
Keywords
Computer Science and Digital Science
- A6.1.1. Continuous Modeling (PDE, ODE)
- A6.1.4. Multiscale modeling
- A6.4.1. Deterministic control
- A6.4.3. Observability and Controlability
- A6.4.4. Stability and Stabilization
- A6.4.5. Control of distributed parameter systems
- A6.4.6. Optimal control
- A6.5.1. Solid mechanics
- A6.5.4. Waves
Other Research Topics and Application Domains
- B3.3.1. Earth and subsoil
- B5.2.1. Road vehicles
- B5.2.3. Aviation
- B5.2.4. Aerospace
- B5.4. Microelectronics
- B5.6. Robotic systems
- B7.1.2. Road traffic
- B9.5.2. Mathematics
- B9.5.5. Mechanics
- B9.11.1. Environmental risks
1 Team members, visitors, external collaborators
Research Scientists
- Vincent Acary [Team leader, Inria, Senior Researcher, HDR]
- Franck Bourrier [Institut national de recherche pour l'agriculture, l'alimentation et l'environnement, Researcher, HDR]
- Bernard Brogliato [Inria, Senior Researcher, HDR]
- Felix Miranda Villatoro [Inria, Starting Faculty Position]
- Mohammad Rasool Mojallizadeh [Inria, Starting Research Position, from Jul 2021]
- Arnaud Tonnelier [Inria, Researcher, HDR]
Faculty Members
- Paul Armand [Univ de Limoges, Professor, until Aug 2021, HDR]
- Guillaume James [Institut polytechnique de Grenoble, Professor, HDR]
Post-Doctoral Fellows
- Abhishek Chatterjee [Inria]
- Nicholas Anton Collins-Craft [Inria]
- Mohammad Rasool Mojallizadeh [Inria, until Jun 2021]
PhD Students
- Charlelie Bertrand [Ecole de l'aménagement durable des territoires]
- Hoang Minh Nguyen [Inria, from Oct 2021]
- Rami Sayoud [Schneider Electric, until Aug 2021]
- Benoit Viano [Inria]
- Aya Younes [Univ Grenoble Alpes, from Oct 2021]
Technical Staff
- Franck Perignon [CNRS, Engineer]
Interns and Apprentices
- Marc Hetier [Inria, from May 2021 until Jul 2021]
- Camille Julliard [Inria, from May 2021 until Jul 2021]
- Huu Duc Anh Nguyen [Inria, from Mar 2021 until Aug 2021]
- Hoang Minh Nguyen [Inria, from Feb 2021 until Jul 2021]
- Aya Younes [Inria, from Feb 2021 until Jul 2021]
Administrative Assistant
- Diane Courtiol [Inria]
Visiting Scientist
- Christophe Prieur [CNRS, Senior Researcher, Gipsa-Lab, HDR]
2 Overall objectives
2.1 Introduction
The joint research team, TRIPOP, between INRIA Grenoble Rhône–Alpes, Grenoble INP and CNRS, part of the Laboratoire Jean Kuntzmann (LJK UMR 5224) is a follow up of the BIPOP team (2003–2017). The team is mainly concerned by the modeling, the mathematical analysis, the simulation and the control of nonsmooth dynamical systems. Nonsmooth dynamics concerns the study of the time evolution of systems that are not smooth in the mathematical sense, i.e., systems that are characterized by a lack of differentiability, either of the mappings in their formulations, or of their solutions with respect to time. In mechanics, the main instances of nonsmooth dynamical systems are multibody systems with Signorini unilateral contact, set-valued (Coulomb-like) friction and impacts. In Electronics, examples are found in switched electrical circuits with ideal components (diodes, switches, transistors). In Control, nonsmooth systems arise in the sliding mode control theory and in optimal control. A lot of examples can also be found in cyber-physical systems (hybrid systems), in transportation sciences, in mathematical biology or in finance.
2.2 General scope and motivations
Nonsmooth dynamics concerns the study of the time evolution of systems that are not smooth in the mathematical sense, i.e., systems that are characterized by a lack of differentiability, either of the mappings in their formulations, or of their solutions with respect to time. The class of nonsmooth dynamical systems recovers a large variety of dynamical systems that arise in many applications. The term “nonsmooth”, as the term “nonlinear”, does not precisely define the scope of the systems we are interested in but, and most importantly, they are characterized by the mathematical and numerical properties that they share. To give more insight of what are nonsmooth dynamical systems, we give in the sequel a very brief introduction of their salient features. For more details, we refer to 1, 268, 89, 46, 71, 41.
2.3 A flavor of nonsmooth dynamical systems
As a first illustration, let us consider a linear finite-dimensional system described by its state over a time-interval :
subjected to a set of inequality (unilateral) constraints:
If the constraints are physical constraints, a standard modeling approach is to augment the dynamics in (1) by an input vector that plays the role of a Lagrange multiplier vector. The multiplier restricts the trajectory of the system in order to respect the constraints. Furthermore, as in the continuous optimization theory, the multiplier must be signed and must vanish if the constraint is not active. This is usually formulated as a complementarity condition:
which models the one-sided effect of the inequality constraints. The notation holds component–wise and means . All together we end up with a Linear Complementarity System (LCS) of the form,
where is the matrix that models the input generated by the constraints. In a more general way, the constraints may also involve the Lagrange multiplier,
leading to a general definition of LCS as
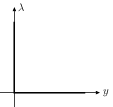
Complementarity condition 0≤y⊥λ≥00 \le y \perp \lambda \ge 0 .
The complementarity condition, illustrated in Figure 1 is the archetype of a nonsmooth graph that we extensively use in nonsmooth dynamics. The mapping is a multi-valued (set-valued) mapping, that is nonsmooth at the origin. It has a lot of interesting mathematical properties and reformulations that come mainly from convex analysis and variational inequality theory. Let us introduce the indicator function of as
This function is convex, proper and can be sub-differentiated 75. The definition of the subdifferential of a convex function is defined as:
A basic result of convex analysis reads as
that gives a first functional meaning to the set-valued mapping . Another interpretation of is based on the normal cone to a closed and nonempty convex set :
It is easy to check that and it follows that
Finally, the definition of the normal cone yields a variational inequality:
The relations (11) and (12) allow one to formulate the complementarity system with as a differential inclusion based on a normal cone (see (15)) or as a differential variational inequality. By extending the definition to other types of convex functions, possibly nonsmooth, and using more general variational inequalities, the same framework applies to the nonsmooth laws depicted in Figure 2 that includes the case of piecewise smooth systems.
The mathematical concept of solutions depends strongly on the nature of the matrix quadruplet in (6). If is a positive definite matrix (or a -matrix), the Linear Complementarity problem
admits a unique solution which is a Lipschitz continuous mapping. It follows that the Ordinary Differential Equation (ODE)
is a standard ODE with a Lipschitz right-hand side with a solution for the initial value problem. If , the system can be written as a differential inclusion in a normal cone as
that admits a solution that is absolutely continuous if is a definite positive matrix and the initial condition satisfies the constraints. The time derivative and the multiplier may have jumps and are generally considered as functions of bounded variations. If , the order of nonsmoothness increases and the Lagrange multiplier may contain Dirac atoms and must be considered as a measure. Higher–order index, or higher relative degree systems yield solutions in terms of distributions and derivatives of distributions 32.
A lot of variants can be derived from the basic form of linear complementarity systems, by changing the form of the dynamics including nonlinear terms or by changing the complementarity relation by other multivalued maps. In particular the nonnegative orthant may be replaced by any convex closed cone leading to complementarity over cones
where its dual cone given by
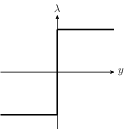
In Figure 2, we illustrate some other basic maps that can used for defining the relation between and . The saturation map, depicted in Figure 2(a) is a single valued continuous function which is an archetype of piece-wise smooth map. In Figure 2(b), the relay multi-function is illustrated. If the upper and the lower limits of are respectively equal to 1 and , we obtain the multivalued sign function defined as
Using again convex analysis, the multivalued sign function may be formulated as an inclusion into a normal cone as
More generally, any system of the type,
can reformulated in terms of the following set-valued system
The system (21) appears in a lot of applications; among them, we can cite the sliding mode control, electrical circuits with relay and Zener diodes 27, or mechanical systems with friction 34.
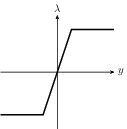
Examples of multivalued piecewise linear models: Saturation
Examples of multivalued piecewise linear models: Relay
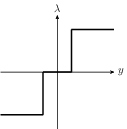
Examples of multivalued piecewise linear models: Relay with dead zone Examples of multivalued piecewise linear models
Though this class of systems seems to be rather specific, it includes as well more general dynamical systems such as piecewise smooth systems and discontinuous ordinary differential equations. Indeed, the system (20) for scalars and can be viewed as a discontinuous differential equation:
One of the most well-known mathematical framework to deal with such systems is the Filippov theory 68 that embed the discontinuous differential equations into a differential inclusion. In the case of a single discontinuity surface given in our example by , the Filippov differential inclusion based on the convex hull of the vector fields in the neighborhood of is equivalent to the use of the multivalued sign function in (20). Conversely, as it has been shown in 40, a piecewise smooth system can be formulated as a nonsmooth system based on products of multivalued sign functions.
2.4 Nonsmooth Dynamical systems in the large
Generally, the nonsmooth dynamical systems we propose to study mainly concern systems that possess the following features:
- A nonsmooth formulation of the constitutive/behavioral laws that define the system. Examples of nonsmooth formulations are piecewise smooth functions, multi–valued functions, inequality constraints, yielding various definitions of dynamical systems such as piecewise smooth systems, discontinuous ordinary differential equations, complementarity systems, projected dynamical systems, evolution or differential variational inequalities and differential inclusions (into normal cones). Fundamental mathematical tools come from convex analysis 102, 74, 75, complementarity theory 62, and variational inequalities theory 66.
- A concept of solutions that does not require continuously differentiable functions of time. For instance, absolutely continuous, Lipschitz continuous functions or functions of local bounded variation are the basis for solution concepts. Measures or distributions are also solutions of interest for differential inclusions or evolution variational inequalities.
2.5 Nonsmooth systems versus hybrid systems
The nonsmooth dynamical systems we are dealing with, have a nonempty intersection with hybrid systems and cyber-physical systems, as it is briefly discussed in Sect. 3.2.4. Like in hybrid systems, nonsmooth dynamical systems define continuous–time dynamics that can be identified to modes separated by guards, defined by the constraints. However, the strong mathematical structure of nonsmooth dynamical systems allows us to state results on the following points:
- Mathematical concept of solutions: well-posedness (existence, and possibly, uniqueness properties, (dis)continuous dependence on initial conditions).
- Dynamical systems theoretic properties: existence of invariants (equilibria, limit cycles, periodic solutions,...) and their stability, existence of oscillations, periodic and quasi-periodic solutions and propagation of waves.
- Control theoretic properties: passivity, controllability, observability, stabilization, robustness.
These latter properties, that are common for smooth nonlinear dynamical systems, distinguish the nonsmooth dynamical systems from the very general definition of hybrid or cyber-physical systems 43, 73. Indeed, it is difficult to give a precise mathematical concept of solutions for hybrid systems since the general definition of hybrid automata is usually too loose.
2.6 Numerical methods for nonsmooth dynamical systems
To conclude this brief exposition of nonsmooth dynamical systems, let us recall an important fact related to numerical methods. Beyond their intrinsic mathematical interest, and the fact that they model real physical systems, using nonsmooth dynamical systems as a model is interesting, because it exists a large set of robust and efficient numerical techniques to simulate them. Without entering into deeper details, let us give two examples of these techniques:
- Numerical time integration methods: convergence, efficiency (order of consistency, stability, symplectic properties). For the nonsmooth dynamical systems described above, there exist event–capturing time–stepping schemes with strong mathematical results. These schemes have the ability to numerically integrate the initial value problem without performing an event location, but by capturing the event within a time step. We call an event, or a transition, every change into the index set of the active constraints in the complementarity formulation or in the normal cone inclusion. Hence these schemes are able to simulate systems with a huge number of transitions or even worth finite accumulation of events (Zeno behavior). Furthermore, the schemes are not suffering from the weaknesses of the standard schemes based on a regularization (smoothing) of the multi-valued mapping resulting in stiff ordinary differential equations. For the time–integration of the initial value problem (IVP), or Cauchy problem, a lot of improvements of the standard time–stepping schemes for nonsmooth dynamics (Moreau–Jean time-stepping scheme) have been proposed in the last decade, in terms of accuracy and dissipation properties 37, 39, 103, 104, 36, 61, 57, 106, 59. An important part of these schemes has been developed by members of the BIPOP team and has been implemented in the Siconos software (see Sect. 5).
