
Keywords
Computer Science and Digital Science
- A1.2.6. Sensor networks
- A1.3. Distributed Systems
- A2.3. Embedded and cyber-physical systems
- A2.5.2. Component-based Design
- A4.4. Security of equipment and software
- A4.5. Formal methods for security
- A5.1.4. Brain-computer interfaces, physiological computing
- A5.9.2. Estimation, modeling
- A5.10.5. Robot interaction (with the environment, humans, other robots)
- A6.1.1. Continuous Modeling (PDE, ODE)
- A6.3.2. Data assimilation
- A6.4.1. Deterministic control
- A6.4.6. Optimal control
Other Research Topics and Application Domains
- B1.1.9. Biomechanics and anatomy
- B1.2.1. Understanding and simulation of the brain and the nervous system
- B2.2.1. Cardiovascular and respiratory diseases
- B2.2.2. Nervous system and endocrinology
- B2.2.6. Neurodegenerative diseases
- B2.5.1. Sensorimotor disabilities
- B2.5.3. Assistance for elderly
1 Team members, visitors, external collaborators
Research Scientists
- Christine Azevedo Coste [Team leader, INRIA, Senior Researcher, HDR]
- François Bailly [INRIA, Researcher]
- François Bonnetblanc [INRIA, Researcher, HDR]
- Charles Fattal [Centre Bouffard-Vercelli, USSAP Perpignan, Medical Doctor, HDR]
- Thomas Guiho [INRIA, SRP until September then ISFP since October 2022]
- David Guiraud [INRIA, Senior Researcher, until Nov 2022, 50% CAMIN - 50% NEURINNOV COMPANY, HDR]
- Benoît Sijobert [INSTITUT ST-PIERRE]
Post-Doctoral Fellows
- Etienne Moullet [INRIA, from Oct 2022]
- Lucas Oliveira Da Fonseca [INRIA]
- Fernanda Rodrigues Ferreira Lopes [UNIV MONTPELLIER]
- Thekla Stefanou [INRIA, until Jul 2022]
PhD Students
- Laurence Colas [REEV SAS, CIFRE, from Oct 2022]
- Ronan Le Guillou [CHU TOULOUSE]
- Felix Schlosser-Perrin [INRIA]
- Clément Trotobas [INRIA]
- Clotilde Turpin [INNOPSYS, CIFRE, from Nov 2022]
- Lucie William [INRIA]
Technical Staff
- Sam Durand [INRIA, Engineer, from May 2022]
- Olivier Rossel [INRIA, Engineer]
Interns and Apprentices
- Jonathan Baum [UNIV MONTPELLIER, from Apr 2022]
- Jeremy Blanquinque [INRIA, Intern, from Mar 2022 until Jul 2022]
- Christian Bou Chahine [INRIA, Intern, from Mar 2022 until Aug 2022]
- Marie Ghekiere [INRIA, Intern, until Feb 2022]
- Yohann Wurbel [INRIA, Intern, from Mar 2022 until Aug 2022]
Administrative Assistant
- Annie Aliaga [INRIA]
Visiting Scientist
- Andrew Murray [UNIV DAYTON, from May 2022]
2 Overall objectives
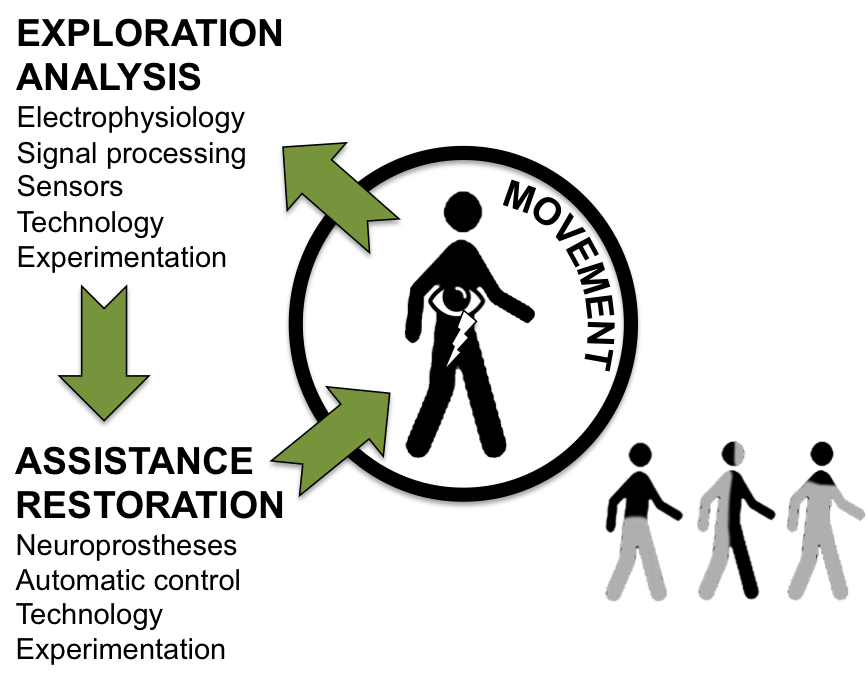
CAMIN research team is dedicated to the design and development of realistic neuroprosthetic solutions for sensorimotor deficiencies in collaboration with clinical partners. Our efforts are focused on clinical impact: improving the functional evaluation and/or patients quality of life. Movement is at the center of our investigative activity, and the exploration and understanding of the origins and control of movement are one of our two main research priorities. Indeed, optimizing the neuroprosthetic solutions depends on a deeper understanding of the roles of the central and peripheral nervous systems in motion control. The second research priority is movement assistance and/or restoration. Based on the results from our first research focus, neuroprosthetic approaches are deployed (Figure 1).
Electrical stimulation (ES) is used to activate muscle contractions by recruiting muscle fibers, just as the action potentials initiated in motoneurons would normally do. When a nerve is stimulated, both afferent (sensitive) and efferent (motor) pathways are excited. ES can be applied externally using surface electrodes positioned on the skin over the nerves/muscles intended to be activated or by implantation with electrodes positioned at the contact with the nerves/muscles or neural structures (brain and spinal cord). ES is the only way to restore movement in many situations.
Although this technique has been known for decades, substantial challenges remain, including: (i) detecting and reducing the increased early fatigue induced by artificial recruitment, (ii) finding solutions to nonselective stimulation, which may elicit undesired effects, and (iii) allowing for complex amplitude and time modulations of ES in order to produce complex system responses (synergies, coordinated movements, meaningful sensory feedback, high-level autonomic function control).
We investigate functional restoration, as either a neurological rehabilitation solution (incomplete spinal cord injury (SCI), hemiplegia) or for permanent assistance (complete SCI). Each of these contexts imposed its own set of constraints on the development of solutions.
Functional ES (FES) rehabilitation mainly involves external FES, with the objective to increase neurological recuperation by activating muscle contractions and stimulating both efferent and afferent pathways. Our work in this area naturally led us to take an increasing interest in brain organization and plasticity, as well as central nervous system (brain, spinal cord) responses to ES. When the objective of FES is a permanent assistive aid, invasive solutions can be deployed. We pilot several animal studies to investigate neurophysiological responses to ES and validate models. We also apply some of our technological developments in the context of human per-operative surgery, including motor and sensory ES.
Camin research is focused on exploring and understanding human movement in order to propose neuroprosthetic solutions in sensorimotor deficiency situations to assist or restore movement. Exploration and understanding of human movement will allow us to propose assessment approaches and tools for diagnosis and evaluation purposes, as well as to improve FES-based solutions for functional assistance.
We have chosen not to restrict our investigation spectrum to specific applications but rather to deploy our general approach to a variety of clinical applications in collaboration with our medical partners. Our motivation and ambition is to have an effective clinical impact.
3 Research program
3.1 Exploration and understanding of the origins and control of movement
One of Camin’s areas of expertise is motion measurement, observation and modeling in the context of sensorimotor deficiencies. The team has the capacity to design advanced protocols to explore motor control mechanisms in more or less invasive conditions in both animal and human.
Human movement can be assessed by several noninvasive means, from motion observation (MOCAP, IMU) to electrophysiological measurements (afferent ENG, EMG, see below). Our general approach is to develop solutions that are realistic in terms of clinical or home use by clinical staff and/or patients for diagnosis and assessment purposes. In doing so, we try to gain a better understanding of motor control mechanisms, including deficient ones, which in turn will give us greater insight into the basics of human motor control. Our ultimate goal is to optimally match a neuroprosthesis to the targeted sensorimotor deficiency.
The team is involved in research projects including:
-
Peripheral nervous system (PNS): modeling, exploration and electrophysiology
Electroneurography (ENG) and electromyography (EMG) signals inform about neural and muscular activities. The team investigates both natural and evoked ENG/EMG through advanced and dedicated signal processing methods. Evoked responses to ES are very precious information for understanding neurophysiological mechanisms, as both the input (ES) and the output (evoked EMG/ENG) are controlled. Camin has the expertise to perform animal experiments (rabbits, rats, earthworms and big animals with partners), design hardware and software setups to stimulate and record in harsh conditions, process signals, analyze results and develop models of the observed mechanisms. Experimental surgery is mandatory in our research prior to invasive interventions in humans. It allows us to validate our protocols from theoretical, practical and technical aspects.
-
Central nervous system (CNS) exploration
Stimulating the CNS directly instead of nerves enables direct activation of the neural networks responsible for generating functions. Once again, if selectivity is achieved the number of implanted electrodes and cables would be reduced, as would the energy demand. We have investigated spinal electrical stimulation in animals (pigs) for urinary track and lower limb function management. This work is very important in terms of both future applications and the increase in knowledge about spinal circuitry. The challenges are technical, experimental and theoretical, and the preliminary results have enabled us to test some selectivity modalities through matrix electrode stimulation. This research area will be further intensified in the future as one of the ways to improve neuroprosthetic solutions.
We intend to gain a better understanding of the electrophysiological effects of Direct Electrical Stimulation (DES) through electroencephalographic (EEG) and electrocorticographic (ECoG) recordings in order to optimize anatomo-functional brain mapping, to better understand brain dynamics and plasticity, and to improve surgical planning, rehabilitation, and the quality of life of patients.
