
Keywords
Computer Science and Digital Science
- A1.2.6. Sensor networks
- A1.3. Distributed Systems
- A2.3. Embedded and cyber-physical systems
- A2.5.2. Component-based Design
- A4.4. Security of equipment and software
- A4.5. Formal methods for security
- A5.1.4. Brain-computer interfaces, physiological computing
- A5.9.2. Estimation, modeling
- A5.10.5. Robot interaction (with the environment, humans, other robots)
- A6.1.1. Continuous Modeling (PDE, ODE)
- A6.3.2. Data assimilation
- A6.4.1. Deterministic control
- A6.4.6. Optimal control
Other Research Topics and Application Domains
- B1.1.9. Biomechanics and anatomy
- B1.2.1. Understanding and simulation of the brain and the nervous system
- B2.2.1. Cardiovascular and respiratory diseases
- B2.2.2. Nervous system and endocrinology
- B2.2.6. Neurodegenerative diseases
- B2.5.1. Sensorimotor disabilities
- B2.5.3. Assistance for elderly
1 Team members, visitors, external collaborators
Research Scientists
- Christine Azevedo Coste [Team leader, Inria, Senior Researcher, HDR]
- Francois Bailly [Inria, Researcher, from Oct 2021]
- François Bonnetblanc [Inria, Researcher, HDR]
- Charles Fattal [USSAP Perpignan, Researcher, Medical Doctor in Physical Medicine, HDR]
- Thomas Guiho [Inria, Starting Research Position]
- David Guiraud [Inria, Senior Researcher, HDR]
- Benoît Sijobert [Institut Saint Pierre]
Post-Doctoral Fellows
- Lucas Oliveira Da Fonseca [Inria]
- Fernanda Rodrigues Ferreira Lopes [Univ de Montpellier, from Oct 2021]
- Thekla Stefanou [Inria]
PhD Students
- Vincent Iampietro [Univ de Montpellier, until Sep 2021]
- Ronan Le Guillou [Centre hospitalier universitaire de Toulouse]
- Helene Moron [Centre hospitalier universitaire de Nîmes]
- Felix Schlosser-Perrin [Univ de Montpellier, from Sep 2021]
- Clement Trotobas [Inria]
- Lucie William [Inria]
Technical Staff
- Arthur Hiairrassary [Neurinnov, Engineer, from Mar 2021 until Sep 2021]
- Olivier Rossel [Inria, Engineer, from Sep 2021]
Interns and Apprentices
- Rodolfo Bettencourt Pereira Cerqueira [Université du Minho - Portugal, until Mar 2021]
- Sam Durand [Inria, from Feb 2021 until Jul 2021]
- Marie Ghekiere [Inria, from Aug 2021]
- Luis Miguel Marques Martins [Université du Minho - Portugal, until Mar 2021]
- Mylene Pistre [Inria, from Apr 2021 until Aug 2021]
- Felix Schlosser-Perrin [Institut du Cerveau et de la Moelle Epinière, from Mar 2021 until Aug 2021]
- Clotilde Turpin [Inria, from Apr 2021 until Aug 2021]
Administrative Assistant
- Annie Aliaga [Inria]
Visiting Scientists
- Nadia Nasri [Université d'Alicante-Espagne, until Apr 2021]
- Fernanda Rodrigues Ferreira Lopes [Universidade Federal de Minas Gerais - Brésil, until Sep 2021]
2 Overall objectives
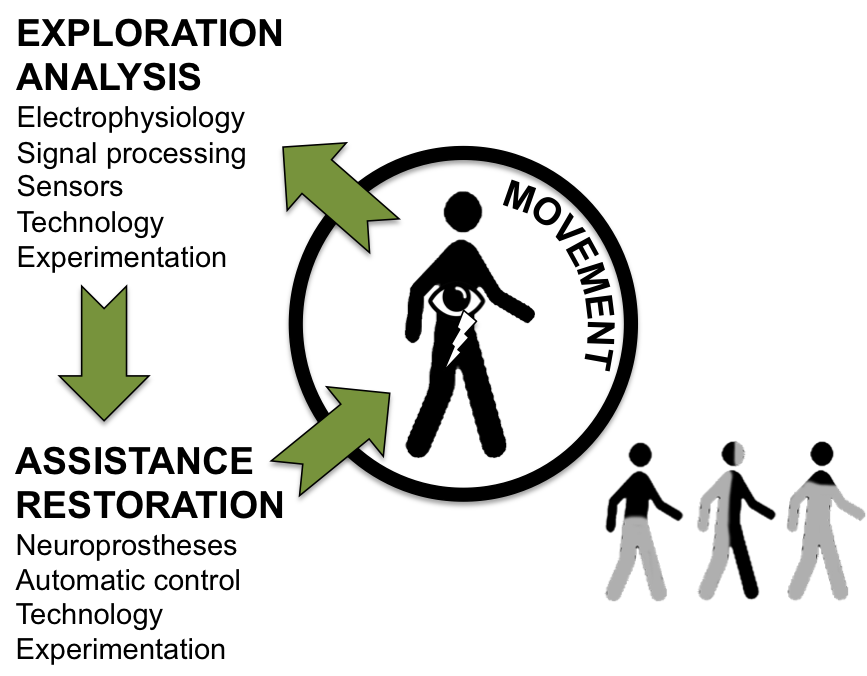
CAMIN research team is dedicated to the design and development of realistic neuroprosthetic solutions for sensorimotor deficiencies in collaboration with clinical partners. Our efforts are focused on clinical impact: improving the functional evaluation and/or patients quality of life. Movement is at the center of our investigative activity, and the exploration and understanding of the origins and control of movement are one of our two main research priorities. Indeed, optimizing the neuroprosthetic solutions depends on a deeper understanding of the roles of the central and peripheral nervous systems in motion control. The second research priority is movement assistance and/or restoration. Based on the results from our first research focus, neuroprosthetic approaches are deployed (Figure 1).
Electrical stimulation (ES) is used to activate muscle contractions by recruiting muscle fibers, just as the action potentials initiated in motoneurons would normally do. When a nerve is stimulated, both afferent (sensitive) and efferent (motor) pathways are excited. ES can be applied externally using surface electrodes positioned on the skin over the nerves/muscles intended to be activated or by implantation with electrodes positioned at the contact with the nerves/muscles or neural structures (brain and spinal cord). ES is the only way to restore movement in many situations.
Although this technique has been known for decades, substantial challenges remain, including: (i) detecting and reducing the increased early fatigue induced by artificial recruitment, (ii) finding solutions to nonselective stimulation, which may elicit undesired effects, and (iii) allowing for complex amplitude and time modulations of ES in order to produce complex system responses (synergies, coordinated movements, meaningful sensory feedback, high-level autonomic function control).
We investigate functional restoration, as either a neurological rehabilitation solution (incomplete spinal cord injury (SCI), hemiplegia) or for permanent assistance (complete SCI). Each of these contexts imposed its own set of constraints on the development of solutions.
Functional ES (FES) rehabilitation mainly involves external FES, with the objective to increase neurological recuperation by activating muscle contractions and stimulating both efferent and afferent pathways. Our work in this area naturally led us to take an increasing interest in brain organization and plasticity, as well as central nervous system (brain, spinal cord) responses to ES. When the objective of FES is a permanent assistive aid, invasive solutions can be deployed. We pilot several animal studies to investigate neurophysiological responses to ES and validate models. We also apply some of our technological developments in the context of human per-operative surgery, including motor and sensory ES.
Camin research is focused on exploring and understanding human movement in order to propose neuroprosthetic solutions in sensorimotor deficiency situations to assist or restore movement. Exploration and understanding of human movement will allow us to propose assessment approaches and tools for diagnosis and evaluation purposes, as well as to improve FES-based solutions for functional assistance.
We have chosen not to restrict our investigation spectrum to specific applications but rather to deploy our general approach to a variety of clinical applications in collaboration with our medical partners. Our motivation and ambition is to have an effective clinical impact.
3 Research program
3.1 Exploration and understanding of the origins and control of movement
One of Camin’s areas of expertise is motion measurement, observation and modeling in the context of sensorimotor deficiencies. The team has the capacity to design advanced protocols to explore motor control mechanisms in more or less invasive conditions in both animal and human.
Human movement can be assessed by several noninvasive means, from motion observation (MOCAP, IMU) to electrophysiological measurements (afferent ENG, EMG, see below). Our general approach is to develop solutions that are realistic in terms of clinical or home use by clinical staff and/or patients for diagnosis and assessment purposes. In doing so, we try to gain a better understanding of motor control mechanisms, including deficient ones, which in turn will give us greater insight into the basics of human motor control. Our ultimate goal is to optimally match a neuroprosthesis to the targeted sensorimotor deficiency.
The team is involved in research projects including:
-
Peripheral nervous system (PNS) exploration, modeling and electrophysiology techniques
Electroneurography (ENG) and electromyography (EMG) signals inform about neural and muscular activities. The team investigates both natural and evoked ENG/EMG through advanced and dedicated signal processing methods. Evoked responses to ES are very precious information for understanding neurophysiological mechanisms, as both the input (ES) and the output (evoked EMG/ENG) are controlled. Camin has the expertise to perform animal experiments (rabbits, rats, earthworms and big animals with partners), design hardware and software setups to stimulate and record in harsh conditions, process signals, analyze results and develop models of the observed mechanisms. Experimental surgery is mandatory in our research prior to invasive interventions in humans. It allows us to validate our protocols from theoretical, practical and technical aspects.
-
Central nervous system (CNS) exploration
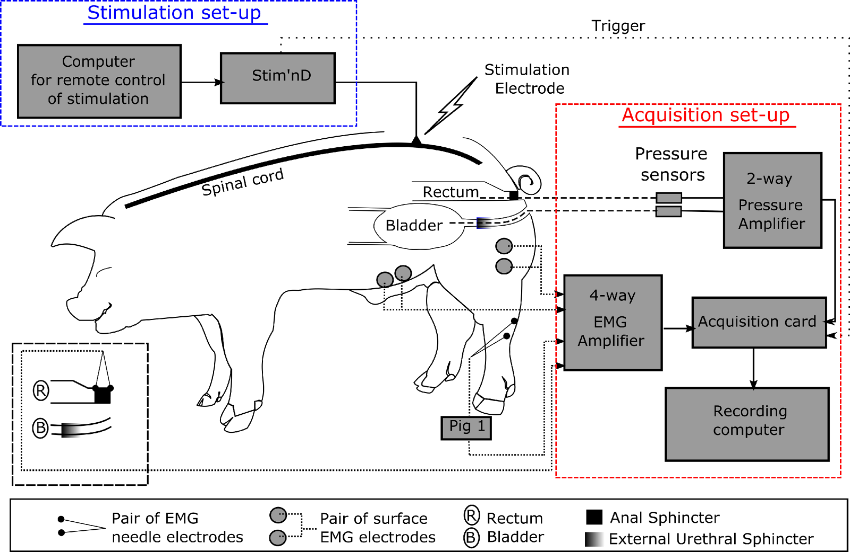
Stimulating the CNS directly instead of nerves allows activation of the neural networks responsible for generating functions. Once again, if selectivity is achieved the number of implanted electrodes and cables would be reduced, as would the energy demand. We have investigated spinal electrical stimulation in animals (pigs) for urinary track and lower limb function management. This work is very important in terms of both future applications and the increase in knowledge about spinal circuitry. The challenges are technical, experimental and theoretical, and the preliminary results have enabled us to test some selectivity modalities through matrix electrode stimulation. This research area will be further intensified in the future as one of ways to improve neuroprosthetic solutions.
We intend to gain a better understanding of the electrophysiological effects of Direct Electrical Stimulation (DES) through electroencephalographic (EEG) and electrocorticographic (ECoG) recordings in order to optimize anatomo-functional brain mapping, better understand brain dynamics and plasticity, and improve surgical planning, rehabilitation, and the quality of life of patients.
-
Muscle models and fatigue exploration
Muscle fatigue is one of the major limitations in all FES studies. Simply, the muscle torque varies over time even when the same stimulation pattern is applied. As there is also muscle recovery when there is a rest between stimulations, modeling the fatigue is almost an impossible task. Therefore, it is essential to monitor the muscle state and assess the expected muscle response by FES to improve the current FES system in the direction of greater adaptive force/torque control in the presence of muscle fatigue.
-
Movement interpretation
We intend to develop ambulatory solutions to allow ecological observation. We have extensively investigated the possibility of using inertial measurement units (IMUs) within body area networks to observe movement and assess posture and gait variables. We have also proposed extracting gait parameters like stride length and foot-ground clearance for evaluation and diagnosis purposes.
3.2 Movement assistance and/or restoration
The challenges in movement restoration are: (i) improving nerve/muscle stimulation modalities and efficiency and (ii) global management of the function that is being restored in interaction with the rest of the body under voluntary control. For this, both local (muscle) and global (function) controls have to be considered.
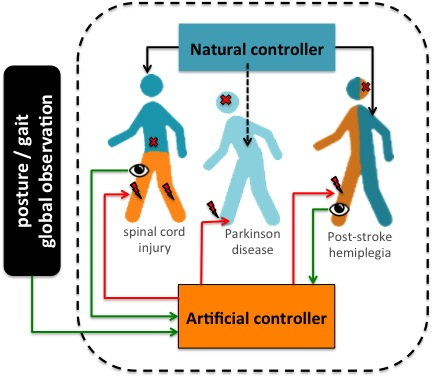
Online modulation of ES parameters in the context of lower limb functional assistance requires the availability of information about the ongoing movement. Different levels of complexity can be considered, going from simple open-loop to complex control laws (Figure 2).
Real-time adaptation of the stimulation patterns is an important challenge in most of the clinical applications we consider. The modulation of ES parameters to adapt to the occurrence of muscular fatigue or to environement changes needs for advanced adaptive controllers based on sensory information. A special care in minimizing the number of sensors and their impact on patient motion should be taken.
4 Application domains
4.1 Movement Assistance
CAMIN develops neuroprosthetic solutions dedicated to restore or assist movements of paralyzed limbs. Among the considered functions we can cite: pedalling, grasping, walking. Different users are considered: individuals with post-stroke hemiplegia, people with spinal cord lesions, persons with Parkinson disease.
We have also started to develop skills in orthosis design.
4.2 Movement Analysis
For the purpose of assisting movement, CAMIN has developped an important expertise in movement interpretation using a large range of sensors: inertial measurement units, MOCAP systems, encoders, goniometers... Various Classification methods are used depending on the objective.
This knowledge is applied in other applications than movement assistance, like in MEDITAPARK project were we developped an application (PARAKEET) embedded in a smartwatch to monitor hand tremor in persons with parkinson disease.
4.3 Evoked electrophysiology
CAMIN develops solutions to trigger, record and process electrophysiological signals evoked by electrical stimulation applied to various neural tissues. These evoked responses are used to control the activity of the excitable tissue, to probe its electrophysiological status for diagnostic purposes and to investigate the conductivity/connectivity between the stimulation and the recording sites (electrophysiological mapping).
These neural engineering procedures can be applied to muscle, nerve, spinal cord and brain, in animals and humans.
For instance, electrical stimulations can be applied externally and non-invasively on muscles to induce muscle contractions as well as invasively on the human brain in order to guide neurosurgeries.
5 Social and environmental responsibility
5.1 Impact of research results
CAMIN research is clearly dedicated to applications which intend to improve quality of life and/or self esteem of individuals with sensori-motor deficiencies.
We give a very important place to ethics of our work. Christine Azevedo is a member of INRIA ethical committee INRIA.
6 Highlights of the year
- An agreement has been signed for Charles Fattal (medical doctor at USSAP Perpignan) and Benoît Sijobert (HumanLab Manager ISP Palavas) who are now officially attached to the team.
- François Bailly obtained a permanent position as Research Scientist in CAMIN team.
- Thomas Guiho obrained an INRIA Starting Research Position in the team for 3 years.
7 New software and platforms
Let us describe new software/platforms.