- Numerical solution procedure for the time–discretized problem, mainly through well-identified problems studied in the optimization and mathematical programming community. Another very interesting feature is the fact that the discretized problem that we have to solve at each time–step is generally a well-known problem in optimization. For instance, for LCSs, we have to solve a linear complementarity problem 62 for which there exist efficient solvers in the literature. Comparing to the brute force algorithm with exponential complexity that consists in enumerating all the possible modes, the algorithms for linear complementarity problem have polynomial complexity when the problem is monotone.
In the Axis 2 of the research program (see Sect. 3.3), we propose to perform new research on the geometric time-integration schemes of nonsmooth dynamical systems, to develop new integration schemes for Boundary Value Problem (BVP), and to work on specific methods for two time-discretized problems: the Mathematical Program with Equilibrium Constraints (MPEC) for optimal control and Second Order Cone Complementarity Problems (SOCCP) for discrete frictional contact systems.
3 Research program
3.1 Introduction
In this section, we develop our scientific program. In the framework of nonsmooth dynamical systems, the activities of the project–team will be on focused on the following research axes:
- Axis 1: Modeling and analysis (detailed in Sect. 3.2).
- Axis 2: Numerical methods and simulation (detailed in Sect. 3.3).
- Axis 3: Automatic Control (detailed in Sect. 3.4)
These research axes will be developed with a strong emphasis on the software development and the industrial transfer.
3.2 Axis 1: Modeling and analysis
This axis is dedicated to the modeling and the mathematical analysis of nonsmooth dynamical systems. It consists of four main directions. Two directions are in the continuation of BIPOP activities: 1) multibody vibro-impact systems (Sect. 3.2.1) and 2) excitable systems (Sect. 3.2.2). Two directions are completely new with respect to BIPOP: 3) Nonsmooth geomechanics and natural hazards assessment (Sect. 3.2.3) and 4) Cyber-physical systems (hybrid systems) (Sect. 3.2.4).
3.2.1 Multibody vibro-impact systems
Participants: B. Brogliato, F. Bourrier, G. James, V. Acary
- Multiple impacts with or without friction : there are many different approaches to model collisions, especially simultaneous impacts (so-called multiple impacts) 96. One of our objectives is on one hand to determine the range of application of the models (for instance, when can one use “simplified” rigid contact models relying on kinematic, kinetic or energetic coefficients of restitution?) on typical benchmark examples (chains of aligned beads, rocking block systems). On the other hand, try to take advantage of the new results on nonlinear waves phenomena, to better understand multiple impacts in 2D and 3D granular systems. The study of multiple impacts with (unilateral) nonlinear visco-elastic models (Simon-Hunt-Crossley, Kuwabara-Kono), or visco-elasto-plastic models (assemblies of springs, dashpots and dry friction elements), is also a topic of interest, since these models are widely used.
- Artificial or manufactured or ordered granular crystals, meta-materials : Granular metamaterials (or more general nonlinear mechanical metamaterials) offer many perspectives for the passive control of waves originating from impacts or vibrations. The analysis of waves in such systems is delicate due to spatial discreteness, nonlinearity and non-smoothness of contact laws 100, 82, 81, 90. We will use a variety of approaches, both theoretical (e.g. bifurcation theory, modulation equations) and numerical, in order to describe nonlinear waves in such systems, with special emphasis on energy localization phenomena (excitation of solitary waves, fronts, breathers).
- Systems with clearances, modeling of friction : joint clearances in kinematic chains deserve specific analysis, especially concerning friction modeling 42. Indeed contacts in joints are often conformal, which involve large contact surfaces between bodies. Lubrication models should also be investigated.
- Painlevé paradoxes : the goal is to extend the results in 70, which deal with single-contact systems, to multi-contact systems. One central difficulty here is the understanding and the analysis of singularities that may occur in sliding regimes of motion.
As a continuation of the work in the BIPOP team, our software code, Siconos (see Sect. 5) will be our favorite software platform for the integration of these new modeling results.
3.2.2 Excitable systems
Participants: A. Tonnelier, G. James
An excitable system elicits a strong response when the applied perturbation is greater than a threshold 93, 94, 48, 107. This property has been clearly identified in numerous natural and physical systems. In mechanical systems, non-monotonic friction law (of spinodal-type) leads to excitability. Similar behavior may be found in electrical systems such as active compounds of neuristor type. Models of excitable systems incorporate strong non-linearities that can be captured by non-smooth dynamical systems. Two properties are deeply associated with excitable systems: oscillations and propagation of nonlinear waves (autowaves in coupled excitable systems). We aim at understanding these two dynamical states in excitable systems through theoretical analysis and numerical simulations. Specifically we plan to study:
- Threshold-like models in biology: spiking neurons, gene networks.
- Frictional contact oscillators (slider block, Burridge-Knopoff model).
- Dynamics of active electrical devices : memristors, neuristors.
3.2.3 Nonsmooth geomechanics and natural hazards assessment
Participants: F. Bourrier, B. Brogliato, G. James, V. Acary
- Rockfall impact modeling : Trajectory analysis of falling rocks during rockfall events is limited by a rough modeling of the impact phase 50, 49, 88. The goal of this work is to better understand the link between local impact laws at contact with refined geometries and the efficient impact laws written for a point mass with a full reset map. A continuum of models in terms of accuracy and complexity will be also developed for the trajectory studies. In particular, nonsmooth models of rolling friction, or rolling resistance will be developed and formulated using optimization problems.
- Experimental validation : The participation of INRAe with F. Bourrier makes possible the experimental validation of models and simulations through comparisons with real data. INRAe has a large experience of lab and in-situ experiments for rockfall trajectories modeling 50, 49. It is a unique opportunity to vstrengthen our model and to prove that nonsmooth modeling of impacts is reliable for such experiments and forecast of natural hazards.
- Rock fracturing : When a rock falls from a steep cliff, it stores a large amount of kinetic energy that is partly dissipated though the impact with the ground. If the ground is composed of rocks and the kinetic energy is sufficiently high, the probability of the fracture of the rock is high and yields an extra amount of dissipated energy but also an increase of the number of blocks that fall. In this item, we want to use the capability of the nonsmooth dynamical framework for modeling cohesion and fracture 85, 38 to propose new impact models.
- Rock/forest interaction : To prevent damages and incidents to infrastructures, a smart use of the forest is one of the ways to control trajectories (decrease of the run-out distance, jump heights and the energy) of the rocks that fall under gravity 63, 65. From the modeling point of view and to be able to improve the protective function of the forest, an accurate modeling of impacts between rocks and trees is required. Due to the aspect ratio of the trees, they must be considered as flexible bodies that may be damaged by the impact. This new aspect offers interesting modeling research perspectives.
More generally, our collaboration with INRAe opens new long term perspectives on granular flows applications such as debris and mud flows, granular avalanches and the design of structural protections. The numerical methods that go with these new modeling approaches will be implemented in our software code, Siconos (see Sect.5)
3.2.4 Cyber-physical systems (hybrid systems)
Participants: V. Acary, B. Brogliato, C. Prieur, A. Tonnelier
Nonsmooth systems have a non-empty intersection with hybrid systems and cyber–physical systems. However, nonsmooth systems enjoy strong mathematical properties (concept of solutions, existence and uniqueness) and efficient numerical tools. This is often the result of the fact that nonsmooth dynamical systems are models of physical systems, and then, take advantage of their intrinsic property (conservation or dissipation of energy, passivity, stability). A standard example is a circuit with ideal diodes. From the hybrid point of view, this circuit is a piecewise smooth dynamical system with modes, that can be quite cumbersome to enumerate in order to determinate the current mode. As a nonsmooth system, this circuit can be formulated as a complementarity system for which there exist efficient time–stepping schemes and polynomial time algorithms for the computation of the current mode. The key idea of this research action is to take benefit of this observation to improve the hybrid system modeling tools.
Research actions: There are two main actions in this research direction that will be implemented in the framework of the Inria Project Lab (IPL “ Modeliscale”, see modeliscale website for partners and details of the research program):
Structural analysis of multimode DAE : When a hybrid system is described by a Differential Algebraic Equation (DAE) with different differential indices in each continuous mode, the structural analysis has to be completely rethought. In particular, the re-initialization rule, when a switching occurs from a mode to another one, has to be consistently designed. We propose in this action to use our knowledge in complementarity and (distribution) differential inclusions 32 to design consistent re-initialization rule for systems with nonuniform relative degree vector and .
Cyber–physical in hybrid systems modeling languages : Nowadays, some hybrid modeling languages and tools are widely used to describe and to simulate hybrid systems (modelica, simulink, and see 60 for references therein). Nevertheless, the compilers and the simulation engines behind these languages and tools suffer from several serious weaknesses (failure, weird output or huge sensitivity to simulation parameters), especially when some components, that are standard in nonsmooth dynamics, are introduced (piecewise smooth characteristic, unilateral constraints and complementarity condition, relay characteristic, saturation, dead zone, ...). One of the main reasons is the fact that most of the compilers reduce the hybrid system to a set of smooth modes modeled by differential algebraic equations and some guards and reinitialization rules between these modes. Sliding mode and Zeno–behaviour are really harsh for hybrid systems and relatively simple for nonsmooth systems. With B. Caillaud (Inria HYCOMES) and M. Pouzet (Inria PARKAS), we propose to improve this situation by implementing a module able to identify/describe nonsmooth elements and to efficiently handle them with siconos as the simulation engine. They have already carried out a first implementation 58 in Zelus, a synchronous language for hybrid system. Removing the weaknesses related to the nonsmoothness of solutions should improve hybrid systems towards robustness and certification.
A general solver for piecewise smooth systems This direction is the continuation of the promising result on modeling and the simulation of piecewise smooth systems 40. As for general hybrid automata, the notion or concept of solutions is not rigorously defined from the mathematical point of view. For piecewise smooth systems, multiplicity of solutions can happen and sliding solutions are common. The objective is to recast general piecewise smooth systems in the framework of differential inclusions with Aizerman–Pyatnitskii extension 40, 68. This operation provides a precise meaning to the concept of solutions. Starting from this point, the goal is to design and study an efficient numerical solver (time–integration scheme and optimization solver) based on an equivalent formulation as mixed complementarity systems of differential variational inequalities. We are currently discussing the issues in the mathematical analysis. The goal is to prove the convergence of the time–stepping scheme to get an existence theorem. With this work, we should also be able to discuss the general Lyapunov stability of stationary points of piecewise smooth systems.
3.3 Axis 2: Numerical methods and simulation
This axis is dedicated to the numerical methods and simulation for nonsmooth dynamical systems. As we mentioned in the introduction, the standard numerical methods have been largely improved in terms of accuracy and dissipation properties in the last decade. Nevertheless, the question of the geometric time–integration techniques remains largely open. It constitutes the objective of the first research direction in Sect. 3.3.1. Beside the standard IVP, the question of normal mode analysis for nonsmooth systems is also a research topic that emerged in the recent years. More generally, the goal of the second research direction (Sect. 3.3.2) is to develop numerical methods to solve boundary value problems in the nonsmooth framework. This will serve as a basis for the computation of the stability and numerical continuation of invariants. Finally, once the time-integration method is chosen, it remains to solve the one-step nonsmooth problem, which is, most of time, a numerical optimization problem. In Sect. 3.3.3, we propose to study two specific problems with a lot of applications: the Mathematical Program with Equilibrium Constraints (MPEC) for optimal control, and Second Order Cone Complementarity Problems (SOCCP) for discrete frictional contact systems. After some possible prototypes in scripting languages (Python and Matlab), we will be attentive that all these developments of numerical methods will be integrated in Siconos.
3.3.1 Geometric time–integration schemes for nonsmooth Initial Value Problem (IVP)
Participants: V. Acary, B. Brogliato, G. James, F. Pérignon
The objective of this research item is to continue to improve classical time–stepping schemes for nonsmooth systems to ensure some qualitative properties in discrete-time. In particular, the following points will be developed
- Conservative and dissipative systems. The question of the energy conservation and the preservation of dissipativity properties in the Willems sense 72 will be pursued and extended to new kinds of systems (nonlinear mechanical systems with nonlinear potential energy, systems with limited differentiability (rigid impacts vs. compliant models)).
- Lie–group integration schemes for finite rotations for the multi-body systems extending recent progresses in that directions for smooth systems 44.
- Conservation and preservation of the dispersion properties of the (non)-dispersive system.
3.3.2 Stability and numerical continuation of invariants
Participants: G. James, V. Acary, A. Tonnelier, F. Pérignon,
By invariants, we mean equilibria, periodic solutions, limit cycles or waves. Our preliminary work on this subject raised the following research perspectives:
-
Computation of periodic solutions of discrete mechanical systems . The modal analysis, i.e., a spectral decomposition of the problem into linear normal modes is one of the basic tools for mechanical engineers to study dynamic response and resonance phenomena of an elastic structure. Since several years, the concept of nonlinear normal modes 86, that is closely related to the computation of quasi-periodic solutions that live in a nonlinear manifold, has emerged as the nonlinear extension of the modal analysis. One of the fundamental question is: what remains valid if we add unilateral contact conditions ? The computation of nonsmooth modes amounts to computing periodic solutions, performing the parametric continuation of solution branches and studying the stability of these branches.