-
Muscle models and fatigue exploration
Muscle fatigue is one of the major limitations in all FES studies. Simply, the muscle torque varies over time even when the same stimulation pattern is applied. As there is also muscle recovery when there is a rest between stimulations, modeling the fatigue is almost an impossible task. Therefore, it is essential to monitor the muscle state and assess the expected muscle response by FES to improve the current FES system in the direction of greater adaptive force/torque control in the presence of muscle fatigue.
-
Movement interpretation
We intend to develop ambulatory solutions to allow ecological observation. We have extensively investigated the possibility of using inertial measurement units (IMUs) within body area networks to observe movement and assess posture and gait variables. We have also proposed extracting gait parameters like stride length and foot-ground clearance for evaluation and diagnosis purposes.
3.2 Movement assistance and/or restoration
The challenges in movement restoration are: (i) improving nerve/muscle stimulation modalities and efficiency and (ii) global management of the function that is being restored in interaction with the rest of the body under voluntary control. For this, both local (muscle) and global (function) controls have to be considered.
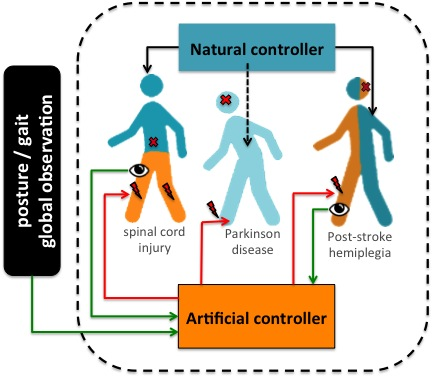
Online modulation of ES parameters in the context of lower limb functional assistance requires the availability of information about the ongoing movement. Different levels of complexity can be considered, going from simple open-loop to complex control laws (Figure 2).
Real-time adaptation of the stimulation patterns is an important challenge in most of the clinical applications we consider. The modulation of ES parameters to adapt to muscle fatigue or environmental changes needs for advanced adaptive controllers based on sensory information. A special care in minimizing the number of sensors and their impact on patient motion should be taken.
4 Application domains
4.1 Movement Assistance
CAMIN develops neuroprosthetic solutions dedicated to restore or assist movements of paralyzed limbs. Among the considered functions we can cite: pedalling, grasping or walking. Different users are considered: individuals with post-stroke hemiplegia, people with spinal cord lesions and persons with Parkinson disease.
We have also started to develop skills in orthosis design.
4.2 Movement Analysis
For the purpose of assisting movement, CAMIN has developped an important expertise in movement interpretation using a large range of sensors: inertial measurement units, MOCAP systems, encoders, goniometers... Various Classification methods are used depending on the objective.
This knowledge is applied in other applications than movement assistance, like in MEDITAPARK project were we developped an application (PARAKEET) embedded in a smartwatch to monitor hand tremor in persons with parkinson disease.
4.3 Evoked electrophysiology
CAMIN develops solutions to trigger, record and process electrophysiological signals evoked by electrical stimulation applied to various neural tissues. These evoked responses are used to control the activity of the excitable tissue, to probe its electrophysiological status for diagnostic purposes and to investigate the conductivity/connectivity between the stimulation and the recording sites (electrophysiological mapping).
These neural engineering procedures can be applied to muscle, nerve, spinal cord and brain, in animals and humans.
For instance, electrical stimulations can be applied externally and non-invasively on muscles to induce muscle contractions as well as invasively on the human brain in order to guide neurosurgeries.
5 Social and environmental responsibility
5.1 Impact of research results
CAMIN research is clearly dedicated to applications which intend to improve quality of life and/or self esteem of individuals with sensori-motor deficiencies.
We give a very important place to ethics of our work. Christine Azevedo is a member of INRIA ethical committee INRIA.
Our activities are associated to an important working load on designing protocols and obtaining authorizations from ethical committees and/or health agencies. We list in the following the protocols that have obtained authorizations and were valid in 2021.
- Assessment of the Functional Impact of a Close-loop Controlled Prehension Neuroprosthesis in Post-stroke Patients (PREHENS-STROKE). Evaluation of optimal piloting modalities and their impact on the grasping capacity in Functional Electrical Stimulation of Finger Extensor Muscles in the Hemiplegic Patient in Chronic Phase. CHU Nîmes, CHU Toulouse. Protocol RCB 2018-A02144-51. ClinicalTrials.gov Identifier: NCT04804384
- Measure of the Potential Evoked by Electric Stimulation (PE & CE). CHU Montpellier. Protocol RCB 2014-A00056-43. ClinicalTrials.gov Identifier: NCT02509442
- Mindfulness-based Intervention for People With Parkinsonian Tremor (MEDITAPARK). CHU Montpellier. ID-RCB: 2020-A01927-32. ClinicalTrials.gov Identifier: NCT05168046
- Exofinger: a tool for entering objects. COERLE (autorisation nº 2021-47 Exofinger)
- SOFTMOCAP : Comparaison de trois méthodes d’analyse des mouvements de la main chez des sujets valides. COERLE (autorisation nº 2022-57 SOFTMOCAP)
- AGILISTIM: Functional Evaluation of Grip Restoration in tetraplegic patients by implanted neural stimulation. ID-RCB: 2022-A00205-3815.
- Ethics approval for an experiment on hybrid orthosis at UFMG Brazil
6 Highlights of the year
- David Guiraud left the team in November 2022 to join the startup NEURINNOV on a full time basis after maintaining dual membership for two years
- François Bonnetblanc permanently joined the team as Research Scientist
- Thomas Guiho obtained a permanent position (ISFP) following the 2022 Junior Research Scientist competition
7 New software and platforms
7.1 New software
7.1.1 NeuroPrehens
-
Keywords:
Python, Qt, GUI (Graphical User Interface), Medical, Medical applications, Real-time application
-
Functional Description:
Python application using a framework of input as EMG, IMU, Foot switchs, Camera etc. for controlling a Functional Electrical Stimulation neuroprosthesis in real time closed loop for prehension restoration in hemiplegic stroke patients.
-
Contact:
Christine Azevedo Coste
-
Participants:
David Gasq, Ronan Le Guillou, Christine Azevedo Coste
-
Partner:
CHU de Toulouse
7.1.2 IMUSEF
-
Keywords:
Inertial module unit, Movement analysis, Software platform, Embedded systems
-
Scientific Description:
Modular embedded framework for real-time control of Functional Electrical Stimulation in closed loop with sensor feedback.
-
Functional Description:
IMUSEF allows to acquire data from inertial sensors in order to estimate a segment orientation or a joint angle. From this, an event can be defined to be used to control an electrical stimulator.
-
Release Contributions:
1.0 : First fully functional version application focused with stimulator control, sensor data acquisition and analysis and decisional algorithm (https://www.mdpi.com/545320). 2.0 : Full rework as a modular framework, allowing selection of decisional algorithm, stimulator system, sensors etc. and optional communication and control in real time from a remote fully featured Graphical User Interface through autonomous hotspot wifi.
-
News of the Year:
New major version (2.0).
- URL:
- Publication:
-
Contact:
Christine Azevedo Coste
-
Participants:
Benoît Sijobert, Ronan Le Guillou, Christine Azevedo Coste, Martin Schmoll
-
Partner:
Université de Montpellier 2
7.1.3 ID-IMU
-
Name:
Intention Decoder based on IMU
-
Keywords:
Inertial module unit, Classification, Movement analysis, Recognition of human movement, Artificial intelligence
-
Scientific Description:
The software process IMU data (accelerometer and gyroscope, 3 axes each) by differentiating it at each new data point, and band-pass filtering it. Then, in a moving window fashion, it extract the following features: rms (root mean square), average, and psd (power spectrum density). Finally, it uses these features as input for training or classifying detected movements. Movements are detected based on a threshold applied to the resultant movement data in the window. The classifier is a nu-SVM (nu-support vector machine) with linear kernel. Most parameters are editable in the parameters.json file.
-
Functional Description:
Users can wear movement sensors (IMUs) on different parts of their bodies and train the system to identify specific and arbitrary movements. These can then be used to activate or trigger other devices, such as neuroprostheses, or robots. As is, this software can read and classify movement data stored in files according to the AGILIS standards by the time of its publication. The real time reading of sensor data and device actuation is out of scope.
-
Release Contributions:
This versions adds a feature for saving data at intermediate steps, in addition to the final classification results.
- URL:
-
Contact:
Christine Azevedo Coste
-
Participants:
Lucas Oliveira Da Fonseca, Christine Azevedo Coste
7.1.4 ANT4ROTOR
-
Name:
ANT+ communication for Rotor 2INPOWER
-
Keywords:
Motion analysis, Communicating devices, Power monitoring, Monitoring
-
Functional Description:
Based on the ANT+ communication protocol's Python library, this project unlocks the low frequency limits (4Hz) from the default ANT+ protocol to allow acquisition of the ROTOR "Fast Mode" data streaming (50Hz) through ANT+. This enables data acquisition and monitoring of crank angle, cadence, average power, torque applied on the left and right side independently and more, at frequencies sufficient to analyse the pedalling dynamics inside of a turn rather than having a simple overview of it.
-
Release Contributions:
Version 1 : Complete and functional project. Tested on ROTOR 2INPOWER only, with a RPI 3B.
- URL:
-
Contact:
Christine Azevedo Coste
-
Participants:
Martin Schmoll, Ronan Le Guillou, Christine Azevedo Coste
7.2 New platforms
7.2.1 RESCUEGRAPH: Gait analysis platform for rodents
Participants: Sam Durand, François Bailly, Christine Azevedo.