7.1 New software
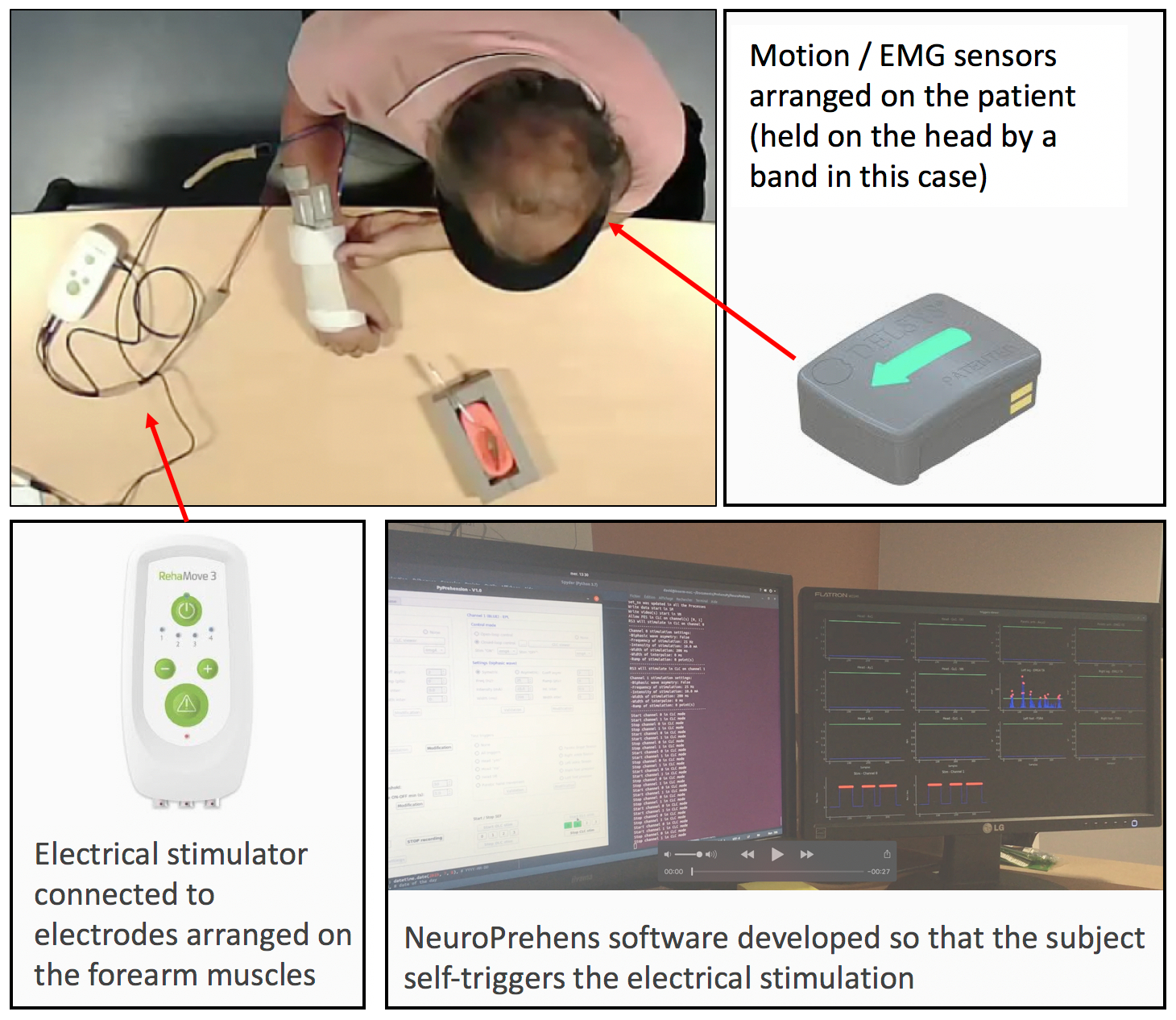
7.1.1 NeuroPrehens
-
Keywords:
Python, Qt, GUI (Graphical User Interface), Medical, Medical applications, Real-time application
-
Functional Description:
Python application using a framework of input as EMG, IMU, Foot switchs, Camera etc. for controlling a Functional Electrical Stimulation neuroprosthesis in real time closed loop for prehension restoration in hemiplegic stroke patients.
-
Contact:
Christine Azevedo Coste
-
Participants:
David Gasq, Ronan Le Guillou, Christine Azevedo Coste
-
Partner:
CHU de Toulouse
7.1.2 IMUSEF
-
Keywords:
Inertial module unit, Movement analysis, Software platform, Embedded systems
-
Scientific Description:
Modular embedded framework for real-time control of Functional Electrical Stimulation in closed loop with sensor feedback.
-
Functional Description:
IMUSEF allows to acquire data from inertial sensors in order to estimate a segment orientation or a joint angle. From this, an event can be defined to be used to control an electrical stimulator.
-
Release Contributions:
1.0 : First fully functional version application focused with stimulator control, sensor data acquisition and analysis and decisional algorithm (https://www.mdpi.com/545320). 2.0 : Full rework as a modular framework, allowing selection of decisional algorithm, stimulator system, sensors etc. and optional communication and control in real time from a remote fully featured Graphical User Interface through autonomous hotspot wifi.
-
News of the Year:
New major version (2.0).
- URL:
- Publication:
-
Contact:
Christine Azevedo Coste
-
Participants:
Benoît Sijobert, Ronan Le Guillou, Christine Azevedo Coste, Martin Schmoll
-
Partner:
Université de Montpellier 2
7.1.3 ID-IMU
-
Name:
Intention Decoder based on IMU
-
Keywords:
Inertial module unit, Classification, Movement analysis, Recognition of human movement, Artificial intelligence
-
Scientific Description:
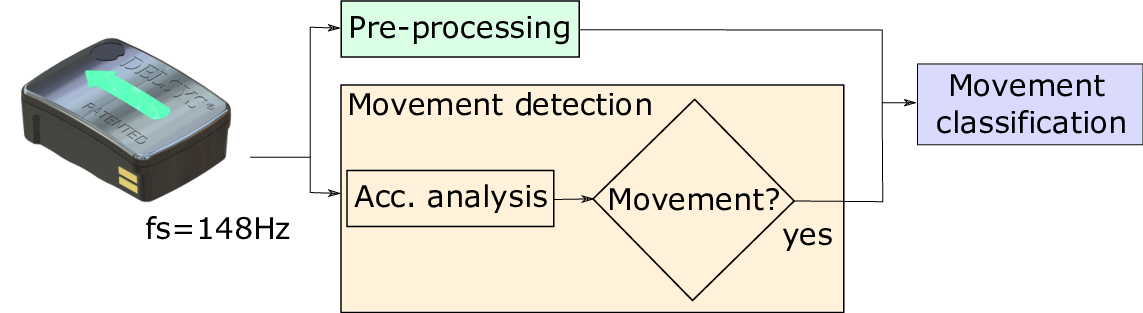
The software process IMU data (accelerometer and gyroscope, 3 axes each) by differentiating it at each new data point, and band-pass filtering it. Then, in a moving window fashion, it extract the following features: rms (root mean square), average, and psd (power spectrum density). Finally, it uses these features as input for training or classifying detected movements. Movements are detected based on a threshold applied to the resultant movement data in the window. The classifier is a nu-SVM (nu-support vector machine) with linear kernel. Most parameters are editable in the parameters.json file.
-
Functional Description:
Users can wear movement sensors (IMUs) on different parts of their bodies and train the system to identify specific and arbitrary movements. These can then be used to activate or trigger other devices, such as neuroprostheses, or robots. As is, this software can read and classify movement data stored in files according to the AGILIS standards by the time of its publication. The real time reading of sensor data and device actuation is out of scope.
-
Release Contributions:
This versions adds a feature for saving data at intermediate steps, in addition to the final classification results.
- URL:
-
Contact:
Christine Azevedo Coste
-
Participants:
Lucas Oliveira Da Fonseca, Christine Azevedo Coste
7.1.4 ANT4ROTOR
-
Name:
ANT+ communication for Rotor 2INPOWER
-
Keywords:
Motion analysis, Communicating devices, Power monitoring, Monitoring
-
Functional Description:
Based on the ANT+ communication protocol's Python library, this project unlocks the low frequency limits (4Hz) from the default ANT+ protocol to allow acquisition of the ROTOR "Fast Mode" data streaming (50Hz) through ANT+. This enables data acquisition and monitoring of crank angle, cadence, average power, torque applied on the left and right side independently and more, at frequencies sufficient to analyse the pedalling dynamics inside of a turn rather than having a simple overview of it.
-
Release Contributions:
Version 1 : Complete and functional project. Tested on ROTOR 2INPOWER only, with a RPI 3B.
- URL:
-
Contact:
Christine Azevedo Coste
-
Participants:
Martin Schmoll, Ronan Le Guillou, Christine Azevedo Coste
7.2 New platforms
7.2.1 Exofinger: an orthotic solution to restore key-grip function in a user with tetraplegia
Participants: Marie Ghekiere, Clément Trotobas, Christine Azevedo, Benoît Sijobert, Christophe Braillon [SED Grenoble], Roger Pissard-Gibollet [SED Grenoble], Laurence Boissieux [SED Grenoble].
In 2020, we participated to the Fabrikarium 2020 organized by My Human Kit1 and Ariane Group. A Fabrikarium is a 3-day prototyping workshop dedicated to disabilities that brings together 9 people around a project holder with a disability2. The EXOFINGER project aimed at developping a hand orthosis for the project holder: a user with complete C6 tetraplegia who expressed the need to grasp objects in key grip.
During the event, two prototypes were produced. Both were cable driven and worked on the same principle: when a button is activated, the control unit triggers the linear motor. The linear motor pulls or releases a cable connected to the thumb, closing the grasp. One of the prototypes was made of a custom made textile glove; the cable passes through a sheath and then through sleeves on the glove. For this, a DC motor coupled with a V-coil placed on the forearm of the user wind a nylon cable attached to his thumb (fig. 3). This causes a tension on his thumb which closes on his index finger.
We have continued to improve the Exofinger orthosis within the Exploratory Action HumanLab Inria3.

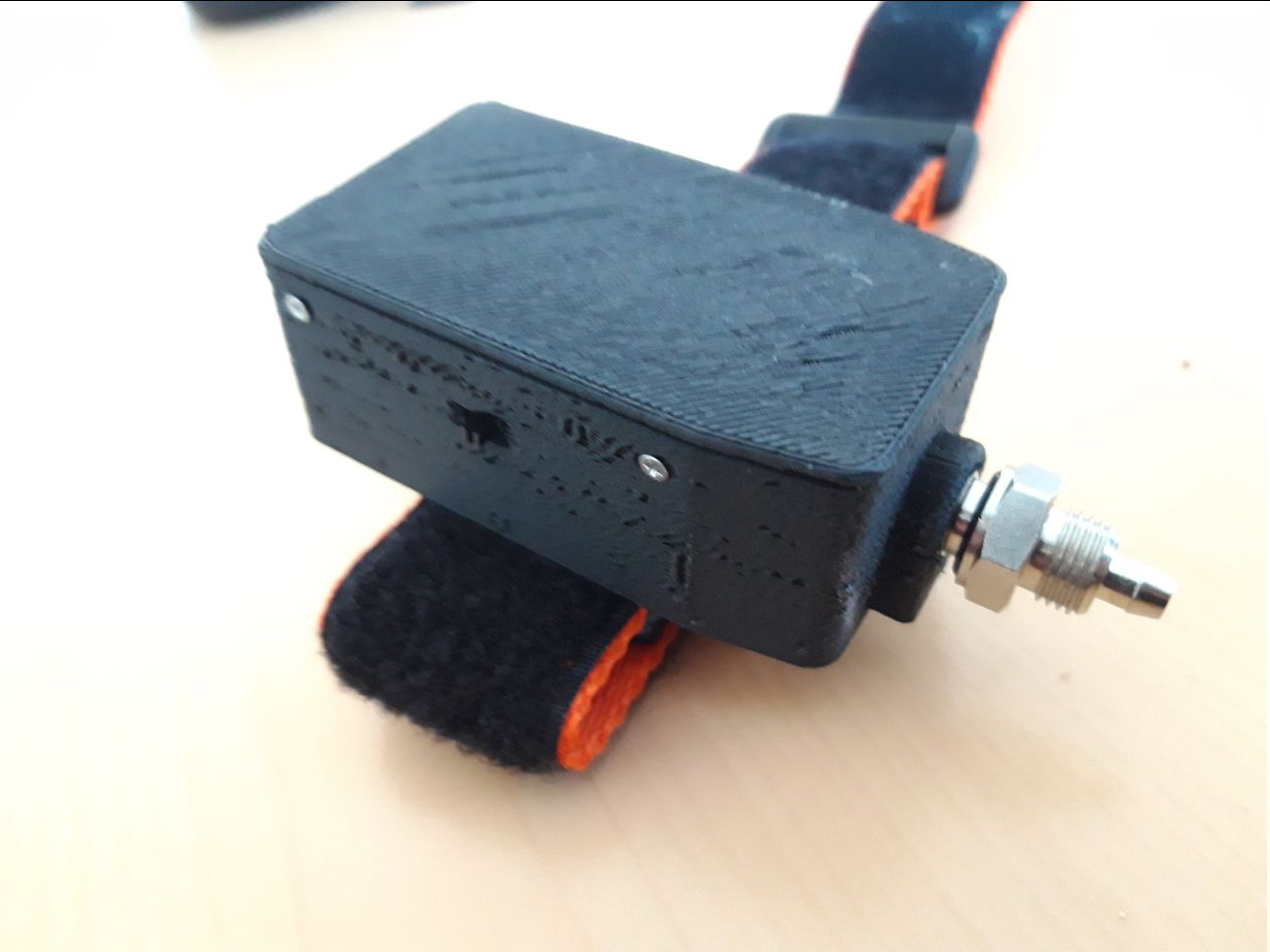
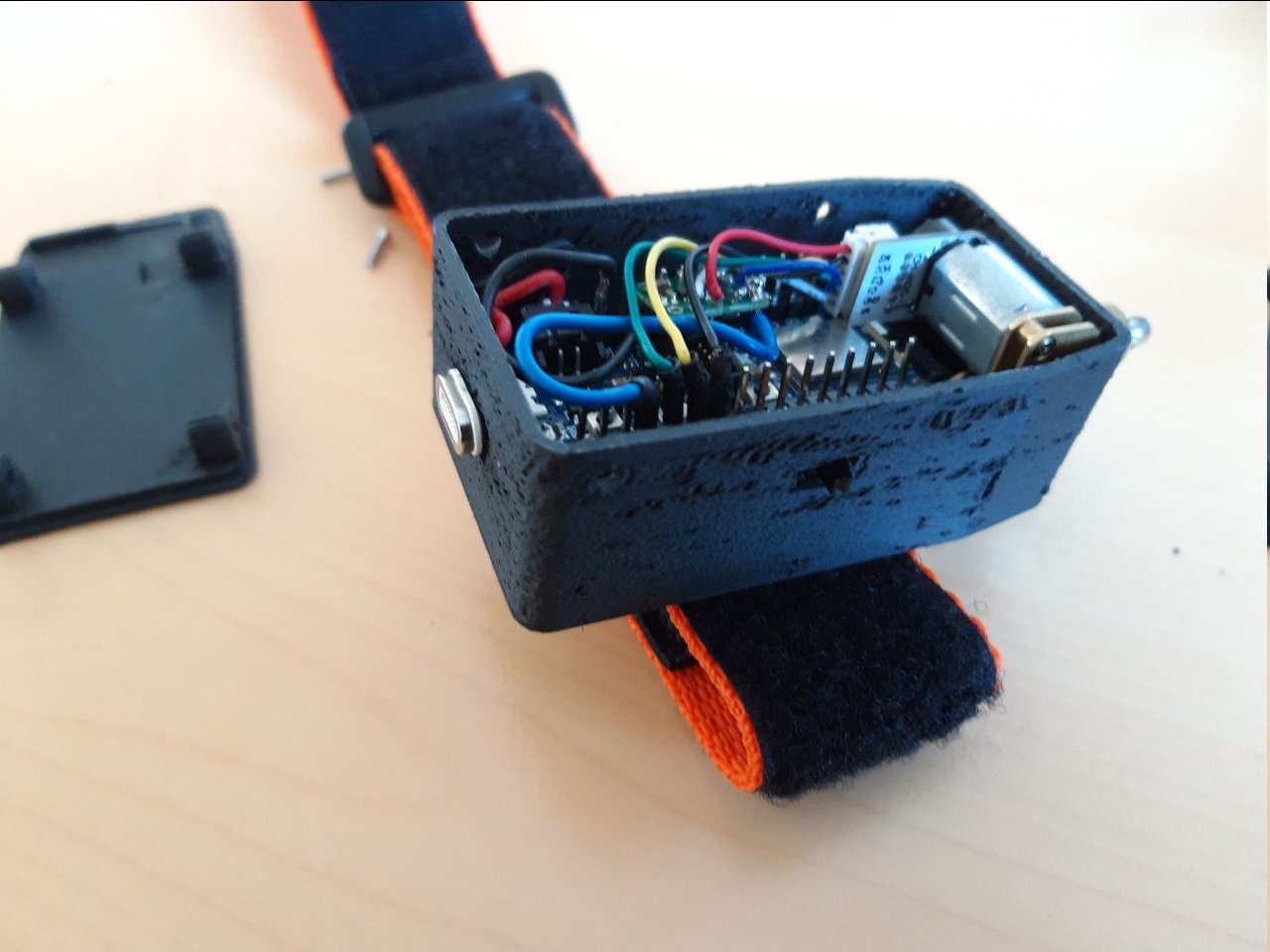
The improvements made are mainly mechanical to increase the thumb-tightening stroke and make the prototype more usable on a day-to-day basis (wireless button module, Android App...(fig. 4)).

Moreover, an experimental protocol for the validation of the functional characteristics of the Exofinger orthosis has been developed and submitted to Coerle. We expect to identify the potential users of such a solution and validate the preliminary design.
7.2.2 Monitoring tremor in ecological conditions : PARaKeet
Participants: Ronan Le Guillou, Christine Azevedo, Christian Geny [CHU Montpellier, France], Gregory Baptista [Montpellier Mindfulness Centre, France].