This calls for time integration schemes for IVP an BVP that satisfy some geometric criteria: conservation of energy, reduced numerical dispersion, symplecticity as we described before. Though the question of conservation of energy for unilateral contact has been discussed in 36, the other questions remain open. For the shooting technique and the study of stability, we need to compute the Jacobian matrix of the flow with respect to initial conditions, the so-called saltation matrix 87, 97 for nonsmooth flows. The eigenvalues of this matrix are the Floquet multipliers that give some information on the stability of the periodic solutions. The question of an efficient computation of this matrix is also an open question. For the continuation, the question is also largely open since the continuity of the solutions with respect to the parameters is not ensured.
- Extension to elastic continuum media . This is a difficult task. First of all, the question of the mathematical model for the dynamic continuum problem with unilateral contact raises some problems of well–posedness. For instance, the need for an impact law is not clear in some cases. If we perform a semi–discretization in space with classical techniques (Finite Element Methods, Finite Difference Schemes), we obtain a discrete system for which the impact law is needed. Besides all the difficulties that we enumerate for discrete systems in the previous paragraph, the space discretization also induces numerical dispersion that may destroy the periodic solutions or renders their computation difficult. The main targeted applications for this research are cable–systems, string musical instruments, and seismic response of electrical circuit breakers with Schneider Electric.
- Computation of solutions of nonsmooth time Boundary Value Problems (BVP) (collocation, shooting) . The technique developed in the two previous items can serve as a basis for the development of more general solvers for nonsmooth BVP that can be for instance found when we solve optimal control problems by direct or indirect methods, or the computation of nonlinear waves. Two directions can be envisaged:
- Shooting and multiple shooting techniques. In such methods, we reformulate the BVP into a sequence of IVPs that are iterated through a Newton based technique. This implies the computation of Jacobians for nonsmooth flows, the question of the continuity w.r.t to initial condition and the use of semi-smooth Newton methods.
- Finite differences and collocations techniques. In such methods, the discretization will result into a large sparse optimization problems to solve. The open questions are as follows: a) the study of convergence, b) how to locally improve the order if the solution is locally smooth, and c) how to take benefit of spectral methods.
- Continuation techniques of solutions with respect to a parameter. Standard continuation technique requires smoothness. What types of methods can be extended in the nonsmooth case (arc-length technique, nonsmooth (semi-smooth) Newton, Asymptotical Numerical Methods (ANM))
3.3.3 Numerical optimization for discrete nonsmooth problems
Participants: V. Acary, M. Brémond, F. Pérignon, B. Brogliato, C. Prieur
- Mathematical Program with Equilibrium Constraints (MPEC) for optimal control . The discrete problem that arises in nonsmooth optimal control is generally a MPEC 108. This problem is intrinsically nonconvex and potentially nonsmooth. Its study from a theoretical point of view has started 10 years ago but there is no consensus for its numerical solving. The goal is to work with world experts of this problem (in particular M. Ferris from Wisconsin University) to develop dedicated algorithms for solving MPEC, and provide to the optimization community challenging problems.
- Second Order Cone Complementarity Problems (SOCCP) for discrete frictional systems : After some extensive comparisons of existing solvers on a large collection of examples 31, 28, the numerical treatment of constraints redundancy by the proximal point technique and the augmented Lagrangian formulation seems to be a promising path for designing new methods. From the comparison results, it appears that the redundancy of constraints prevents the use of second order methods such as semi–smooth Newton methods or interior point methods. With P. Armand (XLIM, U. de Limoges), we propose to adapt recent advances for regularizing constraints for the quadratic problem 69 for the second-order cone complementarity problem. The other question is the improvement of the efficiency of the algorithms by using accelerated schemes for the proximal gradient method that come from large–scale machine learning and image processing problems. Learning from the experience in large–scale machine learning and image processing problems, the accelerated version of the classical gradient algorithm 95 and the proximal point algorithm 45, and many of their further extensions, could be of interest for solving discrete frictional contact problems. Following the visit of Y. Kanno (University of Tokyo) and his preliminary experience on frictionless problems, we will extend its use to frictional contact problem. When we face large-scale problems, the main available solvers is based on a Gauss–Seidel strategy that is intrinsically sequential. Accelerated first-order methods could be a good alternative to take benefit of the distributed scientific computing architectures.
3.4 Axis 3: Automatic Control
Participants: B. Brogliato, C. Prieur, V. Acary, F. Miranda-Villatoro
This last axis is dedicated to the automatic control of nonsmooth dynamical systems, or the nonsmooth control of smooth systems. The first item concerns the discrete-time sliding mode control for which significant results on the implicit implementation have been obtained in the BIPOP team. The idea is to pursue this research towards state observers and differentiators (Sect 3.4.1). The second direction concerns the optimal control which brings of nonsmoothness in their solution and their formulation. After the preliminary work in BIPOP on the quadratic optimal control of Linear Complementarity systems(LCS), we propose to go further to the minimal time problem, to impacting systems and optimal control with state constraints (Sect. 3.4.2). In Sect 3.4.3, the objective is to study the control of nonsmooth systems that contain unilateral constraint, impact and friction. The targeted systems are cable–driven systems, multi-body systems with clearances and granular materials. In Sect 3.4.4, we will continue our work on the higher order Moreau sweeping process. Up to now, the work of BIPOP was restricted to finite-dimensional systems. In Sect 3.4.5, we propose to extend our approach to the control of elastic structures subjected to contact unilateral constraints.
It is noteworthy that most of the problems listed below, will make strong use of the numerical tools analyzed in Axis 2, and of the Modeling analysis of Axis 1. For instance all optimal control problems yield BVPs. Control of granular materials will undoubtedly use models and numerical simulation developed in Axis 1 and 2. And so on. It has to be stressed that the type of nonsmooth models we are working with, deserve specific numerical algorithms which cannot be found in commercial software packages. One of the goals is to continue to extend our software package Siconos, and in particular the siconos/control toolbox with these developments.
3.4.1 Discrete-time Sliding-Mode Control (SMC) and State Observers (SMSO)
- SMSO, exact differentiators: we have introduced and obtained significant results on the implicit discretization of various classes of sliding-mode controllers 33, 35, 77, 91, 53, with successful experimental validations 78, 77, 79, 111. Our objective is to prove that the implicit discretization can also bring advantages for sliding-mode state observers and Levant's exact differentiators, compared with the usual explicit digital implementation that generates chattering. In particular the implicit discretization guarantees Lyapunov stability and finite-time convergence properties which are absent in explicit methods.
- High-Order SMC (HOSMC): this family of controllers has become quite popular in the sliding-mode scientific community since its introduction by Levant in the nineties. We want here to continue the study of implicit discretization of HOSMC (twisting, super-twisting algorithms) and especially we would like to investigate the comparisons between classical (first order) SMC and HOSMC, when both are implicitly discretized, in terms of performance, accuracy, chattering suppression. Another topic of interest is stabilization in finite-time of systems with impacts and unilateral constraints, in a discrete-time setting.
3.4.2 Optimal Control
- Linear Complementarity Systems (LCS) : With the PhD thesis of A. Vieira, we have started to study the quadratic optimal control of LCS. Our objective is to go further with minimum-time problems. Applications of LCS are mainly in electrical circuits with set-valued components such as ideal diodes, transistors, etc. Such problems naturally yield MPEC when numerical solvers are sought. It is therefore intimately linked with Axis 2 objectives.
- Impacting systems : the optimal control of mechanical systems with unilateral constraints and impacts, largely remains an open issue. The problem can be tackled from various approaches: vibro-impact systems (no persistent contact modes) that may be transformed into discrete-time mappings via the impact Poincaré map; or the classical integral action minimization (Bolza problem) subjected to the complementarity Lagrangian dynamics including impacts.
- State constraints, generalized control : this problem differs from the previous two, since it yields Pontryagin's first order necessary conditions that take the form of an LCS with higher relative degree between the complementarity variables. This is related to the numerical techniques for the higher order sweeping process 32.
3.4.3 Control of nonsmooth discrete Lagrangian systems
- Cable–driven systems: these systems are typically different from the cable-car systems, and are closer in their mechanical structure to so-called tensegrity structures. The objective is to actuate a system via cables supposed in a first instance to be flexible (slack mode) but non-extensible in their longitudinal direction. This gives rise to complementarity conditions, one big difference with usual complementarity Lagrangian systems being that the control actions operate directly in one of the complementary variables (and not in the smooth dynamics as in cable-car systems). Therefore both the cable models and the control properties are expected to differ a lot from what we may use for cableway systems (for which guaranteeing a positive cable tension is usually not an issue, hence avoiding slack modes, but the deformation of the cables due to the nacelles and cables weights, is an important factor). Tethered systems are a close topic.
- Multi-body systems with clearances: our approach is to use models of clearances with dynamical impact effects, i.e. within Lagrangian complementarity systems. Such systems are strongly underactuated due to mechanical play at the joints. However their structure, as underactuated systems, is quite different from what has been usually considered in the Robotics and Control literature. In the recent past we have proposed a thorough numerical robustness analysis of various feedback collocated and non-collocated controllers (PD, linearization, passivity-based). We propose here to investigate specific control strategies tailored to such underactuated systems 51.
- Granular systems: the context is the feedback control of granular materials. To fix the ideas, one may think of a “juggling” system whose “object” (uncontrolled) part consists of a chain of aligned beads. Once the modeling step has been fixed (choice of a suitable multiple impact law), one has to determine the output to be controlled: all the beads, some of the beads, the chain's center of mass (position, velocity, vibrational magnitude and frequency), etc. Then we aim at investigating which type of controller may be used (output or state feedback, “classical” or sinusoidal input with feedback through the magnitude and frequency) and especially which variables may be measured/observed (positions and/or velocities of all or some of the beads, position and/or velocity of the chain's center of gravity). This topic follows previous results we obtained on the control of juggling systems 54, with increasing complexity of the “object”'s dynamics. The next step would be to extend to 2D and then 3D granular materials. Applications concern vibrators, screening, transport in mining and manufacturing processes.
- Stability of structures: our objective here is to study the stability of stacked blocks in 2D or 3D, and the influence on the observed behavior (numerically and/or analytically) of the contact/impact model.
3.4.4 Switching LCS and DAEs, higher-order sweeping process (HOSwP)
- We have gained a strong experience in the field of complementarity systems and distribution differential inclusions 32, 56, that may be seen as some kind of switching DAEs. We plan to go further with non-autonomous HOSwP with switching feedback inputs and non-uniform vector relative degrees. Switching linear complementarity systems can also be studied, though the exact relationships between both point of views remain unclear at the present time. This axis of research is closely related to cyber-physical systems in section 3.2.
3.4.5 Control of Elastic (Visco-plastic) systems with contact, impact and friction
- Stabilization, trajectory tracking: until now we have focused on the stability and the feedback control of systems of rigid bodies. The proposal here is to study the stabilization of flexible systems (for instance, a “simple” beam) subjected to unilateral contacts with or without set-valued friction (contacts with obstacles, or impacts with external objects line particle/beam impacts). This gives rise to varying (in time and space) boundary conditions. The best choice of a good contact law is a hard topic discussed in the literature.
- Cableway systems (STRMTG, POMA): cable-car systems present challenging control problems because they usually are underactuated systems, with large flexibilities and deformations. Simplified models of cables should be used (Ritz-Galerkin approach), and two main classes of systems may be considered: those with moving cable and only actuator at the station, and those with fixed cable but actuated nacelles. It is expected that they possess quite different control properties and thus deserve separate studies. The nonsmoothness arises mainly from the passage of the nacelles on the pylons, which induces frictional effects and impacts. It may certainly be considered as a nonsmooth set-valued disturbance within the overall control problem.
4 Application domains
4.1 Domain 1
Nonsmooth dynamical systems arise in a lot of application fields. We briefly expose here some applications that have been treated in the BIPOP team and that we will continue in the TRIPOP team, as a validation for the research axes and also in terms of transfer. In mechanics, the main instances of nonsmooth dynamical systems are multibody systems with Signorini's unilateral contact, set-valued (Coulomb-like) friction and impacts, or in continuum mechanics, ideal plasticity, fracture or damage. Some illustrations are given in Figure 5(a-f). Other instances of nonsmooth dynamical systems can also be found in electrical circuits with ideal components (see Figure 5(g)) and in control theory, mainly with sliding mode control and variable structure systems (see Figure 5(h)). More generally, every time a piecewise, possibly set–valued, model of systems is invoked, we end up with a nonsmooth system. This is the case, for instance, for hybrid systems in nonlinear control or for piecewise linear modeling of gene regulatory networks in mathematical biology (see Figure 5(i)). Another common example of nonsmooth dynamics is also found when the vector field of a dynamical system is defined as a solution of an optimization problem under constraints, or a variational inequality. Examples of this kind are found in the optimal control theory, in dynamic Nash equilibrium or in the theory of dynamic flows over networks.

