
Keywords
Computer Science and Digital Science
- A1.2. Networks
- A1.2.5. Internet of things
- A1.2.6. Sensor networks
- A1.2.7. Cyber-physical systems
- A1.3. Distributed Systems
- A1.4. Ubiquitous Systems
- A2.3. Embedded and cyber-physical systems
- A2.3.2. Cyber-physical systems
- A2.5.1. Software Architecture & Design
- A2.5.3. Empirical Software Engineering
- A2.5.4. Software Maintenance & Evolution
- A2.6. Infrastructure software
- A2.6.1. Operating systems
- A2.6.2. Middleware
- A4.8. Privacy-enhancing technologies
- A5.11. Smart spaces
- A5.11.1. Human activity analysis and recognition
- A5.11.2. Home/building control and interaction
Other Research Topics and Application Domains
- B3.1. Sustainable development
- B3.1.1. Resource management
- B4.4. Energy delivery
- B4.4.1. Smart grids
- B4.5.2. Embedded sensors consumption
- B6.1. Software industry
- B6.1.1. Software engineering
- B6.1.2. Software evolution, maintenance
- B6.2.2. Radio technology
- B6.3.3. Network Management
- B6.4. Internet of things
- B7.2. Smart travel
- B7.2.1. Smart vehicles
- B7.2.2. Smart road
- B8.1. Smart building/home
- B8.1.1. Energy for smart buildings
- B8.1.2. Sensor networks for smart buildings
- B8.2. Connected city
- B8.5.2. Crowd sourcing
- B8.5.3. Collaborative economy
- B9.8. Reproducibility
- B9.10. Privacy
1 Team members, visitors, external collaborators
Research Scientists
- Paul Couderc [Inria, Researcher]
- Christophe Couturier [IMT Atlantique, Researcher]
Faculty Members
- Jean-Marie Bonnin [Team leader, IMT Atlantique, Professor, HDR]
- Yoann Maurel [Univ de Rennes I, Associate Professor]
- Frédéric Weis [Univ de Rennes I, Associate Professor, HDR]
Post-Doctoral Fellow
- Laudin Molina [IMT Atlantique]
PhD Student
- Juliette Grosset [IMT / ECAM Rennes, From Sept 2021]
Technical Staff
- Elisa Blanchard [IMT Atlantique, Engineer, until Aug 2021]
- Elodie Duroy [IMT Atlantique / YoGoKo, Engineer, From Sept 2021]
- Nicolas Harel [Inria, Engineer, until Nov 2021]
Interns and Apprentices
- Joseph Cabrita [École normale supérieure de Rennes, from Feb 2021 until Jul 2021]
- Paul Gougeon [Univ de Rennes I, from Jun 2021 until Aug 2021]
- Nathan Perier [Univ de Rennes I, from Jun 2021 until Aug 2021]
Administrative Assistants
- Cecile Bouton [Inria, from Feb 2021 until Aug 2021]
- Fabienne Cuyollaa [Inria, until Jun 2021]
- Gwenaelle Lannec [Inria, from Sep 2021]
2 Overall objectives
2.1 Presentation
The technologies necessary for the development of pervasive applications are now widely available and accessible for many uses: short/long-range and low energy communications, a broad variety of visible (smart objects) or invisible (sensors and actuators) objects, as well as the democratization of the Internet of Things (IoT). Large areas of our living spaces are now instrumented. The concept of Smart Spaces is about to emerge, based upon both massive and apposite interactions between individuals and their everyday working and living environments: residential housing, public buildings, transportation, etc. The possibilities of new applications are boundless. Many scenarios have been studied in laboratories for many years and, today, a real ability to adapt the environment to the behaviors and needs of users can be demonstrated. However mainstream pervasive applications are barely existent, at the notable exception of the ubiquitous GPS-based navigators. The opportunity of using vast amounts of data collected from the physical environments for several application domains is still largely untapped. The applications that interact with users and act according to their environment with a large autonomy are still very specialized. They can only be used in the environment they had especially been developed for (for example "classical" home automation tasks: comfort, entertainment, surveillance). They are difficult to adapt to increasingly complex situations, even though the environments in which they evolve are more open, or change over time (new sensors added, failures, mobility etc.).
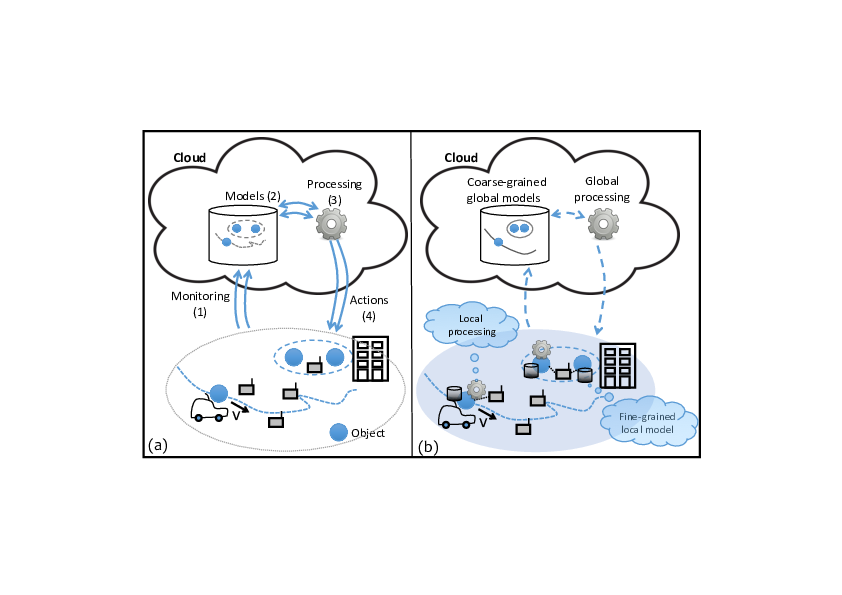
Developing applications and services that are ready to deploy and evolve in different environments should involve a significant cost reduction. Unfortunately, designing, testing and ensuring the maintenance as well as the evolution of a pervasive application remain very complex. In our view, the lack of resources by which properties of the real environment are made available to application developers is a major concern. Building a pervasive application involves implementing one or more logical control loops which include four stages (see figure 1-a): (1) data collection in the real environment, (2) the (re)construction of information that is meaningful for the application and (3) for decision making, and finally, (4) action within the environment. While many decision-algorithms have been proposed, the collection and construction of a reliable and relevant perception of the environment and, in return, action mechanisms within the environment still pose major challenges that the Tacoma/Ease project is prepared to deal with.