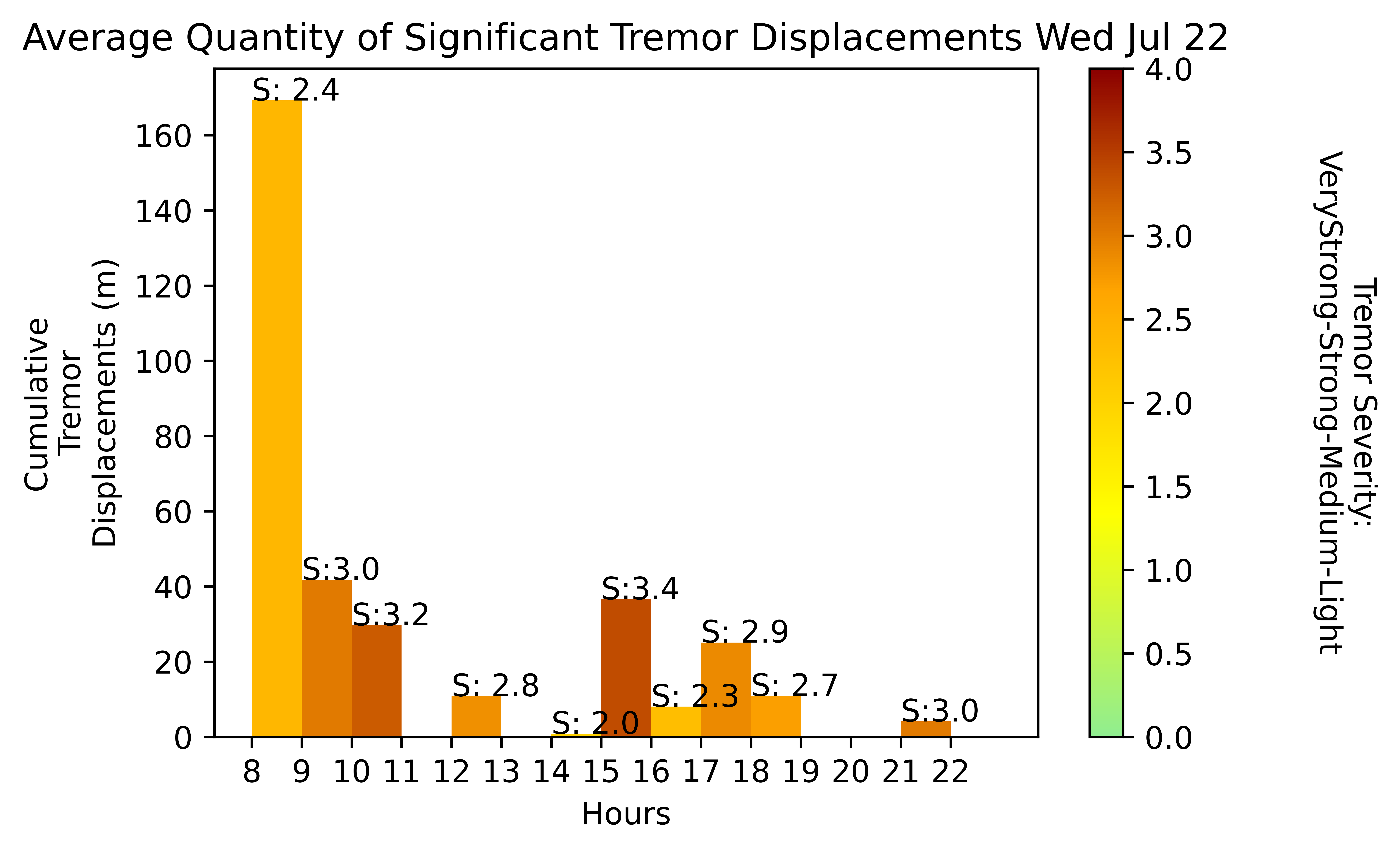
As part of a preliminary study on the effects of Mindfulness meditation on participants with Parkinson’s Disease (PD) (10.3 Partnerships and Cooperations : National Initiatives : LABEX NUMEV - MEDITAPARK ), an application was developed to monitor at home tremor occurrence using a smartwatch Samsung Gear S3 and its newer model, the Samsung Galaxy Watch (fig.5). A Python program has been developed to process and format the recorded data, extract specific features and present the characteristics of the Parkinson tremors under a user friendly and comprehensible format for clinicians. This was finalized this year through a comprehensive rewriting where precision and accuracy of data processing was improved. Furthermore, the ease of use of the automatized data processing and the automatic generation of reports on the patient's detected tremors were completed and improved upon, compared to the previous versions. The goal of this system being to identify Parkinson’s tremors characteristics qualitatively and quantitatively to highlight global tendencies and help objectively determine effectiveness of diverse treatments against PD tremors. This system was tested again and validated through visual confirmation using acquired tremor data coupled to videos of the watch on a volunteering participant. The different levels of tremor severity were calibrated through data/video comparison with the clinical assessment provided by Dr. Christian Geny.
A one day sample of acquisition is presented in a hourly format displaying the evaluation of the quantity of displacement generated by parkinson tremors during each hour as well as the average severity estimation of the related tremors (fig.6). The created system allows the qualification of tremors in punctual clinical check-ups in the Hospital as well as quantitative formatting of daily tendencies. This system should now allow to highlight the evolution of several characteristics from Parkinson’s tremors throughout the MBSR (Mind-fullness Based Stress Reduction) meditation program which has now started in November 2021. This clinical protocol aims to evaluate the impact of Mind-fulness Based Stress Reduction on PD tremors. Acquisition of the data pre-MBSR program was concluded successfully for the first session of the protocol. The ClinicalTrial.gov ID of this protocol is : NCT05168046. The software APP of this platform can be found here as the PARa-Keet Project with the Bil Id: Software_3565.

8 New results
8.1 AGILIS: Implanted multi-contact epineural stimulation to restore hand function in complete upper-limb paralysis.
Participants: Lucie William, Lucas Fonseca, Christine Azevedo, David Guiraud, Charles Fattal, Jacques Teissier [Clinique St Jean Sud de France], Antoine Geffrier [AP-HP Paris, France], Arthur Hiairassary, David Andreu [Neurinnov, France].
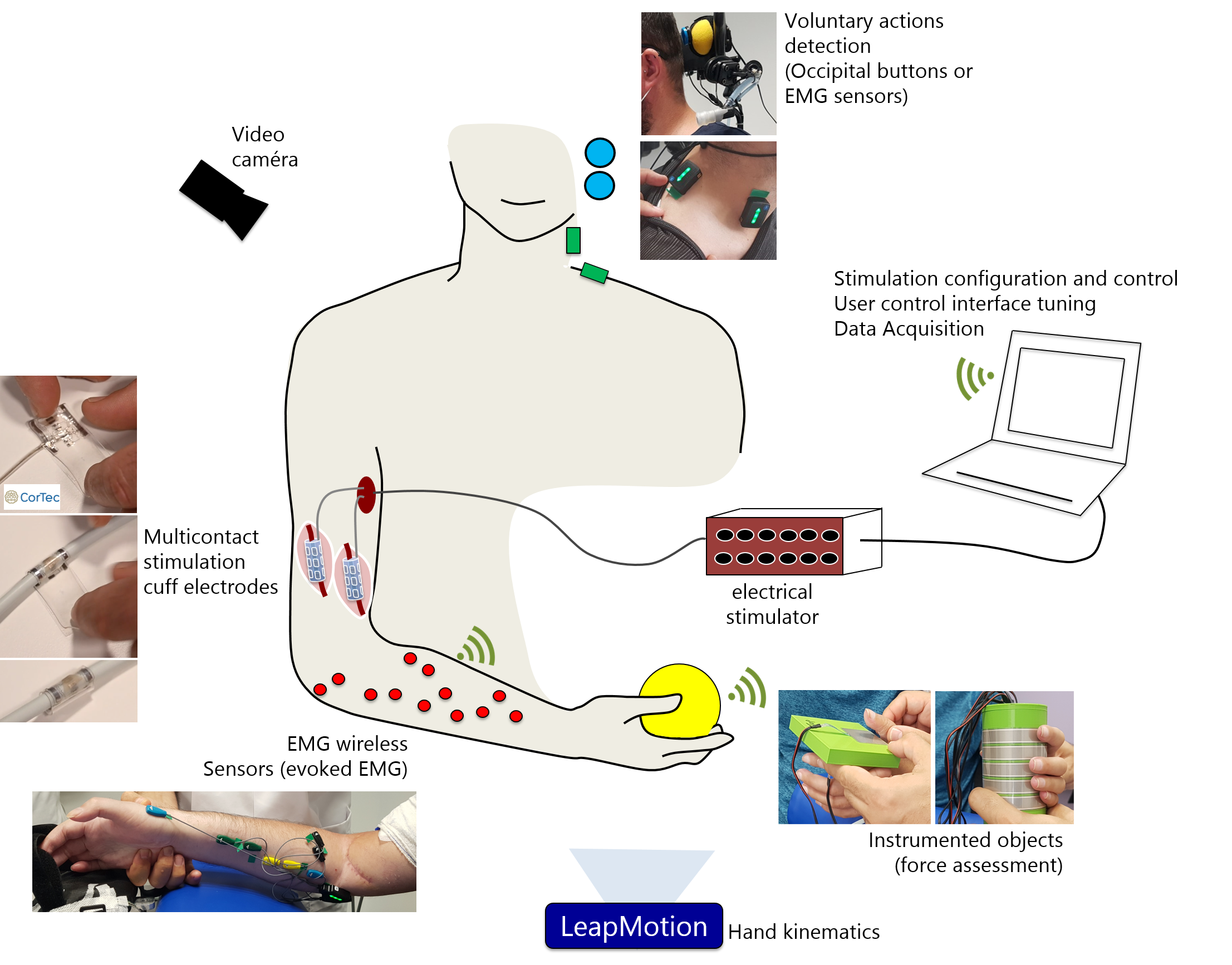
Two multi-contact neural cuff electrodes were placed around radial and median nerves of 2 subjects with high tetraplegia C4, AIS A, group 0 of the International Classification for Surgery of the Hand in Tetraplegia (NCT04306328).The electrodes were maintained during 28 days. The purpose was to study the safety and capability of these electrodes to generate synergistic motor activation and functional movements and to test control interfaces that allow subjects to trigger pre-programmed stimulation sequences. The device consisted of a pair of epineural electrodes and percutaneous cables with two extracorporeal connection cables inserted during a surgical procedure and removed after 28 days (see Fig.7). Continuity tests of the electrodes, selectivity of movements induced, motor capacities for grasping and gripping, conformity of the control order, tolerance and acceptability were assessed. Neither of the 2 participants showed general and local comorbidity. Acceptability was optimal. None of the stimulation configurations generated contradictory movements. The success rate in task execution by the electro-stimulated hand exceeded the target of . The compliance rate of the control orders in both patients was using motion IMU-based detection and using EMG-based detection. These results support the relevance of neural stimulation of the tetraplegic upper limb with a more selective approach, using multi-contact cuff electrodes with 9 and 6 contact points for the median and radial nerve respectively.
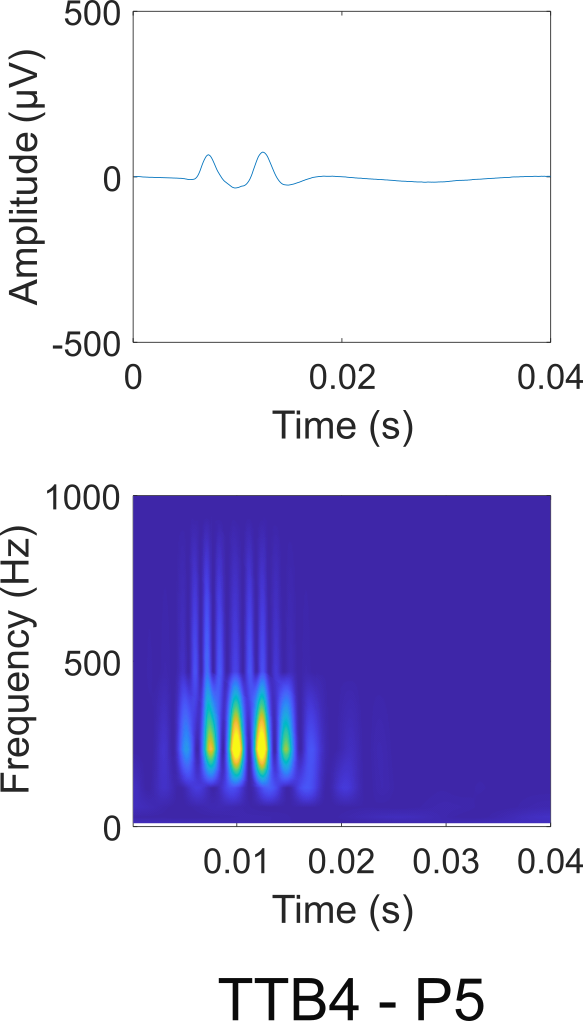
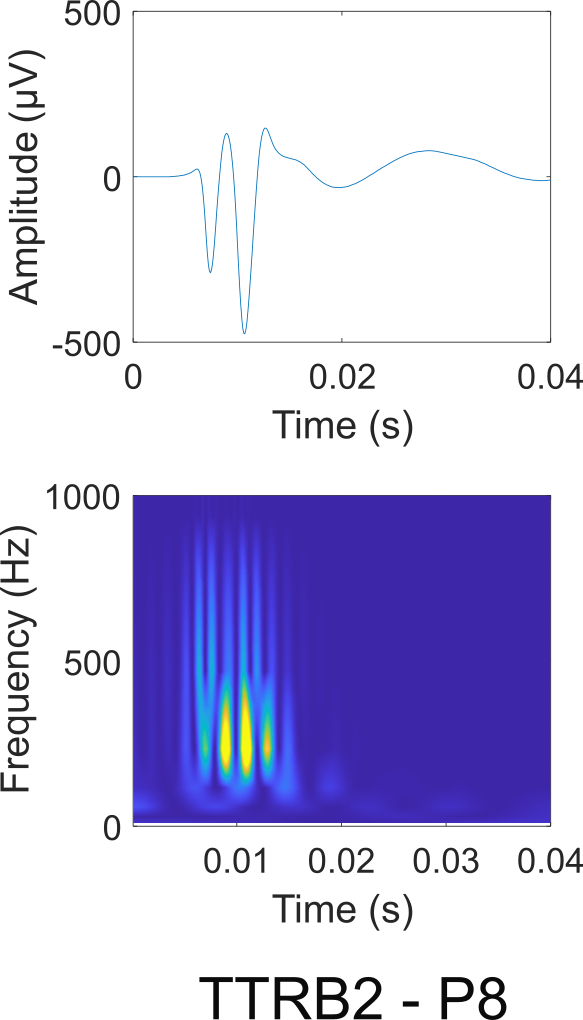
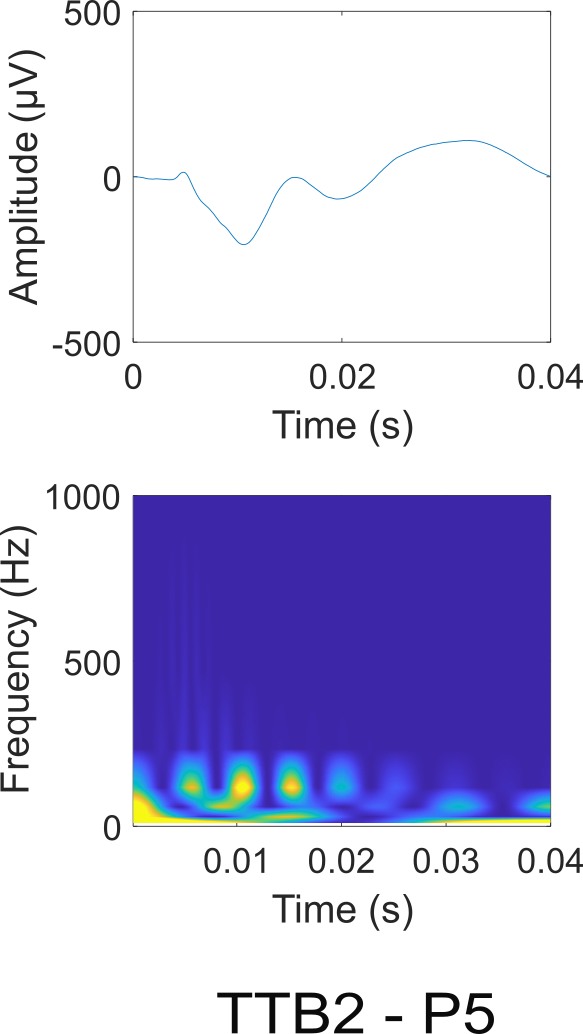
8.1.1 A method based on wavelets to analyze overlapped and dependant M-Waves
Participants: Lucie William, Mélissa Dali, Christine Azevedo, David Guiraud.