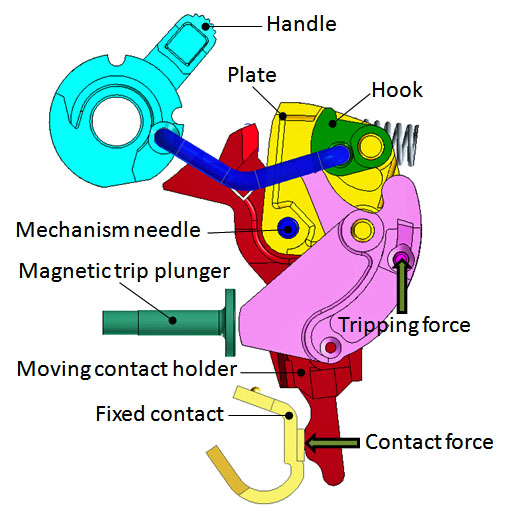


Application fields of nonsmooth dynamics (mechanics): Circuit breakers mechanisms
Application fields of nonsmooth dynamics (mechanics): Circuit breakers mechanisms
Application fields of nonsmooth dynamics (mechanics): Granular flows
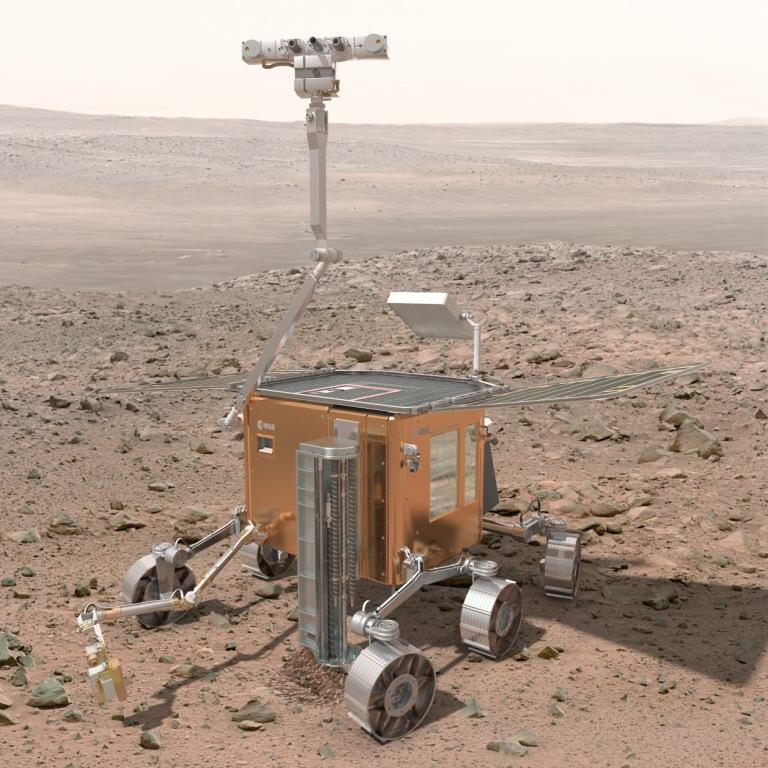
Application fields of nonsmooth dynamics (mechanics): Robots (ESA ExoMars Rover )
Application fields of nonsmooth dynamics (mechanics): Rockfall , , Application fields of nonsmooth dynamics (mechanics)

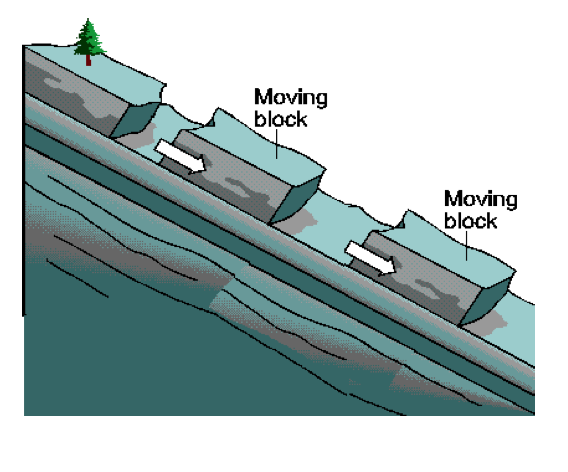
Application fields of nonsmooth dynamics (waves): Frictional interface and solitary waves in the Burridge-Knopoff model
Application fields of nonsmooth dynamics (waves): Sliding blocks
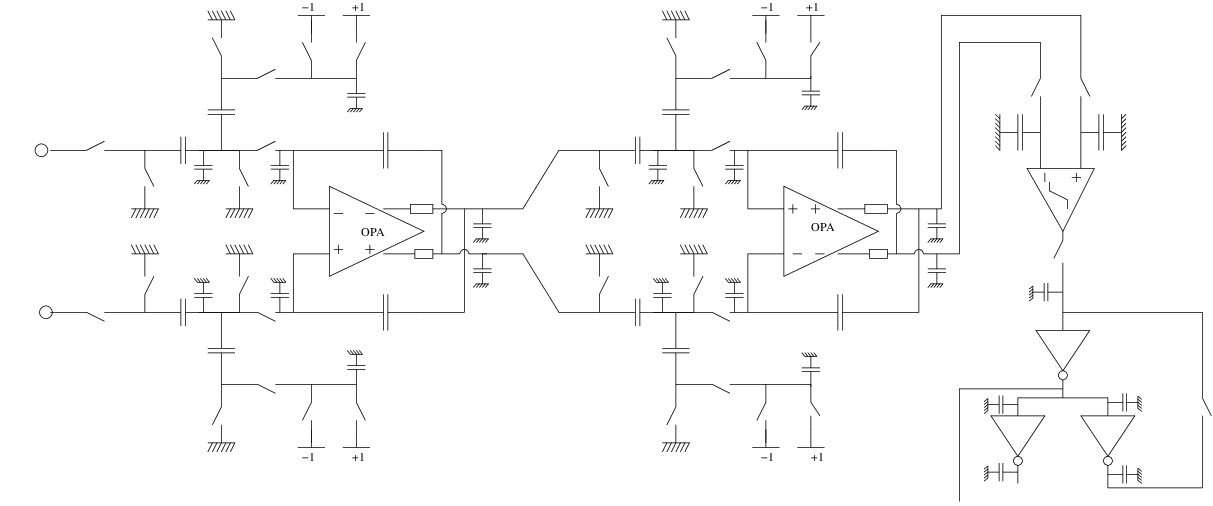
Application fields of nonsmooth dynamics: Switched electrical circuits (delta-sigma converter)
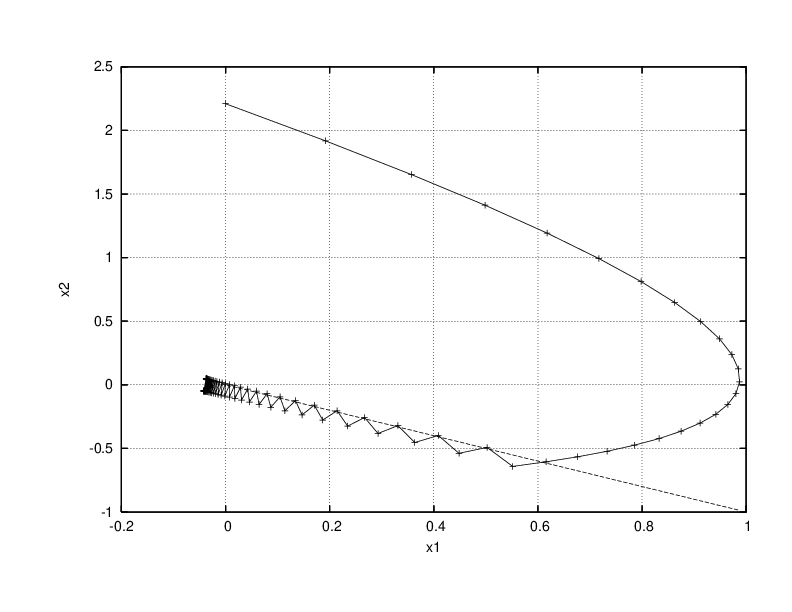
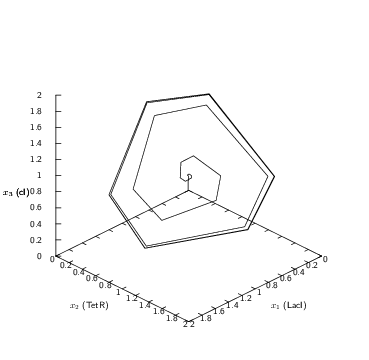
Application fields of nonsmooth dynamics: Sliding mode control , , , ,
Application fields of nonsmooth dynamics: Sliding mode control , , , ,
Application fields of nonsmooth dynamics: Sliding mode control , , , ,
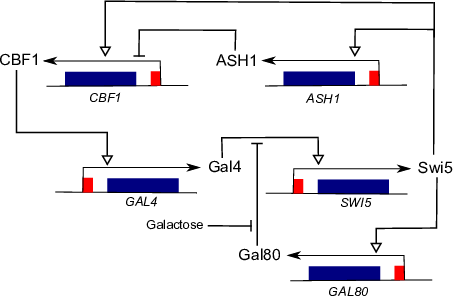
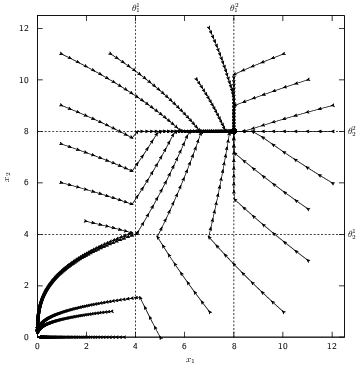
Application fields of nonsmooth dynamics: Gene regulatory networks
Application fields of nonsmooth dynamics: Gene regulatory networks
Application fields of nonsmooth dynamics: Gene regulatory networks
5 New software and platforms
5.1 New software
5.1.1 SICONOS
-
Name:
Modeling, simulation and control of nonsmooth dynamical systems
-
Keywords:
NSDS, MEMS, DCDC, SD, Collision, Friction, Mechanical multi-body systems
-
Scientific Description:
The aim of this work is to provide a common platform for the simulation, modeling, analysis and control of abstract nonsmooth dynamical systems. Besides usual quality attributes for scientific computing software, we want to provide a common framework for various scientific fields, to be able to rely on the existing developments (numerical algorithms, description and modeling software), to support exchanges and comparisons of methods, to disseminate the know-how to other fields of research and industry, and to take into account the diversity of users (end-users, algorithm developers, framework builders) in building expert interface in Python. After the requirements elicitation phase, the Siconos Software project has been divided into 5 work packages which are identified to software products:
• SICONOS/NUMERICS This library contains a set of numerical algorithms, already well identified, to solve non smooth dynamical systems. This library is written in low-level languages (C,F77) in order to ensure numerical efficiency and the use of standard libraries (Blas, Lapack, . . . )
• SICONOS/KERNEL This module is an object-oriented structure (C++) for the modeling and the simulation of abstract dynamical systems. It provides the users with a set of classes to describe their nonsmooth dynamical system (dynamical systems, interactions, nonsmooth laws, . . . ) and to perform a numerical time integration and solving.
• SICONOS/FRONT-END. This module is mainly an auto-generated wrapper in Python which provides a user-friendly interface to the Siconos libraries. A scilab interface is also provided in the Front-End module.
• SICONOS/CONTROL This part is devoted to the implementation of control strategies of non smooth dynamical systems.
• SICONOS/MECHANICS. This part is dedicated to the modeling and the simulation of multi-body systems with 3D contacts, impacts and Coulomb’s friction. It uses the Siconos/Kernel as simulation engine but relies on a industrial CAD library (OpenCascade and pythonOCC) to deal with complex body geometries and to compute the contact locations and distances between B-Rep description and on Bullet for contact detection between meshes.
-
Functional Description:
Siconos is an open-source scientific software primarily targeted at modeling and simulating nonsmooth dynamical systems in C++ and in Python:
- Mechanical systems (rigid or solid) with unilateral contact and Coulomb friction and impact (nonsmooth mechanics, contact dynamics, multibody systems dynamics or granular materials).