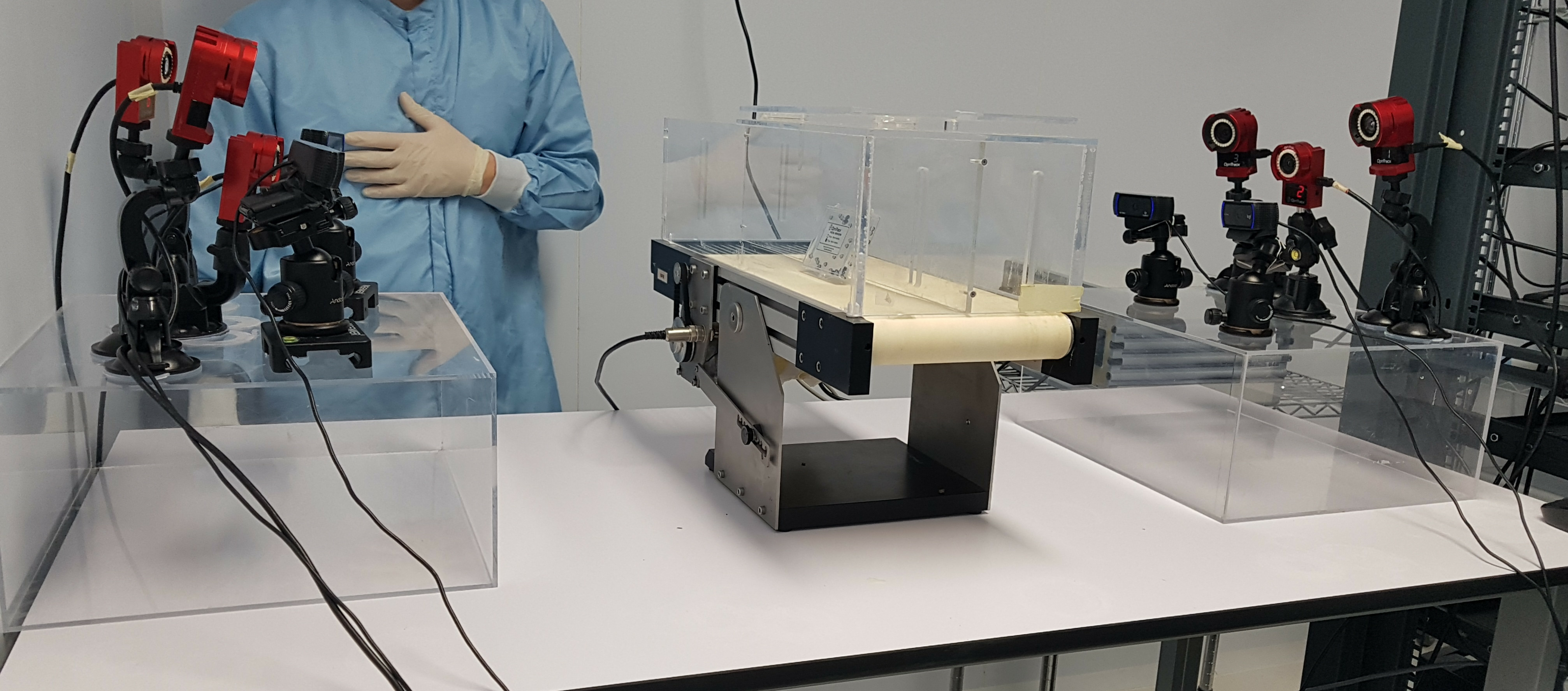
Within RESCUEGRAPH project (FLAGERA), the objective is to set up a gait platform to analyze rat gait and assess electrical stimulation effects. In early tests (june 2022), INRIA evaluated the existing equipment at UAB: an optoelectronic motion capture system made up of 3 infrared cameras (Optitrack Flex 13), a USB synchronization hub (Optitrack Optihub 2), and a motion capture software (Optitrack Motive 1.5). The device was used to track the gait of 2 intact rats by using passive reflective motion capture markers. The position of 3 markers (hip, knee, ankle) was captured unilaterally over 5 consecutive steps inside a 1m plexiglas corridor. INRIA has added extra cameras (Optitrack Flex 13) compatible with UAB ones and has ordered smaller reflective markers (Optitrack facial markers of diameter 3mm and 4mm) to improve the motion capture robustness and accuracy. The system was implemented in the UAB lab in January 2023. Tests were made on 2 intact rats. A first setup made of 3 UAB FLEX 13 cameras and 3 INRIA FLEX 3 cameras was used to capture 5 markers (3mm in diameter) unilaterally. Over the different trials, 7 consecutive steps in a 1-meter corridor could be acquired. The gait was irregular and captured data further needed post-processing. Indeed, the rat stopped walking several times in the corridor.
In a second setup, a gait treadmill was used. The 6 previously used cameras were split into two groups to allow capturing both sides of the treadmill. This setup allowed capturing the rat's gait bilaterally for more than 20 consecutive steps. Post-processing was therefore simplified because the risk of masking is reduced as the cameras are facing the 5 markers and the gait is not interrupted as often as in the corridor situation.

7.2.2 AGILISTIM: grasping function assessment
Participants: Sam Durand, François Bailly, Christine Azevedo.
A platform was developped for AGILISTIM protocol in order to allow measuring hand gesture kinematics and record the developped forces (see the 'New Results' section for more details on the Agilis project).

8 New results
8.1 Function restoration based on invasive functional electrical stimulation approaches
8.1.1 AGILISTIM: Implanted multi-contact epineural stimulation to restore hand function in complete upper-limb paralysis
Participants: Lucie William, Lucas Fonseca, Christine Azevedo, David Guiraud, Charles Fattal, Jacques Teissier [Clinique St Jean Sud de France], Antoine Geffrier [AP-HP Paris, France], Arthur Hiairassary, David Andreu [Neurinnov, France].
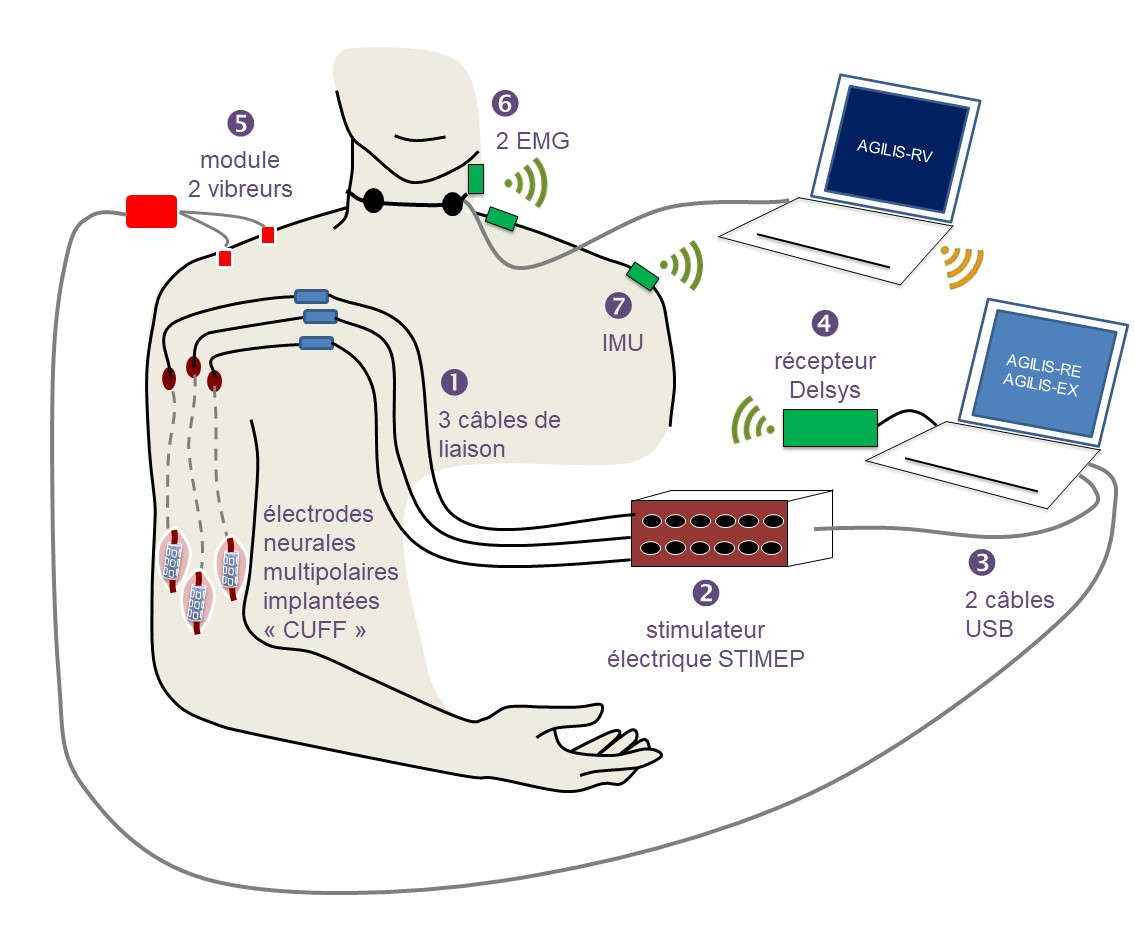
In 2020, within AGILIS project (EIT Health), two multi-contact neural cuff electrodes were placed around radial and median nerves of 2 subjects with high tetraplegia C4, AIS A, group 0 of the International Classification for Surgery of the Hand in Tetraplegia (NCT04306328). The electrodes were maintained during 28 days. The purpose was to study the safety and capability of these electrodes to generate synergistic motor activation and functional movements and to test control interfaces that allow subjects to trigger pre-programmed stimulation sequences. The device consisted of a pair of epineural electrodes and percutaneous cables with two extracorporeal connection cables inserted during a surgical procedure and removed after 28 days (see Fig.3).
8.1.2 Link between ENG/EMG/selective configurations
Participants: Lucie William, José Zariffa [UHN Toronto Rehab. Institute], Christine Azevedo, David Guiraud.
This project was conducted in Toronto in Professor Zariffa's team with funding from the MITACS grant.
The aim of he study was to evaluate the possible link between the evoked Electroneurogram (ENG) and Electromyogram (EMG) induced by a selective fascicular stimulation. The hypothesis is that stimulating individual fascicles leads to individual muscle's activation that can be measured through evoked EMG. If the hypothesis is true then evoked ENG as the image of the input of muscle's activation should reflect this selectivity through spatial discrimination.