Implanted multi-contact epineural stimulation could restore hand movement in patients with complete spinal cord injuries. However, assessing the response by surface evoked EMG recordings wass challenging because the forearm muscles are small and overlapping. Moreover, M-waves were dependent because they were induced by a single stimulation paradigm. We hypothesized that the M-waves of each muscle has a specific time-frequency signature (Fig.8) and we have developed a method to reconstruct the muscle recruitment curves using the energy of this specific time-frequency signature. Orthogonal wavelets are used to analyze individual M-waves. As the selection of the wavelet family and the determination of the time-frequency signature were not trivial, the impact of these choices was evaluated. First, we were able to discriminate the 2 relevant M-waves related to the studied muscles thanks to their specific time-frequency representations. Second, the Meyer family, compared to the Daubechies 2 and 4 families, is the most robust choice against the uncertainty of the time-frequency region definition. Finally, the results are consistent with the semi-quantitative evaluation performed with the Medical Research Council (MRC) scoring. The Meyer wavelet transform combined with the definition of a specific area of interest for each individual muscle allows us to quantitatively and objectively evaluate the evoked EMG in a robust manner.
a - Pure thumb
b - Pure thumb
c - Pure fingers
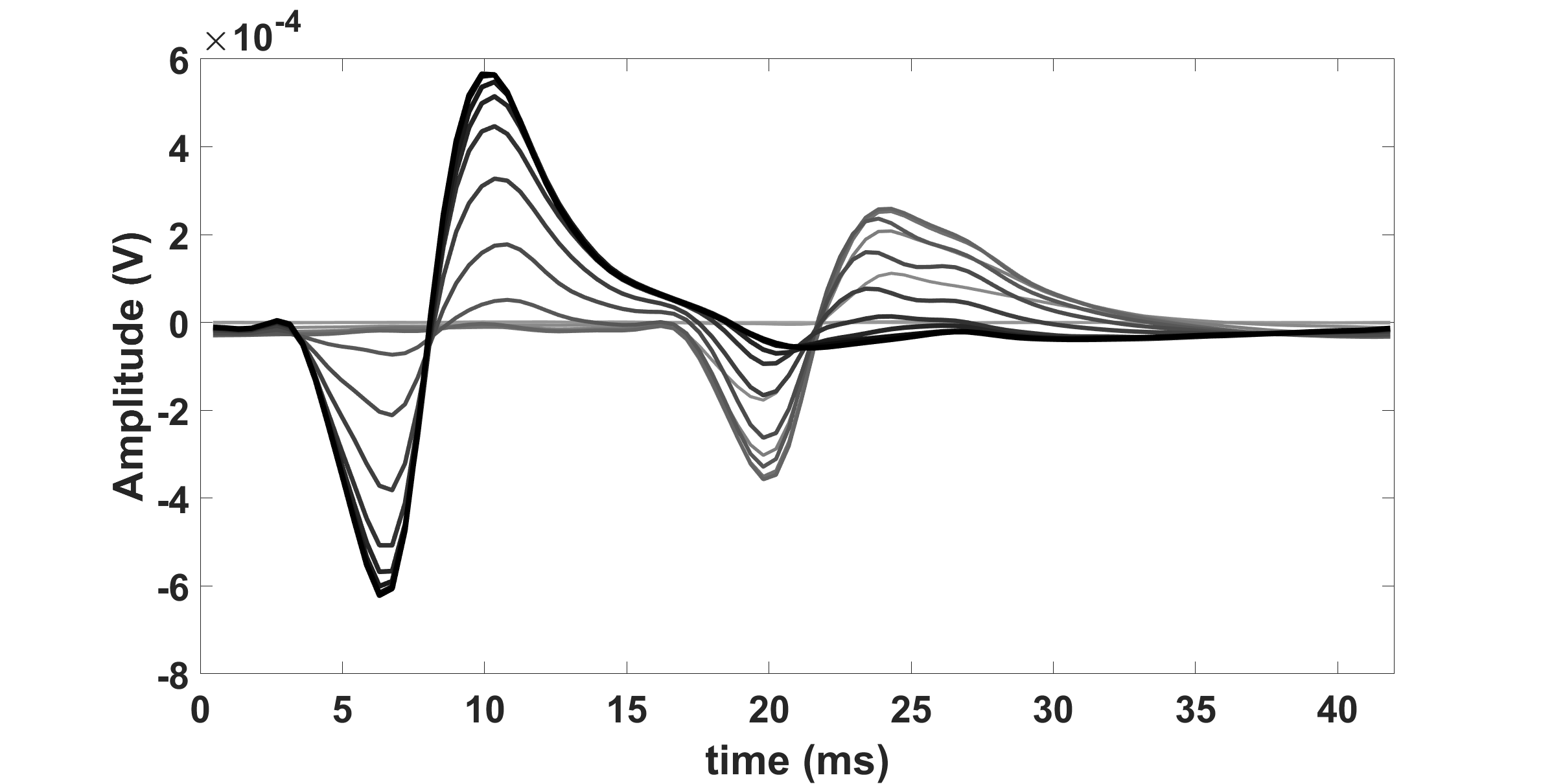
8.1.2 Influence of the H reflex on the selectivity of recruitment using multi-contact epineural stimulation
Participants: Lucie William, Christine Azevedo, David Guiraud, Charles Fattal.
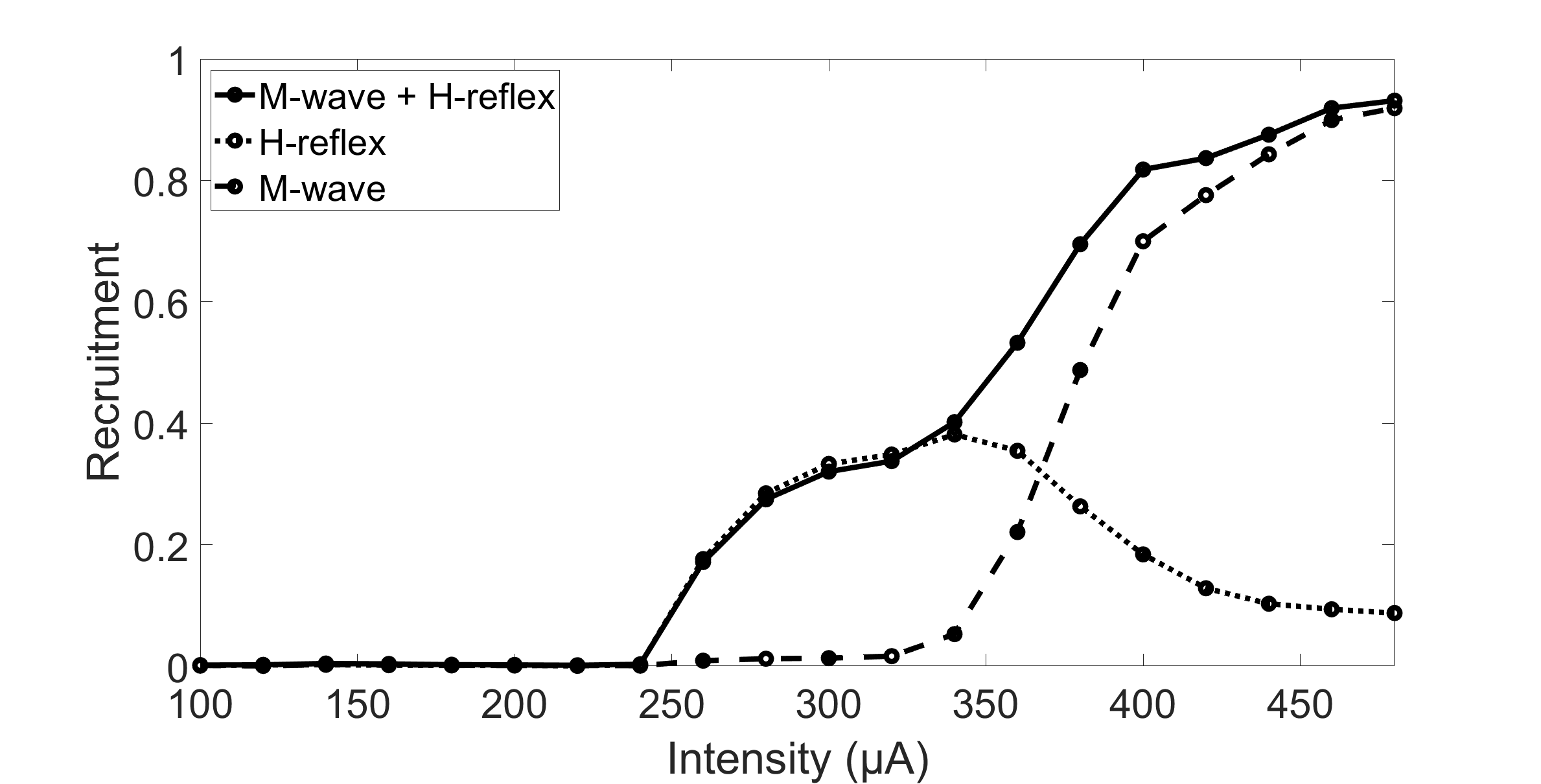
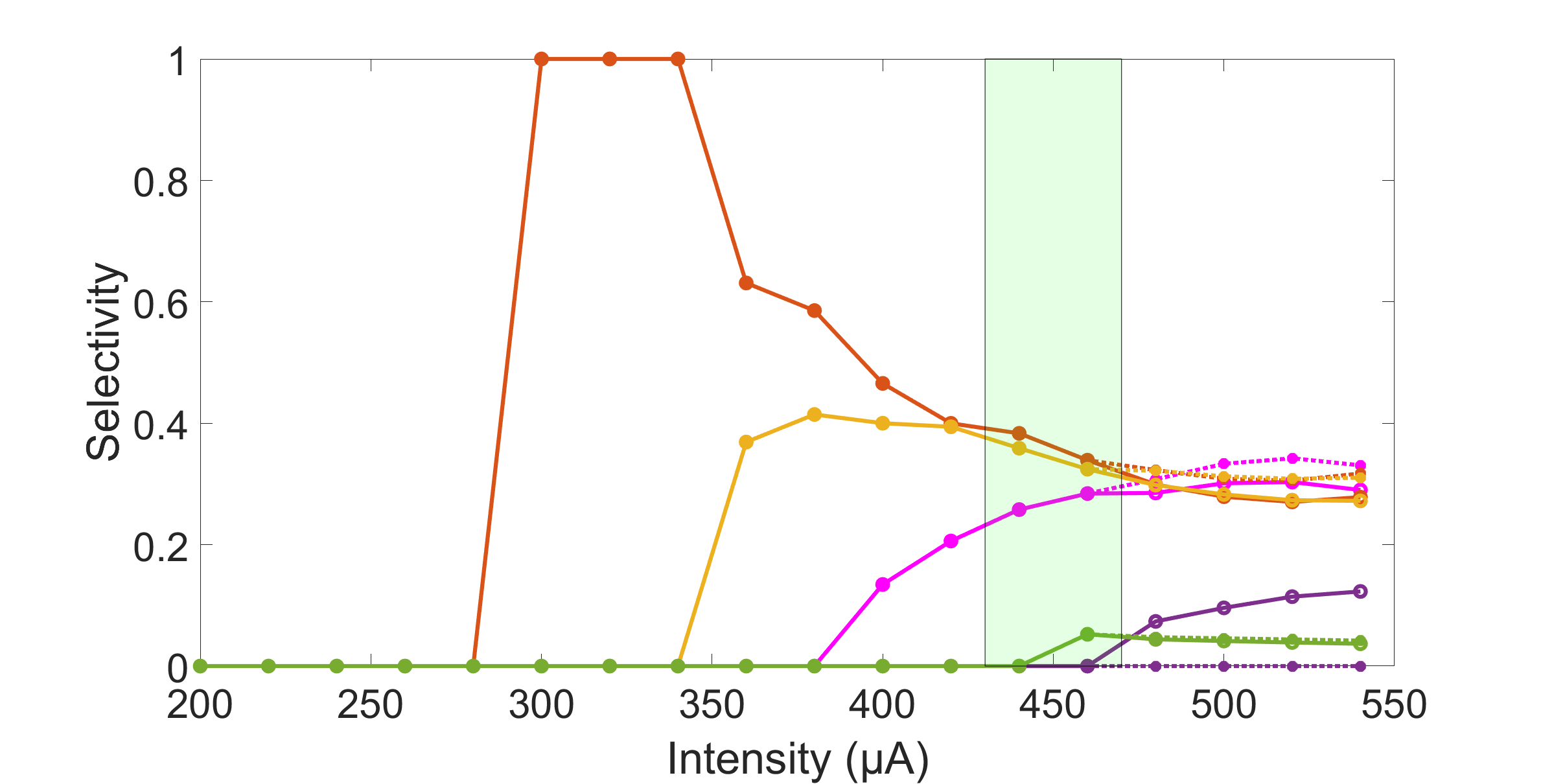
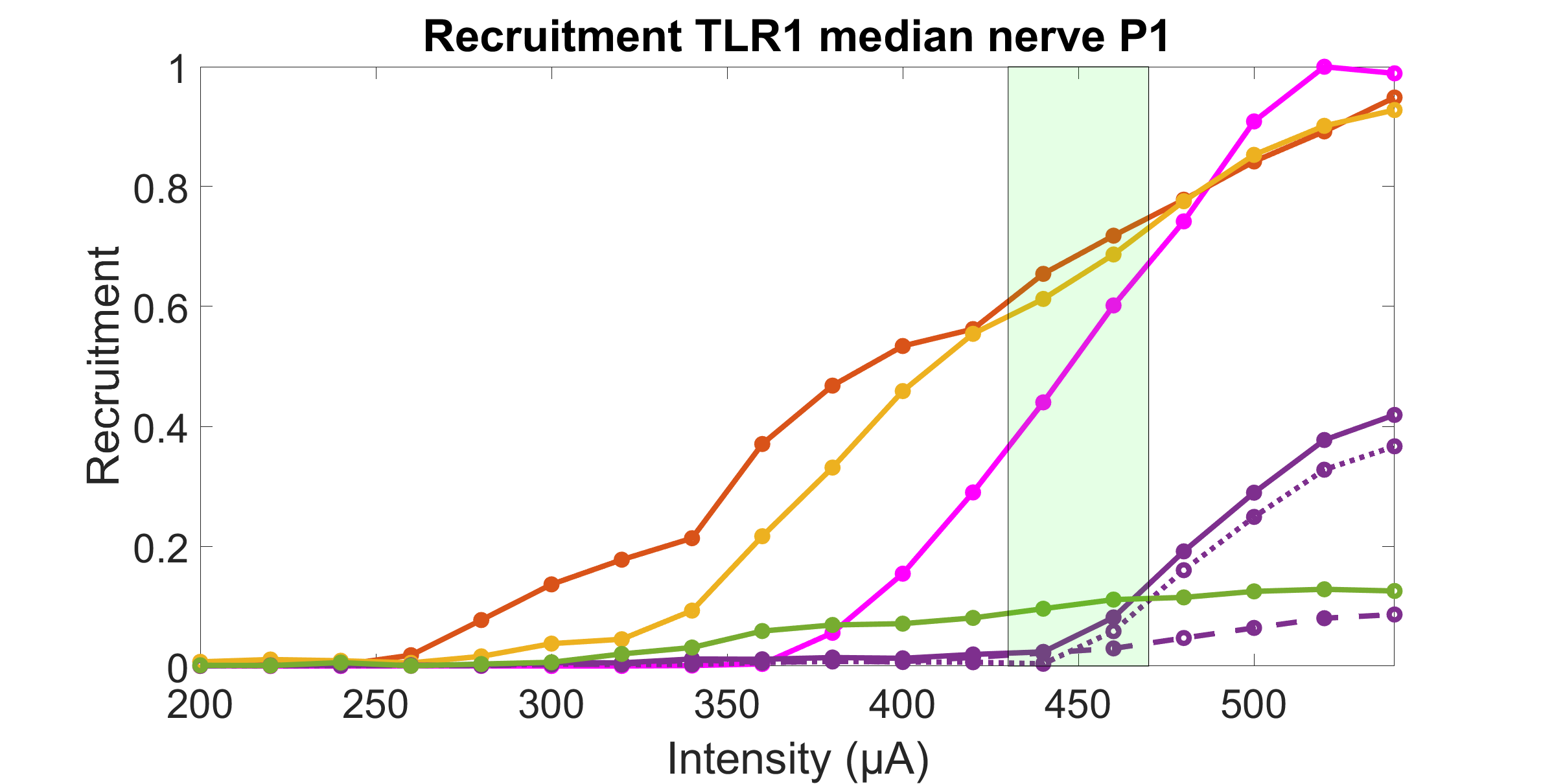
In AGILIS project during multi-contact epineural stimulation, it was possible to induce involuntary the Hoffman reflex (H-reflex). As the motoneurons have the largest axon diameter, they are usually activated first during the epineural stimulation. However, during the stimulation, it is possible to activated first the axon of sensory Ia afferents because of their large axon diameter. The signal spreads, passes through the spinal cord and activates the -motoneurons which induces the muscle contraction. Taking into consideration this reflex is important in the context of selective stimulation. The H-reflex was observed for one muscle (the pronator teres, resposible for the pronation movement, see Fig.9,a) on the five recorded. The other muscles recorded were the flexor carpi radialis (FCR) responsible for the wrist flexion, the flexor digitorum superficialis (FDS) responsible for the digit (except thumb) flexion, the flexor pollicis longus (FPL) responsible for the thumb flexion and the abductor pollicis brevis (APB) responsible for the thumb abduction. The impact of this phenomenon on the muscle order of recruitment, the recruitment curves (see Fig.9,b and c) and the selectivity was investigated (see Fig.9,d). Thus, taking into consideration the possibility to evoke this reflex is important to have a selective stimulation inducing a functional movement and in our particular case increasing the range of intensity that can be used by possibly blocking it with anodal block.
a- M-wave and H-reflex PT
b- Recruitment curve
c- Selectivity
d- Recruitment

8.1.3 IMU activation of a neuroprosthesis for individuals with tetraplegia
Participants: Lucas Fonseca, David Guiraud, Arthur Hiairrassary, Charles Fattal, Christine Azevedo.
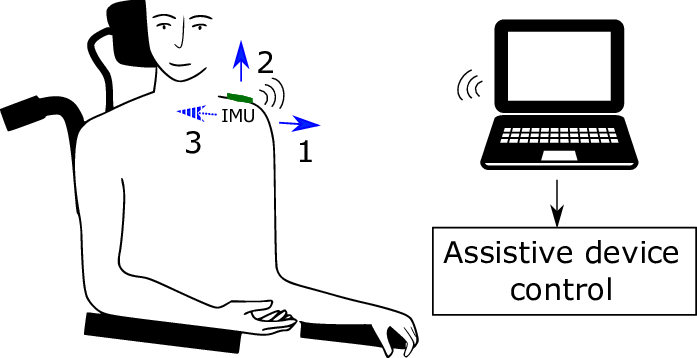
Assistive technologies may improve autonomy of persons with complete tetralegia but needs for ergonomic interfaces for the user to pilot these device still persist. Despite the paralysis of their arms, people with tetraplegia may retain residual shoulder movements. In this work we explored these movements as a mean to control these devices. We captured shoulder movements with a single inertial sensor and, by training a support vector machine based classifier, we decoded such information into user intent. The setup and training process take only a few minutes and so the classifiers can be user specific. We tested the algorithm with 10 able body and 2 spinal cord injury participants. The average classification accuracy was 80% and 84%, respectively.
The proposed algorithm is easy to set up, its operation is fully automated, and achieved results are on par with state-of-the-art systems. Significance: Assistive devices for persons without hand function present limitations in their user interfaces. Our work present a novel method to overcome some of these limitations by classifying user movement and decoding it into user intent, all with simple setup and training and no need for manual tuning. We demonstrate its feasibility with experiments with end users, including persons with complete tetraplegia without hand function.
This interface was used in AGILIS protocol.
8.1.4 EMG activation of a neuroprosthesis for individuals with tetraplegia
Participants: Thekla Stefanou, Lucas Fonseca, David Guiraud, Charles Fattal, Christine Azevedo.