- Switched Electrical Circuit such as electrical circuits with ideal and piecewise linear components: power converter, rectifier, Phase-Locked Loop (PLL) or Analog-to-Digital converter.
- Sliding mode control systems.
- Biology (Gene regulatory network). Other applications are found in Systems and Control (hybrid systems, differential inclusions, optimal control with state constraints), Optimization (Complementarity systems and Variational inequalities), Fluid Mechanics, and Computer Graphics.
-
Release Contributions:
Main changes:
[numerics] add sparse linear solver with a sparse rhs based on csparse [numerics] new implementation of NM_LU_solve and NM_Cholesky_solve [kernel] new implementation of linear solvers in SimpleMatrix The class SimpleMatrix owns a internal NumericsMatrix thats is used for linear system solving, based on Siconos/Numerics [numerics] add balancing matrice framework [numerics] add freezing contacts in Gauss seidel solvers [externals] add LDL support [mechanics] modify broadphase for Bullet [numerics] render the truncation in NM_entry [numerics] add matrix versioning [misc] automates the generation of docker end-user images 'siconos-ready' [misc] build with ninja
- URL:
-
Contact:
Vincent Acary
-
Participants:
Franck Pérignon, Maurice Bremond, Vincent Acary
6 New results
6.1 Nonlinear waves in granular chains
Participants: Guillaume James, Bernard Brogliato, Kirill Vorotnikov.
Granular chains made of aligned beads interacting by contact (e.g. Newton's cradle) are widely studied in the context of impact dynamics and acoustic metamaterials. In order to describe the response of such systems to impacts or vibrations, it is important to analyze different wave effects such as the propagation of compression waves (solitary waves or fronts) or localized oscillations (traveling breathers), or the scattering of vibrations through the chain. Such phenomena are strongly influenced by contact nonlinearities (Hertz force), spatial inhomogeneities and dissipation.In the works 80, 83, we analyze nonlinear oscillations in chains of impact oscillators, such as localized oscillations (breathers). In 80, the oscillations are obtained by continuation from the limit of vanishing coupling. In 83, a multiscale expansion is used to approximate breather waves generated by impacts in granular chains with local potentials.
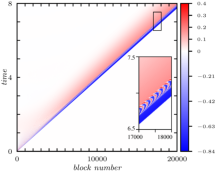
In the works 84, 18, 19, 9, we investigate the propagation of impacts in chains of beads with contact damping, using both analytical and numerical approaches. In 84, we show that the Kuwabara-Kono (KK) viscoelastic contact law is equivalent at leading order to a numerical dissipation for some classical first-order time-integration schemes. This result allows to simulate KK dissipation using numerical dissipation, without incorporating the nonsmooth terms of the KK model in dynamical equations. Conversely, it shows that studying the effects of KK dissipation on wave profiles allows to determine the effects of numerical dissipation. In 9, we show that granular chains with KK dissipation sustain traveling compression fronts that do not propagate steadily in nondissipative chains. The wave profiles are approximated using a special kind of multiscale expansion adapted to the strongly nonlinear contact forces, leading to a logarithmic KdV-Burgers equation (or a logarithmic Burgers equation for overdamped fronts).
In 18, 19, we derive an analytical approximation of the restitution coefficient for two-bead viscoelastic impacts under constant external loading. This allows in particular to approximate the critical damping above which beads do not detach after impact.
6.2 Systemic risk
Participants: Arnaud Tonnelier, Vincent Acary.
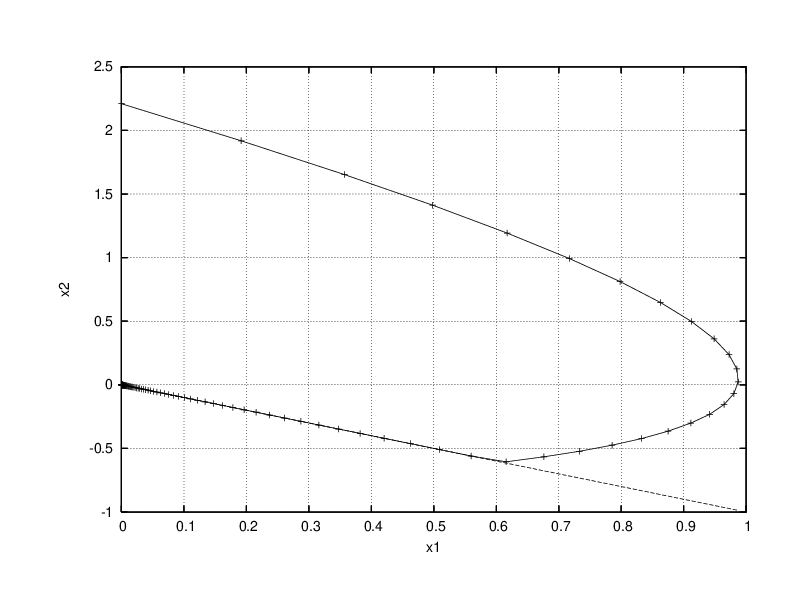
The overexploitation of natural resources questions the long-term sustainability of our society. Recently, a simple nature-society interrelations model, called the HANDY model, has been proposed by Montesharrei et al (2014) to address this concern with a special emphasis on the role of the stratification of the society. We analyse the dynamics of this model and we explore the influence of two parameters: the nature depletion rate and the inequality factor. We characterize the asymptotic states of the system through a bifurcation analysis and we derive several quantitative results on the trajectories. We examine the possible collapses, sustainable equilibria and oscillations. We show that some collapses are irreversible and, depending on the wealth production factor, a bistability regime between a sustainable equilibrium and cycles of collapse-and-regeneration can be obtained. We discuss the possible policies to avoid dramatic scenarios. Part of this work was the subject of Camille Julliard's master's internship and results are presented in an article in preparation.6.3 Hybrid Differential Algebraic equations
Participants: Vincent Acary, Bernard Brogliato, Alexandre Rocca.
In 101, we study differential algebraic equations with constraints defined in a piecewise manner using a conditional statement. Such models classically appear in systems where constraints can evolve in a very small time frame compared to the observed time scale. The use of conditional statements or hybrid automata are a powerful way to describe such systems and are, in general, well suited to simulation with event driven numerical schemes. However, such methods are often subject to chattering at mode switch in presence of sliding modes, or can result in Zeno behaviours. In contrast, the representation of such systems using differential inclusions and method from non-smooth dynamics are often closer to the physical theory but may be harder to interpret. Associated time-stepping numerical methods have been extensively used in mechanical modelling with success and then extended to other fields such as electronics and system biology. In a similar manner to the previous application of non-smooth methods to the simulation of piecewise linear ODEs, non-smooth event-capturing numerical scheme are applied to piecewise linear DAEs. In particular, the study of a 2-D dynamical system of index-2 with a switching constraint using set-valued operators, is presented. In 6 and in 17, we study classes of differential-algebraic linear complementarity systems which possess some passivity properties. Specifically, the implicit Euler time-discretisation is analysed: the one-step nonsmooth problem's wellposedness is shown, then the convergence of the discrete solutions is studied. Examples are in circuits with nonsmooth components (like ideal diodes).6.4 Numerical analysis of multibody mechanical systems with constraints
Participants: Vincent Acary, Maurice Brémond, Paul Armand, Franck Bourrier, Charlélie Bertrand.
This scientific theme concerns the numerical analysis of mechanical systems with bilateral and unilateral constraints, with or without friction 1. They form a particular class of dynamical systems whose simulation requires the development of specific methods for analysis and dedicated simulators 64.
6.4.1 Numerical solvers for frictional contact problems.
Participants: Vincent Acary, Maurice Brémond, Paul Armand.
In 29, we review several formulations of the discrete frictional contact problem that arises in space and time discretized mechanical systems with unilateral contact and three-dimensional Coulomb’s friction. Most of these formulations are well–known concepts in the optimization community, or more generally, in the mathematical programming community. To cite a few, the discrete frictional contact problem can be formulated as variational inequalities, generalized or semi–smooth equations, second–order cone complementarity problems, or as optimization problems such as quadratic programming problems over second-order cones. Thanks to these multiple formulations, various numerical methods emerge naturally for solving the problem. We review the main numerical techniques that are well-known in the literature and we also propose new applications of methods such as the fixed point and extra-gradient methods with self-adaptive step rules for variational inequalities or the proximal point algorithm for generalized equations. All these numerical techniques are compared over a large set of test examples using performance profiles. One of the main conclusion is that there is no universal solver. Nevertheless, we are able to give some hints to choose a solver with respect to the main characteristics of the set of tests.Recently, new developments have been carried out on two new applications of well-known numerical methods in Optimization:
- Interior point methods With the visit of Paul Armand, Université de Limoges, we co-supervise a M2 internship, Maksym Shpakovych on the application of interior point methods for quadratic problem with second-order cone constraints. The results are encouraging 105,26 and a publication in computational mechanics is in progress.
- Alternating Direction Method of Multipliers. In collaboration with Yoshihiro Kanno, University of Tokyo, the use of the Alternating Direction Method of Multipliers (ADMM) has been adapted to the discrete frictional contact problems. With the help of some acceleration and restart techniques for first-order optimization methods and a residual balancing technique for adapting the proximal penalty parameter, the method proved to be efficient and robust on our test bench examples. A publication is also in preparation on this subject.
6.4.2 Modeling and numerical methods for frictional contact problems with rolling resistance
Participants: Vincent Acary, Franck Bourrier.
In 3, the Coulomb friction model is enriched to take into account the resistance to rolling, also known as rolling friction. Introducing the rolling friction cone, an extended Coulomb's cone and its dual, a formulation of the Coulomb friction with rolling resistance as a cone complementarity problem is shown to be equivalent to the standard formulation of the Coulomb friction with rolling resistance. Based on this complementarity formulation, the maximum dissipation principle and the bi-potential function are derived. Several iterative numerical methods based on projected fixed point iterations for variational inequalities and block-splitting techniques are given. The efficiency of these method strongly relies on the computation of the projection onto the rolling friction cone. In this article, an original closed-form formulae for the projection on the rolling friction cone is derived. The abilities of the model and the numerical methods are illustrated on the examples of a single sphere sliding and rolling on a plane, and of the evolution of spheres piles under gravity.
6.4.3 Numerical modeling of rockfall trajectory
Participants: Vincent Acary, Franck Bourrier.
Rockfall propagation models are routinely used for the quantitative assessment of rockfall hazard. Their capacities and limitations remain difficult to assess due to the limited amount of exhaustive experimental data at the slope scale.
The article 5 presents experiments of block propagation performed in a quarry located in Authume (France). A total of more than one hundred blocks were released on two propagation paths. The propagation of the blocks was assessed by measuring the block stopping points as well as their kinematics at specific locations of the paths, called evaluation screens. Significant variability of the stopping points and of the block kinematics at the evaluation screens was observed and preferential transit and deposit zones were highlighted. The analysis of the results showed predominant effect of topography, in particular that related to topographical discontinuities. Significant influence of local and small scale parameters (e.g. block orientation, local topography) was also highlighted. These conclusions are of particular interest for researchers or practitioners who would like to assess the relevance of propagation modelling tools considering this complex study site. In this configuration, the quality of block propagation simulations should notably rely on the accuracy of digital terrain models, and on the integration of local conditions effects using physically based approaches.
Complementary with the research held in 5, the predictive capabilities of block propagation models after a preliminary calibration phase is investigated. It is focused on models integrating the shape of blocks since, despite their sound physical bases, they remain less used than lumped-mass approaches due to their more recent popularisation. We first performed an expert-based calibration based on the use of the 2D model and, second, evaluated the predictive capabilities of the calibrated model in 2D and in 3D using the remaining part of the experimental results. The calibrated model simulations predict the main characteristics of the propagation : after a calibration phase on sufficient amount of soil types, the model may be used in a predictive manner. The adequacy between 2D and 3D simulations also favors applicability of the model since easier and faster calibrations based on 2D simulations only can be envisaged. As classically observed for block propagation models, the model is not sufficient to predict the details of the velocity and stopping points but provides accurate prediction of the global ranges of these quantities, in particular of the extreme values. To lift these limitations in terms of predictive capabilities, more advanced calibration procedures based on optimization techniques can constitute a promising perspective as it is studied in 4.
6.4.4 Numerical modeling of fracture in solids
Participants: Vincent Acary, Franck Bourrier, Nicholas Collins-Craft.
In 20, a new extrinsic cohesive model is developed together with a consistent time–stepping scheme to simulate fracture in quasi-brittle material like rock or concrete. An extrinsic cohesive zone model with a novel unload-reload behaviour is developed in the framework of non-smooth mechanics. The model is extended to include the effects of dynamics with impact, and is discretised in such a way that it can be written as a Linear Complementarity Problem (LCP). This LCP is proved to be well-posed, and to respect the discrete energy balance of the system. Finally, the LCP system is validated numerically, in both statics and dynamics, by simple test cases, and more involved finite element simulations that correspond to standard test geometries in the literature. The results correspond well with those of other authors, while also demonstrating the simulations’ ability to resolve with relatively large time steps while respecting the energetic balance.
