed when a common reference model is available to (some of) the agents. In 11, we show that synchronization can also be achieved without any access to such reference, by letting the agents cooperatively learn a suitable common model, which we refer to as group model. We show that there exists a group model that has the same structure as the oscillators and that the agents can learn its parameters and synchronize to it, by using a combination of consensus dynamics and adaptive regulation. This learning is even possible if the agents do not know their own dynamics, by using adaptive state observers. The distinguishing feature of this approach is making the agents collectively self- organize to their natural group model, instead of making them synchronize to an external reference.
7.1.3 Network games: Protecting shared information
Participants: B. de Witte, P. Frasca, B. Overvest, J. Timmer.
A digital security breach, by which confidential information is leaked, does not only affect the agent whose system is infiltrated but is also detrimental to other agents socially connected to the infiltrated system. Although it has been argued that these externalities create incentives to underinvest in security, this presumption is challenged by the possibility of strategic adversaries that attack the least protected agents. In 15 we study a new model of security games in which agents share tokens of sensitive information in a network of contacts. The agents have the opportunity to invest in security to protect against an attack that can be either strategically or randomly targeted. We show that, in the presence of random attack, underinvestments always prevail at the Nash equilibrium in comparison with the social optimum. Instead, when the attack is strategic, either underinvestments or overinvestments are possible, depending on the network topology and on the characteristics of the process of the spreading of information. Actually, agents invest more in security than socially optimal when dependencies among agents are low (which can happen because the information network is sparsely connected or because the probability that information tokens are shared is small). These overinvestments pass on to underinvestments when information sharing is more likely (and therefore, when the risk brought by the attack is higher). In order to keep our analysis tractable, some of our results on strategic attacks make an assumption of homogeneity in the network, namely, that the network is vertex‐transitive. We complement these results with an analysis on star graphs (which are nonhomogeneous), which confirms that the essential lines of our findings can remain valid on general networks.
7.1.4 On the influence of noise in randomized consensus algorithms
Participants: R. Vizuete, P. Frasca, E. Panteley.
Randomized interactions have been extensively studied in consensus systems, with a wide range of applications including social networks, sensor networks, and clock synchronization. Even if consensus in random networks has been studied for a long time, researchers have mostly considered ideal, noiseless interactions. Instead, more realistic dynamical models should at least include noise which prevents the states of the nodes from reaching consensus. In 27, we quantify the effects of noise by a noise index, which is simply the steady-state normalized mean square error between the states of the nodes and their average, and we study this index for symmetric update matrices. In our first result, we obtain an explicit expression for it. Since this closed form involves the calculation of an -dimensional matrix, we derive an upper bound and a lower bound that depend on the eigenvalues of relevant -dimensional matrices. These results generalize well-known results about deterministic consensus with noise. Next, we refine our analysis for a specific class of random update matrices, which we refer to as Randomly Induced Discretized Laplacians (RIDL), which are generated by sampling a subset of active nodes from a underlying large graph and considering the subgraph induced by the active nodes. This way of sampling random update matrices is motivated by the study of Open Multi-Agent Systems (OMAS): that is, multi-agent systems where agents can leave and join at any time. When the update matrices are RIDLs, our bounds can be expressed as functions of the Laplacian eigenvalues of the underlying graph. Further rewriting of the bounds as functions of the graph's average effective resistance reveals that they are asymptotically tight
7.1.5 Generic controllability of networks of identical SISO dynamical nodes
Participants: C. Commault, A. Kibangou.
Controllability of linear systems has been studied for various applications in large networks in biology, physics and engineering. To address scale and lack of precise knowledge of the network parameters issues, tools from structured system theory are well indicated. Due to the high dimension of the systems, and to the fact that only the graph of the network is known, but not the precise value of the relations between its components, the structured system theory is the natural and convenient approach for such study. Precisely, generic properties, i.e. properties that are true for almost all values of the parameters, can be stated. While most existing results concern networks of single integrators, in this work, we have shown that generic controllability of a network of identical single-input-single-output controllable and observable systems is insured if and only if the structural controllability conditions are satisfied for the graph representing the network. This result constitutes an important generalization of the famous Lin's theorem stated in the seventies. It is even the broadest generalization of this theorem.7.1.6 Cyber-Physical Systems: a control-theoretic approach to privacy and security
Participants: F. Garin, A. Kibangou, S. Gracy.
Cyber-physical systems are composed of many simple components (agents) with interconnections giving rise to a global complex behaviour. One line or research on security of cyber-physical systems models an attack as an unknown input being maliciously injected in the system. We study linear network systems, and we aim at characterizing input and state observability (ISO), namely the conditions under which both the whole network state and the unknown input can be reconstructed from some measured local states. We complement the classical algebraic characterizations with novel structural results, which depend only on the graph of interactions (equivalently, on the zero pattern of the system matrices). More precisely, we obtain two kinds of results: structural results, true for almost all interaction weights, and strongly structural results, true for all non-zero interaction weights. Our results in 2020 concern strongly structural ISO for time-invariant systems 17. We provide first a graphical characterization for s-structural unconstrained ISO (where the input reconstruction might happen with some unspecified delay), and subsequently, sufficient conditions and necessary conditions for s-structural ISO (where we ensure that the input at time can be reconstructed at time ). The conditions presented are in terms of existence of suitable uniquely restricted matchings in bipartite graphs associated with the structured system. In order to test these conditions, we present polynomial-time algorithms. We also discuss an equivalent reformulation of the main conditions in terms of coloring algorithms as in the literature of zero forcing sets.
7.2 Large-scale networks
7.2.1 Average state estimation of clustered large-scale network systems
Participants: M.U.B. Niazi, C. Canudas-de-Wit, A. Kibangou.
Large-scale network systems pose several challenges in terms of monitoring and control. On the one hand, they challenge the computational resources at hand, while on the other hand, the number of available sensors are often limited and not sufficient to render the network system observable. This makes the state estimation task infeasible. Nonetheless, in many applications, it suffices to know the aggregated state profiles of clusters of nodes in the network system. One such profile is the average state of each cluster in the network. In 21 we provide necessary and sufficient conditions such that the average states of the pre-specified clusters of the network system can be reconstructed and/or asymptotically estimated, which are captured by the notions of average observability and average detectability, respectively. To achieve computational tractability, average observability and average detectability of a clustered network system are defined via the projected network system, which is of tractable dimension and is obtained by aggregating the clusters. The corresponding necessary and sufficient conditions of average observability and average detectability are provided and interpreted through the underlying structure of the induced subgraphs and the induced bipartite subgraphs, which capture the intra-cluster and inter-cluster topologies of the clustered network system, respectively. Moreover, the design of an average state observer whose dimension is minimum, and equals the number of clusters in the clustered network system, is presented.
7.2.2 Aggregated temperature estimation for the thermal monitoring of large buildings
Participants: M.U.B. Niazi, C. Canudas-de-Wit, A. Kibangou.