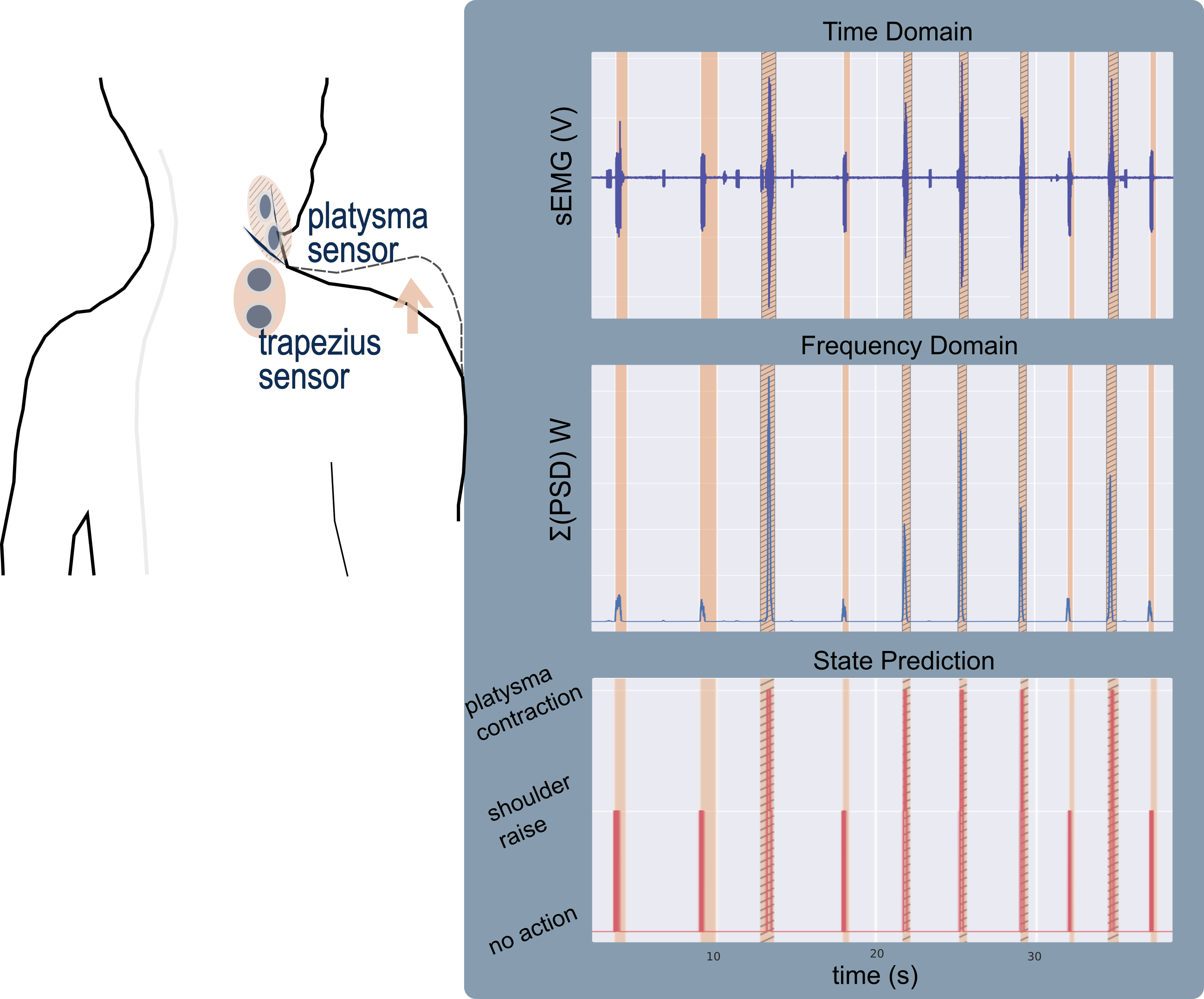
Human-machine interfaces are a crucial part of assistive, prosthesis and rehabilitation devices. It is essential to correctly identify the user's intent or orders to properly control such devices. We are specifically focusing on the activation of an upper-limb neuroprosthesis developed for individuals with complete tetraplegia (lesions at C4-C6) as in AGILIS protocol using surface electromyography signals (sEMG). We seek to understand, decode and classify surface electromyography (sEMG) signals in order to distinguish between the movements that may be used to activate a neuroprosthesis (AGILIS project) and other every day actions that involve the activation of similar muscles.
Primary experiments: frequency-domain sEMG analysis and classification results
We analysed surface electromyography (sEMG) signals of the trapezius and platysma muscles, that will be used to activate the neuroprosthesis, in ten able-bodied participants (Protocol A) and two participants with tetraplegia (Protocol B / Agilis protocol). Turning cross-talk to our advantage we demonstrated how one can recognise multiple motions or muscle contractions using a single sEMG channel. Protocol A involved the performance of shoulder raise (SR), shoulder forward (SF), shoulder backward (SB), shoulder raise-and-hold (SRH) and object raise (OR). In Protocol B individuals with tetraplegia performed shoulder raise and platysma contraction.
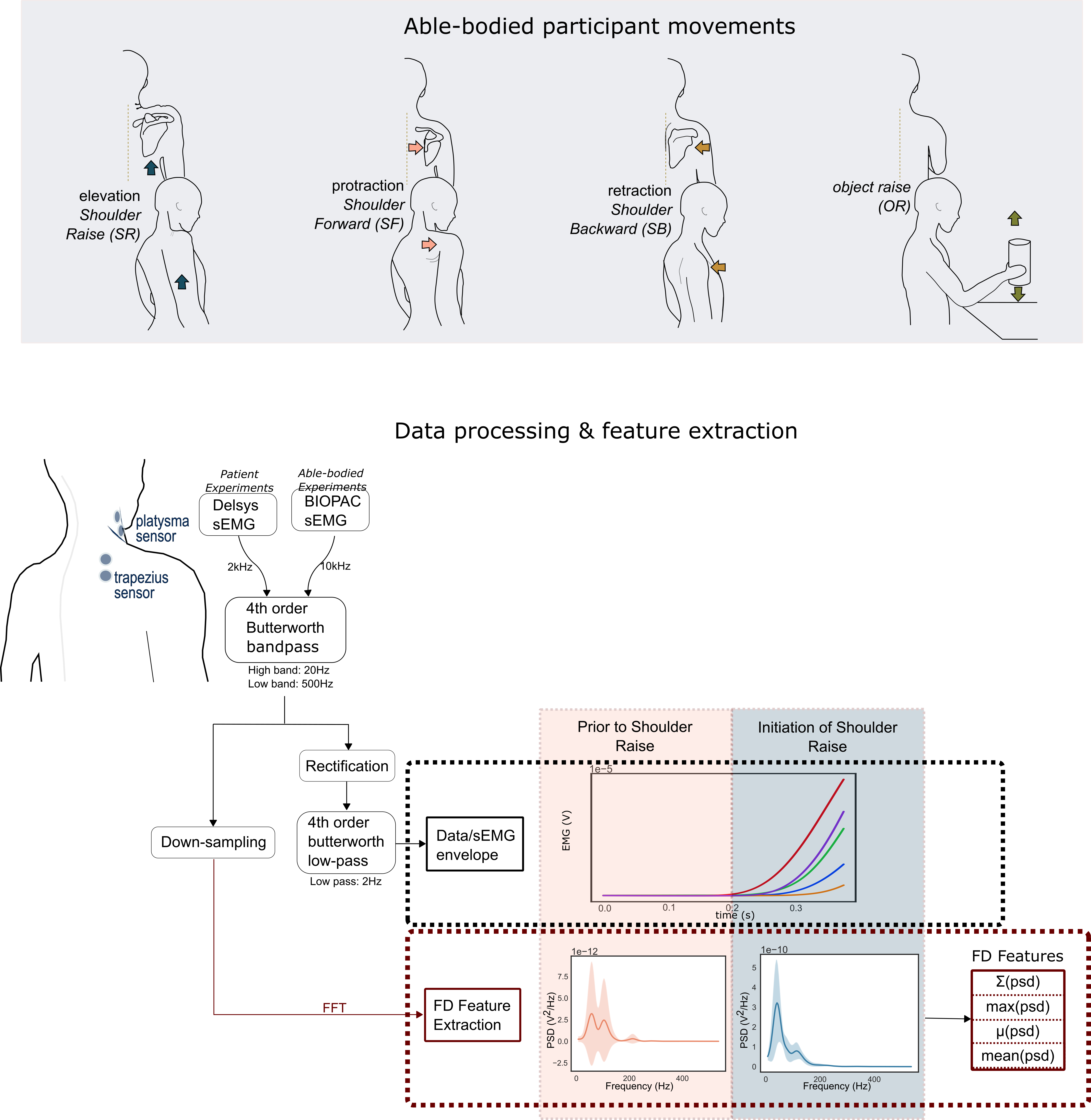
Figure 11 demonstrates the sEMG signal processing and feature extraction. Parametric algorithms were used to classify these features. This included decision trees (when a large amount of data were available) and applying thresholding on the features using the median values. Some interesting findings included:
- a muscle's activity has a specific frequency signature depending on the movements performed
- as a result of cross-talk, classification of SF and SB is also feasible using the trapezius sensor data despite having different agonists,
- the sEMG sensor placed on the platysma muscle contains information on both platysma muscle contraction and shoulder raise.
We attempt to promote a more optimal use of sEMG signal to better fit a future "home use" system. Single-channel sEMG control could simplify a system or provide contingencies in more complex systems.
EMG/IMU ongoing experimental protocols and data analysis
We are currently in the process of performing an experimental protocol validated by COERLE with able-bodied individuals. For these experiments we have written a script that integrates the Delsys sEMG system with the XSens IMU sensors and created a practical and engaging graphical user interface for the participants. The sEMG and IMU sensors are attached to the participants who are asked to perform a variety of actions such as different shoulder, arm and head movements, as well as laughing. The first stage of experiments is currently helping us develop classification algorithms in order to produce an robust neuroprostheses activation system while the upcoming second stage will mainly be used for the validation of the system.
8.2 Hybrid neuroprosthesis for individuals with central nervous system disorders
Hybrid Robotic Systems (HRS) are an innovative approach to neurological rehabilitation. They combine the advantages of muscle activation using Functional Electrical Stimulation (FES) with the repetitive muscle practice provided by Robot-Assisted Therapy (RT). This technology can potentially result in a device that is overall lighter (and thus more portable) than a non-hybrid robotic device and, on the other hand, can produce greater forces and have more precise control than FES alone.
8.2.1 User requirements for upper limb hybrid neuroprosthesis
Participants: Fernanda Ferreira, Lucas Fonseca, Christine Azevedo, Clément Trotobas, Ronan Le Guillou, Charles Fattal, David Gasq [CHU Toulouse, France], Claysson Vimieiro [UFMG, Brazil], Adriana Valladao [UFMG, Brazil].
A multicenter pilot study is being conducted in different countries, mainly France and Brazil, on health care professionals and people with neurological disorders. An online questionnaire has been developed by Inria, which included a risk analysis with the data privacy organization of INRIA. The objective is to investigate the essential requirements (needs, preferences, and expectations) of potential users that need to be met during the development of upper limb hybrid neuroprosthesis. This will promote a higher level of compliance, acceptance, and satisfaction with the use of the device, as well as to minimize user abandonment.
The questionnaire was developed with the contribution of 9 professionals from a clinical and engineering multidisciplinary research team composed of medical doctors in physical medicine, occupational therapists and engineers from Brazil and France (USSAP Perpignan and CHU Toulouse). As a pre-test, a small pilot study was conducted on 10 participants (5 in Brazil and 5 in France) in order to ensure relevance and validate the questions, to check that the questions are clear and easily understandable. The questionnaire is currently being widely disseminated on a secure platform at Inria that can be found online.
To our knowledge, this is the first study that investigates user needs for the development of upper limb hybrid neuroprosthesis.
8.2.2 Hybrid neuroprosthesis for rehabiliation in post-stroke hemiplegia
Participants: Fernanda Ferreira, Lucas Fonseca, Christine Azevedo, Claysson Vimieiro [UFMG Brazil], Adriana Valladao [UFMG Brazil].
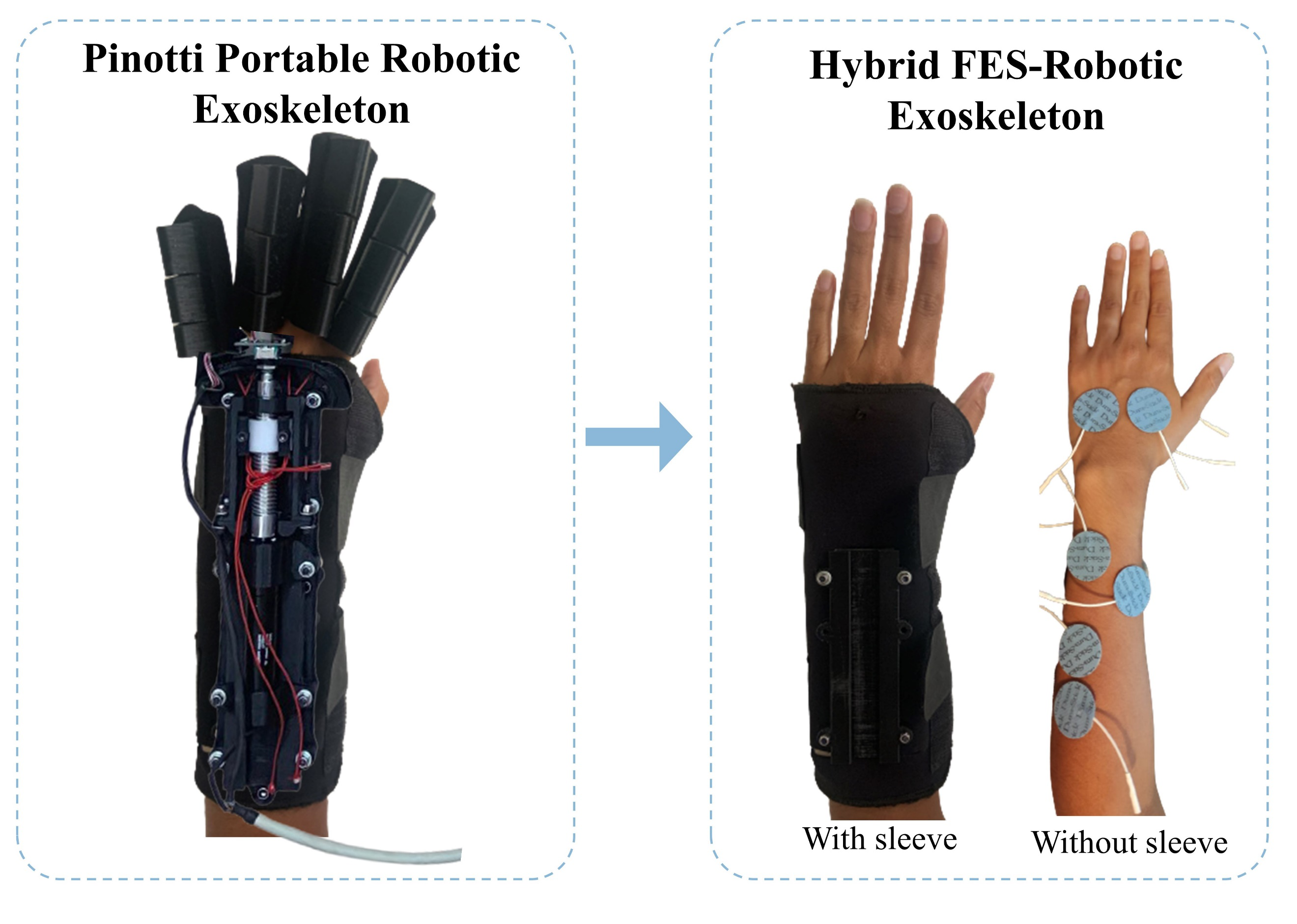
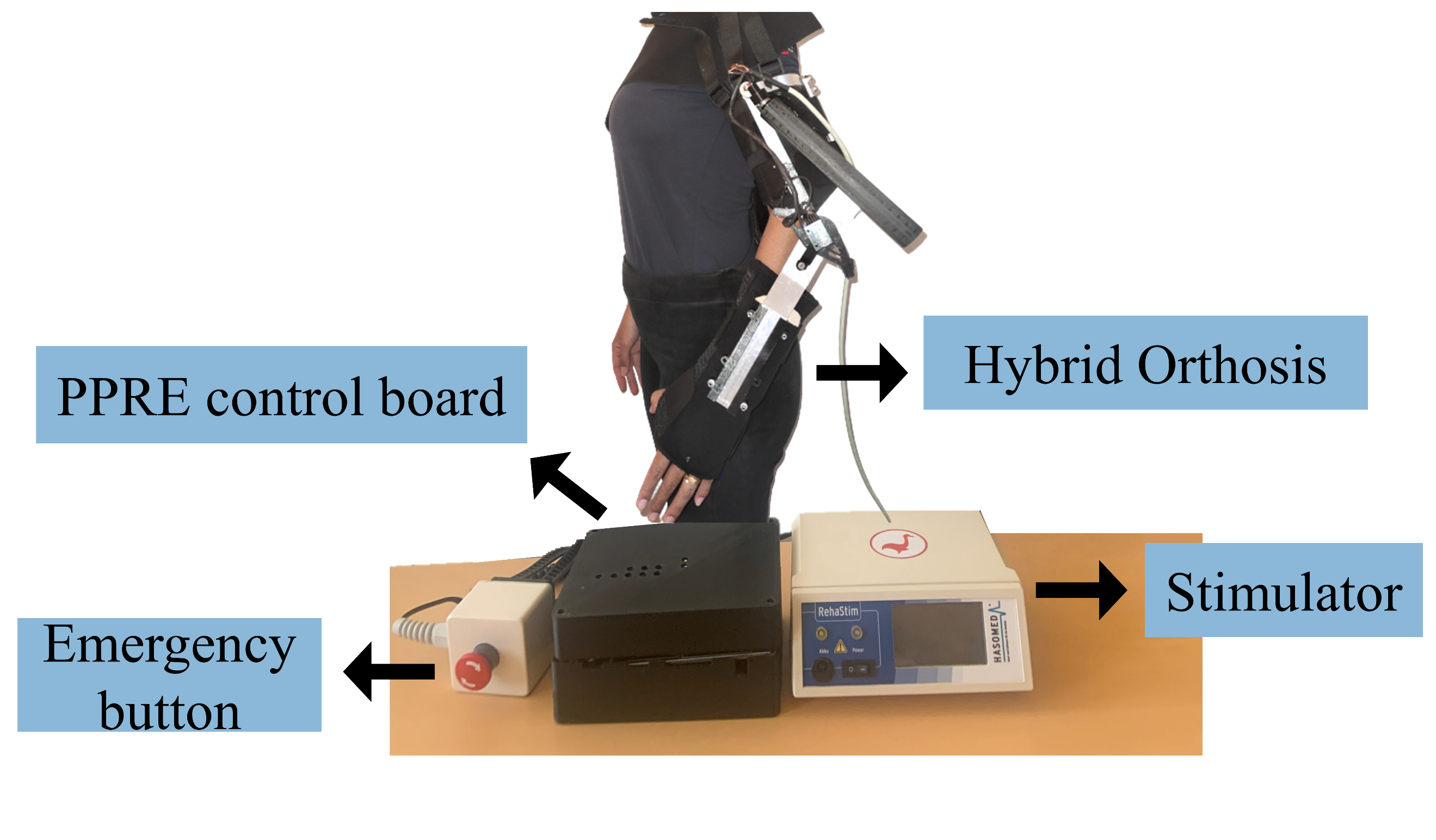
A portable robotic exoskeleton for upper limb rehabilitation of post-stroke individuals, called Pinotti Portable Robotic Exoskeleton (PPRE) was developed at the Bioengineering Laboratory (Labbio) at the Federal University of Minas Gerais (UFMG). It was improved by adding Functional Electrical Stimulation (FES), transforming it into a hybrid robotic exoskeleton. Fernanda Rodrigues spend 1 year in CAMIN team while she was a UFMG PhD student to work on this topic.