Most current solutions are based on a massive collection of raw data from the environment, stored on remote servers. Figure 1-a illustrates this type of approach. Exposure of raw sensor values to the decision-making process does not allow to build relevant contexts that a pervasive application actually needs in order to shrewdly act/react to changes in the environment. So, the following is left up to the developer:
- To characterize more finely raw data beyond its simple value, for example, the acquisition date, the nature of network links crossed to access the sensor, the durability and accuracy of value reading, etc.
- To exploit this raw data to calculate a relevant abstraction for the application, such as, whether the room is occupied, or whether two objects are in the same physical vicinity.
- To modify the environment when possible.
Traditional software architectures isolate the developer from the real environment that he has to depict according to complex, heavy and expensive processes. However, objects and infrastructure integrated into user environments could provide a more suitable support to pervasive applications: description of the actual system's state can be richer, more accurate, and, simultaneously, easier to handle; the applications' structure can be distributed by being built directly into the environment, facilitating scalability and resilience by the processing autonomy; finally, moving processing closer to the edge of the network avoids major problems of data sovereignty and privacy encountered in infrastructures very dependent on the cloud. We strongly believe in the advantages of specific approaches to the fields of edge computing and fog computing, which will reveal themselves with the development of Smart Spaces and an expansive growth of the number of connected objects. Indeed, ensuring the availability and reliability of systems that remain frugal in terms of resources will become in the end a major challenge to be faced in order to allow proximity between processing and end-users. Figure 1-b displays the principle of "using data at the best place for processing". Fine decisions can be made closer to the objects producing and acting on the data, local data characterization and local processing de-emphasize the computing and storage resources of the cloud (which can be used for example to store selected/transformed data for global historical analysis or optimization).
Ease aims at developing a comprehensive set of new interaction models and system architectures to considerably help pervasive application designers in the development phase with the side effect to ease the life cycle management. We follow two main principles:
- Leveraging local properties and direct interactions between objects, we would be able to enrich and to locally manage data produced in the environment. The application would then be able to build their knowledge about their environment (perception) in order to adjust their behavior (e.g. level of automation) to the actual situation.
- Pervasive applications should be able to describe requirements they have on the quality of their environmental perception. We would be able to achieve the minimum quality level adapting the diversity of the sources (data fusion/aggregation), the network mechanisms used to collect the data (network/link level) and the production of the raw data (sensors).
3 Research program
3.1 Collecting pertinent information
In our model, applications adapt their behavior (for instance, the level of automation) to the quality of their perception of the environment. This is important to alleviate the development constraint we usually have on automated systems. We "just" have to be sure a given process will always operate at the right automation level given the precision, the completeness or the confidence it has on its own perception. For instance, a car passing through a crossing would choose its speed depending on the confidence it has gained during perception data gathering. When it has not enough information or when it could not trust it, it should reduce the automation level, therefore the speed, to only rely on its own sensors. Such an adaptation capability shift the requirements from the design and deployment (availability, robustness, accuracy, etc.) to the assessment of the environment perception which we aim to facilitate in this first research axis.
Data characterization. The quality (freshness, accuracy, confidence, reliability, confidentiality, etc.) of the data are of crucial importance to assess the quality of the perception and therefore to ensure proper behavior. The way data is produced, consolidated, and aggregated while flowing to the consumer has an impact on its quality. Moreover, part of these quality attributes requires to gather information at several communication layers from various entities. For this purpose, we want to design lightweight cross-layer interactions to collect relevant data. As a "frugality" principle should guide our approach, it is not appropriate to build all the attributes we can imagine. It is therefore necessary to identify attributes relevant to the application and to have mechanisms to activate/deactivate at run-time the process to collect them.
Data fusion. Raw data should be directly used only to determine low-level abstraction. Further help in abstracting from low-level details can be provided by data fusion mechanisms. A good (re)construction of meaningful information for the application reduces the complexity of the pervasive applications and helps the developers to concentrate on the application logic rather than on the management of raw data. Moreover, the reactivity required in pervasive systems and the aggregation of large amounts of data (and its processing) are antagonists. We study software services that can be deployed closer to the edge of the network. The exploration of data fusion techniques will be guided by different criteria: relevance of abstractions produced for pervasive applications, anonymization of exploited raw data, processing time, etc.
Assessing the correctness of the behavior. To ease the design of new applications and to align the development of new products with the ever faster standard developments, continuous integration could be used in parallel with continuous conformance and interoperability testing. We already participate in the design of new shared platforms that aim at facilitating this by providing remote testing tools. Unfortunately, it is not possible to be sure that all potential peers in the surrounding have a conforming behavior. Moreover, upon failure or security breach, a piece of equipment could stop operating properly and lead to global mis-behavior. We want to propose conceptual tools for testing devices at runtime in the environment. The result of such conformance or interoperability tests could be stored safely in the environment by an authoritative testing entity. Then the application could interact with the device with higher confidence. The confidence level of a device could be part of the quality attribute of the information it contributed to generate. The same set of tools could be used to identify misbehaving device for maintenance purposes or to trigger further testing.
3.2 Building relevant abstraction for new interactions
The pervasive applications are often designed in an ad hoc manner depending on the targeted application area. Ressources (sensors / actuators, connected objets, etc.) are often used in silos which complexifies the implementation of rich pervasive computing scenarios. In the second research axis, we want to get away from technical aspects to identify common and reusable system mechanisms that could be used in various applications.