Residential and commercial buildings play a significant part in global energy consumption and greenhouse gas emissions. For instance, in France, they are one of the largest sources of energy consumption, Levy and Belaid (2018), and amount to 23% of the national greenhouse gas emissions, Derbez et al. (2014). In mitigating the effects of global warming, therefore, one of the forefronts is to develop efficient techniques for thermal monitoring and control of the buildings. Thus, thermal monitoring is important not only to ensure the comfort of building inhabitants but also to reduce energy consumption and greenhouse gas emissions. It can be, however, a challenging task because of limited computational and sensing resources at hand. In 33 we provide an efficient technique to estimate average (or mean operative) temperatures of rooms in a building. The proposed average observer to estimate the average temperatures of rooms in real-time is of minimum order and its parameters are chosen optimally in order to minimize the asymptotic estimation error. We employ a simple on/off control policy based on the average observer to regulate the mean operative temperatures of rooms. Such an on/off policy for regulation saves around 25.32% of the energy, which means that the heaters on average remain off 25.32% of the day. Since the goal of this work is to present an optimal estimation technique, we believe that a better control technique to further minimize the energy consumption can be developed, which is deferred for the future work.
7.2.3 Estimation of the state variance in large-scale network systems
Participants: M.U.B. Niazi, C. Canudas-de-Wit, A. Kibangou.
Large-scale network systems are ubiquitous in modern engineering applications such as traffic networks, building thermal systems, and distributed sensor networks. Complete monitoring of such large-scale systems is usually not possible due to limited computational and sensing resources. Limited computational resources can make the real-time state estimation task infeasible, whereas limited number of sensors may render the system unobservable. It is reasonable, therefore, to monitor the network system by estimating the aggregated state profiles such as the state average and variance. The state variance of a network system is a nonlinear functional computed as the squared deviation of the network's state vector. Such a quantity is useful to monitor how much the states of network nodes are spread around their average mean. Estimating state variance is crucial when the full state estimation of a network system is not possible due to limited computational and sensing resources. In 32 we propose a novel methodology to estimate the state variance in a computationally efficient way. We first provide the fundamental limit of functional observers with regards to the state variance, which requires that the observer should have an order of at least the number of unmeasured nodes minus one. That is, even if the observer is of minimum order, it is equivalent to estimate all but one states of the unmeasured nodes in order to asymptotically estimate the state variance. This makes the problem trivial because it can be argued that, in large-scale systems, estimating all but one states is almost the same as estimating all the states. Thus, if we can estimate all the states, there is no need to estimate the state variance. The infeasibility of designing a nonlinear functional observer directs us towards the estimation of state variance in an approximate sense. That is, we first approximate the state variance by projecting the network system on a lower dimensional state space by clustering. The state vector of the projected system includes the states of the measured nodes and the average states of the clusters. Then, by estimating the average states of the clusters, we can estimate the approximated state variance.
7.2.4 Average state estimation in presence of outliers
Participants: U. Pratap, C. Canudas-de-Wit, F. Garin.
In recent years, there has been a lot of interest in the problem of estimation in network control systems due to its vast area of application such as power networks, communication networks, and traffic networks to name a few. In particular, in some networks, instead of reconstructing the entire states, some aggregation of the unmeasured states are estimated using a few available measurements obtained from the dedicated sensors placed at some positions. One of the options is to estimate the average of the unmeasured states. This approach is very beneficial in terms of reducing the complexity. However, if there is an outlier among the unmeasured states, which is so different from the other states that it affects the average value significantly, the average value so estimated may not lead to the true average value. Instead, one might look for an average value that excludes the outlier. In 35, we propose a methodology to detect the outlier and to estimate the average state excluding the outlier (trimmed-average). At first, a design of a scalar and tunable observer has been given along with the condition under which a bank of these observers can be designed to estimate the average of the unmeasured states while excluding an element at every possible position. In the proposed method, we deploy a bank of these observers, and then compare the estimates so obtained using a dissimilarity criterion in order to measure how far are the estimates from each other. Then by finding the estimates with largest distance from all the other estimates, we detect the outlier and the average estimate without the outlier.
7.2.5 Subgraph detection for average detectability of LTI systems
Participants: N. Martin, C. Canudas-de-Wit, P. Frasca.
Observation and detection of networked systems aim to reconstruct the evolution of the system based on the measurement of few nodes. In large-scale networks, reconstructing the exact state of each node becomes more complex and in practice it is often superfluous. Reconstructing an aggregated version of the system is often sufficient. In the light of this observation, paper 20 considers the notion of average detectability: A system is said to be average detectable if it is possible to reconstruct the average of the subset of its unmeasured nodes. We show here that for a particular type of system, that is negative uniform networks, the average detectability property is reached when the subgraph induced by the unmeasured nodes is regular. Thus, we study the detection of such regular induced subgraph and we propose an algorithm to complete this task. We introduce also the relaxed notion of quasi-regularity ensuring an approximate reconstruction of the average. This paper presents algorithms to detect regular induced subgraphs (RIS) and quasi-regular induced subgraph (q-RIS). We propose an extension to detect multiple quasi-regular induced subgraphs (mq-RIS) in order to reconstruct the average of several subgraphs of the system. Finally we apply our method to the evolution of an epidemic spreading over a simulated contact network over the largest cities in France based on a SIS model.
7.2.6 Shape-based nonlinear model reduction for 1D conservation laws
Participants: D. Nikitin, C. Canudas-de-Wit, P. Frasca.
The problems of controlling high-dimensional systems appear naturally in many areas, including urban traffic, flow dynamics, chemical processes, heating processes, etc. Mathematical models of such systems can be described in various ways, for example, partial differential equations, conservation laws, or networks. However, regardless of the way it is modelled, the problem of controlling the state of the entire system is usually highly complex. It is often preferable to control not the entire state of the system, but some aggregated characteristics. In 34 we present a novel method for model reduction of one-dimensional conservation law to the dynamics of the parameters describing the approximate shape of the solution. Depending on the parametrization, each parameter has a well-defined physical meaning. Thus, the dynamics of the system turns into the dynamics of the shape parameters, and this new ODE system can be used for the estimation and control purposes. The model reduction is performed by minimizing the divergence of flows between the original and reduced systems, and we show that this is equivalent to the minimization of the Wasserstein distance derivative. The method is then tested on the heat equation and on the LWR (Lighthill-Whitham-Richards) model for vehicle traffic.
7.2.7 Continuation Method for Large-Scale Modeling and Control: from ODEs to PDE
Participants: D. Nikitin, C. Canudas-de-Wit, P. Frasca.
Most of the systems we encounter in real life consist of such a large number of particles that the direct analysis of their interaction is impossible. In such cases, simplified models are used that aggregate the behavior of a set of particles and replace them with a continuous representation. In 42 we present a continuation method which transforms spatially distributed ODE systems into continuous PDE. We show that this continuation can be performed both for linear and nonlinear systems, including multidimensional, space-and time-varying systems. When applied to a large-scale network, the continuation provides a PDE describing evolution of continuous state approximation that respects the spatial structure of the original ODE. Our method is illustrated by multiple examples including transport equations, Kuramoto equations and heat diffusion equations. As a main example, we perform the continuation of a Newtonian system of interacting particles and obtain the Euler equations for compressible fluids, thereby providing an original alternative solution to Hilbert's 6th problem. Finally, we leverage our derivation of the Euler equations to control multiagent systems, designing a nonlinear control algorithm based on the continuous approximation to stabilize a robotic formation along the desired trajectory, performing a maneuver of passing through a window. The control is derived on a level of a PDE representation and then it is discretized to be implemented on every agent.