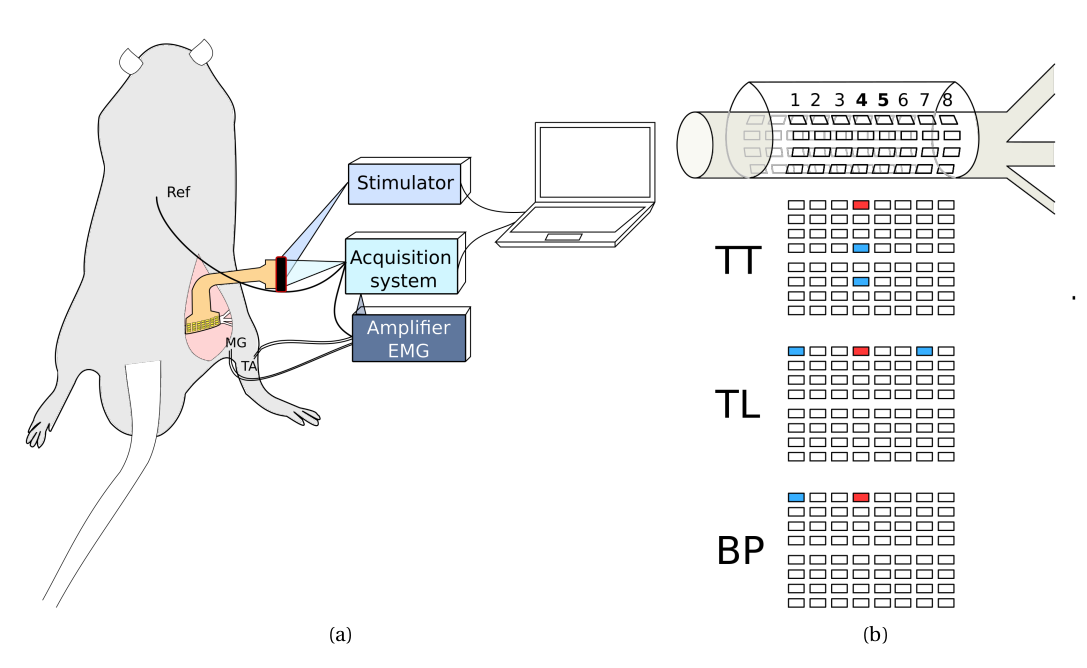
To do so, one multi-contact neural cuff electrode was placed around the sciatic nerve of 6 retired male rats. The cuff electrode was able to stimulate part of the nerve through contact's selection together with anode steering current activation and record the ENG signal around the nerve in different locations at the same time (Fig.3). Three different types of configuration (repartition of current) were applied on the 8 contacts of rows 4 and 5 of the electrode.
The purpose was to study the link between the ENG and EMG depending on the configuration of stimulation (see Fig.3). The evoked-EMG were recorded using four intramuscular electrodes (two in the medial gastrocnemius (MG) and two in the tibialis anterior (TA), two antagonist muscles innervated respectively by the tibial and peroneal branches of the sciatic nerve).
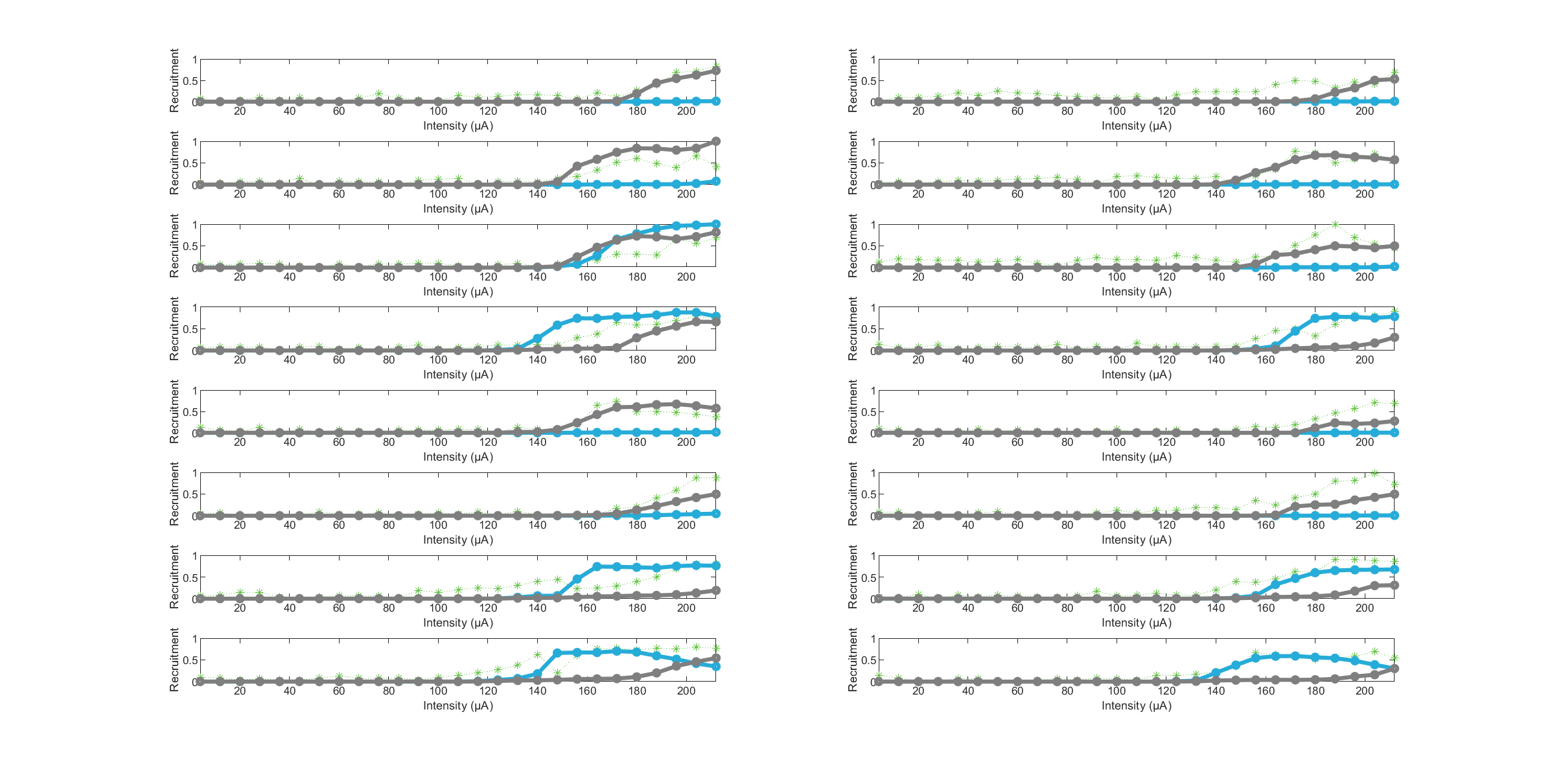
The recruitment curves were calculated for the EMG signal and the ENG activity. An increase of the ENG activity was observed when the EMG activity appears (see Fig.7) and a correlation between the ENG and the EMG was calculated.
The results prove the ability of activating selectively the TA and the MG muscles and record the sensory ENG activity due to the muscle activation.
8.2 Movement assistance and rehabilitation using non invasive functional electrical stimulation
8.2.1 Post Stroke upper limb neuroprosthesis : Projects Prehen-Stroke & Grasp-Again
Participants: Ronan Le Guillou, Christine Azevedo, David Gasq [CHU Toulouse].
The improvement of the grasp abilities remains a challenge in 50% of post-stroke subjects who have not recovered functional grasping due to paralysis of the finger’s extensor muscles. Following the ePrehension-Stroke study in 2019-2020 and its informative results, a new study was started. The PHRCi Prehen-Stroke project (ClinicalTrials.gov Identifier: NCT04804384), aims to evaluate the piloting modalities and the functional impact of a grasping neuroprosthesis in the vascular hemiparetic patient (fig.8). The addition of new features like voice control was completed last year and inclusions of participants began in mid 2021. As of the end of 2022, a total of 15 patients were successfully included and carried out the protocol. Inclusions are expected to continue in 2023, notably with the opening of another inclusion center in the medical rehabilitation center of the CHU of Nîmes in Le Grau-du-Roi, collaborating with the CHU of Toulouse on this study.
An abstract on the evaluation of preliminary results of the first 8 participants was submitted and accepted for oral presentation at the September 2022 BMT FES Workshop congress in Innsbruck 24.
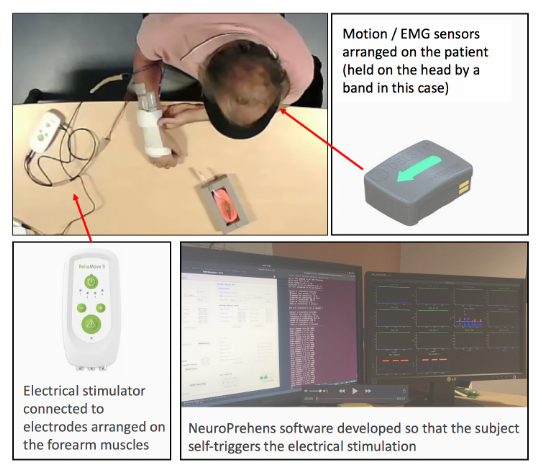
An embedded version of this grasping neuroprosthesis based on the CE marked FESIA Grasp upper-limb rehabilitation stimulator (fig.9) was designed, developed and tested throughout the year. This embedded version will be used in the Grasp-Again protocol aiming to further evaluate the functional impact of such devices on the grasping abilities of hemiplegic patients at home.

The Grasp-Again study follows in the footsteps of the still ongoing Prehen-Stroke protocol, and was officially opened on November 22, following the validation of the French Ethics Committee. Inclusions are expected to start in Q1 of 2023 with the participants using the grasp neuroprosthesis device at home for 2 month long sessions. The ClinicalTrial.gov ID of this protocol is : NCT05625113. The software APPs of this platform can be found at https://bil.inria.fr/fr/software/view/3520/tab and https://bil.inria.fr/fr/software/view/3559/tab as the IMUSEF and NeuroPrehens projects respectively, with the Bil Ids: Software_3520 and Software_3559.
8.2.2 Post Stroke upper limb rehabilitation with tangible BCI : GRASP-IT
Participants: Laurent Bougrain [LORIA, France], Ronan Le Guillou [CHU Toulouse], Christine Azevedo, David Gasq [CHU Toulouse, France], Lucas Fonseca.
Stroke is a major cause of disability in adults. The GRASP-IT project aims at improving the motor recovery of the upper limb of post-stroke hemiplegic patients by designing and using a gamified system that integrates complementary stimulation modalities (functional electrical, haptic and tangible stimulation) in brain-computer interfaces (BCIs) based on the generation of kinesthetic motor imaginations (KMI) (fig.10).