Tagging the environment. Information relative to the environment could be stored by the application itself, but it could be complex to manage for mobile applications since it could cross a large number of places with various features. Moreover the developer has to build his own representation of information especially when he wants to share information with other instances of the same application or with other applications. A promising approach is to store and to maintain this information associated to an object or to a place, in the environment itself. The infrastructure should provide services to application developers: add/retrieve information in the environment, share information and control who can access it, add computed properties to object for further usage. We want to study an extensible model to describe and augment the environment. Beyond a simple distributed storage, we have in mind a new kind of interaction between pervasive applications and the changing environment and between applications themselves.
Taking advantages of the spatial relationships. To understand the world they have to interact with, pervasive applications often have to (re)build a model of it from the exchange they have with others or from their own observations. A part of the programmer's task consists in building a model of the spatial layout of the objects in the surrounding. The term layout can be understood in several ways: the co-location of multiple objects in the same vicinity, the physical arrangement of two objects relative to each other, or even the crossing of an object of a physical area to another, etc. Remotely determining these spatial properties (see figure 1-a) is difficult without exchanging a lot of information. Properties related to the spatial layout are far easier to characterize locally. They could be abstracted from the interaction pattern without any complex virtual representation of the environment (see figure 1-b). We want to be able to rely on this type of spatial layout in a pervasive environment. In the prior years, the members of Ease already worked on models for processing object interactions in the physical world to automatically trigger processing. This was the case in particular of the spatial programming principle: physical space is treated as a tuple-space in which objects are automatically synchronized according to their spatial arrangement. We want to follow this approach by considering richer and more expressive programming models.
3.3 Acting on the environment
The conceptual tools we aim to study must be frugal: they use as few resources as possible, while having the possibility to use much more when it is required. Data needed by an application is not made available for "free"; for example, it costs energy to measure a characteristic of the environment, or to transmit it. So this "design frugality" requires a fine-grained control on how data is actually collected from the environment. The third research axis aims at designing solutions that give this control to application developers by acting on the environment.
Acting on the data collection. We want to be able to identify what information are really needed during the perception elaboration process. If a piece of data is missing to build a given information with the appropriate quality level, the data collection mechanism should find relevant information in the environment or modify the way it aggregates it. These could lead to a modification of the behavior of the network layer and the path the piece of data uses in the aggregation process.
Acting on object interactions. Objects in the environment could adapt their behavior in a way that strongly depends on the object itself and that is difficult to generalize. Beyond the specific behaviors of actuators triggered through specialized or standard interfaces, the production of information required by an application could necessitate an adaptation at the object level (eg. calibration, sampling). The environment should then be able to initiate such an adaption transparently to the application, which may not know all objects it passes by.
Adapting object behaviors. The radio communication layers become more flexible and able to adapt the way they use energy to what is really required for a given transmission. We already study how beamforming techniques could be used to adapt the multicast strategy for video services. We want to show how playing with these new parameters of transmissions (e.g. beamforming, power, ...) allows to control spatial relationships objects could have. There is a tradeoff to find between the capacity of the medium, the electromagnetic pollution and the reactivity of the environment. We plan to extend our previous work on interface selection and more generally on what we call opportunistic networking.
4 Application domains
4.1 Pervasive applications in Smart Building
A Smart Building is a living space equipped with information-and-communication-technology (ICT) devices conceived to collaborate in order to anticipate and respond to the needs of the occupants, working to promote their comfort, convenience, security and entertainment while preserving their natural interaction with the environment.
The idea of using the Pervasive Computing paradigm in the Smart Building domain is not new. However, the state-of-the-art solutions only partially adhere to its principles. Often the adopted approach consists in a heavy deployment of sensor nodes, which continuously send a lot of data to a central elaboration unit, in charge of the difficult task of extrapolating meaningful information using complex techniques. This is a logical approach. Ease proposed instead the adoption of a physical approach, in which the information is spread in the environment, carried by the entities themselves, and the elaboration is directly executed by these entities "inside" the physical space. This allows performing meaningful exchanges of data that will thereafter need a less complicated processing compared to the current solutions. The result is a smart environment that can, in an easier and better way, integrate the context in its functioning and thus seamlessly deliver more useful and effective user services. Our contribution aims at implementing the physical approach in a smarter environment, showing a solution for improving both comfort and energy savings.
4.2 Automation in Smart Cities
The domain of Smart Cities is still young but it is already a huge market which attracts number of companies and researchers. It is also multi-fold as the words "smart city" gather multiple meanings. Among them one of the main responsibilities of a city, is to organize the transportation of goods and people. In intelligent transportation systems (ITS), ICT technologies have been involved to improve planification and more generally efficiency of journeys within the city. We are interested in the next step where efficiency would be improved locally relying on local interactions between vehicles, infrastructure and people (smartphones).
For the future autonomous vehicle are now in the spotlight, since a lot of works has been done in recent years in automotive industry as well as in academic research centers. Such unmanned vehicles could strongly impact the organisation of the transportation in our cities. However, due to the lack of a definition of what is an "autonomous" vehicle, it is still difficult to see how these vehicles will interact with their environment (eg. road, smart city, houses, grid, etc.). From augmented perception to fully cooperative automated vehicle, the autonomy covers various realities in terms of interaction the vehicle relies on. The extended perception relies on communication between the vehicle and surrounding roadside equipments. That helps the driving system to build and maintain an accurate view of the environment. But at this first stage the vehicle only uses its own perception to make its decisions. At a second stage, it will take advantages of local interaction with other vehicles through car-to-car communications to elaborate a better view of its environment. Such "cooperative autonomy" does not try to reproduce the human behavior anymore, it strongly relies on communication between vehicles and/or with the infrastructure to make decision and to acquire information on the environment. Part of the decision could be centralized (almost everything for an automatic metro) or coordinated by a roadside component. The decision making could even be fully distributed but this puts high constraints on the communications. Automated vehicles are just an example of smart city automated processes that will have to share information within the surrounding to make their decisions.
4.3 Pervasive applications in uncontrolled environnements
Some limitations of existing RFID technology become challenging: unlike standard RFID application scenarios, pervasive computing often involves uncontrolled environment for RFID, where tags and reader have to operate in much more difficult situations that those usually encountered or expected for classical RFID systems.