7.2.8 Graphon-based sensitivity analysis of SIS epidemics
Participants: R. Vizuete, P. Frasca, F. Garin.
Traditionally, researchers have used concepts of Graph Theory for the analysis of networks, where a complete knowledge of the network graph is required for most applications. One of the most important dynamics over networks is a Susceptible-Infected-Susceptible (SIS) epidemic which describes a disease that can infect agents irrespective of whether they were infected earlier. Even if the analysis and control of epidemics are well studied topics, the applicability of the theoretical results is often limited by restrictive assumptions that require complete knowledge of the dynamical laws of the nodes, of their states, and of the structure of the network. One of the most promising tools to address these problems are graph functions, also called graphons, which are limits of sequences of dense graphs. In 26 we focus on the deterministic SIS epidemic model, interpreted as a meta-population model, where the state of each node is the fraction of infected individuals in a sub-population and we model the network as a graphon. We consider special cases of graphons corresponding to stochastic block models, which are used to model the community structures that are frequent in real social networks such that each node can be considered as a small population, like a village or a neighborhood, and each block as a region or city. The inclusion of additive noise is also frequently used to include un-modeled phenomena and features in epidemics models. In network dynamics, the properties of robustness to noise can often be expressed through the spectral properties of the network. Therefore, we look at the spectral properties of graphons to evaluate the robustness properties of large networks described by graphons. We leverage the properties of piecewise Lipschitz graphons with finite rank (that encompass stochastic block models) for the stability and sensitivity analysis of SIS epidemics over large networks and show that the spectral properties of the graphon allow to approximately evaluate stability and robustness to noise.
7.3 Transportation networks, traffic, and multi-vehicle systems
7.3.1 Adaptive cruise control systems: stability and parameter estimation
Participants: M. L. Delle Monache, Y. Wang, G Gunter, M. Nice, D Gloudemans, R. Stern, S. McQuade, R. Bhadani, M. Bunting, R. Lysecky, B. Seibold, J. Sprinkle, B. Piccoli, D. Work.
Adaptive cruise control systems are now widely available as a standard or optional feature on many of the best-selling cars around the world. Modeling Adaptive Cruise Control (ACC) vehicles enables the understanding of the impact of these vehicles on traffic flow. In 28, two online methods are used to provide real time system identification of ACC enabled vehicles. The first technique is a recursive least squares (RLS) approach, while the second method solves a nonlinear joint state and parameter estimation problem via particle filtering (PF). A parameter identifiability analysis for both methods analytically shows that the model parameters are not identifiable using equilibrium driving. The accuracy and computational runtime of the online methods are compared to a commonly used offline simulation- based optimization (i.e., batch optimization) approach. The methods are tested on synthetic data as well as on empirical data collected directly from a 2019 model year ACC vehicle using data from sensors that are part of the stock ACC system.Subsequently, in 19 the string stability of seven 2018 model year ACC equipped vehicles that are widely available in the US market is assessed. Seven distinct vehicle models from two different vehicle makes are analyzed using data collected from more than 1,200 miles of driving in car-following experiments with ACC engaged by the follower vehicle. The resulting dataset is used to identify the parameters of a linear second order delay differential equation model that approximates the behavior of the black box ACC systems. The string stability of the data-fitted model associated with each vehicle is assessed, and the main finding is that all seven vehicle models have string unstable ACC systems. For one commonly available vehicle model that offers ACC as a standard feature on all trim levels, we validate the string stability finding with a multi-vehicle platoon experiment in which all vehicles are the same year, make, and model. In this test, an initial disturbance of 6 mph is amplified to a 25 mph disturbance, at which point the last vehicle in the platoon is observed to disengage the ACC. The data collected in the driving experiments is made available, representing the largest publicly available comparative driving dataset on ACC equipped vehicles.
7.3.2 Control using autonomous vehicles: string stability approach
Participants: V. Giammarino, S. Baldi, P. Frasca, M. L. Delle Monache.
In recent years, field experiments have been performed on ring road- ways with human-driven vehicles 46 or with a mix of human-driven and autonomous vehicles 45. While these experiments demonstrate the potential for controlling traffic flows by a small number of autonomous vehicles, the theoretical framework about such a possibility is to a large extent incomplete. Indeed, most work on mixed traffic focused on classical asymptotical stability notions, neglecting that human drivers are prone to the interconnected instability known in the literature as string instability. In 18 we enhance the existing theories to meet the questions raised by the field experiments. It starts from the observation that the standard notion of string stability on a ring roadway is too demanding for a mixed traffic scenario: therefore, a new inter-connected stability definition, named weak ring stability, is proposed. This new interconnected stability notion, in combination with classical stability, is able to explain phenomena observed in field experiments and to highlight possibilities and limitations of traffic control via sparse autonomous vehicle. Furthermore, it allows designing AV controllers with improved string stability specifications, at the price of reducing the sparsity of the autonomous vehicles.7.3.3 Control using autonomous vehicles: a pde-ode model approach
Participants: T. Liard, R. Stern, M. L. Delle Monache.
In 30, we consider the possibility of using a small number of autonomous vehicles (AV) for traffic control of the predominantly human-piloted traffic. Specifically, we consider the control of the AV to act as a moving bottleneck, which is used to optimize traffic flow properties such as fuel consumption of the combined human-piloted and autonomous traffic flow. We use a coupled partial differential equation (PDE)-ordinary differential equation (ODE) framework to model the bulk traffic flow using a PDE, and the trajectory of an autonomous vehicle in the flow using an ODE, depending on the downstream traffic density. The autonomous vehicle acts on the traffic flow as a moving bottleneck via a moving flux constraint. Using this modeling framework, we consider an optimal control problem which consists in finding the optimal AV trajectory to minimize fuel consumption of the entire traffic flow. We prove existence of optimal AV trajectories and we present two different optimal driving strategies depending on the initial traffic conditions.7.3.4 Three phase fundamental diagram from three dimensional traffic data
Participants: M. L. Delle Monache, K. Chi, Y. Chen, P. Goatin, K. Han, J.-M. Qiu, B. Piccoli.
In 16 we use empirical traffic data collected from three locations in Europe and the US (Rome, Sophia Antipolis and Las Vegas) to reveal a three-phase fundamental diagram with two phases located in the uncongested regime. Model-based clustering, hypothesis testing, and regression analyses are applied to the speed-flow-occupancy relationship represented in the three-dimensional space to rigorously validate the three phases and identify their gaps. The finding is consistent across the aforementioned different geographical locations. Accordingly , we propose a three-phase macroscopic traffic flow model and a characterization of solutions to the Riemann problems. This work identifies critical structures in the fundamental diagram that are typically ignored in first-and higher-order models, and could significantly impact travel time estimation on highways.7.3.5 Variable Speed Limits Control in an Urban Road Network to Reduce Environmental Impact of Traffic
Participants: B. Othman, G. De Nunzio, D. Di Domenico, C. Canudas-de-Wit.