The Grasp-It project (ANR), proposes to design and evaluate the usability (including the effectiveness of the interactions with respect to the stimulation of the motor and somatosensory cortex) and the acceptability of the interface, called GRASP-IT, and of the interactions it induces. This project integrates both the design of the solutions and their evaluation, through an ambitious clinical evaluation including 75 patients in 3 functional rehabilitation centers in France. The GRASP-IT project is planned over 48 months to allow the design and validation of evaluation methods (preliminary and final) within a multicenter clinical protocol.
As collaborators in this project, and one of the clinical centers [CHU Toulouse], and despite the start of the clinical experiments being delayed to 2023, we continued developing and maintaining the module allowing Functional Electrical Stimulation as a feedback modality for the Grasp-IT project.

8.3 Movement assistance involving Hybrid orthoses
Hybrid motor neuroprosthesis (HMN) is an innovative approach to neurological rehabilitation to facilitate daily activities' performance and motor function recovery. It combines the advantages of two technologies: motor neuroprostheses and robot-assisted therapy (RT) or mechanical orthosis. HMN can potentially result in a device that is overall lighter (and thus more portable) than a non-hybrid rehabilitation device. On the other hand, it can produce greater forces and more precise control than functional electrical stimulation (FES). Moreover, since part of the force is provided by the actuator, the FES does not need to be as intense to produce the same movement, thus delaying the onset of muscle fatigue.
8.3.1 User requirements for upper limb hybrid neuroprosthesis
Participants: Fernanda Ferreira, Lucas Fonseca, Christine Azevedo, Clément Trotobas, Ronan Le Guillou, Charles Fattal.
A multicenter pilot study is being conducted in different countries on healthcare professionals and people with neurological disorders to investigate the essential requirements of potential users that need to be met during the development of upper limb hybrid neuroprosthesis. Previous studies have investigated user requirements concerning upper limb robotic therapy, prosthesis devices and assistive technology. However, the user’s requirements for hybrid upper-limb neuroprosthesis are still unclear. This project will promote a higher level of compliance, acceptance, and satisfaction with the use of the device and minimize user abandonment.
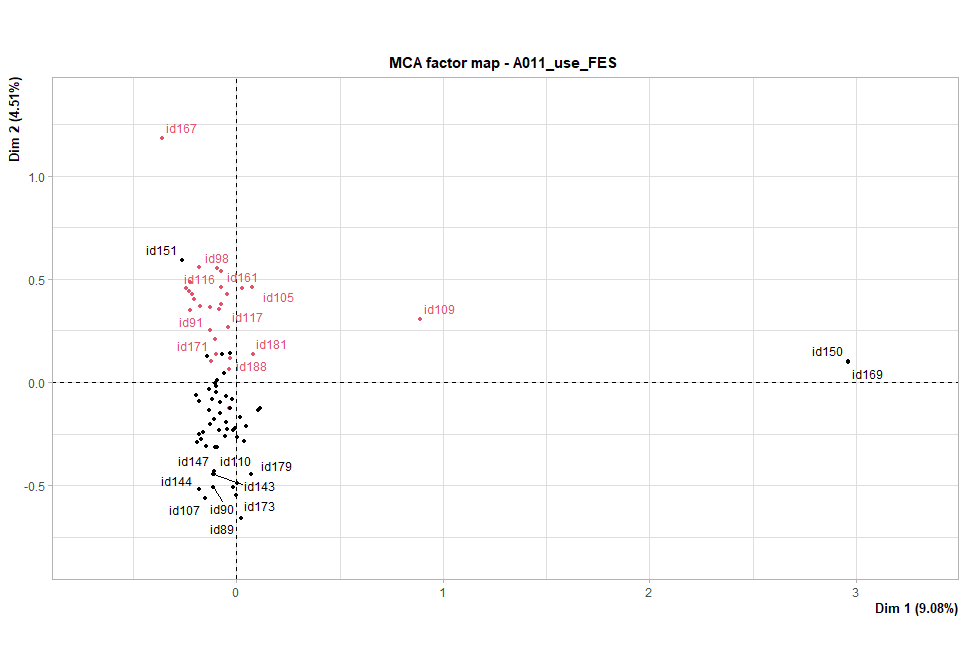
An online questionnaire was developed with the contribution of 9 professionals from a clinical and engineering multidisciplinary research team. In a small pilot study, a pre-test was performed with 10 participants to ensure relevance and validate the questions. The survey was distributed in France and Brazil from July/2021 to June/2022 and received responses from 215 potential users. 110 questionnaires were carried out in France, 101 in Brazil and 4 in other countries. 84 were returned from the patients’ group and 131 from the healthcare professional’s group. The results are currently being analyzed with the support of a statistics team, and there are preliminary results. Fig. 11 shows the first two dimensions of the MCA (Multiple correspondence analysis) between participants that had and had not previously used FES. This project was approved by the Research Ethics Committee of the Federal University of Minas Gerais (CAAE Registry: 22207213.5.0000.5149).
8.3.2 Hybrid neuroprosthesis for rehabiliation in post-stroke hemiplegia
Participants: Fernanda Ferreira, Lucas Fonseca, Christine Azevedo.
A novel hybrid robotic solution that may assist the upper limb rehabilitation of individuals with post-stroke hemiparesis was developed in partnership with the Bioengineering Laboratory (Labbio) at the Federal University of Minas Gerais (UFMG). An enhancement of an existing portable robotic exoskeleton called Pinotti Portable Robotic Exoskeleton (PPRE) 14 was achieved by adding functional electrical stimulation (FES) to the drive system. The addition of the FES increased the number of movements, allowing the execution of other types of grasps, and expanding the repertoire of possible activities. In addition, the simplification of the mechanical structure provided a reduction in volume and weight. Consequently, the device showed greater portability and the possibility of domestic use. Fig. 12 shows the current version of the device.

A preliminary performance assessment was conducted on two healthy participants through a test bench. Both successfully performed reach and grasp activities with various objects 28, 27. Tests have been carried out on 5 individuals with upper limb motor impairment due to the stroke. The functionality, ease of installation and operation, fatigue, satisfaction, and usability with the device are being evaluated through 3 sessions performing palmar grasp tasks. This project was approved by the Research Ethics Committee of the Federal University of Minas Gerais (CAAE Registry: 22207213.5.0000.5149).
8.3.3 Systematic review on upper limb hybrid neuroprostheses for rehabilitation of neurological disorders
Participants: Fernanda Ferreira, Lucas Fonseca, Christine Azevedo.
Previous studies have investigated the effects of Hybrid Motor Neuroprosthesis (HMN) in lower limb motor and functional recovery. However, the effectiveness of HMN on upper limb recovery is still unclear. Although previous reviews exist in this area (DUNKELBERGER, 2020; RESQUÍN et al., 2016; STEWART et al., 2017), the literature has not been systematically collated. In addition, the upper limb reviews focus only on post-stroke patients, individuals after spinal cord injury and hybrid exoskeletal devices. Therefore, this project systematically investigates the effects of HMN on upper limb recovery from central injuries. Furthermore, to the best of our knowledge, this is the first systematic review that includes only randomized controlled trials (RCTs) to consolidate high-level evidence of the effectiveness of hybrid motor neuroprosthesis. (PROSPERO: CRD42021227548) 36. This study will contribute to the development of new hybrid neuroprostheses that are proven to be effective for upper limb rehabilitation.
The search for relevant studies was conducted on PEDro, EMBASE, MEDLINE, CINAHL, Cochrane, AMED, IEEE Xplorer and Science. The methodological quality of the included studies was assessed using the 0-10 PEDro scale, and effect estimates were reported using standardized mean differences (SMDs) with 95% confidence intervals (CIs). In addition, the certainty of the current evidence was assessed using the GRADE. From 13.209 analyzed articles, 25 randomized controlled studies involving 796 participants were included. This systematic review is currently underway, and the results are being investigated.
8.3.4 Grasphyb: an assistive hybrid orthosis for upper limb function
Participants: Clément Trotobas, Christine Azevedo, Fernanda Rodrigues Ferreira Lopes, Andrew Murray [DimLab, Dayton (Ohio), USA], Henrique Resende Martins [UFMG, Belo Horinzonte, Brazil/Associate team CACAO], Roger Pissard-Gibollet [SED Grenoble].
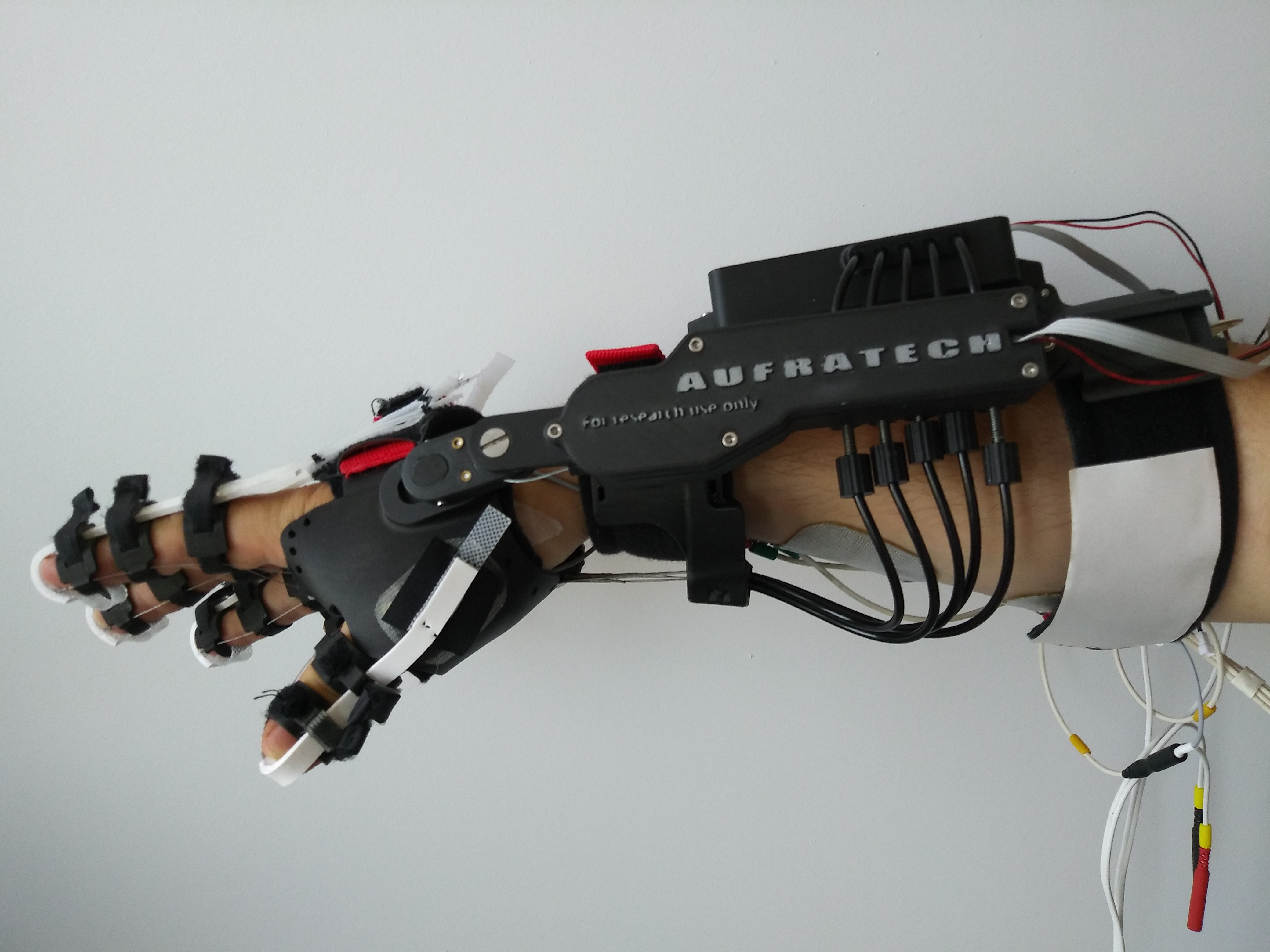
The goal of this project is to give functional mobility to paralyzed hand and wrist in order to hold an object in palmar grasp despite an upper-limb paralysis. The developed device is an hybrid orthosis composed of a mechanical orthosis and an electrical stimulator. The wrist and finger movements are generated by muscle contractions induced by functional electrical stimulation (FES) while the guiding and locking are mechanical. This locking should limit early muscle fatigue while maintaining the grip.