RFID technology is to avoid missing tags when reading multiple objects, as reading reliability is affected by various effects such as shadowing or wave power absorption by some materials. The usual applications of RFID operate in a controlled environment in order to reduce the risk of missing tags while scanning objects.
In pervasive computing applications, a controlled reading environment is extremely difficult to achieve, as one of the principles is to enhance existing processes "in situ", unlike the controlled conditions that can be found in industrial processes. Consider for example a logistic application, where RFID tags could be used on items inside a package in order to check for its integrity along the shipping process. Tags would likely be placed randomly on items inside the package, and reading conditions would be variable depending on where the package is checked.
RFID operation in uncontrolled environments is challenging because RFID performance is affected by multiple parameters, in particular:
- Objects materials (to which tags are attached to),
- Materials in the surrounding environment,
- RFID frequency spectrum,
- Antenna nature and placement with respect to the tags.
In controlled environment, the difficulty to read tags can be limited by using the appropriate parameters to maximize the RFID performance for the application. But in many cases, it is needed to read large number of objects of various nature, arranged randomly in a given area or container. Most pervasive computing applications fall in this context.
4.4 Data collection for precision agriculture
The use of sensor networks can be useful to support environmentally friendly production in the agricultural sector: monitoring of plant cover, plant disease detection, fine-grained plant treatments. Nevertheless, the digital tools used for this type of deployment were not designed to be broadly usable by non-specialists and have not yet established themselves among the agricultural community.
In addition, in agriculture as in many fields, the use of digital technology has mostly been carried out under the paradigm of massive data collection: logging as much information as possible, storing the data and then implementing statistical and IT methods to extract meaningful information. This approach raises problems of energy storage and consumption, increasing the environmental footprint of digital technology and limiting deployments of operational and sustainable systems.
Very small connected objects are now able to execute software codes, to drive many sensors, to send data pair with other devices in their neighborhood and to pre-process data for cleaning/aggregation. Our ambition is to optimize the crop monitoring system from a data and energy perspectives, using generic software mechanisms as close as possible to the sensor node and introducing “intelligence” into the data collection mechanisms.
Our approach is based on the quality of the data produced by the sensor nodes distributed in the environment. Data quality can be broken down into different dimensions: precision, confidence, durability, etc. Characterizing data quality requires the developer of an application to analyze and possibly control how this data is produced and collected. Usually, this task is performed on an ad hoc basis, with a strong dependence on the objectives of the data collection and not very reproducible as the environment in which the sensors are deployed evolves. The challenge is to offer mechanisms that will adapt, without additional software developments, to the many field experiments carried out for precision agriculture.
5 New software and platforms
During this year, we focused our development efforts on two platforms: AgriSense for crop monitoring and the BLE platform, which aims to explore the possibilities offered by low-level radio mechanisms.
5.1 New software
5.1.1 THEGAME
-
Keyword:
Contextual service
-
Scientific Description:
Context-aware applications have to sense the environment in order to adapt themselves and provide with contextual services. This is the case of Smart Homes equipped with sensors and augmented appliances. However, sensors can be numerous, heterogeneous and unreliable. Thus the data fusion is complex and requires a solid theory to handle those problems. The aim of the data fusion, in our case, is to compute small pieces of context we call context attributes. Those context attributes are diverse and could be for example the presence in a room, the number of people in a room or even that someone may be sleeping in a room. For this purpose, we developed an implementation of the belief functions theory (BFT). THE GAME (THeory of Evidence in a lanGuage Adapted for Many Embedded systems) is made of a set of C-Libraries. It provides the basics of belief functions theory, computations are optimized for an embedded environment (binary representation of sets, conditional compilation and diverse algorithmic optimizations).
THE GAME is published under apache licence (https://github.com/bpietropaoli/THEGAME/ ). It is maintained and experimented by Aurélien Richez within a sensor network platform developed by TACOMA since June 2013.
-
Functional Description:
THEGAME is a set of software services for detecting different types of situation in a building (presence in a room, activity level, etc.) based on a set of raw data sourced from all sorts of sensors. Written in C or Java, it can be integrated in an embedded computer: tablet, smartphone, box, etc., and can be connected to different sensor networks. It can be used to implement context-aware services: for example, to alert the user if s/he forgets to close a window when leaving the building, or to turn off the heating in an empty room, etc.
- URL:
-
Contact:
Frédéric Weis
-
Participants:
Aurélien Richez, Bastien Pietropaoli
5.2 New platforms
5.2.1 Platform Pervasive_RFID
Participants: Paul Couderc.
Keywords: Composite objects, RFID
- Partner: Univ. Rennes 1 (IETR - lab bringing together researchers in the electronics and telecommunications)
- Contact: Paul Couderc
The RFID experiment testbed has been designed and deployed in collaboration with IETR (see Figure 2). This system allows both interactive testing as well as long running experiments of RFID reading protocols. It comprises a software platform allowing fine control over all the dynamic aspects influencing RFID readings: movements for target and antenna, RFID reader configuration, and smart antenna configuration (diversity and power control).

Schematic overview of RFID platform
5.2.2 AgriSense
Participants: Nicolas Harel, Frédéric Weis.
Keywords: Smart Agriculture, Low-end IoT devices, RIOT, WSNs
- Partner: Inria - INRAe
- Contact: Frédéric Weis
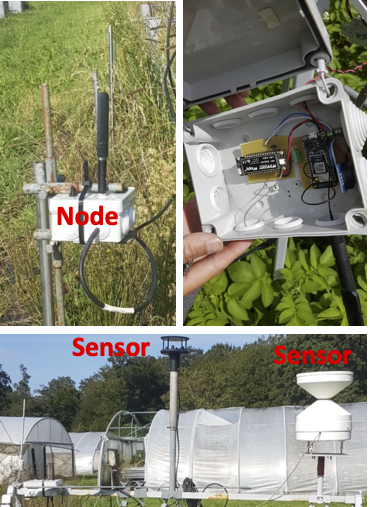
This platform is developed in the framework of a collaboration between EASE and the Demecology (Dynamics-Evolution-Modeling-Ecology) team of INRAe, which carries out work in plant epidemiology. The general objective is to develop precision monitoring solutions for their experimental vegetal plots.