In 39 we address the problem of improving traffic sustainability and traffic efficiency in an urban road network, by implementing variable speed limits (VSL). A nonlinear model predictive control (NMPC) design based on a first-order macroscopic traffic flow model is proposed for the speed limits optimization in each segment of the road network. Simulation results show the effectiveness of the proposed control approach, compared to reference cases in which the speed limits are constantly set to 30 km/h or 50 km/h. In the particular case of congested traffic conditions, the controller is capable of reducing both energy consumption and travel time, without delaying users waiting at the network boundaries.7.3.6 Boundary Control Design for Traffic with Nonlinear Dynamics
Participants: L. Tumash, C. Canudas-de-Wit, M.L. Delle Monache.
Conservation laws are a very important topic to study nowadays, since a significant part of physical systems is based on the principle of the conservation of some quantity, for example, mass or energy. Urban and highway traffic behaviour is modeled via conservation laws with the principle of preserving the number of cars. In 43 we address the problem of boundary control design for a nonlinear scalar conservation law that is widely used in traffic modelling. Namely, 43 is devoted to the boundary control of a vehicle density that solves an LWR PDE with the triangular flow-density relation evolving along a single road. The target state is a time- and space-dependent trajectory. The main contribution of this work is that neither the state nor the desired trajectory are restricted to any particular traffic regime. The boundary control law is explicitly constructed using the analytical solution of the Hamilton-Jacobi equation, which is an integral form of the LWR PDE. We design a feedback controller and illustrate on a numerical example how it can drive a state in the mixed traffic regime to a time-dependent trajectory.7.3.7 Equilibrium Manifolds in 2D Fluid Traffic Models
Participants: L. Tumash, C. Canudas-de-Wit, M.L. Delle Monache.
In 37 we analytically find a steady-state in a large-scale urban traffic network with known and constant demand and supply on its boundaries. Traffic dynamics are given by a continuous two-dimensional macroscopic model, where the state corresponds to the vehicle density evolving in a 2D continuum plane. Thereby, the traffic flow magnitude is given by the space-dependent fundamental diagram and the the flow direction depends on the underlying network topology (i.e., mutual location of the roads and location of the intersections). In order to find a steady-state, we develop a novel method that contains coordinate transformation such that the 2D equation can be rewritten as a parametrized set of 1D equations. This technique allows us to obtain the curves along which the traffic flow evolves, which are essentially the integral curves of the flux field constructed from the network geometry. The main contribution of 37 is a model-based steady-state computation for a two-dimensional traffic model. This has never been done before. The steady-state solution will depend only on network topology and demand and supply on its boundary. The presented technique could further be applied for a model-based control design of large-scale traffic networks.7.3.8 Topology-based control design for congested areas in urban networks
Participants: L. Tumash, C. Canudas-de-Wit, M.L. Delle Monache.
Rapidly growing urban areas cause heavy traffic congestions that negatively impact traffic mobility and environment, which makes traffic management an important issue to study. In 38, we consider a large-scale urban network with unidirectional roads, where the traffic dynamics are governed by a two-dimensional LWR model that has a space-varying flow-density function. The traffic network under consideration includes congested areas, which we want to control from the boundary such that the maximal throughput of the traffic flow is achieved in the steady state. The stabilized system is then characterised by a reduced average latency and an increased average velocity. The main contribution of 38 is to suggest a technique for the control design, for which we only need to know the network topology and its infrastructure, i.e. the maximal speeds and roads’ capacities. This is the first work of this kind for two-dimensional traffic systems providing an explicit solution to the problem of control design that provides the maximal throughput.7.3.9 Average density detectability in traffic networks using virtual road divisions
Participants: M. Rodriguez-Vega, C. Canudas-de-Wit, H. Fourati.
Accurate traffic state estimation is important in modern intelligent transportation systems, as they provide traffic operators with the necessary information to take decisions about control strategies, network design, and design traffic policies. As the size of the network increases, the state estimation for every road becomes computationally expensive. In some applications, the individual states might not be necessary, and an average state might be sufficient. In 36, we deal with the problem of the average density estimation of a large scale traffic network. Our main contribution is the proposal of a reduced-order open-loop observer for the average density of a region. This observer is shown to converge for a virtual representation of the network where each road is divided into a specific number of cells. The proposed observer is tested using simulations of the real case of the Grenoble traffic network.
7.4 Social networks: models and analysis
7.4.1 Junk news bubbles: modelling the rise and fall of attention in online arenas
Participants: M. Castaldo, T. Venturini, P. Frasca, F. Gargiulo.
In this article 12, we present a type of media disorder which we call ‘junk news bubbles’ and which derives from the effort invested by online platforms and their users to identify and circulate contents with rising popularity. Such emphasis on trending matters, we claim, can have two detrimental effects on public debates: first, it shortens the amount of time available to discuss each matter and second, it increases the ephemeral concentration of media attention. We provide a formal description of the dynamic of junk news bubbles, through a mathematical exploration of the famous ‘public arenas model’ developed by Hilgartner and Bosk in 1988. Our objective is to describe the dynamics of the junk news bubbles as precisely as possible to facilitate its further investigation with empirical data.
7.4.2 A dynamic game of opinion dynamics in social networks: Accord and discord as Nash equilibria
Participants: M.U.B. Niazi, A.B. Özgüler.
Most of the models of opinion dynamics in the literature focus on the consensus formation between social agents in a network as an emergent phenomenon. However, disagreements and situations of conflict are also quite common in real life. Thus, several models have also been proposed to explain the emergence of conflict or discord in a social network in terms of polarization of agents into multiple groups. Nonetheless, such an emergence of discord remains to be explained when the social agents are strategic in nature. In 22 we present a non-cooperative dynamic game model of opinion dynamics with open-loop information structure. In this game, the agents’ motives are shaped by their expectations of the nature of others’ opinions as well as how susceptible they are to get influenced by others, how stubborn they are, and how quick they are willing to change their opinions on a set of issues in a prescribed time interval. These motives are independently formed by all agents. The existence of a Nash equilibrium in the network means that a collective behavior emerges out of local interaction rules and these individual motives. We prove that a unique Nash equilibrium may exist in the game under quite different circumstances. It may exist not only if there is a harmony of perceptions among the agents of the network, but also when agents have different views about the correlation among issues. The first leads to an accord in the network usually expressed as a partial consensus, and the second to a discord in the form of oscillating opinions. In the case of an accord, the harmony in the network may be in the form of similarity in pairwise conceptions about the issues but may also be an agreement on the status of a “leader” in the network. A Nash equilibrium may fail to exist only if the network is in a state of discord.
7.4.3 Opinion Dynamics with Topological Gossiping: Asynchronous Updates under Limited Attention
Participants: W.S. Rossi, P. Frasca.