The PPRE was segmented into two functional modules: hand and elbow. The elbow module is responsible for flexing and extending the elbow and the hand module is responsible for extension of the second to fifth fingers. Both are motor-driven from Maxon Motors™. To improve the device, modifications were made to the hand module by removing the motor and mechanical structures and adding FES, transforming it into a Hybrid FES-Robotic Orthosis. A computer program was developed using Python to integrate the different drive systems (motor and FES), and a new graphic interface was created to facilitate the operation by users. Thus, it was possible to increase the number of movements provided by the equipment from one (extension of the 2nd to the 5th finger) to five (extension and flexion of the 2nd to the 5th finger, thumb extension, adduction and abduction with thumb opposition), enabling the execution of other types of grasps and amplifying the repertoire of possible activities. In addition, the mechanical structure was simplified, the volume decreased, the total weight was reduced and, consequently, greater portability was achieved. Furthermore, it enables direct activation of the paretic muscles, thus reducing the user's passive posture and favoring increased motor control, which should promote functional recovery.
The equipment was tested through experimental tests and it was observed that the system proved to be effective in performing tasks of reaching and grasping different objects with the combination of movements of the elbow and hand modules, indicating that it can be used to perform functional activities. Furthermore, the correct functioning of the system was verified in 2 healthy participants, stimulating with efficiency the desired muscles. In the future, tests will be carried out on individuals with upper limb motor impairment as a result of stroke to ratify these results. This project was approved by the Research Ethics Committee of the Federal University of Minas Gerais (CAAE Registry: 22207213.5.0000.5149).
8.2.3 Systematic review on upper limb hybrid neuroprostheses for rehabilitation of neurological disorders
Participants: Fernanda Ferreira, Lucas Fonseca, Christine Azevedo, Claysson Vimieiro [UFMG Brazil], Adriana Valladao [UFMG Brazil].
Previous studies indicate that hybrid systems may be more effective in improving motor control and functional skills compared to robotic therapy alone in patients with hemiparesis after chronic stroke and compared to traditional physical therapy in individuals with acute stroke. However, although studies prove the potential benefit of this technology, few randomized controlled trials have been conducted so far and no systematic literature review has been carried out. Systematic reviews are necessary because it is the most appropriate and current method for summarizing and synthesizing evidences about the effectiveness and effects of interventions. Therefore, this project is investigating systematically the effects of HRRS on central injuries upper limb recovery based on each of the International Classification of Functioning, Disability and Health (ICF) domains. This study will contribute to the development of new hybrid neuroprostheses that are proven to be effective for upper limb rehabilitation. This systematic review is currently underway with the participation of physicians, occupational therapists and engineers. It is registered in PROSPERO under protocol CRD42021227548 23.
8.2.4 Orthyb: an assistive hybrid orthosis for upper limb function
Participants: Clément Trotobas, Christine Azevedo, Fernanda Rodrigues Ferreira Lopes, Andrew Murray [DimLab Dayton], Roger Pissard-Gibollet [SED Grenoble].
The goal of this project is to give functional mobility to paralyzed hand and wrist of people in order to hold an object in palmar grasp. The context is not rehabilitation as in PPRE device but an assistive solution for daily tasks execution. The challenge is to explore novel technologies to propose a light and modular solution. The device to be developed is a hybrid orthosis composed of a mechanical orthosis and a stimulator. The wrist and finger movements will be generated by muscle contractions through functional electrical stimulation (FES) while the guiding and locking are mechanical. This locking would make it possible to limit early muscle fatigue while maintaining the grip.
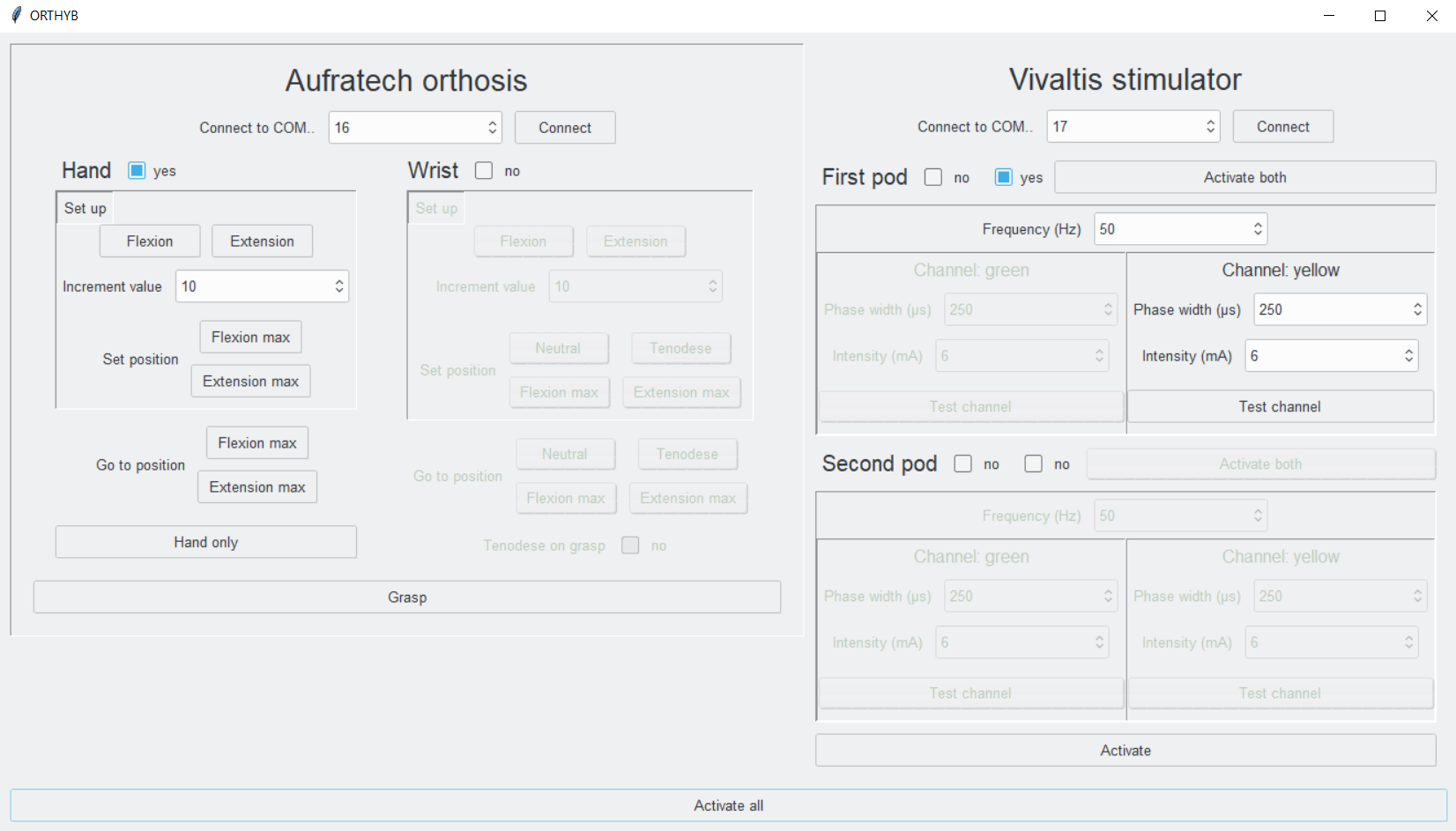
A first mechanical orthosis was developed by the startup Aufratech based on CAMIN team specifications in order to assess the general principles of the approach. It includes two DC motors, one for extension and flexion of the wrist, and one for all fingers (fig. 15). It is a cable driven orthosis meaning that motors pull or release cables, moving the limbs. Although the mechanical orthosis is already developed, it lacks drivers and control unit. To date, the driver used is a L298N and the control board is a Adafruit feather nRF52840 express. Moreover, cited participants are the first to test over several months this orthosis and some modifications could be planned. The orthosis can be controlled via keyboard inputs; it is possible to set and move the orthosis to wanted positions and move by increments.
The electrical stimulator chosen is the Vivaltis Phoenix for its portability. Application Programming Interfaces (APIs) have already been developed in Matlab, C++ and Python. Even if an updated of the API is necessary, the Python version has been chosen for the ease of developing an Graphical User Interface (GUI).
The GUI is currently being developed. It includes both orthosis and stimulator setup and control (fig. 16).
To validate experimentally the approach, a protocol will be carried at the Federal University of Minas Gerais (UFMG) in Brazil. A protocol has been edited and proposed to the local Ethics Committee.


8.2.5 Modular Elbow-Forearm Orthosis
Participants: Clément Trotobas, Christine Azevedo, Andrew Murray [DimLab Dayton], Marie Ghekiere.
The goal of this project is to imagine novel light and wearable orthotic solutions for upper-limb movements assistance. The objective is to give functional mobility of paralyzed elbow and forearm. The device to be developed would be an hybrid orthosis composed of a mechanical orthosis and a stimulator. The elbow and forearm movements will be generated by muscle contractions through functional electrical stimulation (FES) while the guiding and locking are mechanical. This locking would make it possible to limit early muscle fatigue while maintaining a position.
Disability can be very different from an individual to another and the approach of one size fits most is questionable. Thus, the orthosis is intended to be modular with both pods from Vivaltis Phoenix stimulator (fig. 15) and mechanical modules close to the one developed for Exofinger (fig. 17). It would include control board with bluetooth low energy (BLE), batteries, DC motors coupled with coils to wind cables to move limbs. These modules, including Vivaltis pods, could be placed on straps enabling a position and a number fitting the wearer's needs.
8.3 Direct electrical stimulation (DES) of the Brain and measurement of evoked potentials for on-line guidance of Neurosurgery: a combined simulation and experimental approach
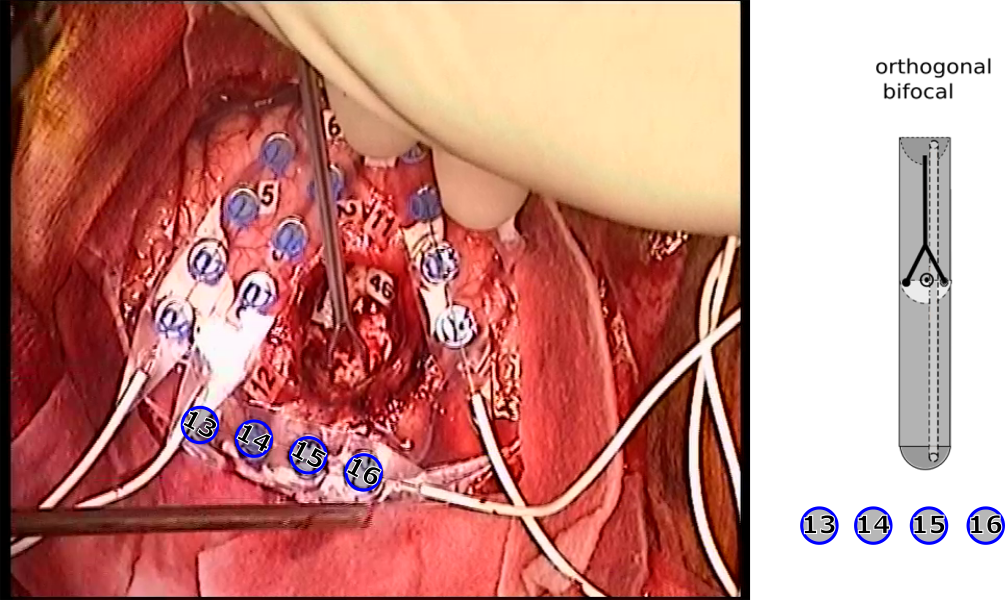
Participants: Felix Schlosser-Perrin, Olivier Rossel, Emmanuel Mandonnet [AP-HP, France], Hugues Duffau [CHU-Montpellier, France], François Bonnetblanc.
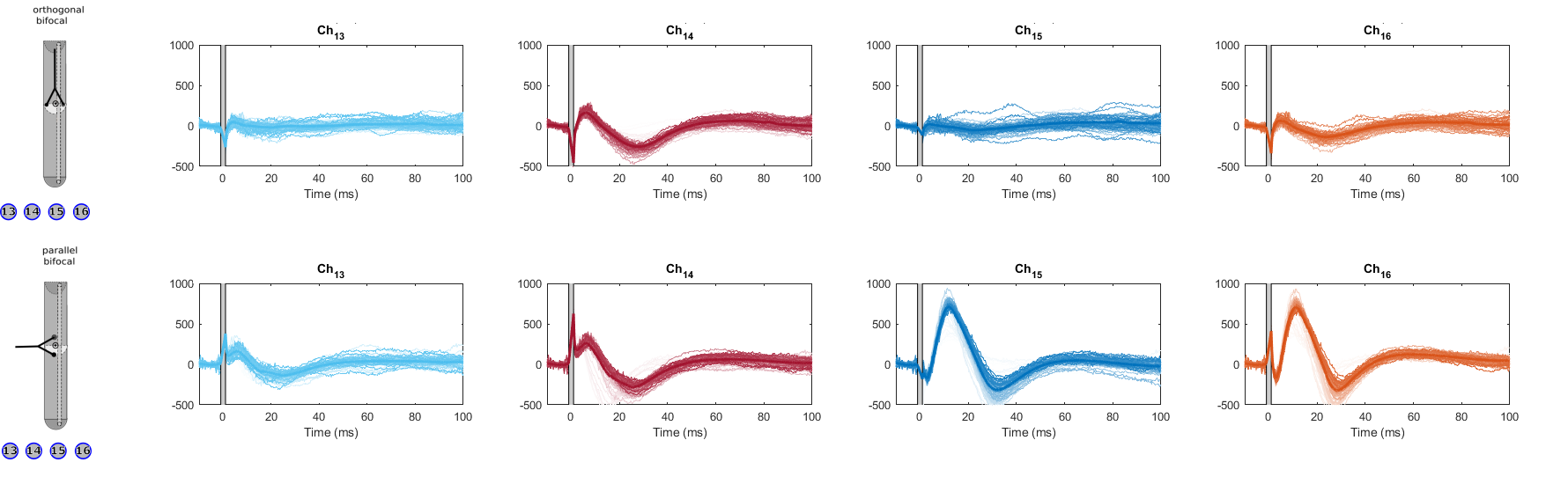
In the future, brain connectivity could be assessed on-line to guide the Neurosurgery using the measure of Potentials Evoked by Direct Electrical Stimulation (DES). However, the effects of DES can be complex and remain poorly understood. Here, we test the effects of orienting differently a bipolar probe on white matter tracts. In our approach we combine modeling and experimental studies with in-vivo measurements. The modeling is performed in two stages. First, it includes the calculation of the electric fields in the conductive medium via the COMSOL software and then the estimation of the activation on the Ranvier nodes with the propagation of the action potentials along the fiber (thanks to an axon model). The simulations (fig.18) show that during orthogonal positioning of the probe relative to the white matter tract, the central part in the axon section may not be activated, suggesting the prediction that during orthogonal stimulation of the tract, which, at the cortical endings opens in a fan, we should not observe evoked potentials on the middle electrode. This is observed on experimental data (fig.19 and fig.20). More specifically, an activation gap between probes in the orthogonal configuration (fig.18A) for axon tracts is seen but not when the probes where set in a parallel configuration (fig.18B). This may also be observed experimentally on recordings (fig.20). For parallel stimulation, activation is more focal, it activates the major part of the track.