The use of these very small objects (microcontrollers - MCU) for crop monitoring is promising. But it poses different problems, which we studied using this platform. Our hardware architecture is based on a very generic “on-the-shelf” MCU. The latter offers a fairly limited number of I/O interfaces: GPIO port, UART, etc. However, the environmental sensors used for crop monitoring have very variable features: digital or analog, using specialized communication protocols (e.g. SDI12), and can be particularly energy intensive (e.g. dielectric sensors measuring wetness). To address this issue, we designed an hardware architecture ensuring a stable link between the MCU and different types of sensors. This architecture is based on the design of a low-cost PCB, allowing to efficiently operate any type of sensors. This architecture is open (we are talking about an "open PCB"), very low cost, and can be easily adapted to different MCU architectures.
Our hardware and sofware architectures has been validated in a real field with different sensors. The experimentation lasted several weeks (see Figure 3). Our recent results with this platform are presented in the section 6.
5.2.3 BLE platform
Participants: Elodie Blanchard, Christophe Couturier, Laudin Molina.
Keywords: Bluetooth Low Energy, Angle of Arrivals AoA), capture effect
- Partner: IMT-A
- Contact: Christophe Couturier
We used Bluetooth Low Energy (BLE) to support our investigations on intrinsic localization capabilities. This choice is mainly motivated by the relative easy access to low level information in the development stack, at least with some suppliers. We have designed and built a platform to conduct experiment trials in controlled scenarios as well as in the field. We worked on the characterization of opportunistic communication based on BLE advertisements and on a first evaluation of the localization precision in indoor as well as outdoor scenarios.
We used the newly built Faraday room at IMT Atlantique (see Figure 4) to evaluate the reliability and the capability of the BLE advertisements in multi-users scenarios. This allowed us to develop and validate a simulator that estimates the collision between BLE advertisements taking into account the capture effect. We shown that doing so one can increase the estimation of the actual Packet Delivery Ratio by up to 25% as compared to the pessimistic approach of basic models.
In addition, we performed an initial assessment of the BLE capability for positioning. Notably, we measured the capacity of our platform to estimate direction using BLE the angle of arrival (AoA) and the capacity to estimate proximity using the variation of the RSSI. Finally, thanks to the BLE test bed, we have increased our expertise on the BLE as well as on conducting trials on the field and on controlled scenarios.
This hard work was founded by the Chantier 3.0 project and was made possible thanks to the availability of a dedicated room in our lab. Recently, a mobile robot has been integrated into the platform. With this platform in place, we are now able investigate other information sources like Time of Flight (ToF) and to run repetitive experiments in order to identify recurrent pattern that could feed machine learning algorithm to enhance positioning accuracy.
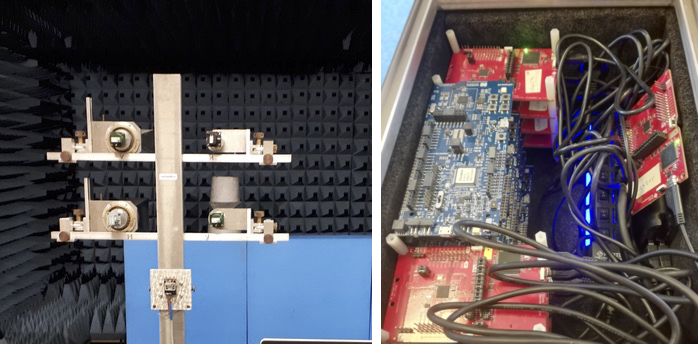
Overview of the BLE platform - experimentation in an anechoic chamber
6 New results
6.1 Location assessment from local observations
Participants: Paul Couderc [contact], Yoann Maurel.
Confidence in location is increasingly important in many applications, in particular for crowd-sensing systems integrating user contributed data/reports, and in augmented reality games. In this context, some users can have an interest in lying about their location, and this assumption has been ignored in several widely used geolocation systems because usually, location is provided by the user’s device to enhance the user’s experience. Two well known examples of applications vulnerable to location cheating are Pokemon Go and Waze.
Unfortunately, location reporting methods implemented in existing services are weakly protected: it is often possible to lie in simple cases or to emit signals that deceive the more cautious systems. For example, we have experimented simple and successful replay attacks against Google Location using this approach
An interesting idea consists in requiring user devices to prove their location, by forcing a secure interaction with a local resource. This idea has been proposed by several works in the literature; unfortunately, this approach requires ad hoc deployment of specific devices in locations that are to be "provable".
Previously, we proposed an alternative solution using passive monitoring of Wi-Fi traffic from existing routers. The principle is to collect beacon timestamp observations (from routers) and other attributes to build a knowledge that requires frequent updates to remain valid, and to use statistical test to validate further observations sent by users. Typically, older data collected by a potential attacker will allow him to guess the current state of the older location for a limited timeframe, while the location validation server will get updates allowing him to determine a probability of cheating request.The main strength is its ability to work on existing Wi- Fi infrastructures, without specific hardware. Although it does not offer absolute proof, it makes attacks much more challenging and is simple to implement.
In 2021 we explored directions to broaden the approach, by considering other radio signals in order to have a diversity of sources from which to pick the features used to generate location proof. However, many of the radio technologies examined in this survey were not as promising as hoped for the approach, because most of the observable data in the radio traffic could be either forecasted or collected from alternative sources. Radio traffic surveyed included live air traffic control, FM RDS, and 2G/3G cellular signaling. The principle remains potentially viable for other technologies, in particular traffic from sensors and IoT objects that become widely deployed.
6.2 Characterization of the capture effect on BLE transmission
Participants: Christophe Couturier [contact], Paul Couderc [contact], Laudin Molina [contact], Elodie Blanchard [contact], Jean-Marie Bonnin [contact].