6.4.5 Finite element modeling of cable structures
Participants: Vincent Acary, Charlélie Bertrand.
Standard finite element discretization for cable structures suffer from several drawbacks. The first one is related to the mechanical assumption that the cable can not support compression. Standard formulations do not take into account this assumption. The second drawback comes from the high stiffness of the cable model when we deal with large lengths with high Young modulus such as cable ropeways installations. In this context, standard finite element applications cannot avoid compressive solutions and have huge difficulties to converge. In a forthcoming paper, we propose to a formulation based on a piecewise linear modeling of the cable constitutive behavior where the elasticity in compression is canceled. Furthermore, a dimensional analysis help us to formulate a problem that is well-balanced and the conditioning of the problem is diminished. The finite element discretization of this problem yields a robust method where convergence is observed with the number of elements and the nonlinear solver based on nonsmooth Newton strategy is converging up to tight tolerances. The convergence with the number of element allows one to refine the mesh as much as we want that will be of utmost importance for applications with contact and friction. Indeed, a fine discretization with respect to the whole length of the cable will be possible in the contact zone. This work has been the object of the following publication 47. In 14, consistent reduced order modeling has been proposed and comparisons with the model developped in 47 has been performed.
6.5 Analysis and Control of Set-Valued Systems
Participants: Bernard Brogliato, Christophe Prieur, Vincent Acary, Mohammad Rasool Mojallizadeh, Félix Miranda-Villatoro.
6.5.1 Discrete-time differentiators
The article 11 deals with the problem of online differentiation of noisy signals. In this context, several types of differentiators including linear, sliding-mode based, adaptive, Kalman, and ALIEN differentiators are studied through mathematical analysis and numerical experiments. To resolve the drawbacks of the exact differentiators, new implicit and semi-implicit discretization schemes are proposed in this work to suppress the digital chattering caused by the wrong time-discretization of set-valued functions as well as providing some useful properties, e.g., finite-time convergence, invariant sliding-surface, exactness. A complete comparative analysis is presented in the manuscript to investigate the behavior of the discrete-time differentiators in the presence of several types of noises, including white noise, sinusoidal noise, and bell-shaped noise. Many details such as quantization effect and realistic sampling times are taken into account to provide useful information based on practical conditions. Many comments are provided to help the engineers to tune the parameters of the differentiators.
In 25, the experimental analysis of discrete-time differentiators implemented in closed-loop control systems is achieved. To this end, two laboratory setups, namely an electro-pneumatic system and a rotary inverted pendulum have been used to implement 25 different differentiators. Since the selected laboratory setups behave differently in the case of dynamic response and noise characteristics, it is expected that the results remain valid for a wide range of control applications. The validity of several theoretical results, which have been already reported in the literature using mathematical analysis and numerical simulations, has been investigated, and several comments are provided to allow one to select an appropriate differentiation scheme in practical closed-loop control systems.
6.5.2 Robust sliding-mode control: continuous and discrete-time
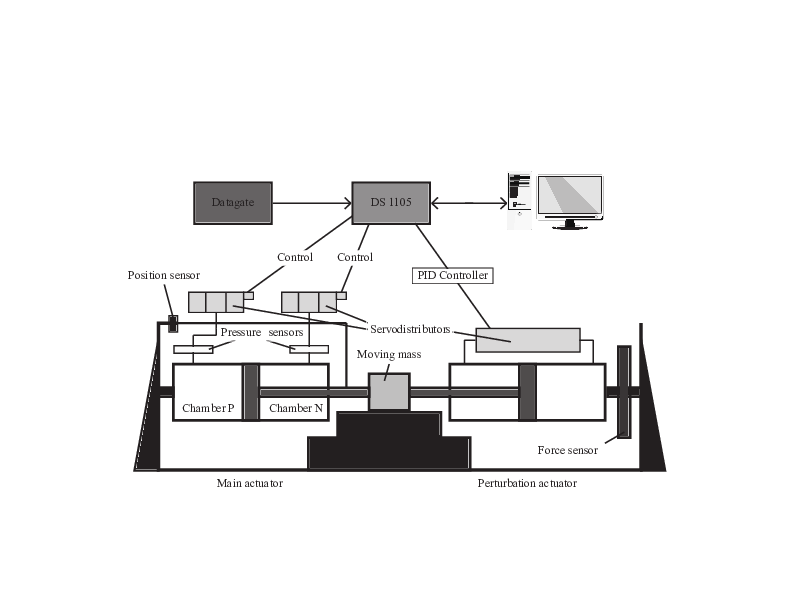
The implicit method for the time-discretization of set-valued sliding-mode controllers was introduced in 33, 35. The backstepping approach is used in 92 to design a continuous-time and a discrete-time nested set-valued controller that is able to reject unmatched disturbances (a problem that is known to be tough in the sliding-mdoe control community). In 99, 98 we continue the analysis of the implicit discretization of set-valued systems, this time oriented towards the consistency of time-discretizations for homogeneous systems, with one discontinuity at zero (sometimes called quasi-continuous, strangely enough). The discrete-time analysis of the twisting and the super-twisting algorithms are tackled in 76, 52. A tutorial/survey of the implicit Euler method applied to set-valued sliding-mode control can be found in 8. In 12, we propose an upgrade of a linear controller to a set-valued sliding-mode controller, and we study the discrete-time implementation. Experimental validations are made on a laboratory setup available at INRIA Lille (an inverted rotary pendulum). In 22, the sliding-mode control of a nonsmooth hydraulic actuator is analysed. The implicit Euler discretisation is carefully studied.
6.5.3 Analysis of set-valued Lur'e dynamical systems
Lur'e systems are very popular in the Automatic Control field since their introduction by Lur'e in 1944. In 55 we propose a very complete survey/tutorial on the set-valued version of such dynamical systems (in finite dimension) which mainly consist of the negative feedback interconnection of an ODE with a maximal monotone set-valued operator. The first studies can be traced back to Yakubpovich in 1963 who analysed the stability of a linear time invariant system with positive real constraints, in negative feedback connection with a hysteresis operator. About 600 references are analysed from the point of view of the mathematical formalisms (Moreau's sweeping process, evolution variational inequalities, projected dynamical systems, complementarity dynamical systems, maximal monotone differential inclusions, differential variational inequalities), the relationships between these formalisms, the numerous fields of application, the well-posedness issues (existence, uniqueness and continuous dependence of solutions), and the stability issues (generalized equations for fixed points, Lyapunov stability, invariance principles). In 7, we propose a pedagogical survey about the use of passivity (in Willems' sense) in the well-posedness analysis of set-valued Lur'e systems.
6.5.4 Optimal control of LCS
The quadratic and minimum time optimal control of LCS as in (6) is tackled in 109, 110. This work relies on the seminal results by Guo and ye (SIAM 2016), and aims at particularizing their results for LCS, so that they become numerically tractable and one can compute optimal controllers and optimal trajectories. The basic idea is to take advantage of the complementarity, to construct linear complementarity problems in the Pontryagin's necessary conditions which can then be integrated numerically, without having to guess a priori the switching instants (the optimal controller can eb discontinuous and the optimal trajectories can visit several modes of the complementarity conditions). In 24 we study the optimal control of complementarity Lagrangian systems. The analysis is based on the transformation of the system with impacts, into a system without impacts, using an equivalent Filippov's differential inclusion with absolutely continuous solutions. The difficulty is in the correct design of the sliding surface so that the post-impact velocity is computed corectly.
6.5.5 Bifurcations of equilibria in LCS
It is well-known that linear complementarity systems can undergo bifurcations at which equilibria, limit cycle, or chaotic solutions can appear, dissappear or change stability. From a control viewpoint, it is important to know the range of parameters for which such changes take place. The work 23 addresses this issue by proposing a novel notion of equivalence between LCPs (linear complementarity problems) that permits to make a classification of steady state bifurcations in dynamic LCS. The proposed approach takes advantage of the geometric structure of the problem and allows to closely mimic the bifurcation theory of smooth maps. This type of results allows us, for instance, to design LCSs with asymptotic behaviors showing multiple steady states, as is the case in negative resistance circuits. In addition, a full classification of bifurcations for the planar LCP is provided.
6.5.6 Dissipative systems
The third edition of the book Dissipative Systems Analysis and Control has been released . Also a short proof of equivalence of so-called side conditions for strictly positive real (SPR) transfer functions is done in 67, closing a long debate in the Automatic Control community about the frequency-domain characterization of SPR transfer matrices. An erratum/addendum for the third edition of our monograph on dissipative systems, is available at 15.
6.6 Impact modelling
Participants: Bernard Brogliato, Guillaume James.
In 18, 19, we study the derivation of approximations of the coefficient of restitution associated with a class of nonlinear spring/dashpot contact/impact models (the most well-known being the so-called Simon-Hunt-Crossley, and Kuwabara-Kono models). The originality of our work (compared to previous results obtained by authors like Poschel and Brilliantov) is that the external load which acts on the system during the collision, is taken into account. This load can influence the restitution coefficient. The approximated expressions are obtained by careful analysis of suitable expansions. A piece of code which allows one to calculate the coefficients has been developed.7 Bilateral contracts and grants with industry
Participants: Vincent Acary, Bernard Brogliato, Christophe Prieur.
7.1 Bilateral grants with industry
Schneider Electric
This action started in 2001 with the post-doc of V. Acary co–supported by Schneider Electric and CNRS. With some brief interruptions, this action is still active and should further continue. It concerns mainly the simulation and modeling of multi–body systems with contact, friction and impacts with the application for the virtual prototyping of electrical circuit breakers.
During these years, various forms of collaborations have been held. Two PhD thesis have been granted by Schneider Electric (D.E. Taha and N. Akhakdar) accompanied with research contracts between INRIA and Schneider Electric. Schneider Electric participated also the ANR project Saladyn as a main partner.
Without going into deep details of the various actions over the years, the major success of this collaboration is the statistical tolerance analysis of the functional requirements of the circuit breakers with respect to clearance in joints and geometrical tolerances on the parts. Starting from the geometrical descriptions (CAD files) of a mechanism with prescribed tolerances on the manufacturing process, we perform worst-case analysis and Monte–Carlo simulations of the circuit breaker with Siconos and we record the variations in the functional requirements. The difficulty in such simulations are the modeling of contact with friction that models the joints with clearances. The results of these analysis enable Schneider Electric to define the manufacturing precision that has a huge impact of the production cost (Schneider Electric produces several millions of C60-type circuit breaker per year). Note that it is not possible to perform such simulations with the existing software codes of the market.
At the beginning, our interlocutor at Schneider Electric was the innovation (R&D) department. Now, we are working and discussing with the business unit, Division Power and Dinnov (M. Abadie, E. Boumediene, X. Herreros) in charge of designing and producing the circuit–breakers. The targeted users are the R&D engineers of Schneider Electric that use simulation tools for designing new models or improving existing circuit breakers. This collaboration continues with new modeling and simulation challenges (flexible parts, multiple impact laws) with the CIFRE PhD of Rami Sayoud.
STRMTG. Service Technique des remontées mécaniques et des transports guidés.
We have started with STRMTG a research contract about modelling, simulation and control of cable-transport systems. In such systems, the question of the coupling between the nonlinear dynamics of cables and their supports with unilateral contact and friction appears now to be determinant in order to increase the performances of the cableway systems, especially for urban transportation systems.
8 Partnerships and cooperations
Participants: Vincent Acary, Franck Bourrier, Bernard Brogliato, Felix Miranda, Mohammad Rasool Mojallizadeh.
8.1 International initiatives
8.1.1 Associate Teams in the framework of an Inria International Lab or in the framework of an Inria International Program
Inria Project Lab (IPL): ModeliScale, Languages and Compilation for Cyber-Physical System Design.
The project gathers researchers from three Inria teams, and from three other research labs in Grenoble and Paris area (see table 1).
| Name | Team | Inria Center or Laboratory |
| Vincent Acary | Bipop | Inria Grenoble Rhône Alpes |
| Bernard Brogliato | ||
| Albert Benveniste | Hycomes Inria Rennes | |
| Benoît Caillaud | Bretagne Atlantique | |
| Khalil Ghorbal | ||
| Marc Pouzet | Parkas | ENS |
| Tim Bourke | Inria Paris | |
| Goran Frehse | Tempo | Verimag-univ. Grenoble Alpes |
| Antoine Girard | L2S-CNRS, Saclay | |
| Eric Goubault | Cosynus | LIX, École Polytechnique, |
| Sylvie Putot | Saclay |
The main objective of ModeliScale is to advance modeling technologies (languages, compile-time analyses, simulation techniques) for CPS combining physical interactions, communication layers and software components. We believe that mastering CPS comprising thousands to millions of components requires radical changes of paradigms. For instance, modeling techniques must be revised, especially when physics is involved. Modeling languages must be enhanced to cope with larger models. This can only be done by combining new compilation techniques (to master the structural complexity of models) with new mathematical tools (new numerical methods, in particular).