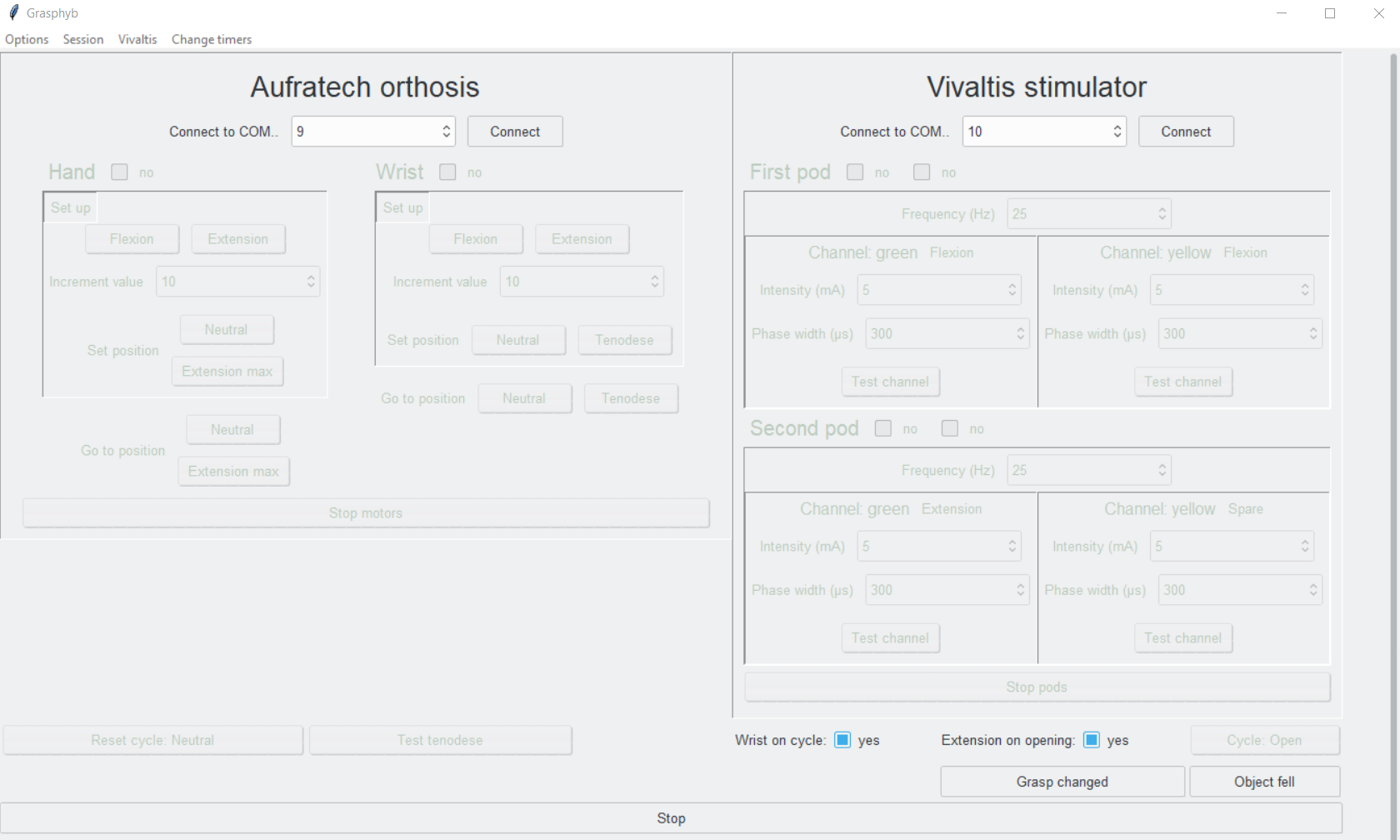
The mechanical orthosis was developed by the startup Aufratech based on CAMIN team specifications. It includes two DC motors, one for extension and flexion of the wrist, and one for all fingers (fig. 13). It is a cable driven orthosis meaning that motors pull or release cables, moving the limbs. The electrical stimulator (Vivaltis Phenix) was selected for its portability. A Python API was developed and a Graphical User Interface (GUI) implemented. It includes both orthosis and stimulator setup and control (fig. 14). The controller is based on a state-machine controlling the orthosis or the stimulator alone or both together, according to selected settings. It features 3 states: neutral, open and close. Events are handled by the Python software. A push button has been developed for the participant to trigger the change of state.
In order to validate the controller functioning and the consistency and feasibility between the developed setup and the designed protocol, an experimentation has been done including 5 healthy participants (COERLE) 29. Based on this validation, we designed an experimentation protocol with participants with upper-limb paralysis to evaluate the use of the hybrid orthosis in order to reduce muscle fatigue during assisted grasping compared to FES assistance only. The protocol was validated by the Ethics Committee of the Federal University of Minas Gerais (UMFG) (CAAE Registry: 53757521.3.0000.5149). The recruitment phase is done and experimentations are on going at UFMG, Belo Horinzonte, Brazil.

8.4 Brain Potentials Evoked by Direct Electrical Stimulation for on-line guidance of Neurosurgery: a combined simulation and experimental approach
Participants: Clotilde Turpin, Felix Schlosser-Perrin, Olivier Rossel, Emmanuel Mandonnet [AP-HP, France], Hugues Duffau [CHU-Montpellier, France], Riki Matsumoto, François Bonnetblanc.
8.4.1 Cortical hot spots vs. neighboring activity after direct electrical stimulation of white matter tracts during brain tumor surgery
During brain tumor surgery, the measurement of axono‑cortical evoked potentials (ACEP) seems to be a promising new tool in the arsenal of intraoperative neural monitoring to guide the surgical gesture and to refine the exploration of the neural connectivity. Indeed, by electrically stimulating the white matter fascicles in the resection cavity and recording the response evoked at the cortical level, it is possible to determine whether the two sites are connected to each other. However, it remains difficult to know whether the activity recorded by cortical grids has been generated by the terminations of the stimulated tract or by some other spurious phenomena. Therefore, it seems important to identify some criteria that would warrant a direct neurophysiological connection between a recording contact and a stimulated pathway. By recording ACEP in seven patients, we identified a very early positive (or negative) evoked response just after the stimulation artefact (, ) which was followed by an early and large negative (or positive) monophasic evoked response (; ) (fig. 15). This evoked activity was well differentiated from the neighboring activity. Under the stimulation conditions used, these observations suggest that it could be possible to distinguish the ‘hottest’ spot from the neighboring activity. The electrogenesis of the ACEP at the hot-spot is discussed, while the electrogenesis of the surrounding activity remains hypothetical.
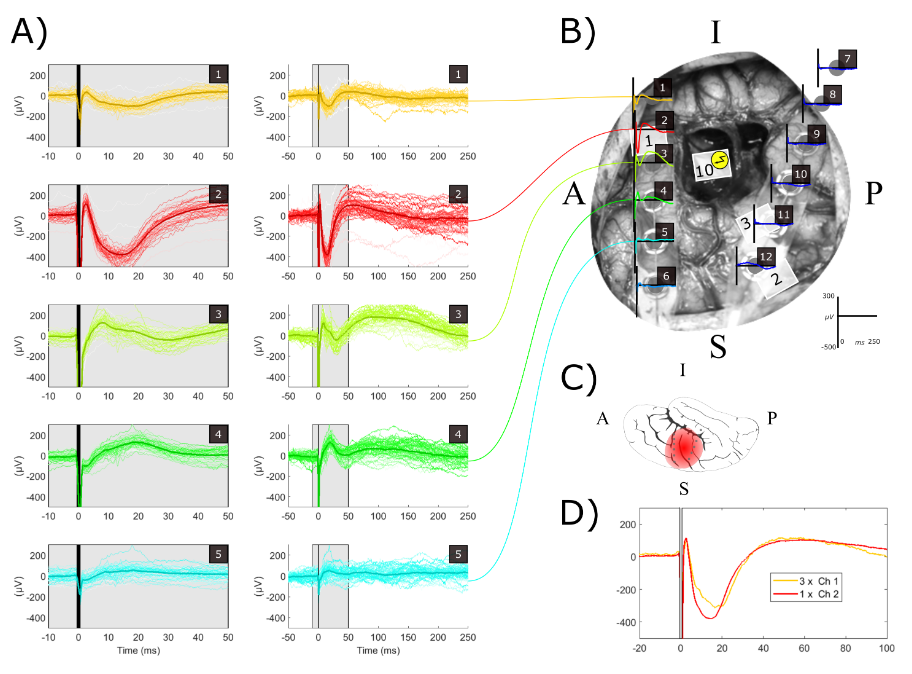
The DES applied (f=1Hzf=1 Hz, I=3mAI=3 mA, PW=0.5msPW=0.5 ms) in the anterior wall of the resection cavity (fibers of the operculum converging towards functional site 1) induced different waveforms of ACEP: (i) a very early positive 2.6ms2.6 ms component (Amplitude>100μVAmplitude > 100 \mu V) followed by a 14.8ms14.8 ms and large negative evoked response (Amplitude>300μVAmplitude > 300 \mu V) was observed on contact 2 with an immediate small after positivity, (ii) an early (17ms17 ms) but attenuated response on contact 1, which is suspected to be a remote capture (through passive volume conduction) of the response evoked near contact 2 (as shown in the subfigure D in which the ACEP in ECoG 1 is equivalent to the ACEP in ECoG 2 up to a scale factor equal to 3), (iii) a double positive potential, with an early (8.48.4 and 19ms19 ms) but attenuated response and a late component (95ms95 ms) whose amplitude was also inferior to 200μV200 \mu V on contact 3 and 4 (with an attenuation of the late component for this later contact). Interestingly, for contacts 3 and 4, the very early component occurring before 5ms5 ms was not observed.