The so called "capture effect" phenomena happens when a receiver manages to decode one of simultaneous or overlapping radio messages. In most of the cases, this is made possible when the Received Signal Strength (RSSI) of one signal is higher than the others. But other conditions can foster the capture effect, such as the sequence of reception (eg. higher signal first) or the capability of the receiver to detect the preamble of a new pattern while already processing another message. We investigated the impact of theses parameter on real BLE 5.1 devices in a controlled environment using our automated BLE testbed. First results of this work were documented in 4 and will hopefully lead to future publications.
In addition to this work, we developed this ad-hoc event based simulator in Python to support our research on this topic. This software enables to evaluate the impact of the capture effect on large scale populations. This can help to improve the performance estimate of applications like contact tracing (e.g. ”Tous anti COVID”), smartphone tracking (e.g. Vulnerable Road Users protection) or BLE based sensor networks. We confirmed the validity of the simulation model with real measurement on our test-bed with populations of up to 25 devices. The software sources are freely available on the INRIA Gitlab server, in order to let the community reproduce our works and possibly propose improvements. In the future, we may enrich the simulator to take into account scanning and advertising parameters in order to simulate scenarios where BLE is used for full duplex communications.
This work was funded by the Chantier 3.0 project. Both the real test-bed and the simulator enabled to validate the parameters of the Chantier 3.0 architecture.
6.3 Data Collection for Smart Agriculture
Participants: Jean-Marie Bonnin [contact], Nicolas Harel [contact], Frédéric Weis [contact].
Very small connected objects are now able to execute software codes, to drive many sensors, to send data pair with other devices in their neighborhood and to pre-process data for cleaning/aggregation. Our ambition is to optimize the crop monitoring system from a data and energy perspectives, using generic software mechanisms as close as possible to the sensor node and introducing “intelligence” into the data collection mechanisms.
To integrate software services in these nodes, we have to rely on open source operating systems providing consistent APIs & SDKs. Traditional OS such as Linux cannot run on the limited resources of low-end IoT devices. For the last year, we have focused our efforts on the deployment of an open / stable / sustainable platform exploiting low power nodes running with RIOT. RIOT is an OS developed by a growing open source community. It offers a developer-friendly programming model and APIs, similar to what is found in Linux. It is based on a micro-kernel architecture. The network stack implements the main IoT standards (6LoWPAN, IPv6, RPL, CoAP etc.). It therefore has all the characteristics of a modern OS targeting the low-end IoT nodes.
We can now rely on an open hardware and software platform:
- Offering very fine mechanisms for energy management: the developer is able to put the nodes into the deepest sleep mode, and to wake them up in a synchronized way whenever necessary. Even in the presence of a very energy-intensive sensor, consumption of a node does not exceed a few microamps.
- Accelerating the integration of complex sensors. A set of libraries facilitates interactions between hardware and OS. The sensor is seen as a simple source of data.
Some of our contributions have been integrated into the official RIOT code. We conducted an experimentation with INRAE for several weeks in an experimental crop. The results, particularly in terms of energy consumption, are very encouraging and should be published in early 2022.
This work will now continue in the framework of a joint thesis with a team from INRAE. This work should start in early 2022.
6.4 Data sharing for Smart Agriculture
Participants: Jean-Marie Bonnin [contact], Paul Couderc.
In Smart agriculture, parasites or vulnerabilities affecting only localized plants can be easily marked using tags, and used later to drive smart treatment instead of global treatment of whole area. Our approach is based on local processing stations managing wireless sensors and/or wireless data collection nodes, and an an UHF RFID based local storage infrastructure for in situ annotations and data tracking. It is directly related to the problem presented in section 3.2. It enables “self describing” capability of object/entities in an environnement, with a good spatial accuracy: it is even possible to mark different properties on several branch of a single fruit tree for example, which would not be possible with GPS based solutions.
Important component of the solution is designed within the Agri-Biot startup (see section 1) and tested in cooperation with the team, which has a strong expertise on this topic. In particular, in the Pervasive_RFID platform we studied the behavior of UHF RFID tags used adverses conditions, and developed solutions to improve RFID reading reliability in these conditions.
The RFID component of Agri-BIoT requires an extensive evaluation of the performance of UHF RFID tags in the farming context, which was largely unknown, and benchmarking existing hardware on the market. The facility developed in the Pervasive_RFID provided an excellent tool for testing and qualifying the RFID equipment to be used in Agri-BIoT, which was the purpose of the Tagri project last year.
The pilot deployment in vineyards has shown some specific requirements for location dependant annotations and worker action tracking, using tags attached to vine plants (see Figure 5). An Android application driving handheld mobile readers was developed and tested in field.

7 Bilateral contracts and grants with industry
7.1 Bilateral contracts with industry
- Project: SIMHet
- Partner: YoGoKo
Participants: Jean-Marie Bonnin.
- Starting: Nov 2015 - Ending: February 2022
- Abstract: The SIMHet project is performed in partnership with YoGoKo, a start-up that develops innovative communication solutions for cooperative intelligent transport systems. The SIMHet project aims to develop a decision making mechanism that would be integrated in the ISO/ETSI ITS communication architecture. It will allow mobile devices or mobile routers to choose the best network interface for each embedded application/flow. For example, in a vehicular environment this mechanism could manage global (Internet) and local connections for each on board device/application, in order to ensure that applications and services are always best connected. Being aware that "best" concept is context-dependent, such a decision making mechanism should take into account requirements from different actors (e.g., applications, user, network administrators) and contextual information. One of the difficulties is to take advantage of the knowledge the system could have about near future connectivity. In the vehicular context such information about the movement and the availability of network resources is available. If taking into account the future makes the decision making more complex, this could allow a better usage of network resources when they are available. Since current solutions in the market are based on very simple decisions (use WiFi if available and 3G elsewhere), this smart mechanism will give a competitive advantage for YoGoKo over its competitors.
- Project: C4M
- Partner: YoGoKo
Participants: Jean-Marie Bonnin.