Opinion dynamics models with state-dependent connectivity are more complex than models where connectivity is fixed. In 23 we introduce a general model of opinion dynamics with opinion-dependent connectivity. Agents update their opinions asynchronously: for the updating agent, the new opinion is the average of the closest opinions within a subset of agents that are sampled from the population of size . Depending on and with respect to , the dynamics can have a variety of equilibria, which include consensus and clustered configurations. The model covers as special cases a classical gossip update (if ) and a deterministic update defined by the nearest neighbors (if ). We prove that the dynamics converges to consensus if . Before convergence, however, the dynamics can remain for long time in the vicinity of metastable clustered configurations.7.5 Research related to the COVID-19 pandemic
7.5.1 Modeling and control of COVID-19 epidemic through testing policies
Participants: M.U.B. Niazi, A. Kibangou, C. Canudas-de-Wit, D. Nikitin, L. Tumash, P.-A. Bliman.
The COVID-19 epidemic started in Wuhan, China, at the end of 2019, was declared to be a pandemic by the World Health Organization (WHO) on March 11, 2020. The pandemic shook the economy of the whole world with a significant reduction of exports, a decline in tourism, mass unemployment, and business closures. Governments and health authorities worldwide have responded by implementing non-pharmaceutical intervention (NPI) policies that include travel restrictions, lockdown strategies, social distancing measures, workplace hazard controls, closing down of schools and workplaces, curfew strategies, and cancellation of public events. On March 16, 2020, the Director General of WHO, Dr. T. A. Ghebreyesus, gave a simple message to all countries, “Test, test, test." Following the recommendation of the WHO director, with different levels of setups, many governments increased their testing capacities. Testing for the infected cases is one of the most important mechanisms to control an epidemic. It enables to isolate the detected infected individuals, thereby limiting the disease transmission to the susceptible population. However, despite the significance of testing policies, the recent literature on the subject lacks a control-theoretic perspective. In 41 an epidemic model that incorporates the testing rate as a control input is presented. The proposed model differentiates the undetected infected from the detected infected cases, who are assumed to be removed from the disease spreading process in the population. First, the model is estimated and validated for COVID-19 data in France. Then, two testing policies are proposed, the so-called best-effort strategy for testing (BEST) and constant optimal strategy for testing (COST). The BEST policy is a suppression strategy that provides a lower bound on the testing rate such that the epidemic switches from a spreading to a non-spreading state. The COST policy is a mitigation strategy that provides an optimal value of testing rate that minimizes the peak value of the infected population when the total stockpile of tests is limited. Both testing policies are evaluated by predicting the number of active intensive care unit (ICU) cases and the cumulative number of deaths due to COVID-19. We found that the BEST policy could have reduced the peak of number of ICU cases and the cumulative number of deaths by 34.71% and 74.45%, respectively. On the other hand, the COST policy could have reduced the peak of number of ICU cases and the cumulative number of deaths by 11.12% and 37.52%, respectively.
7.5.2 Analyzing essential traffic impact extracted during COVID-19 lockdown in a developing country
Participants: T. Moyo, A. Kibangou, W. Musakwa.
In developing countries, metropolitan cities, due to their economic activities, attract an increasing amount of commuters on a daily basis. This has led to major freeways and roads experiencing high levels of congestion and consequently high pollution levels. In 2020, due to a global pandemic of an outbreak of Corona Virus (COVID-19), the national government declared a national shutdown with only essential traffic being allowed to operate. Given the scenario of the national lock-down this allows for the statistical analysis of the impact of essential traffic on the overall transportation system. Consequently the aim of the paper was to assess the congestion and C02 emission impact of essential traffic for the City of Johannesburg. Using an exploratory approach, we monitored and collected traffic congestion data from the Tomtom traffic index for the metropolitan city of Johannesburg, South Africa. In 31, we develop a relationship between congestion and pollution to visualise the daily variations in pollution and congestion levels. We demonstrate this by comparing variations in congestion levels in two epochs, viz the period without movement restrictions and the period whereby movement is restricted. The results reveal essential traffic on the congestion index to be below 22 percent for both weekends and weekdays. A scenario common only during weekends in 2019. Whilst for the emission index, CO2 levels are approximately less than 45 percent throughout the week. The paper concludes the investment into mining and analysing traffic data has a significantly role for future mobility planning in both the developed and developing world and, more generally, improving the quality of commuting trips in the city.7.5.3 The rhythms of the night: increase in online night activity and emotional resilience during the spring 2020 Covid-19 lockdown
Participants: M. Castaldo, T. Venturini, P. Frasca, F. Gargiulo.
The lockdown orders established in multiple countries in response to the Covid-19 pandemic are arguably one of the most widespread and deepest shock experienced by societies in recent years. Studying their impact trough the lens of social media offers an unprecedented opportunity to understand the susceptibility and the resilience of human activity patterns to large-scale exogenous shocks. In 44 we firstly investigate the changes that this upheaval has caused in online activity in terms of time spent online, themes and emotion shared on the platforms, and rhythms of content consumption. Secondly, we examine the resilience of certain platform characteristics, such as the daily rhythms of emotion expression. In order to do so, two independent datasets about the French cyberspace ave been considered: a fine-grained temporal record of almost 100 thousand YouTube videos and a collection of 8 million Tweets between February 17 and April 14, 2020. In both datasets we observe a reshaping of the circadian rhythms with an increase of night activity during the lockdown. The analysis of the videos and tweets published during lockdown shows a general decrease in emotional contents and a shift from themes like work and money to themes like death and safety. However, the daily patterns of emotions remain mostly unchanged, thereby suggesting that emotional cycles are resilient to exogenous shocks.
7.6 Multisensor data fusion for navigation
Participants: M. Zmitri, H. Fourati, C. Prieur.
7.6.1 Magnetic field gradient and magnetometers network for velocity estimation in indoor navigation
We proposed an advanced solution to improve the inertial velocity estimation of a rigid body, for indoor navigation, through implementing a magnetic field gradient-based Extended Kalman Filter (EKF) 29. The proposed estimation scheme considers a set of data from a triad of inertial sensors (accelerometer and gyroscope), as well as a determined arrangement of magnetometers array. The inputs for the estimation scheme are the spatial derivatives of the magnetic field, from the magnetometers array, and the attitude, from the inertial sensors. As shown in the literature, there is a strong relation between the velocity and the measured magnetic field gradient. However, the latter usually suffers from high noises. Then, the novelty of the proposed EKF is to develop a specific equation to describe the dynamics of the magnetic field gradient. This contribution helps to filter, first, the magnetic field and its gradient and second, to better estimate the inertial velocity. Some numerical simulations that are based on an open source database show the targeted improvements. This approach is extended to position estimation in the case of a foot-mounted application and the results are very promising.