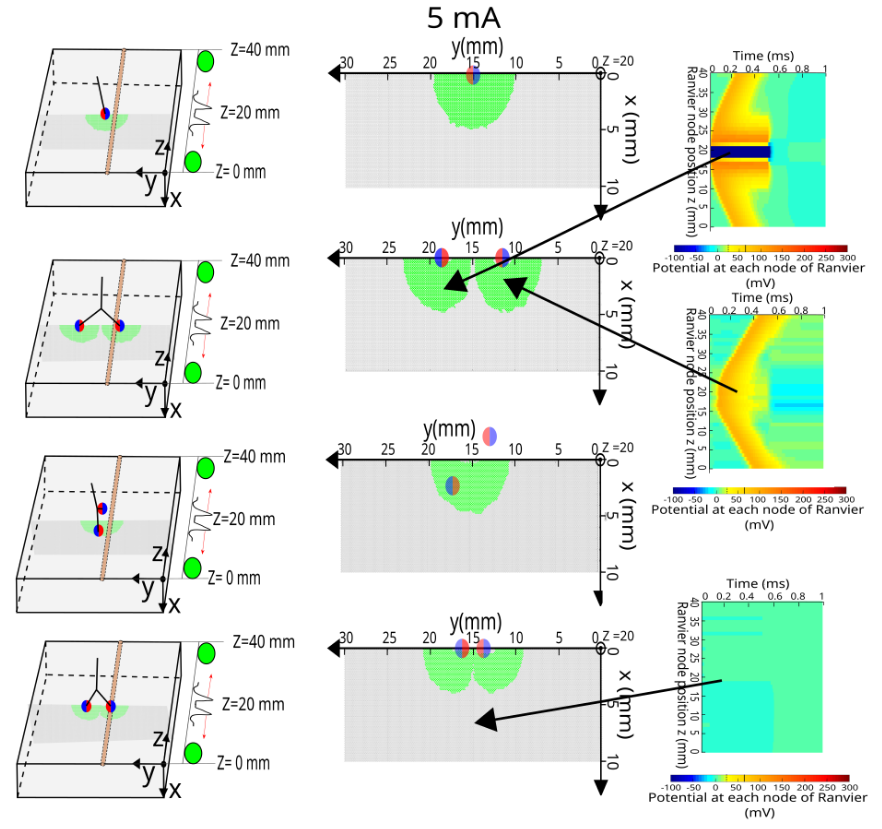
8.4.2 How far does electrical stimulation activate white matter tracts? A computational modeling study.
For brain neurosurgery guided by direct electrical stimulation (DES), there is a common belief that a monopolar stimulation probe induces a larger activated area, rooted in the idea that the simple pattern of electric field lines should inform us about where neuronal activation occurs. By contrast, our objective was to use computational modeling to investigate the effects of various parameters of DES (intensity, pulse waveform, type of electrode tips, bipolar probe orientation) on the extent of activated brain tissue. A two-steps computational model was applied: first, electrical potentials generated by stimulating electrodes were obtained by solving Laplace equations; then the temporal evolution of membrane potentials at each nodes of Ranvier of each axon was computed by solving the coupled system of differential equations describing membrane dynamics and cable propagation. Resulting activation maps represent activated and inactivated axons and the spatio-temporal propagation of action potentials (AP) (fig. 16) in these axons. These maps can be analyzed for different DES parameters in order to optimize the strategy when DES is used to guide the neurosurgical gesture and to tract the brain connectivity on-line.
8.4.3 Tripolar manual probe for new recordings of Brain Potentials Evoked by DES: a proof of concept
The recording of evoked potentials is classically performed with fixed electrocorticographic (ECoG) strips. The use of a manual tripolar probe could admit performing new types and more accurate recordings thanks to the maneuverability, the smaller diameters of the contacts and the potential differential measurements between them. This very beginning project tries to validate the measurements of new types of evoked potentials as axono-axonal evoked potentials (AAEP: stimulation and recordings are performed on the same tract) as well as reproducing with a greater spatial resolution the recording of classical evoked potentials measured with ECoG (e.g. Direct Cortical Response, Axono-Cortical Evoked Potentials and Cortico-Cortical Evoked Potentials), see (fig. 17). Interpretations of responses are still hypothetical and require well-defined protocols to be further validated and to optimize this type of electrophysiological recording during brain surgery. However, it is already possible to record significant electrophysiological activity using manual (tripolar) probes see (fig. 17).
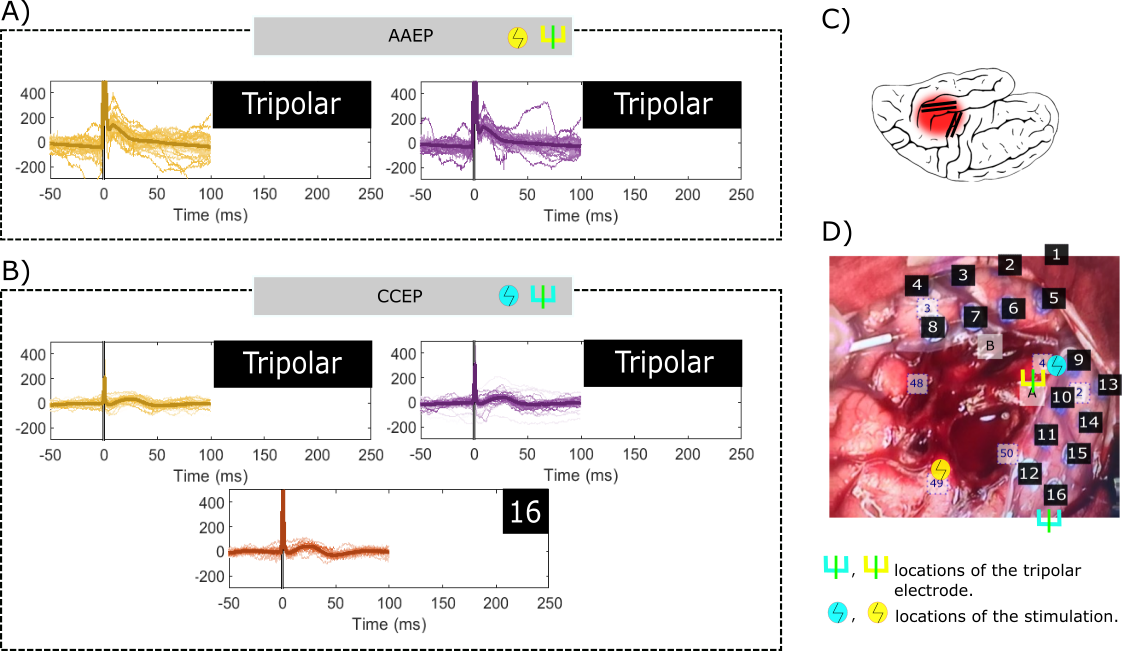
AAEP and CCEP obtain with a stimulations applied (f=9Hzf=9 Hz, I=2.5mAI=2.5 mA, PW=1msPW=1 ms) in and outside of the cavity. A) possible AAEP with a large early component representing the spatio-temporal summation of AP passing through the stimulated white matter pathway; B) possible CCEP with an electrophysiological activity captured remotely from the DES site. This "remote" response is identical in Ecog 16 and tripolar electrodes; C) Location of the electrode strip in the brain ; D) Location of the Ecog close to the cavity.
8.5 Spinal cord stimulation (SCS) for rehabilitation of bladder, bowel and sexual functions in spinal cord injury
Participants: Thomas Guiho, Yohann Wurbel, Jean-Luc Boulland [Oslo University], Christine Azevedo Coste, David Guiraud.
Spinal cord injuries have disastrous consequences for individuals, who, in addition to the motor impairments, must deal with sexual, bowel and urinary problems. Beyond their impact on health, these disorders have psychosocial implications that must not be neglected. Regarding lower urinary tract (LUT) function, SCI induces a communication breakdown between supraspinal and spinal levels that not only manifests by the loss of voluntary control of micturition but also by an exacerbation of reflex processes. Adult neurogenic lower urinary tract dysfunction refers to the urological symptoms associated with these disturbances and expresses clinically by two major problems: the disruption of the detrusor activity (i.e. smooth muscle found in the wall of the bladder: detrusor overactivity – DO, or detrusor underactivity – DU) and the detrusor sphincter dyssynergia (DSD).
Pig experiment campaign in Oslo
This work aimed at investigating various techniques for spinal cord electrical stimulation in order to address dysfunctions in spinal cord injured individuals on lesion levels that have an impact on lower limb movements and bladder, bowel and sexual functions. Orderly recruitment of fibers at the spinal cord level should eventually lead to orderly recruitment of the detrusor muscle without activation of the bladder sphincter. Thereby, low pressure voiding, for example, should be obtained but is currently impossible with existing active implantable medical devices. A first state of the art refined the scientific positioning of our experiments but also specified the needs of individuals with SCI in terms of rehabilitation (work published in World Neurosurgery in 2021 32). In the direct continuity of this work, two spinal cord stimulation sessions were implemented in Oslo in December 2021 on large animals (pigs around 30-45 kg, fig.18).