- Starting: Sept 2021 - Ending: -
-
Abstract: Following the work done in the SIMEHet contract last years, we decided to launch a common lab with YoGoKo. It will take time to be fully established, but we already start to strengthen our collaboration. The name of the common lab is Cooperation for Mobility (C4M) and it aims at studying direct interactions between vehicles, with road/street infrastructure, and with pedestrian and vulnerable road user. We will mainly focus our work on the Urban ITS context but we could also be involved in evaluating V2X technologies with use-cases of interest (rail way, industry, etc.).
Using the “plan de relance” of the French government we hire for two years one Engineer in September 2021 and another one should start in March 2022. They will spend half of their time in the YoGoKo premises on YoGoKo projects and the other half with the EASE team to work on common projects. Elodie Duroy, will be mainly involved on the mechanism we need to exchange information and to deal with it in the vehicle using ML and AI technics. Rania Haj Mansour will be in charge of working on the the implementation in the linux architecture of the advanced interface selection mechanism (results of the SIMEHet project). Thanks to this tight integration within the Linux networking architecture we will perform a comprehensive evaluation of the mechanism in real situation.
- Project: Agri-BIoT
- Partners: Inria - IMT-A
Participants: Jean-Marie Bonnin, Paul Couderc.
-
Abstract: A startup project (Agri-BIoT) involving Inria and IMT Atlantique people is getting ready with edge computing solutions targeting agriculture applications. A core component of the solution is an RFID based local storage infrastructure for in situ annotations and data tracking. An important innovation in this project is to bring autonomous and efficient solutions to farmers, under their control, unlike most competitors solutions depending on remote infrastructures.
The team is contributing to this project with his experience in developing RFID based distributed storage and operating RFID in adverses conditions.
The projet has been selected and founded in the Inria Startup Studio.
More information about Agri-BIoT is available on the startup website.
We hope that the development of Agri-BIoT will provide larger testfields in real operational contexts for the solutions we developed, which could in turn facilitate new research and collaborations with the early adopters of the technology.
8 Partnerships and cooperations
8.1 International initiatives
8.1.1 Inria international partners
Informal international partners
-
University of Tokyo, Tsukada Lab
Participants: Jean-Marie Bonnin, Christophe Couturier.
- Abstract: We already organized joint seminars (Jean-Marie Bonnin went to Tokyo in February 2020 and we had a seminar between the two teams in 2021) but the current situation prevent us from developing the collaboration further. We would like to have a common PhD student who could spend part of his time on each side. Even though they are more interested in automated vehicles in urban environment, Juliette Grosset could go in Tokyo to work on some aspects of the interaction between infrastructure and autonomous vehicle that could also be useful in plant scenario. The idea is to apply cooperative perception principles to AGV. Jean-Marie Bonnin should go to Tokyo for three weeks next summer if it is not canceled like the two last years.
8.1.2 Other european programs/initiatives
-
X2Rail-3
Participants: Christophe Couturier.
- Starting: mid 2019; Ending: Dec 2023
- Partners: Thales, Alstom, Hitachi Rail STS, AZD, Bombardier, CAF, CEIT, Deutche Bahn, DLR, HaCon, Indra, Kontron, Mermec, NetworkRail, Railenium, SNCF Réseau, Trafikverkert, Siemens
-
Abstract: This European project aims to continue the research and development of key technologies to foster innovations in the field of railway signalling, telecommunication, testing methodologies and Cyber Security, as part of a longer term Shift2Rail IP2 strategy towards a flexible, real-time, intelligent traffic control management and decision support system.
The actions to be undertaken in the scope of X2Rail-3 are related to the following specific objectives:
- To improve line capacity and to achieve a significant reduction of the use of traditional train detection systems by means of the introduction of the Moving Block together with train positioning;
- To overcome the limitations of the existing communication system by adapting radio communication systems which establish the backbone for the next generation advanced rail automation systems;
- To ensure security among all connected signalling and control systems by developing new cyber security systems dedicated to railways;
- To analyse new signalling concepts (Virtual Coupling) that potentially would be able to improve line capacity, reduce LCC and enhance system reliability.
- To improve standardization and integration of the testing methodologies reducing time to market and improving effectiveness in the introduction of new signalling and supervision systems;
- To ensure the evolution and backward compatibility of ERTMS/ETCS technologies, notwithstanding of the required functional enrichment of the future signalling and control systems.
In this project, we act on behalf of the RAILENIUM IRT (as a sub-contractor). Discussions are ongoing with RAILENIUM in order to reinforce the cooperation between them and IRISA/Inria.
8.2 National initiatives
-
InDiD
Participants: Jean-Marie Bonnin.
- Starting: mid 2019; Ending: Dec 2023
- Partners: 20+ French partners including cities (Paris, Grenoble...), road operators, transport operators, academics (incl. IMT Atlantique) and industrials
- Abstract: InDiD is one of 13 French projects out of 148 European projects selected by the European Commission within the framework of the last Connecting Europe Facility (CEF) call for proposals. The project benefits from a co-funding rate of 50% on behalf of the European Union. It follows the Smart Cooperative Transport Systems projects SCOOP@F, C-ROADS France and InterCor. The project aims at expanding the coverage of use cases deployed in previous projects (emergency braking, accident, work...) and develop new use cases dealing with urban area, but also use cases of increased perception for autonomous vehicle. In addition, it deals with high definition digital mapping of the infrastructure. Connectivity along with mapping shape the digital infrastructure of tomorrow, an essential addition to the physical infrastructure. InDiD aims at continuing the deployment of Cooperatives Intelligent Transport Systems on new road experimentation sites in order to expand the services coverage offered by the infrastructure. Pilot sites are located on 4 main French geographic areas, on the Mediterranean side, in the south-west area, at the centre and in the north of France.
8.3 Regional initiatives
-
Chantier 3.0
Participants: Jean-Marie Bonnin, Christophe Couturier, Paul Couderc.
- Starting: Jan 2019; Ending : Dec 2022
- Partners: Agemos, YoGoKo, IMT Atlantique
-
Abstract: Co-founded by "Région Bretagne" Chantier 3.0 is a "PME Project" aiming at increasing safety of workers in construction sites and road works. In these scenarios, vehicles represent a danger for the workers. Knowing the position of the vehicles and workers, it is possible to alert workers who are located in a safety perimeter around the vehicles. The project addresses the challenges of 1) precise localisation with low or medium cost wearable devices and 2) of dynamically setting up a reliable communication network in harsh environments mixing indoor and outdoor conditions.