7.6.2 Magnetic gradient-based EKF and LSTM learning model for velocity estimation under a network of magnetometers
We present a novel method to improve the inertial velocity estimation of a mobile body, for indoor navigation, using solely raw data from a triad of inertial sensors (accelerometer and gyroscope), as well as a determined arrangement of magnetometers array 40. The key idea of the method is the use of deep neural networks to dynamically tune the measurement covariance matrix of an Extended Kalman Filter (EKF). To do so, a Long Short-Term Memory (LSTM) model is derived to determine a pseudo measurement of inertial velocity of the target under investigation. This measurement is used afterwords to dynamically adapt the measurement noise parameters of a magnetic field gradient-based EKF. As it was shown in the literature, there is a strong relation between inertial velocity and magnetic field gradient, which is highlighted with the proposed approach in this work. Its performance is tested on the Openshoe dataset, and the obtained results compete with the INS/ZUPT approach, that unlike the proposed solution, can only be applied on foot-mounted applications and is not adequate to all walking paces.
7.7 Prediction and control in large-scale process
Participants: N. Toktassynova, H. Fourati, B. Suleimenov.
The sintering process of phosphorite ore occurs with a large amount of return caused by untimely process control. The control task of phosphorite ore sintering is to regulate the parameters of the process to obtain a high quality sinter. The parameter clearly responsible for sinter quality is the temperature in the wind box. Therefore, in order to solve the control task, it is necessary to predict the highest temperature of the charge (also known as the burn through point (BTP)). The theory of grey systems is used as a predictive model, which makes it possible to obtain an adequate model that uses a small number of initial samples of real temperature data 24. Based on the grey model GMC(1,n) a new optimal model is presented, which is constructed by using optimization algorithm. Optimal model predicts the BTP, and to establish an optimal regulation, a control synthesis is carried out through an optimization of the prediction according to the “particle swarm” algorithm 25.8 Bilateral contracts and grants with industry
8.1 Bilateral contracts with industry
TMI-V (Tachymètre Magnéto-Inertiel couplé Vision). Co-PI: H. Fourati (2018-2022)
The objective of the TMI-V project is the indoor localization without infrastructure, by developing an autonomous, precise, robust solution with no prior knowledge of the environment integrated in equipment worn on the upper body to be used in virtual reality and augmented reality applications. An array of magnetometers and inertial sensors will be used. The project is ongoing, in collaboration with SysNav company.
9 Partnerships and cooperations
9.1 International initiatives
9.1.1 Inria associate team not involved in an IIL
MEMENTO
- Title: Modeling autonomous vehicles in traffic flow
- Duration: 2018 - 2020
- Coordinator: Maria Laura Delle Monache
- Partners: Department of Environmental and Civil engineering, Université Vanderbilt, Nashville (United States)
- Inria contact: Maria Laura Delle Monache
- Summary: In recent years, the strategic priorities of automotive and transportation systems focus on research, development and adoption of automation-related technologies as they emerge. As these technology developments are introduced in the traffic stream, an open question is how the mathematical models that are at the heart of transportation planning and operations will need to be advanced to accommodate these changes. The goal of the NeCS-Vanderbilt, MEMENTO, associate team is to create a multidisciplinary environment to model autonomous vehicles (AV) in human traffic flow. Specifically, our goal is to develop a unified micro-macro approach for traffic management, involving human drivers and autonomous vehicles by providing analytical and numerical tools for traffic modeling, estimation and control. We will work towards field operational tests, by using instrumented cars to collect data on AVs trajectories and their interaction with the traffic flow with human drivers.
9.1.2 Participation in other international programs
Rutgers Global Grant - International collaborative research grant
- Title: Mean field game models for traffic application
- Duration: 2019 - 2020
- Coordinator: Maria Laura Delle Monache
- Partners: Department of mathematical sciences, Rutgers University - Camden (United States)
- Inria contact: Maria Laura Delle Monache
- Summary: This project focuses on the theoretical tools for traffic systems to mitigate traffic events that adversely affect. Specifically, the project will build algorithms to mitigate phantom traffic jams, which are instabilities caused by human driving behavior, lane changes, and other disturbances. This project is premised on the concept that connected and autonomous vehicles (CAVs) can act as instability pacifiers and enable a new era of freeway traffic management in which CAVs themselves are part of the traffic control system. The stabilizing Lagrangian (i.e., mobile) control signal will be fed directly to the vehicles, which will adjust their speed and lanes to match the requirements of the control.
9.2 International research visitors
No visitors due to the ongoing pandemics.
9.3 European initiatives
9.3.1 FP7 & H2020 Projects
Scale-FreeBack
- Type: ERC Advanced Grant
- Duration: Sep. 2016 to Aug. 2021
- Coordinator: C. Canudas de Wit
- Inria contact: C. Canudas de Wit
- Abstract: The overall aim of Scale-FreeBack is to develop holistic scale-free control methods of controlling complex network systems in the widest sense, and to set the foundations for a new control theory dealing with complex physical networks with an arbitrary size. Scale-FreeBack envisions devising a complete, coherent design approach ensuring the scalability of the whole chain (modelling, observation, and control). It is also expected to find specific breakthrough solutions to the problems involved in managing and monitoring large-scale road traffic networks. Field tests and other realistic simulations to validate the theory will be performed using the equipment available at the Grenoble Traffic Lab center (see GTL), and a microscopic traffic simulator replicating the full complexity of the Grenoble urban network.
-
See also: http://
scale-freeback. eu
9.3.2 Collaborations in European programs, except FP7 and H2020
COST Action
- Title: Mathematical models for interacting dynamics on networks
- Duration: 2019 - 2023
- Coordinator: Marjeta Kramar Fijavz
- Inria contact: Maria Laura Delle Monache
- Summary: Many physical, biological, chemical, financial or even social phenomena can be described by dynamical systems. It is quite common that the dynamics arises as a compound effect of the interaction between sub-systems in which case we speak about coupled systems. This Action shall study such interactions in particular cases from three points of view: (i) the abstract approach to the theory behind these systems, (ii) applications of the abstract theory to coupled structures like networks, neighbouring domains divided by permeable membranes, possibly non-homogeneous simplicial complexes, etc., (iii) modelling real-life situations within this framework. The purpose of this Action is to bring together leading groups in Europe working on a range of issues connected with modelling and analysing mathematical models for dynamical systems on networks. It aims to develop a semigroup approach to various (non-)linear dynamical systems on networks as well as numerical methods based on modern variational methods and applying them to road traffic, biological systems, and further real-life models. The Action also explores the possibility of estimating solutions and long time behaviour of these systems by collecting basic combinatorial information about underlying networks.
9.4 National initiatives
DOOM (Systems-theory for the Disorders Of Online Media). 80 PRIME from CNRS MITI (2019–2022). PI: P. Frasca
Online social media have a key role in contemporary society and the debates that take place on them are known to shape political and societal trends. For this reason, pathological phenomena like the formation of “filter bubbles” and the viral propagation of “fake news” are observed with concern. The scientific assumption of this proposal is that these information disorders are direct consequences of the inherent nature of these communication media, and more specifically of the collective dynamics of attention thereby. In order to capture these dynamics, this proposal advocates the mathematical modelling of the interplay between the medium (algorithmic component) and the users (human component). The resulting dynamics shall be explored by a system-theoretic approach, using notions such as feedback and stability. This quantitative and rigorous approach will not only unlock fundamental insights but also deliver suggestions on suitable policies to manage the media.