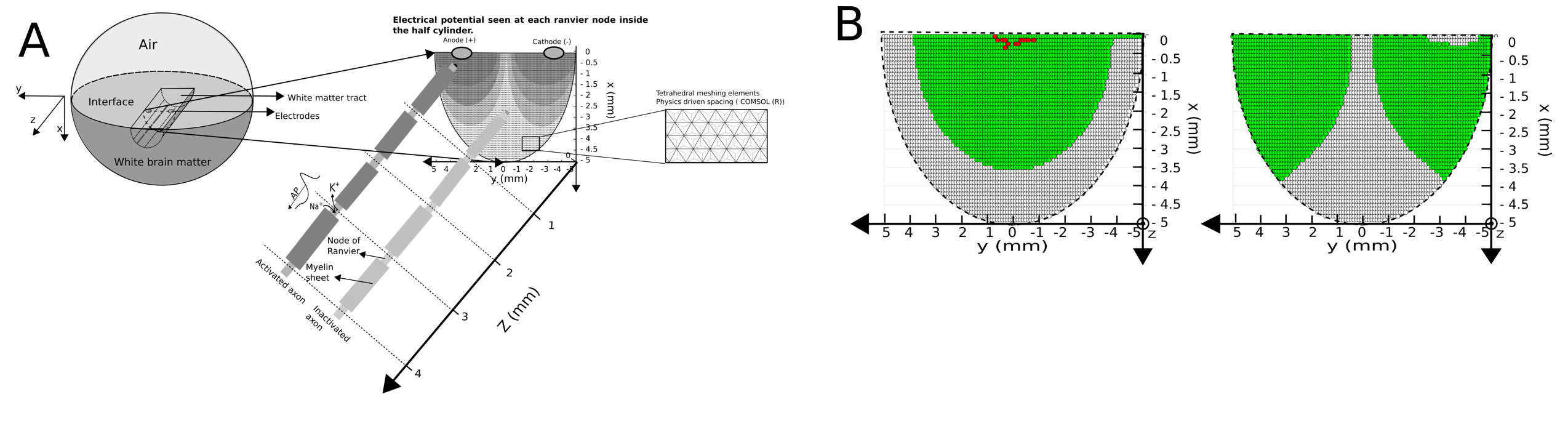
The experimental results (fig.20) show that for the parallel configuration the amplitude of the evoked potential is maximum for the contact 15. The adjacent contacts (14 and 16) register evoked potentials of lower amplitude. This confirms a localized epicenter. Conversely, for the orthogonal configuration the amplitude of the evoked potential is minimum for the contact 15, the adjacent contacts (14 and 16) record evoked potentials of higher amplitudes. This confirms that central fibers are not or only slightly activated unlike the fibers located more lateraly and under the stimulation contacts. These preliminary results are in the vein of simulation results, this confirms that simulations have a great interest for the clinical field. This can be of daily use to neurosurgeons, allowing them to be able to accurately track on-line white matter fascicles.
8.4 Spinal cord stimulation (SCS)
8.4.1 SCS for rehabilitation of bladder, bowel and sexual functions in spinal cord injury – SPINSTIM Project
Spinal cord injuries have disastrous consequences for individuals, who, in addition to the motor impairments, must deal with sexual, bowel and urinary problems. Beyond their impact on health, these disorders have psychosocial implications that must not be neglected. Regarding lower urinary tract (LUT) function, SCI induces a communication breakdown between supraspinal and spinal levels that not only manifests by the loss of voluntary control of micturition but also by an exacerbation of reflex processes. Adult neurogenic lower urinary tract dysfunction refers to the urological symptoms associated with these disturbances and expresses clinically by two major problems: the disruption of the detrusor activity (detrusor overactivity – DO or detrusor underactivity – DU) and the detrusor sphincter dyssynergia (DSD).
Systematic review on Sacral Anterior Root Stimulation (SARS)
Participants: Thomas Guiho, Luc Bauchet [CHU Montpellier, France], Jean-Rodolphe Vignes [CHU Bordeaux, France], Claire Delecci [CHU Bordeaux, France], Christine Azevedo Coste, Charles Fattal, David Guiraud.
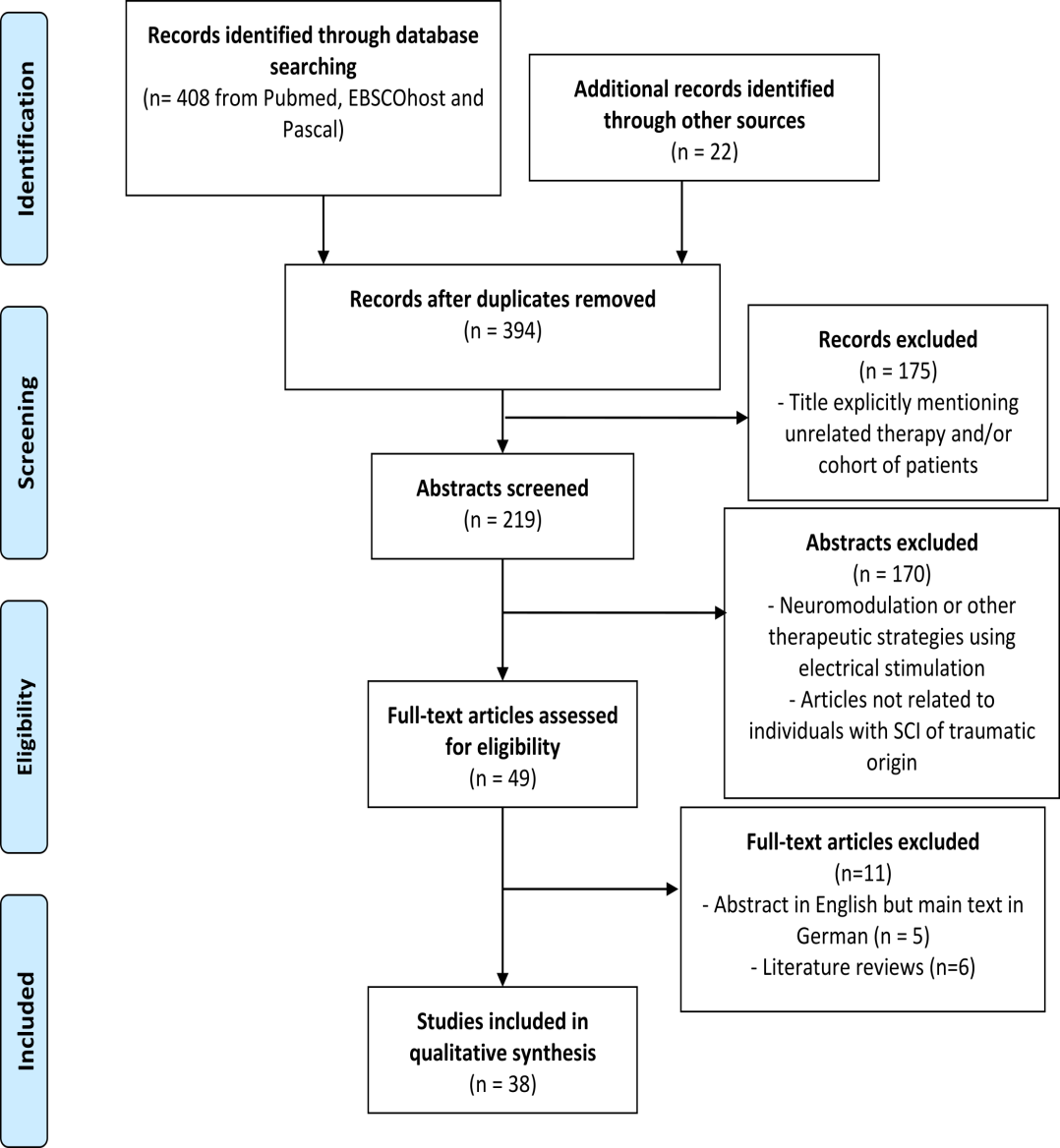
In order to restore urinary function, a device based on a strategy of functional electrical stimulation – more specifically, sacral anterior root stimulation (SARS) – was developed 40 years ago: the Brindley-Finetech® implant (or SARS implant). However, the Brindley device does not handle DO by itself as bladder contractions at low filling are still likely induced by the disturbed sacral reflex arch. Sacral deafferentation (i.e., sectioning of the sacral posterior roots, procedure called rhizotomy) is often coupled with SARS implantation to prevent DO – and, consequently, promote bladder compliance – but results in the potentially irreversible loss of spared perineal sensation and function (erection and ejaculation in men, vaginal lubrication in women, defecation). In an article published in World Neurosurgery in September 14, we systematically reviewed (Preferred Reporting Items for Systematic reviews and Meta-Analyses – PRISMA – recommendations) the reports of 40 years of SARS implantation and assessed the medical added-value and limits of this approach through four axes of investigation: i) impact on visceral functions, ii) implantation safety and device reliability, iii) individuals quality of life, and iv) additional information about the procedure. (fig.21)
Despite generally positive results on visceral functions – especially LUT function – the number of Brindley implantation procedures has declined in recent years. Thus, the rehabilitation of visceral functions remains a major concern of individuals with SCI, and we decided to investigate less invasive solutions or alternatives that are likely to offer these persons a dramatic gain in quality of life.
Pig experiment campaign
Participants: Thomas Guiho, Jean-Luc Boulland [Oslo University], Christine Azevedo Coste, David Guiraud.
This work aimed at investigating various techniques for spinal cord electrical stimulation in order to address dysfunctions in spinal cord injured individuals on lesion levels that have an impact on lower limb movements and bladder, bowel and sexual functions. Orderly recruitment of fibers at the spinal cord level should eventually lead to orderly recruitment of the detrusor muscle without activation of the bladder sphincter. Thereby, low pressure voiding, for example, should be obtained but is currently impossible with existing active implantable medical devices. Two experimental explorations were performed with direct spinal cord stimulation in Oslo in December (on 2 pigs). Experiments were conducted in collaboration with the University of Oslo and additional experiments are expected in the next few months subject to an improvement of the covid-19 situation. Data will be further processed in the next few months after recruitment of a master student. (fig.22)
8.4.2 Investigation of cervical spinal cord stimulation (SCS) on upper limb functions in rhesus macaques
Participants: Thomas Guiho, Andrew Jackson [Newcastle University].
From January to February 2021, Thomas Guiho was seconded in Newcastle University to investigate the impact of spinal cord stimulation protocols at a cervical level on upper limb functions in rhesus macaques. Both stimulation during sedated and awake sessions were implemented in intact animals while phamacological inactivation of upper limbs was performed to mimic impairments following spinal cord injury. A novel multielectrode cuff was placed around both and ventral surface and multiple stimulation parameters were further investigated in an attempt to highlight the mechanism of action of SCS.
8.5 Assisted cycling : CYCLOSEF
Participants: Martin Schmoll, Ronan Le Guillou, Christine Azevedo, Charles Fattal.
Our team has been working for several years on FES-assisted cycling for individuals with spinal cord injury. We intend to improve cycling accessibility to a larger population in order to propose exercising and leisure activity to improve quality of life and self esteem. It has also been shown that FES-cycling of subjects with Spinal Cord injuries (SCI) results in physiological and psychological positive effects such as cardiovascular training, decrease in pressure sores occurrence and self-esteem improvements. However, the use of this technology has often remained restricted to indoor and stationary ergometers in clinical contexts, partly due to the small amount (10–25 W) of power produced and the requirement of experimented users to finely tune the stimulation patterns needed to stimulate lower limb.
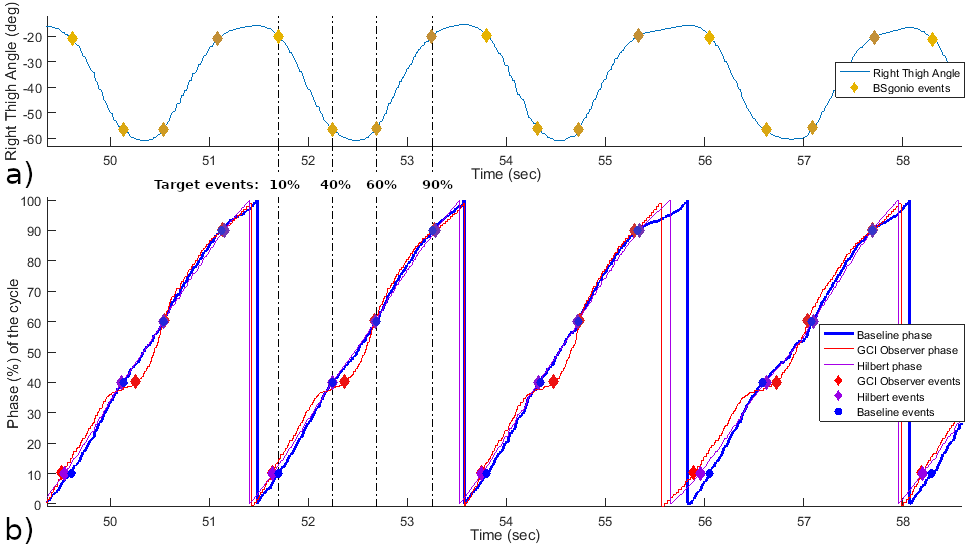
Following the conclusion of the CYCLOSEF study, several publications were produced. The benefits of 1-year home training with Functional Electrical Stimulation cycling in paraplegia during the COVID-19 crisis were presented, as well as a novel framework for quantifying accuracy and precision of event detection algorithms in FES-Cycling (fig.23) 13, 16.
Furthermore, as part of the research on this project, experiments from November 2019 in Brasília in collaboration with our associate team CACAO, lead to the publication in January 2021 of a practical approach on standardizing fatigue-resistance testing during electrical stimulation of paralysed human quadriceps muscles 20.
8.6 Post Stroke upper limb rehabilitation
8.6.1 Post Stroke upper limb rehabilitation with tangible BCI : GRASP-IT
Participants: Ronan Le Guillou, Christine Azevedo, David Gasq [CHU Toulouse, France], Laurent Bougrain [LORIA, France].
Stroke is a major cause of disability in adults. The GRASP-IT project aims at improving the motor recovery of the upper limb of post-stroke hemiplegic patients by designing and using a gamified system that integrates complementary stimulation modalities (functional electrical, haptic and tangible stimulation) in brain-computer interfaces (BCIs) based on the generation of kinesthetic motor imaginations (KMI) (fig.24).
This project, carried by Laurent Bougrain [LORIA], proposes to design and evaluate the usability (including the effectiveness of the interactions with respect to the stimulation of the motor and somatosensory cortex) and the acceptability of the interface, called GRASP-IT, and of the interactions it induces. This project integrates both the design of the solutions and their evaluation, through an ambitious clinical evaluation including 75 patients in 3 functional rehabilitation centers in France. The GRASP-IT project is planned over 48 months to allow the design and validation of evaluation methods (preliminary and final) within a multicenter clinical protocol.
As collaborators in this project, and one of the clinical centers [CHU Toulouse], in preparation for the clinical experiments to start (expected to be Q3-Q4 2022), we developped a module allowing Functional Electrical Stimulation as a feedback modality for the Grasp-IT project.

8.6.2 Post Stroke upper limb neuroprosthesis : Projects Prehen-Stroke & Grasp-Again
Participants: Ronan Le Guillou, Christine Azevedo, David Gasq [CHU Toulouse].
The improvement of the grasp abilities remains a challenge in 50% of post-stroke subjects who have not recovered functional grasping due to paralysis of the finger’s extensor muscles. Following the ePrehension-Stroke study in 2019-2020 and its informative results, a new study was started. The PHRCi Prehen-Stroke project (ClinicalTrials.gov Identifier: NCT04804384), aims to evaluate the piloting modalities and the functional impact of a grasping neuroprosthesis in the vascular hemiparetic patient. The addition of new features like voice control was completed and inclusions of participants have begun (fig.25). An embedded version of this grasping neuroprosthesis is being developped to further evaluate its functional impact on the grapsing abilities of hemiplegic patients at home. This embedded version is to be used as part of an ancillary study of Prehen-Stroke, named Grasp-Again, which is being written currently.
8.7 Ongoing experimental protocols with human participants
Our activities are associated to an important working load on designing protocols and obtaining authorizations from ethical committees and/or health agencies. We list in the following the protocols that have obtained authorizations and were valid in 2021.
- Assessment of the Functional Impact of a Close-loop Controlled Prehension Neuroprosthesis in Post-stroke Patients (PREHENS-STROKE). Evaluation of optimal piloting modalities and their impact on the grasping capacity in Functional Electrical Stimulation of Finger Extensor Muscles in the Hemiplegic Patient in Chronic Phase. CHU Nîmes, CHU Toulouse. Protocol RCB 2018-A02144-51. ClinicalTrials.gov Identifier: NCT04804384
- Variability of the Unique Fiber Potentials of a Spastic Muscle Treated With Botulinum Toxin (JITTOX). CHU Nîmes? Protocol RCB 2019-A01863-52A. ClinicalTrials.gov Identifier: NCT04002843
- Measure of the Potential Evoked by Electric Stimulation (PE & CE). CHU Montpellier. Protocol RCB 2014-A00056-43. ClinicalTrials.gov Identifier: NCT02509442
- Mindfulness-based Intervention for People With Parkinsonian Tremor (MEDITAPARK). CHU Montpellier. ID-RCB: 2020-A01927-32. ClinicalTrials.gov Identifier: NCT05168046
- AGILIS-ML: Development of user control interface based on residual movement for upper limb neuroprostheses in the context of the AGILIS project. The protocol includes experiments with able body subjects and has the approval of COERLE (autorisation nº 2020-09 AGILIS).
- Exofinger: a tool for entering objects. COERLE (autorisation nº 2021-47 Exofinger)
- Vibrosens: Comparative study of electro- and vibro-stimulation. COERLE (autorisation nº 2022-06 Vibrosens)
- Human Upper Body Biomechanics: building an upper body bio-mechanics dataset that can be used for research and development of upper limb assistive devices. COERLE (autorisation nº 2021-28)
- Upper limb hybrid robotic rehabilitation effectiveness aiming at compiling existing knowledge on the use of hybrid robotic devices on the rehabilitation of neurological disorders affecting upper limbs. The systematic review is registered in PROSPERO (protocol CRD42021227548).