The key technologies used to solve theses issues include: fusion of localisation data (GPS, acceleration integration, location anchors, angle of arrival and time of flight of radio signals), opportunistic short range broadcast communications, ITS communication protocols and system integration. EASE brings it expertise in all of theses domains in order to enhance the reliability of the system, to make it affordable and to pave the way for its standardisation.
-
Cooperation between automated vehicles
Participants: Jean-Marie Bonnin, Christophe Couturier, Juliette Grosset.
- Starting: Sept 2021; Ending : Sept 2024
- Partners: ECAM Rennes
- Abstract: This work is co-funded by "Région Bretagne". Following the work done with TUM in the context of the SCHIEF project, we welcome a new PhD student (Juliette Grosset) in collaboration with ECAM (professor Alain-Jérôme Fougères). She will work on the interaction between Automatic Guided Vehicles (AGV) and with sensors available in the plant infrastructure. The goal is to adapt automatically the behavior of the AGV (mainly speed) to the quality of its perception of the environment and especially to its perception of the environment it cannot “see” by itself. AGVs will cooperate with the environment in order to agree on a common understanding with a higher degree of confidence. In this context, an off-board equipment deployed in the environment can provide more accurate information and serve as a mediator to ease the cooperation between AGVs. With ECAM we will work on co-simulation tools that will help us to assess the behavior of AGVs before the actual deployment of new sensors (e.g. cameras) or other AGVs. Then we will be able to work on a platform but also to extend the work using the co-simulation framework.
9 Dissemination
Participants: Jean-Marie Bonnin, Christophe Couturier, Paul Couderc, Frédéric Weis.
9.1 Promoting scientific activities
9.1.1 Scientific events: selection
Member of the conference program committees
- PC member of eHPWAS 2021, F. Weis
9.1.2 Invited talks
- "Interoperability of cyber-security: The example of X2RAIL in the railway domain", April 2021, Rennes Métropole, C. Couturier
9.1.3 Scientific expertise
- Member of the scientific council of the Id4Car cluster, J.-M. Bonnin
- Scientific advisor of the YoGoKo startup, J.-M. Bonnin
- Scientific Board of "the pole Digital Society of the MSHB" (Maison des Sciences de l’Homme de Bretagne), J.-M. Bonnin
- Project evaluation for ANR, Belgium, Id4Car, Région Pays de la Loire, Région Nouvelle Aquitaine, J.-M. Bonnin
- Expert for CSV board of "Pôle Images et Réseaux", projects reviewing and selection, strategic roadmap definition, P. Couderc
9.2 Teaching - Supervision - Juries
9.2.1 Teaching
- L2/L3: network computing (lectures, tutorials, labs), 250 hours, F. Weis, Univ. Rennes 1
- Master 2: Wireless LANs, F. Weis, 30 hours, M2, IMT Atlantique
- Master 2: Pervasive computing and IoT system architectures, 4 hours, P. Couderc, Univ. Rennes 1
- Master 1: Network programming (lectures, tutorial, labs), 78 hours, Y. Maurel, Univ. Rennes 1
- L3/M2: network communications protocol for building automation (lectures, labs), 80 hours, Y. Maurel
- Master 2: Software engineering (lectures, tutorial, labs), 82 hours, Y. Maurel
- Master 2 : Mobility management in the Internet, JM. Bonnin, IMT Atlantique
- Master 2 Smart Mobility : Communications for ITS, JM. Bonnin, IMT Atlantique
- Master 2 IoT: Smart City, JM. Bonnin, ENSI Tunis
- Continuous training: Communications for Autonomous and Cooperative vehicle, Communications for ITS, JM. Bonnin, IMT Atlantique
- Master 1: Network programming (lab and project), 72 hours, C. Couturier, IMT Atlantique
- Master 1: IP networks (lectures, tutorial), 24 hours, C. Couturier, IMT Atlantique
- Master 2: Enterprise Network Design, 12 hours, C. Couturier, IMT Atlantique
- Master 2: Bid to Call for Tender, 12 hours, C. Couturier, IMT Atlantique
- Master 2: Supervision of the Networking and Telecom curriculum of FIP3A, C. Couturier, IMT Atlantique
- Master 2: Tools for cloud computing , 18 hours, C. Couturier, IMT Atlantique
9.2.2 Supervision
- PhD : Indra Ngurah, Car-based Data Collection for Low Energy Devices (Car-based DC4LED), defense in December 2021, Jean-Marie Bonnin
- PhD in progress: Juliette Grosset, Interactions between Automatic Guided Vehicles, September 2021, Jean-Marie Bonnin and Christophe Couturier
9.2.3 Juries
- HdR jury: Adnane Cabani, “Contributions aux Systèmes de Transport Intelligents et à la Logistique”, 3/03/2021
- PhD Jury: Ahmed Didouh, “Blockchain and revocation process Towards more secure vehicular communications”, 9/12/2021
9.2.4 Articles and contents
- "La revue des ITS et des nouvelles mobilités”, Nouveaux métiers, nouveaux enjeux: Quelles compétences pour les ITS coopératifs?, Jean-Marie Bonnin, April 2021
10 Scientific production
10.1 Major publications
- 1 inproceedingsEraRFID: Reliable RFID systems using erasure coding. .IEEE International Conference on RFID 2015San Diego, United StatesIEEEApril 2015
- 2 inproceedingsLocation corroboration using passive observations of IEEE 802.11 Access Points.CCNC 2019 - 16th IEEE Consumer Communications & Networking ConferenceLas Vegas, United StatesIEEEJanuary 2019, 1-7
- 3 incollectionOpportunistic Networking for ITS.ITS 2016 : Intelligent Transport Systems: Past, Present and Future DirectionsNova publisher2017, 59 - 86
10.2 Publications of the year
International peer-reviewed conferences
Doctoral dissertations and habilitation theses
Reports & preprints
10.3 Other
Scientific popularization