ModeliScale gathers a broad scope of experts in programming language design and compilation (reactive synchronous programming), numerical solvers (nonsmooth dynamical systems) and hybrid systems modeling and analysis (guaranteed simulation, verification). The research program is carried out in close cooperation with the Modelica community as well as industrial partners, namely, Dassault Systèmes as a Modelica/FMI tool vendor, and EDF and Engie as end users.
8.2 National initiatives
ANR project Digitslid
B. Brogliato coordinates the ANR project Digitslid (PRC, ANR-18-CE40-0008-01), Differentiateurs et commandes homogenes par modes glissants en temps discret: l'approche implicite. Partners: LS2N (Ecole Centrale de Nantes), INRIA Lille Nord Europe (team Non-A-Post), and Tripop. October 2018-September 2021. 12 participants overall (3 post-doc students recruited by the project, 3 Ph.D. students supported by other means). Total financial support by the ANR: 338 362 euros (100 762 for Tripop, 18 months of post-doc).
FUI Modeliscale
The ModeliScale FUI focuses on the modeling, simulation and analysis of large cyber-physical systems. It federates the research activities of several teams, covering a broad spectrum of topics, namely hybrid systems modeling & verification, numerical analysis, programming language design and automatic control. Our research agenda includes the following tracks:
- New compilation techniques for Modelica modelers: structural analysis of multimode DAE (Differential Algebraic Equations) systems, modular compilation, combining state-machines and non-smooth dynamical systems (complementarity dynamical systems and Filippov differential inclusions), contract-based specification of cyber-physical systems requirements, requirements capture using under-/over-determined DAE systems.
- Simulation of large cyber-physical systems: distributed simulation, discretization methods for non-smooth dynamical systems, space-/time-adaptive discretization methods for multimode DAE systems, quantized state solvers (QSS).
- Guaranteed numerics: guaranteed simulation of non-smooth and hybrid dynamical systems, numerical methods preserving invariant properties of hybrid systems, contract-based reasoning methods.
Project Levage, IRT NanoElec, Grenoble
This project deals with the modeling and control of overhead cranes, in collaboration with Schneider Electric. It involves M.R. Mojallizadeh (two-year contract funded by the IRT), B. Brogliato and C. Prieur. The major objective is to better understand how to minimize sway effects that may be created during operation. The major issues for modeling are how to choose in the set of finite-dimensional (pendulum-like), infinite-dimensional (string or wave equations), and finite-element-method based, models. One major issue for feedback control, concerns the choice of the measured cable angles.
Project SsONDS LabEx PERSIVAL ANR-15-IDEX-02 and ANR-11-LABX-0025-01
Self-sustained Oscillations in Nonsmooth Dynamical Systems. October 2021 - September 2024. INRIA Grenoble TRIPOP team (F. Miranda-Villatoro, B. Brogliato) and Gipsa-Lab UGA (F. Ferrante). Coordinated by F. Miranda-Villatoro. The SsONDS project aims at developing theoretical methods for the analysis, design, and control of systems with robust self-sustained oscillations in environments with uncertainties (as for instance, lack of knowledge of certain parameters of the model, or the presence of external disturbances). Potential applications include the design of central pattern generators (CPGs) for motion control, and mathematical analysis of models from computational biology. Total fundings for TRIPOP = 99 keuros.
8.3 Regional initiatives
Smart Protect
The project aims to develop and test an innovative structure for protection against natural hazards. It is funded by the Auvergne Rhône-Alpes region as part of the R&D operation BOOSTER 2019. The partnerships (GEOLITHE INNOV, GEOLITHE, MYOTIS, INRIA and INRAE) and the operational solutions and tools developed as part of the "Smart-Protect" project will constitute major advances in the methods and means for the natural risk management, both nationally and internationally. GEOLITHE INNOV is leader of the SMART-PROTECT collaborative project. The financial support for INRIA is devoted to the post-doc of Nicholas Collins Craft for the study and the development of cohesive zone model for fracture mechanics simulation.
OCIRN
The OCIRN Project is supported and accompanied by the Auvergne Rhône-Alpes Region. The partners of the project are Géolithe, CAN, INRIA, department of Isère, Halias Technologies and INDURA cluster. The general ambition of the OCIRN project is to support the development of the natural gravity hazards sector in the development and integration of new digital practices. Natural gravity hazards are a growing concern in the context of global warming generating an increase in the frequency and intensity of events, combined with the reduction of societal and economic tolerance of these risks. A functional ambition of the project is to contribute to the integrated and reasoned management of natural gravitational risks, coordinated with the projects of development of the territories, in order to allow important progress in the reduction of the risks, the continuity of service of the installations and the optimization of the operations of mitigation and protection. The OCIRN project aims at 3 major objectives:
- The capitalization of data and the improvement of information flows between the actors of natural risks via the digital platform.
- The sharing of the uses of innovative software of simulation and modeling via the software bricks of simulation and modeling on digital platform.
- The homogenization and standardization of practices through the application of methods chosen by the sector (C2ROP) via the methodological software bricks on the digital platform.
These three objectives are addressed through access to shared tools on a scalable and collaborative digital platform made available to the sector. In addition, related training, data collection and processing services will be set up.
9 Dissemination
Participants: Vincent Acary, Franck Bourrier, Bernard Brogliato, Felix Miranda.
9.1 Promoting scientific activities
9.1.1 Scientific events: organisation
Member of the organizing committees
- Vincent Acary is co-organisor (with O. Bruls and R. Leine) of the mini-symposium Nonsmooth Dynamics, 10th Nonlinear Dynamics Conference (ENOC 2022), Lyon, July 2022.
- B. Brogliato is organising a mini-symposium at ENOC 2022 (Lyon, July 2022).
9.1.2 Journal
Member of the editorial boards
- Vincent Acary is Technical Managing editor and co-founder of the Journal of Theoretical, Computational and Applied Mechanics, which is a scholarly journal, provided on a Fair Open Access basis, without cost to both readers and authors. The Journal aims to select publications of the highest scientific calibre in the form of either original research papers or reviews.
- Franck Bourrier is associate editor of the journal Landslides
Reviewer - reviewing activities
- Vincent Acary was reviewer for Multibody Systems Dynamics, Mechanical Systems and Signal Processing, Computational Mechanics, SIAM Journal on Control and Optimization, Nonlinear Dynamics, Systems and Control Letters
- Franck Bourrier was reviewer for Natural Hazards and Earth Systems Sciences, European Journal of Environmental and Civil Engineering, Landslides, Computer and Geotechnics, Plant and Soils, Nature Communications
9.1.3 Leadership within the scientific community
9.1.4 Scientific expertise
- Vincent Acary was expert of a Fondecyt project (Chile) and a MIAI project of UGA.
- Franck Bourrier was expert of the Fonds national suisse (FNS)
9.2 Teaching - Supervision - Juries
9.2.1 Teaching
- Licence : G. James, Introduction to Numerical Methods, 31 hETD, L3, Grenoble INP - Pagora (1st year).
- Licence : G. James, Normed Vector Spaces, 26 hETD, L2, Prépa INP, Grenoble.
- Master : G. James, Numerical Methods, 91 hETD, M1, Grenoble INP - Ensimag (1st year).
- Master : G. James, Dynamical Systems, 45 hETD, M1, Grenoble INP - Ensimag (2nd year).
- Master : Vincent Acary, 17H éq TD Systèmes dynamiques, ENSIMAG 2A.
- Licence : Franck Bourrier, 30H éq TD Slope Stabilitiy, IUT GCCD 2nd year, Université Grenoble Alpes.
- Master : Franck Bourrier, 5H éq TD Modélisation des chutes de blocs, Master GAIA, Université Savoie Mont-Blanc.
- Master : Franck Bourrier, 30H éq TD Slope Stabilitiy, Polytech’ Grenoble 4th year, Université Grenoble Alpes.
- Licence : Félix Miranda-Villatoro, 32H TD, Real Analysis, 1st year, Université Grenoble Alpes.
- Master : Félix Miranda-Villatoro, 32 H TD, Numerical Optimization, 1st year, Grenoble INP, Université Grenoble Alpes
- European Summer School: Bernard Brogliato (May 2021). 20h. European Embedded Control Institute, International Graduate School on Control. In collaboration with A. Tanwani (LAAS-CNRS, Toulouse, France). Set-valued Lur'e Dynamical Systems.
9.2.2 Supervision
- B. Brogliato and F. Miranda-Villatoro supervise the Ph.D. thesis of Aya Younes.
- G. James and B. Brogliato supervise the post-doc intern of A. Chatterjee.
- V. Acary and F. Bourrier supervise the post-doc intern of N. Collins Craft.
- V. Acary and F. Bourrier supervise the PhD thesis of B. Viano.
- V. Acary and P. Armand supervise the PhD thesis of H.M. Nguyen.
- V. Acary and C.H. Lamarque (ENTPE) supervise the PhD thesis of C. Bertrand.
9.2.3 Juries
- Vincent Acary was president of the Jury of the PhD Thesis of Thomas Langlade on 22th October 2021. (Vulnerability and risk analyzes of structures subjected to earthquake-induced building pounding with a non-smooth contact dynamics method, ED162 : Mécanique, Energétique, Génie Civil, Acoustique de Lyon/ Université de Lyon et INSA de Lyon).
- Vincent Acary was referee of the PhD Thesis of Marianne Souaiby on 15th October 2021 ( Lyapunov Functions and Ensemble Approximations for Constrained Systems using Semidefinite Programming, INSA Toulouse)
- Franck Bourrier was referee of the PhD Thesis of Rime Chehade on 2nd December 2021 (Développement d'un modèle numérique d'impact pour la quantification de la vulnérabilité du bâti exposé au risque de coulées de débris et crues éclair , Université Clermont Auvergne)
- Franck Bourrier was referee of the PhD Thesis of Davide Guccione (An experimental investigation offragmentation occurrence and outcome in the context of rockfall, University of Newcastle, Australia)
10 Scientific production
10.1 Major publications
- 1 bookNumerical methods for nonsmooth dynamical systems. Applications in mechanics and electronics.Lecture Notes in Applied and Computational Mechanics 35. Berlin: Springer. xxi, 525~p. 2008
- 2 bookNonsmooth mechanics.Communications and Control Engineering SeriesModels, dynamics and controlSpringer, [Cham]2016, xxii+629URL: http://dx.doi.org/10.1007/978-3-319-28664-8
10.2 Publications of the year
International journals
International peer-reviewed conferences
Scientific book chapters
Reports & preprints
Other scientific publications
10.3 Cited publications
- 27 bookNonsmooth modeling and simulation for switched circuits..Lecture Notes in Electrical Engineering 69. Dordrecht: Springer. xxiii, 284~p.2011, URL: http://dx.doi.org/10.1007/978-90-481-9681-4
- 28 inbookAdvanced Topics in Nonsmooth Dynamics.To appearAcary, V. and Brüls. O. and Leine, R. (eds). Springer Verlag2018, On solving frictional contact problems: formulations and comparisons of numerical methods.