HANDY (Hybrid and Networked Dynamical Systems). ANR PRC (2019-2022). Co-PI: P. Frasca
Networked dynamical systems are ubiquitous in current and emerging technologies. From energy grids, fleets of connected autonomous vehicles to online social networks, the same scenario arises in each case: dynamical units interact locally to achieve a global behavior. When considering a networked system as a whole, very often continuous-time dynamics are affected by instantaneous changes, called jumps, leading to so-called hybrid dynamical systems. Hybrid phenomena thus play an essential role in these control applications, and call upon the development of novel adapted tools for stability and performance analysis and control design. In this context, the aim of HANDY project is to provide methodological control-oriented tools for realistic networked models, which account for hybrid phenomena. The project brings together researchers from LAAS in Toulouse, CRAN in Nancy, GIPSA in Grenoble and LSS in Gif-sur-Yvette, with expertise in various domains of automatic control, ranging from geometric control and optimization, switched systems, hybrid dynamics, nonlinear control, and multi-agent systems.
See also: http://
AgileWorld-MRSEI. PI: A. Kibangou
AgileWorld is an ANR-MRSEI project (2018-2020), which aims at building an European network for an innovative training on road transportation systems in a connected world. The funding will help to prepare and then submit a proposal for the MSCA-ITN 2019 call. For this purpose a workshop was organized in November 2019 with the partners of the project in Grenoble.
10 Dissemination
10.1 Promoting scientific activities
10.1.1 Scientific events: organisation
Member of the organizing committees
M. L. Delle Monache serves on the organizing committee of the 2021 CPS-IoT week as Workshop Chair.
10.1.2 Scientific events: selection
Member of the conference program committees
F. Garin is Associate Editor in the IEEE Control System Society Conference Editorial Board (this year, she served for CDC 2020, ACC 2021) and Associate Editor in the European Control Association (EUCA) Conference Editorial Board (this year, she served for ECC 2021). She has also been a member of the Program Committee for Complex Networks 2020.
M. L. Delle Monache is Associate Editor in the European Control Association (EUCA) Conference Editorial Board (this year, she served for ECC 2021) and Associated Editor in the IEEE Intelligent Transportation System Conference (ITSC) Editorial Board (this year, she served for ITSC 2021).
P. Frasca is member of the International Program Committee of the 2021 IFAC Symposium on Robust Control Design (ROCOND 2021).
H. Fourati is member of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijng, China, Sep. 2020; the International Conference on Control, Decision and Information Technologies (CoDIT), Prague, République Tchèque, Jul. 2020; Euro Working Group on Transportation Meeting (EWGT), Paphos, Chypre, Sept. 2020; International Symposium on Advanced Electrical and Communication Technologies (ISAECT), Marrakech, Maroc, Nov. 2020.
Reviewer
Team members have been reviewers for several conferences, including the most prestigious ones in their research area: IFAC World Congress 2020, CDC2020, ACC 2021
10.1.3 Journal
Member of the editorial boards
C. Canudas de Wit is Senior Editor of IEEE Transactions on Control of Network Systems and Editor of the Asian Journal of Control.
P. Frasca is Associate Editor of the Asian Journal of Control and of the IEEE Control Systems Letters.
H. Fourati is Associate Editor of the Asian Journal of Control.
Reviewer - reviewing activities
Team members have been reviewers for several journals, including the most prestigious ones in their research area: Automatica, IEEE Transactions on Automatic Control, IEEE Transactions on Control of Network Systems, IEEE Transactions on Network Science and Engineering, IEEE Control Systems Letters, Asian Journal of Control, SIAM Journal of Applied Mathematics, Transportation Research Part B and Part C, IEEE Transactions on Intelligent Transportation Systems, IEEE Transaction on Vehicular Technology, Physica A.
10.1.4 Invited talks
M. L. Delle Monache gave the following invited talks during 2020:
- Modeling for mixed autonomy traffic: a control-based approach, Workshop on large scale autonomy: connectivity and mobility networks, IPAM (UCLA), USA, November 2020
- Coupled PDE-ODE systems: applications to traffic flow modeling, estimation and control, 42nd workshop of research center for complex systems and network sciences, Southeastearn university, China, September 2020
- Coupled PDE-ODE systems: applications to traffic flow modeling, estimation and control, Journée de l'équipe EMS, Université d'Orléans, France, February 2020
A. Kibangou gave a talk at GDR MACS for COVID Initiative on July 7, 2020.
M. U. B. Niazi gave the following invited talk
- Modeling and Control of COVID-19 Epidemic through Testing Policies, the International e-Seminar on Control and Systems Theory, TU Kaiserslautern, Germany, November 2020.
P. Frasca gave the following invited talks during 2020:
- “Traffic Flow on a Ring with a Single Autonomous Vehicle: An Interconnected Stability Perspective”, Southeast University, Nanjing, China, September 4, 2020
- “The closed loop between opinion formation and personalised recommendations”, Peking University, Beijing, China, July 21, 2020
10.1.5 Leadership within the scientific community
Team members participate to the following technical committees of IEEE Control Systems Society and of the International Federation of Automatic Control:
- IEEE-CSS Technical Committee “Networks and Communications Systems” (P. Frasca and F. Garin);
- IFAC Technical Committee 1.5 on Networked Systems (P. Frasca and C. Canudas de Wit);
- IFAC Technical Committee 2.5 on Robust Control (P. Frasca);
- IFAC Technical Committee 9.2 on Human Impact of Automation (P. Frasca);
- IFAC Technical Committee 7.1 Automotive Control (C. Canudas de Wit);
- IFAC Technical Committee 7.4 Transportation systems (C. Canudas de Wit).
P. Frasca is a member of the steering committee of the GdR MACS (body coordinating national activities in Automatic Control in France), 2019–2023, and C. Canudas de Wit is member of the board of SAGIP (Société d'Automatique, de Génie Industriel et de Productique).
10.1.6 Scientific expertise
F. Garin was a member of the recruiting committee for researchers at Inria Grenoble–Rhône-Alpes.
10.1.7 Research administration
F. Garin is `responsable du pôle automatique et diagnostic’ at GIPSA-lab, since Jan 2020 and `Présidente du CES (Comité des Emplois Scientifiques) du Centre Inria Grenoble–Rhône-Alpes’, since July 2019. She is also `co-responsable de l'axe CPS (Cyber-Physical Systems)' of Persyval2, since Nov. 2019.
C. Canudas de Wit is a member of the COST-Inria-RA (Conseil d’Orientation Scientifique et Technologique, Inria Rhône-Alpes), since 2017, and an elected member of the `Commission d'Évaluation Inria' since 2020.
M.L. Delle Monache is member of two local committees at Inria Grenoble Rhône-Alpes: Commission de développement technologique (research engineers) and Comité des Études Doctorales (PhD grants CORDI-S).
H. Fourati is an elected member of CNU61 (Conseil National des Universités, Génie informatique, Automatique et Traitement du Signal).