9 Bilateral contracts and grants with industry
NEURINNOV startup finances half of the PhD thesis salary of Lucie William.
10 Partnerships and cooperations
10.1 International initiatives
H2020-MSCA-IF-2019. Lucas Fonseca has obtained a Marie Curie Grant for his project: "Neuroprosthesis user interface based on residual motor skills and muscle activity in persons with upper limb disabilities".
10.1.1 Inria associate team not involved in an IIL or an international program
CACAO associate team
-
Title:
Lower limb electrical stimulation for function restoration
-
Duration:
2019 -> 2022
-
Coordinator:
Christine Azevedo
-
Partners:
- University of Brasilia UnB (Brazil) Emerson Fachin-Martins
- University Federal of Minas Gerais (Brazil) Henrique Resende
-
Inria contact:
Christine Azevedo Coste
-
Summary:
Associate team dedicated to the developement of assistive technologies to enhance rehabilitation of individuals with sensory-motor deficiencies. Topics include FES-assisted cycling and transfer and hybrid orthosis for upper-limb.
BrEl-Mapping
-
Title:
Electrophysiological brain mapping
-
Duration:
2021 ->
-
Coordinator:
Riki Mastumoto (matsumot@med.kobe-u.ac.jp)
-
Partners:
- Kobe University Graduate School of Medicine
-
Inria contact:
Francois Bonnetblanc
-
Summary:
Direct electrical stimulation of the brain (DES) helps to inhibit areas of the brain in order to perform anatomo-functional mapping. It is used successfully in clinical practice in the awake surgery of epileptogenic foci and infiltrating brain tumors. It identifies "non-functional" areas that can be resected. Its electrophysiological effects are still very poorly understood because of the complexity of the excited brain structures, and the stimulation modes used remain rudimentary. Understanding these mechanisms is crucial for (1) understanding the relationships between electrophysiology and function (2) neuromodulation of the brain and (3) at longer term for the development of neuroprosthetics for sensorimotor restoration. To better control the practice of DES and its utility in electrophysiological mapping, we will measure its electrophysiological effects through the action potentials (PA) and evoked local field potentials (PE). The clinical objectives are to improve the protocol of DES and the collection of its electrophysiological effects in the awake surgery of low-grade infiltrating gliomas but also for any other type of surgery of tumors practiced under general anesthesia to (1) develop electrodiagnostic approaches and tools that aim to determine the electrophysiological status in real time of neural tissues on and around the tumor and (2) to measure the structural connectivity in vivo and real-time in the peri-lesional area and in particular the subcortical areas to help objectify the boundaries of resection on the white matter bundles during the surgical procedure itself.
10.1.2 Participation in other International Programs
RESCUEGRAPH
- FLAG-ERA JTC 2021 - Graphene - Applied Research and Innovation
-
Partner Institution(s):
- Universitat Autonoma de Barcelona - Institute of Neurosciences (UAB)
- Catalan Institute of Nanoscience and Nanotechnology - Advanced electronic materials and devices group (ICN2)
- Boğaziçi University - Institute of Biomedical Engineering (BOUN)
- NEURINNOV company (France)
- Date/Duration: 36 months starting December 2021
10.2 International research visitors
10.2.1 Visits of international scientists
Other international visits to the team
- Fernanda Rodrigues spent 1 year in the team during her last year of PhD from University Federal of Minas Gerais (Brazil)
10.2.2 Visits to international teams
Research stays abroad
- Thomas Guiho spent 2 months in Newcastle in January/February to perform experiments of spinal cord stimulation in monkeys
- Thomas Guiho spent 2 weeks at Oslo Universtity in December to run an experimental protocol with pigs within SPINSTIM project framework.
10.3 National initiatives
-
Inria AeX HumanLab Inria
https://project.inria.fr/humanlabinria/
Humanlabs are collaborative spaces for digital fabrication or repair of objects, open to people with disabilities to enable them to appropriate technology for their own use. Inria’s HumanLab contributes to meeting the needs expressed by individuals with disabilities within the framework of the Humanlabs network or via clinical partners. Our action is part of a frugal and opensource innovation approach and aims to implement the scientific and technological know-how of Inria’s staff to meet specific needs.
-
ANR Grasp-It (2019-2023)
The funded ANR project GRASP-IT aims to recover upper limb control improving the kinesthetic motor imagery (KMI) generation of post-stroke patients using a tangible and haptic interface within a gamified Brain-Computer Interface (BCI) training environment.
-
Fondation ARC pour la recherche sur le Cancer : Guiding brain tumor surgery in real time using electrophysiology.
François BonnetBlanc, 412k€ pour 3 ans. During the resection of brain tumors, the neurosurgeon has substantial imaging data allowing him/her to plan his gesture upstream. However, during the actual surgical gesture, in real time, this imaging becomes ineffective due to the deformation of the brain (so called brain shift). It is then possible to use direct electrical stimulation of the brain in an awake patient who cooperates with the neurosurgeon to determine the functional areas and those which are not. When patients are under general anesthesia this possibility no longer exists. We have planned to use the electrophysiology evoked by the direct electrical stimulation (DES) of the brain during brain surgery to diagnose and determine the location the tumor and the anatomical connectivity on-line in order to guide the surgery in awake patients or under general anesthesia. This need to go beyond the proof of concept, we have alrealdy performed, and necessitate to address and solve some methodological challenges. At a fondamental level, this will also help to better understand the electrophysiological effect of DES in order to optimize its use.
-
LABEX NUMEV - MEDITAPARK project
Collaboration with Montpellier Hospital (Neurology service) and the Montpellier Mindfulness Center to analyze the impact of meditation on upper limb tremor.
10.4 Regional initiatives
-
SPINSTIM I-SITE MUSE COMPANIES AND CAMPUS grant (ended 31-12-2021)
Collaboration with academic local partners (CHU, IES) and NEURINNOV company on the spinal stimulation for bladder and bowel functions restoration. This is linked to an ongoing collaboration with Oslo University (Norway).
-
AGILISTIM I-SITE MUSE grant - Soutien à la recherche
AGILISTIM proposes to implant 3 epineural electrodes around the median, radial and ulnar nerves, just above the elbow of volunteer participants with complete tetraplegia for 30 days. The multi-contact neural stimulation will synergistically activate the forearm muscles to trigger: hand opening, a digito-palmar grip or a functional terminal grip. The project must consolidate and extend the scientific results of the previous work and the innovative technologies which result from it. It should allow to reach a crucial proof-of-concept stage before the development of a unique finalized product responding to an unsolved need in order to improve the quality of life and the autonomy of the users.
11 Dissemination
11.1 Promoting scientific activities
11.1.1 Scientific events: organisation
Member of the organizing committees
- Christine Azevedo was member of the organizing committee of 24th Annual IFESS at Virtual RehabWeek 2021.
11.1.2 Scientific events: selection
Member of the conference program committees
- Christine Azevedo was member of the program committee and reviewer of 24th Annual IFESS at Virtual RehabWeek 2021.
- David Guiraud was Theme editor (Theme 6) of the IEEE EMB annual conference 2021.
11.1.3 Journal
Member of the editorial boards
- David Guiraud is associate Editor at Journal of Neural Engineering
- David Guiraud is associate Editor at Medical and Biological Engineering and Computing
- Christine Azevedo is Review Editor Frontiers Neuroscience - Neuroprosthetics
- Christine Azevedo represents Inria in the ERCIM News Journal editorial Board
Reviewer - reviewing activities
- Christine Azevedo was reviewer for IEEE TNSRE (Transactions on neural systems and rehabilitation engineering), SENSORS MDPI, Frontiers in Neurorobotics Frontiers in Neuroscience, Journal of NeuroEngineering and Rehabilitation...
- David Guiraud was reviewer for IEEE : TNSRE, TMECH, TBME, RA, TASE, JBHI... and JNE, MEP, JNM, MBEC, CBM...
- Thomas Guiho was reviewer for IEEE TNSRE (Transactions on neural systems and rehabilitation engineering), Journal of Neural Engineering, Journal of Neurotrauma and MBEC (Medical & Biological Engineering & Computing)
- Lucas Fonseca was reviewer for IEEE EMBC (Engineering in Medicine and Biology Society Conference) and JCAE (Journal of Control, Automation and Electrical Systems)
11.1.4 Invited talks
- Thomas Guiho presented his work at the 10th NUMEV scientific days. Talk entitled: “Spinal cord stimulation to restore functions in people with spinal cord injury – a highly multidisciplinary challenge”
- Christine Azevedo and Charles Fattal presented AGILIS project at the Cyber Days in Lyon. Talk entitled: “Restoring functional grasping in individuals with complete tetraplegia using neural stimulation.” https://lyon-cyber-days.sciencesconf.org/
- David Guiraud presented AGILIS project within livestorm INRIA coferences.
11.1.5 Leadership within the scientific community
Christine Azevedo is member of IFESS society board.
11.1.6 Scientific expertise
- Christine Azevedo reviewed a Research project for Natural Sciences and Engineering Research Council of Canada (NSERC) - Discovery Grant proposal.
- Christine Azevedo was expert for the French call for proposals "Appel à Projet RIN RECHERCHE EMERGENTS 2021."
- David Guiraud was reviewer of the ANR-FNS (Switzerland) common call in 2021.
11.1.7 Research administration
- Christine Azevedo is a member of COERLE (Inria Commité d'éthique)
- Christine Azevedo is a member of NICE committee, a subgroup of Sophia teamp projects committee (CEP) 7
- Christine Azevedo participated into the Selection committee of a Professor at ENS de Lyon (April 2021)
- Christine Azevedo participated into the INRIA Selection committee Recruitment campaign for Reserachers with disabilities
- Thomas Guiho is responsible for the “Neuroprostheses” teaching unit. This unit is an option common to all the masters of the ICT for health training package.
11.2 Teaching - Supervision - Juries
11.2.1 Teaching
- Master biology and health: Christine Azevedo, Thomas Guiho, David Guiraud, “Bionic approaches: Electrical stimulation in rehabilitation, sensory feedback restoration and BCI” 4.5h, M2, Montpellier University, France
- Master ICT for Health, Neuroprostheses option: François Bailly, “Biomechanics”, 3h, M2, Montpellier University, France
- Master ICT for Health, Neuroprostheses option: Thomas Guiho, “Neuroanatomy”, 3h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Ronan Le Guillou, “Control basics and signal processing”, 9h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Olivier Rossel, “Signal processing and experimental set-up”, 4.5h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Felix Schlosser-Perrin, “Electrophysiological mapping during awake brain surgery”, 3h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Lucie William, “Spontaneous and evoked muscle activity”, 3h, M2, Montpellier, France
- Master Sciences & Numérique pour la Santé (SNS), "Structure et Problématique de Santé" option: Lucie William, "The neuron in its environment", 1.5h, Montpellier University, France.
- David Guiraud was invited to the winter school organized by CNRS on "Interfaces"
11.2.2 Supervision
- PhD in progress : Lucie William, "Selective implanted neural stimulation to recover the prehension for quadriplegic", University of Montpellier-Inria-NEURINNOV, october 2019-March 2023, supervised by David Guiraud and Christine Azevedo
- PhD in progress : Hélène Moron, MD, "Jitter of MUAP measured through needle EMG used as a biomearker of the Botulin toxin effect", University of Montpellier-Inria, october 2019-september 2022, supervised by David Guiraud and Arnaud Dupeyron.
- PhD in progress : Clément Trotobas, "Design of arm assistive technologies", University of Montpellier-Inria-Dayton University, september 2020-september 2023, supervised by Christine Azevedo and Andrew Murray (Dayton Univ)
- PhD in progress : Ronan Le Guillou, "Design of a wearable neuroprosthetic solution for arm rehabilitation in post-stroke hemiplegia", University of Montpellier-Inria-CHU Toulouse, December 2020-December 2023, supervised by Christine Azevedo and David Gasq (CHU Toulouse)
- PhD in progress : Félix Schlosser-Perrin, " Modélisation des effets électrophysiologiques de la stimulation électrique sur le cerveau et preuves expérimentales en chirurgie des tumeurs cérébrales : variation de l’intensité, de la distance inter-électrode et la largeur du pulse de stimulation", University of Montpellier, september 2021-september 2024, supervised by François BonnetBlanc and Emmanuel Mandonnet (PU-PH en Neurochirurgie à l'APHP)
11.2.3 Juries
- Christine Azevedo participated in Fernanda Rodrigues (University Federal of Minas Gerais, Brazil) PhD defense, September 30th: "HYBRID ROBOTIC SYSTEM FOR REABILITATION OF THE TOP MEMBER OF POST-STEPHALIC VASCULAR STroke INDIVIDUALS: User-Centered Design.3
- Christine Azevedo participated in Tiago Coelho (University Federal of Minas Gerais, Brazil) PhD Qualification defense, November 25th: "Development and application of a high-capacity Functional Electrical Stimulation system for assisted cycling and the impact of different training programs on the physical conditioning of a subject with paraplegia."
11.3 Popularization
11.3.1 Internal or external Inria responsibilities
Christine Azevedo and Roger Pissard-Gibollet (SED Grenoble) coordinate the HumanLab Inria action https://project.inria.fr/humanlabinria/.
11.3.2 Articles and contents
Christine Azevedo Portrait in A.N.T.S association https://ants-asso.com/vie-asso/portrait/christine-azevedo-coste/
11.3.3 Education
- Christine Azevedo gives sessions of programming initiation with Thymio Robot in a middle school class (Collège Léon Cordas, Montpellier) (8 hours)
- Christine Azevedo presented the job of researcher at Lycée Joliot Curie High School (Sète) during a day dedicated to women en engineering position (6 hours).
11.3.4 Interventions
- Lucie William participated into "Ma thèse en 180s" event and was finalist at the regional level.
- Christine Azevedo and Roger Pissard-Gibollet (SED Grenoble) presented the HumanLab Inria action (September 14) to all members of the institute during a videoconference.
12 Scientific production
12.1 Major publications
- 1 articleElectrophysiological Mapping During Brain Tumor Surgery: Recording Cortical Potentials Evoked Locally, Subcortically and Remotely by Electrical Stimulation to Assess the Brain Connectivity On-line.Brain Topography: a Journal of Cerebral Function and Dynamics2020
- 2 articleTraining with FES-assisted cycling in a subject with spinal cord injury: Psychological, physical and physiological considerations.Journal of Spinal Cord MedicineJuly 2018, 1-12
- 3 articleImpact of direct epispinal stimulation on bladder and bowel functions in pigs: A feasibility study.Neurourology and Urodynamics371January 2018, 138-147
- 4 articleSensory feedback restoration in leg amputees improves walking speed, metabolic cost and phantom pain.Nature Medicine259September 2019, 1356-1363
- 5 articleEnhancing functional abilities and cognitive integration of the lower limb prosthesis.Science Translational Medicine11512October 2019
- 6 articleA phantom axon setup for validating models of action potential recordings.Medical and Biological Engineering and Computing1042016, 671-678
- 7 articleSelective neural electrical stimulation restores hand and forearm movements in individuals with complete tetraplegia.Journal of NeuroEngineering and Rehabilitation171May 2020, 66-78
- 8 articleA novel EMG interface for individuals with tetraplegia to pilot robot hand grasping.IEEE Transactions on Neural Systems and Rehabilitation Engineering2622018, 291-298
- 9 articleModel-Based Design and Experimental Validation of Control Modules for Neuromodulation Devices.IEEE Transactions on Biomedical Engineering637June 2016, 1551-1558
- 10 articleCase report: remote neuromodulation with direct electrical stimulation of the brain, as evidenced by intra-operative EEG recordings during wide-awake neurosurgery.Clinical NeurophysiologyLetter to the editorNovember 2015, 1752-1754
12.2 Publications of the year
International journals
Scientific book chapters
Other scientific publications
12.3 Cited publications
- 24 articleBenefits of 1-year home training with FES cycling in paraplegia during Covid-19 crisis: case report.American Journal of Physical Medicine and RehabilitationPublish Ahead of PrintSeptember 2021
- 25 articleSacral Anterior Root Stimulation (SARS) and Visceral Function Outcomes in Spinal Cord Injury--A Systematic Review of the Literature Over Four Decades.World NeurosurgerySeptember 2021
- 26 articleA Novel Framework for Quantifying Accuracy and Precision of Event Detection Algorithms in FES-Cycling.Sensors21132021, 1-13
- 27 miscEffectiveness of hybrid robotic rehabilitation system on upper limb recovery of people with central injuries: a systematic review with meta-analysis.The systematic review requires a strict methodology and the best practice is to create and register a protocol, since the systematic review with design and compliance with the protocol has better quality and has less risk for reporting bias. Protocols include the research question, team members, search strategy, databases to search, inclusion and exclusion criteria, quality assessment tool, data extraction template, software, and more. Thereby, the systematic review developed by the CAMIN team ``Effectiveness of hybrid robotic rehabilitation system on upper limb recovery of people with central injuries: a systematic review with meta-analysis'' created a protocol and published it in the International Prospective Register of Systematic Reviews - PROSPERO an international database of prospectively registered systematic reviews in health and social care. PROSPERO aims to provide a comprehensive listing of systematic reviews registered at inception, to help to avoid unplanned duplication, and to provide transparency in the review process to minimize reporting bias by enabling comparison of the completed review with what was planned in the protocol.~Registration in PROSPERO involves the submission and publication of key information about the design and conduct of a systematic review. Key features from the review protocol are recorded and maintained as a permanent record in PROSPERO and records are published on an open-access electronic database. This online database is produced by~Centre for Reviews and Dissemination~(CRD) at the~University of York~in~England~and funded by the National Institute for Health Research (NIHR).January 2021
- 28 articleStandardizing fatigue-resistance testing during electrical stimulation of paralysed human quadriceps muscles, a practical approach.Journal of NeuroEngineering and Rehabilitation1811January 2021