- 29 incollectionOn solving contact problems with Coulomb friction: formulations and numerical comparisons.Advanced Topics in Nonsmooth Dynamics - Transactions of the European Network for Nonsmooth DynamicsJune 2018, 375-457
- 30 inproceedingsMechanical simulation of the Exomars rover using Siconos in 3DROV.ASTRA 2013 - 12th Symposium on Advanced Space Technologies in Robotics and AutomationESA/ESTECNoordwijk, NetherlandsMay 2013, URL: http://hal.inria.fr/hal-00821221
- 31 techreportFCLIB: a collection of discrete 3D Frictional Contact problems.RT-0444INRIAFebruary 2014, 34
- 32 articleHigher order Moreau's sweeping process: mathematical formulation and numerical simulation.Mathematical Programming Ser. A1132008, 133-217
- 33 articleImplicit Euler numerical scheme and chattering-free implementation of sliding mode systems.Systems and Control Letters595doi:10.1016/j.sysconle.2010.03.0022010, 284--295
- 34 bookNumerical methods for nonsmooth dynamical systems. Applications in mechanics and electronics.Lecture Notes in Applied and Computational Mechanics 35. Berlin: Springer. xxi, 525~p. 2008
- 35 articleChattering-Free Digital Sliding-Mode Control With State Observer and Disturbance Rejection.IEEE Transactions on Automatic Control575may 2012, 1087--1101URL: http://dx.doi.org/10.1109/TAC.2011.2174676
- 36 articleEnergy conservation and dissipation properties of time-integration methods for the nonsmooth elastodynamics with contact.Zeitschrift für Angewandte Mathematik und Mechanik9552016, 585--603
- 37 articleHigher order event capturing time--stepping schemes for nonsmooth multibody systems with unilateral constraints and impacts..Applied Numerical Mathematics622012, 1259--1275URL: http://hal.inria.fr/inria-00476398
- 38 techreportNonsmooth fracture dynamics using a cohesive zone approach.RR-6032INRIA2006, 56URL: http://hal.inria.fr/inria-00110560/en/
- 39 articleProjected event-capturing time-stepping schemes for nonsmooth mechanical systems with unilateral contact and Coulomb's friction.Computer Methods in Applied Mechanics and Engineering2562013, 224--250URL: http://www.sciencedirect.com/science/article/pii/S0045782512003829
- 40 articleNumerical Simulation of Piecewise-Linear Models of Gene Regulatory Networks Using Complementarity Systems Theory.Physica D269January 2013, 103--199
- 41 bookA Variational Approach to Nonsmooth Dynamics. Applications in Unilateral Mechanics and Electronics.SpringerBriefs in MathematicsSpringer Verlag2017
- 42 articleMultibody systems with 3D revolute joint clearance, modelling, numerical simulation and experimental validation: an industrial case study.Multibody System Dynamics2017
- 43 articleThe algorithmic analysis of hybrid systems.Theoretical Computer Science13811995, 3--34
-
44
articleError analysis of generalized-
Lie group time integration methods for constrained mechanical systems.Numerische Mathematik1291Jan 2015, 149--179URL: https://doi.org/10.1007/s00211-014-0633-1 - 45 articleA Fast Iterative Shrinkage-Thresholding Algorithm for Linear Inverse Problems.SIAM Journal on Imaging Sciences212009, 183-202
- 46 bookPiecewise-smooth dynamical systems : theory and applications.Applied mathematical sciencesLondonSpringer2008, URL: http://opac.inria.fr/record=b1122347
- 47 articleA robust and efficient numerical finite element method for cables.International Journal for Numerical Methods in Engineering12118September 2020, 4157-4186
- 48 articleSolitary waves in excitable systems with cross-diffusion.Proc. R. Soc. A4612005, 3711-3730
- 49 articleRockfall rebound: comparison of detailed field experiments and alternative modelling approaches.Earth Surface Processes and Landforms3762012, 656--665URL: http://dx.doi.org/10.1002/esp.3202
- 50 articleToward objective rockfall trajectory simulation using a stochastic impact model.Geomorphology11032009, 68--79URL: http://www.sciencedirect.com/science/article/pii/S0169555X09001251
- 51 articleFeedback control of multibody systems with joint clearance and dynamic backlash: a tutorial.Multibody System DynamicsAug 2017, URL: https://doi.org/10.1007/s11044-017-9585-4
- 52 articleThe implicit discretization of the super-twisting sliding-mode control algorithm.IEEE Transactions on Automatic Control658A preliminary version of this article was presented at the 15th Int. Workshop on Variable Structure Systems VSS'2018, Graz, Austria, July 2018.August 2020, 3707-3713
- 53 inproceedingsGlobally stable implicit Euler time-discretization of a nonlinear single-input sliding-mode control system.2015 54th IEEE Conference on Decision and Control (CDC)Dec 2015, 5426-5431URL: http://dx.doi.org/10.1109/CDC.2015.7403069
- 54 articleOn the control of complementary-slackness juggling mechanical systems.IEEE Transactions on Automatic Control452Feb 2000, 235-246URL: http://dx.doi.org/10.1109/9.839946
- 55 articleDynamical systems coupled with monotone set-valued operators: Formalisms, applications, well-posedness, and stability.SIAM Review621February 2020, 3-129
- 56 articleExistence and uniqueness of solutions for non-autonomous complementarity dynamical systems.J. Convex Anal.173-42010, 961--990
-
57
articleSimultaneous enforcement of constraints at position and velocity levels in the nonsmooth generalized-
scheme.Computer Methods in Applied Mechanics and Engineering281November 2014, 131-161 -
58
miscHybrid vs. nonsmooth dynamical systems.
://synchron2014.inria.fr/wp-content/uploads/sites/13/2014/12/Caillaud-nsds.pdfhttp://synchron2014.inria.fr/wp-content/uploads/sites/13/2014/12/Caillaud-nsds.pdf2014 - 59 articleTime finite element based Moreau‐type integrators.International Journal for Numerical Methods in Engineering11432018, 215-231URL: https://onlinelibrary.wiley.com/doi/abs/10.1002/nme.5741
- 60 articleLanguages and tools for hybrid systems design.Foundations and Trends in Electronic Design Automation11/22006, 1--193
-
61
articleA nonsmooth generalized-
scheme for flexible multibody systems with unilateral constraints.International Journal for Numerical Methods in Engineering9682013, 487--511URL: http://dx.doi.org/10.1002/nme.4563 - 62 bookThe Linear Complementarity Problem.Boston, MAAcademic Press, Inc.1992
- 63 articleState of the art in rockfall – forest interactions.Schweizerische Zeitschrift fur Forstwesen15862007, 128-141URL: https://doi.org/10.3188/szf.2007.0128
- 64 articleThe Contact Dynamics method: A nonsmooth story .Comptes Rendus Mécanique3463March 2018, 247-262
- 65 articleNovel quantitative indicators to characterize the protective effect of mountain forests against rockfall.Ecological Indicators672016, 98--107URL: http://www.sciencedirect.com/science/article/pii/S1470160X16300449
- 66 bookFinite-dimensional Variational Inequalities and Complementarity Problems. I & IISpringer Series in Operations ResearchSpringer Verlag NY. Inc.2003
- 67 articleA direct proof of the equivalence of side conditions for strictly positive real matrix transfer functions.IEEE Transactions on Automatic Control651January 2020, 450-452
- 68 bookDifferential Equations with Discontinuous Right Hand Sides.Dordrecht, the NetherlandsKluwer1988
- 69 articleA primal--dual regularized interior-point method for convex quadratic programs.Mathematical Programming Computation412012, 71--107URL: http://dx.doi.org/10.1007/s12532-012-0035-2
- 70 articleNew results on Painlevé Paradoxes.European Journal of Mechanics - A. solids181999, 653-677
- 71 bookComplementarity and Variational Inequalities in Electronics.Academic Press2017
-
72
articleOn preserving dissipativity properties of linear complementarity dynamical systems with the
-method.Numerische Mathematik1252013, 601--637 - 73 inproceedingsThe Theory of Hybrid Automata.Proceedings of the Eleventh Annual IEEE Symposium on Logic in Computer Science (LICS)1996, 278-292
- 74 bookConvex Analysis and Minimization Algorithms.I and IISpringer Verlag, Berlin1993
- 75 bookFundamentals of Convex Analysis.Springer Verlag2001
- 76 articleLyapunov stability analysis of the implicit discrete-time twisting control algorithm.IEEE Transactions on Automatic Control656June 2020, 2619-2626
- 77 articleLyapunov stability and performance analysis of the implicit discrete sliding mode control.IEEE Transactions on Automatic Control6110In press2016, 3016-3030
- 78 articleImplicit discrete-time twisting controller without numerical chattering: analysis and experimental results.Control Engineering Practice462016, 129--141
- 79 incollectionExperimental results on implicit and explicit time-discretization of equivalent-control-based sliding-mode control.Recent Trends in Sliding Mode ControlIET2016
- 80 incollectionPeriodic motions of coupled impact oscillators.Advanced Topics in Nonsmooth Dynamics, Transactions of the European Network for Nonsmooth DynamicsSpringer International Publishing2018, 93-134
- 81 articleBreathers in oscillator chains with Hertzian interactions.Physica D2512013, 39--59
- 82 articlePeriodic travelling waves and compactons in granular chains.J. Nonlinear Sci.222012, 813-848
- 83 articleTravelling breathers and solitary waves in strongly nonlinear lattices.Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences3762127July 2018, 20170138:1-25
- 84 articleKuwabara-Kono numerical dissipation: a new method to simulate granular matter.IMA Journal of Applied Mathematics851February 2020, 27-66
- 85 articleNon Smooth Contact dynamics approach of cohesive materials.Philisophical Transactions : Mathematical, Physical & Engineering Sciences, The Royal Society, London AA35917892001, 2497--2518
- 86 articleNonlinear normal modes, Part I: A useful framework for the structural dynamicist.Mechanical Systems and Signal Processing231Special Issue: Non-linear Structural Dynamics2009, 170--194URL: http://www.sciencedirect.com/science/article/pii/S0888327008001015
- 87 phdthesisBifurcation in Discontinuous Mechanical Systems of Filippov-Type.Technische Universiteit Eindhoven2000
- 88 articleSimulation of rockfall trajectories with consideration of rock shape.Multibody System Dynamics322Aug 2014, 241--271URL: https://doi.org/10.1007/s11044-013-9393-4
- 89 bookStability and Convergence of Mechanical Systems with Unilateral Constraints.36Lecture Notes in Applied and Computational MechanicsSpringer Verlag2008
- 90 articleNonlinear waves in a strongly resonant granular chain.Nonlinearity2016, 3496-3527
- 91 articleMultivalued Robust Tracking Control of Lagrange Systems: Continuous and Discrete--Time Algorithms.IEEE Transactions on Automatic ControlPP992017, 1URL: http://dx.doi.org/10.1109/TAC.2017.2662804
- 92 articleContinuous and discrete-time stability of a robust set-valued nested controller.Automatica107September 2019, 406-417
- 93 techreportSolitary waves in the excitable Burridge-Knopoff model.RR-8996To appear in Wave MotionINRIA Grenoble - Rhône-AlpesDecember 2016
- 94 articleTraveling waves in a spring-block chain sliding down a slope.Phys. Rev. E 96960122272017
-
95
articleA method of solving a convex programming problem with convergence rate
.Soviet Mathematics Doklady2721983, 372--376 - 96 bookMultiple Impacts in Dissipative Granular Chains.72Lecture Notes in Applied and Computational MechanicsXXII, 234 p. 109 illus.Springer Verlag2014
- 97 articleComputation of Lyapunov Exponents for dynamical system with impact.Applied Mathematial Sciences452010, 237--252
- 98 articleConsistent Discretization of Finite-time and Fixed-time Stable Systems.SIAM Journal on Control and Optimization5712019, 78-103
- 99 inproceedingsConsistent Discretization of Locally Homogeneous Finite-time Stable Control Systems.ECC 2019 - 18th European Control ConferenceNaples, ItalyIEEEJune 2019, 1616-1621
- 100 articleGranular crystals: Nonlinear dynamics meets materials engineering.Physics Today68442015
- 101 techreportIndex-2 hybrid DAE: a case study with well-posedness and numerical analysis.Inria - Research Centre Grenoble – Rhône-AlpesNovember 2019
- 102 bookConvex Analysis.Princeton University Press1970
- 103 articleTimestepping schemes for nonsmooth dynamics based on discontinuous Galerkin methods: Definition and outlook.Mathematics and Computers in Simulation952013, 180--199URL: http://www.sciencedirect.com/science/article/pii/S0378475412001231
- 104 articleHalf-explicit timestepping schemes on velocity level based on time-discontinuous Galerkin methods.Computer methods in Applied Mechanics in Engineering290152015, 250--276
- 105 mastersthesisNumerical optimization for frictional contact problems.MA ThesisUniversité de LimogesSeptember 2019
- 106 bookNumerics of Unilateral Contacts and Friction. -- Modeling and Numerical Time Integration in Non-Smooth Dynamics.47Lecture Notes in Applied and Computational MechanicsSpringer Verlag2009
- 107 articleMcKean caricature of the FitzHugh-Nagumo model: traveling pulses in a discrete diffusive medium.Phys. Rev. E670361052003
- 108 conferenceOptimal control of linear complementarity systems.IFAC World Congress on Automatic ControlToulouse, France2017
- 109 inproceedingsOptimality conditions for the minimal time problem for Complementarity Systems.MECHATRONICS 2019 - NOLCOS 2019 - 8th IFAC Symposium on Mechatronic Systems - 11th IFAC Symposium on Nonlinear Control Systems52IFAC-PapersOnLine16Vienne, AustriaElsevierSeptember 2019, 239-244
- 110 articleQuadratic Optimal Control of Linear Complementarity Systems: First order necessary conditions and numerical analysis.IEEE Transactions on Automatic Control656June 2020, 2743-2750
- 111 articleExperimental comparisons between implicit and explicit implementations of discrete-time sliding mode controllers: towards input and output chattering suppression.IEEE Transactions on Control Systems Technology2352015, 2071--2075