A. Kibangou is an elected member of "Conseil du pôle MSTIC" at Univ. Grenoble Alpes.
10.2 Teaching - Supervision - Juries
10.2.1 Teaching
- Master: F. Garin, Distributed Algorithms and Network Systems, 13.5h, M2, Univ. Grenoble Alpes, France.
- Licence: H. Fourati, Mathématiques, 30h, L2, IUT1 (GEII1), Univ. Grenoble Alpes, France.
- Licence: H. Fourati, Informatique Industrielle, 111h, L1, IUT 1 (GEII), Univ. Grenoble Alpes, France.
- Licence: H. Fourati, Réseaux locaux industriels, 34h, L2, IUT1 (GEII), Univ. Grenoble Alpes, France.
- Licence: H. Fourati, Automatique, 39h, L3, UFR physique, Univ. Grenoble Alpes, France.
- Licence: H. Fourati, Automatique continue et discrete, 27h, L2, IUT1 (GEII), Univ. Grenoble Alpes, France.
- Master: H. Fourati, Perception and states estimation for mobile robotics, 14h, M2, Grenoble-INP ENSE3.
- Licence: A. Kibangou, Automatique, 75h, L2, IUT1(GEII), Univ. Grenoble Alpes, France.
- Licence: A. Kibangou, Mathématiques, 44h, L2, IUT1 (GEII), Univ. Grenoble Alpes, France.
- Licence: A. Kibangou, Mathématiques, 126h, L1, IUT1 (GEII), Univ. Grenoble Alpes, France.
- Master: A. Kibangou, Automatique-Préparation à l'aggrégation, 6h, M2, Ministère de l'education nationale-Académie de Grenoble, France.
10.2.2 Supervision
- PhD: Nicolas Martin, Network partitioning algorithms with scale-free objective, Univ. Grenoble Alpes, Feb. 2020, co-advised by C. Canudas de Wit and P. Frasca.
- PhD: Stéphane Mollier, Two-dimensional macroscopic models for large scale traffic networks, Univ. Grenoble Alpes, Feb. 2020, co-advised by C. Canudas de Wit, M. L. Delle Monache and B. Seibold.
- PhD in progress: Tarso Kraemer Sarzi Sartori, Mitigation des effets du rayonnement cosmique dans les algorithmes d'estimation d'attitude de systèmes de navigation inertielle, from Oct. 2020, co-advised by R. Possamai Bastos and H. Fourati.
- PhD in progress: Nigina Toktassynova, Simulation and research of industrial flow control systems of the enterprise based on MES systems, from Sep. 2016, co-advised by B. Suleimenov and H. Fourati.
- PhD in progress: Martin Rodriguez-Vega, Traffic density, traveling time and vehicle emission estimation in large-scale traffic networks, from Oct. 2017, co-advised by C. Canudas de Wit and H. Fourati.
- PhD in progress: Muhammad Umar B. Niazi, State-state estimation design and optimal sensor placement algorithms for large-scale evolutionary dynamical networks, from Dec. 2017, co-advised by C. Canudas de Wit and A. Kibangou.
- PhD in progress: Thembani Moyo, Origin and destination modeling and estimation for smart mobility, from May 2018, co-advised by A. Kibangou and W. Musakwa (Univ. of Johannesburg).
- PhD in progress: Denis Nikitin, Scalable large-scale control of network aggregates, from Sept. 2018, co-advised by C. Canudas de Wit and P. Frasca.
- PhD in progress: Liudmila Tumash, Traffic control in large-scale urban networks, from Sept. 2018, co-advised by C. Canudas de Wit and M. L. Delle Monache.
- PhD in progress: Bassel Othman, Dynamic optimization of road traffic in a large-scale urban network from Oct. 2018, co-advised by C. Canudas de Wit and G. De Nunzio.
- PhD in progress: Makia Zmitri, Estimating the attitude by IMU, magnetic and vision measures: an automatic control approach, from Oct. 2018, co-advised by H. Fourati and C. Prieur.
- PhD in progress: Ujjwal Pratap, Resilient control in scale-free networks, from Feb. 2019, co-advised by C. Canudas-de-Wit, F. Garin, and H. Sandberg (KTH Stockholm).
- PhD in progress: Renato Vizuete, Open Multi-Agent Systems, from Sept. 2019, co-advised with Elena Panteley
- PhD in progress: Maria Castaldo, Disorders of online media, from Nov. 2019, co-advised with Tommaso Venturini (Centre Internet et Société, CNRS)
- PhD in progress: Nomfundo Cele, Perception of Quality of Service on public transportation in developing countries, from November 2020, co-advised by A. Kibangou and W. Musakwa (Univ. of Johannesburg).
10.2.3 Juries
- P. Frasca was external referee for the Ph.D. defense of Francesco Sasso, University of Salento, Lecce, Italy (Ph.D. advisors: Giuseppe Notarstefano and Angelo Coluccia), 2020
10.3 Popularization
10.3.1 Articles and contents
Article on “Le Journal du CNRS” on online behaviors during COVID-19 lock-down, 2020
11 Scientific production
11.1 Major publications
- 1 articleThe Observability Radius of NetworksIEEE Transactions on Automatic Control626June 2017, 3006-3013
- 2 articleEco-Driving in Urban Traffic Networks Using Traffic Signals InformationInternational Journal of Robust and Nonlinear Control262016, 1307--1324
- 3 articleDistributed Source Seeking without Global Position InformationIEEE Transactions on Control of Network Systems51March 2018, 228-238
- 4 book Introduction to Averaging Dynamics over Networks Springer 2017
- 5 bookMultisensor Data Fusion: From Algorithms and Architectural Design to Applications (Book)Series: Devices, Circuits, and Systems, CRC Press, Taylor & Francis Group LLCAugust 2015, 663
- 6 article Input and State Observability of Network Systems with Time-Varying Topology IEEE transactions on control of network systems 2019
- 7 articleObservability in Connected Strongly Regular Graphs and Distance Regular GraphsIEEE Transactions on Control of Network Systems14December 2014, 360-369
- 8 articleEnergy-aware Adaptive Attitude Estimation Under External Acceleration for Pedestrian NavigationIEEE/ASME Transactions on Mechatronics213June 2016, 1366-1375
- 9 articleNash Game Based Distributed Control Design for Balancing of Traffic Density over Freeway NetworksIEEE Transactions on Control of Network Systems322016, 149-161
- 10 articleDissipation of stop-and-go waves via control of autonomous vehicles: Field experimentsTransportation research. Part C, Emerging technologies892018, 205-221
11.2 Publications of the year
International journals
International peer-reviewed conferences
Conferences without proceedings
Reports & preprints
11.3 Cited publications
- 44 articleThe rhythms of the night: increase in online night activity and emotional resilience during the spring 2020 Covid-19 lockdownEPJ Data Science101February 2021, 7URL: https://doi.org/10.1140/epjds/s13688-021-00262-1
- 45 articleDissipation of stop-and-go waves via control of autonomous vehicles: Field experimentsTransportation Research Part C: Emerging Technologies892018, 205--221
- 46 articleTraffic jams without bottlenecks—experimental evidence for the physical mechanism of the formation of a jamNew journal of physics1032008, 033001