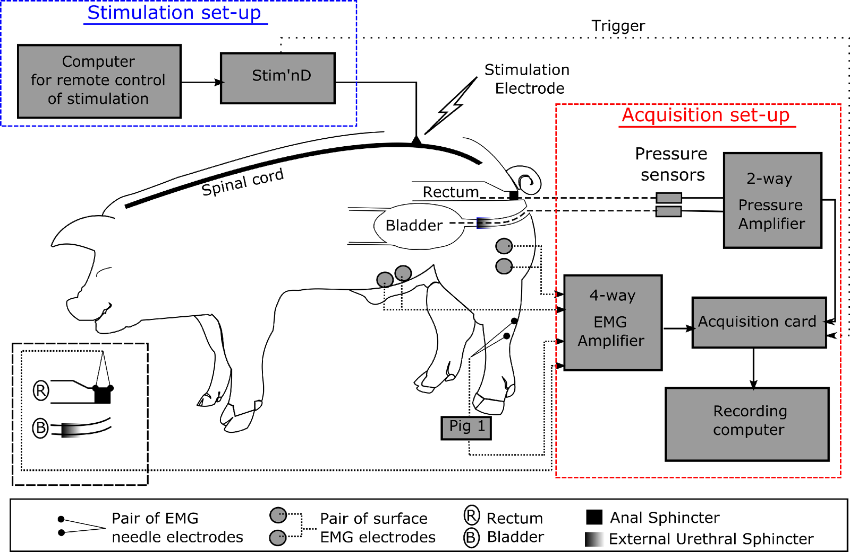
A dedicated software platform, developed in partnership with the startup Neurinnov, enabled automated investigation of stimulation parameters on numerous electrodes – in terms of stimulation intensity and frequency but also in terms of complex 3D current – in order i) to generate functional responses of the lower urinary and/or intestinal tract and ii) to identify the spinal cord neural networks responsible for the management and control of these vegetative functions through the study of the muscular responses directly evoked by stimulation. The processing of these data highlighted a parallel between upper limb and urinary muscles’ dynamics of activation following direct stimulation of the spinal cord – and more particularly after analysis of the early responses induced by the first few pulses of the stimulation train; but also demonstrated strong electrophysiological and structural similarities between the spinal cord of humans, monkeys (work carried out in 2021 in partnership with Newcastle University) and pigs.
8.6 Movement analysis, detection and modelling
8.6.1 User intent decoding from residual muscle activity
Participants: Thekla Stefanou, David Guiraud, Charles Fattal, Christine Azevedo, Lucas Fonseca.
Users of assistive devices, particularly those with upper limb disabilities, often have difficulties controlling their own orthoses. Intention recognition is then paramount for this population. This project focuses on decoding user intention based on residual muscle activity using electromyography (EMG).
Using a single EMG sensor, we were able to train a white-box supervised algorithm to identify different shoulder functional activities in able body subjects with 94% accuracy. A specific shoulder movement (shoulder raise), could by classified with 99% accuracy. These activities can then be used to trigger commands in an assistive device. Fig. 19 summarizes how the system works.
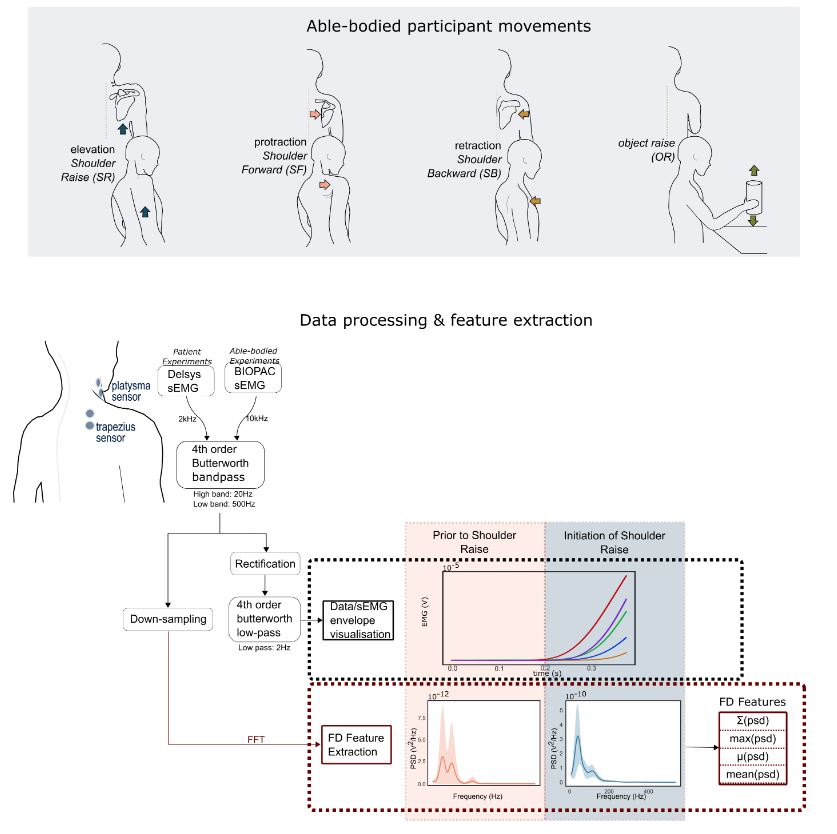
This is a robust intention recognition system that uses a novel frequency-domain method to classify surface EMG signals with great accuracy. These results were published in a journal paper 18.
8.6.2 Monitoring tremor in ecological conditions : PARaKeet
Participants: Ronan Le Guillou [CHU Toulouse], Christine Azevedo, Christian Geny [CHU Montpellier, France], Valérie Driss [CHU Montpellier, France].
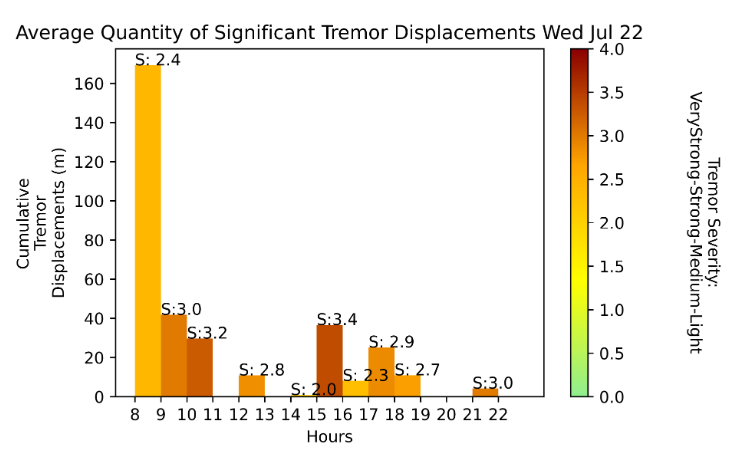
As part of a preliminary study on the effects of Mindfulness meditation on participants with Parkinson’s Disease (PD) (LABEX NUMEV - MEDITAPARK), an application was developed to monitor at home tremor occurrence using a smartwatch Samsung Gear S3 and its newer model, the Samsung Galaxy Watch (fig.20). A Python program has been developed to process and format the recorded data, extract specific features and present the characteristics of the Parkinson tremors under a user friendly and comprehensible format for clinicians. This was finalized last year through a comprehensive rewriting where precision and accuracy of data processing was improved. Furthermore, the ease of use of the automatized data processing and the automatic generation of reports on the patient's detected tremors were completed and improved upon, compared to the previous versions. The goal of this system being to identify Parkinson’s tremors characteristics qualitatively and quantitatively to highlight global tendencies and help objectively determine effectiveness of diverse treatments against PD tremors. This system was tested again and validated through visual confirmation using acquired tremor data coupled to videos of the watch on a volunteering participant. The different levels of tremor severity were calibrated through data/video comparison with the clinical assessment provided by Dr. Christian Geny.
A one day sample of acquisition is presented in a hourly format displaying the evaluation of the quantity of displacement generated by parkinson tremors during each hour as well as the average severity estimation of the related tremors (fig.21). The created system allows the qualification of tremors in punctual clinical check-ups in the Hospital as well as quantitative formatting of daily tendencies. This system should now allow to highlight the evolution of several characteristics from Parkinson’s tremors throughout the MBSR (Mind-fullness Based Stress Reduction) meditation program which started in November 2021 and continued throughout the first half of 2022. This clinical protocol aims to evaluate the impact of Mind-fulness Based Stress Reduction on PD tremors. Acquisition of the data pre and post MBSR program was concluded successfully for both planned sessions of the protocol bringing the total of participants having completed the protocol to 16. The ClinicalTrial.gov ID of this protocol is : NCT05168046. The software APP of this platform can be found at https://bil.inria.fr/fr/software/view/3565/tab as the PARa-Keet Project with the Bil Id: Software_3565.

8.6.3 Grasping intention detection
Participants: Etienne Moullet, Christine Azevedo, François Bailly, Justin Carpentier [INRIA WILLOW].
Currently available controle modes for the AGILIS system require the user to interact with a computer (via EMG, IMU or voice activation) in order to select the desired hand grip among a list of feasible ones. The grip is then generated via the appropriate stimulation patterns. Such interfaces may represent too heavy a cognitive load for recurrent daily life gesture like grasping objects. We propose to automate the grip selection phase via grasping intention detection.
We exploit recent progress in computer vision to recover the necessary inputs from RGB cameras. We achieve online reconstruction of the user's hand pose using MediaPipe 37, an efficient and open sourced machine learning solution for real-time hand tracking. Inspired from previous works 35, we aim to improve and filter the pose's evolution in time with optimal estimation of its motion by comparison to simulation of the hand's dynamics using the Pinocchio software 31.
The pose and shape of objects candidates to grasping is extracted using CosyPose 33, a machine-learning solution that requires to be trained with a prior on the shape of expected objects. A more general solution, MegaPose 34, expecting the shape of the objects as an input rather than as training data, will be used in the future.
With this data stream as inputs, an online kinematic analysis of the hand's movement allows the targeted object to be identified and the time before impact to be estimated. The appropriate grip is then selected according to the expected angle and point of impact between the hand and the object. Experiments will be run to evaluate this approach and to compare the performances of monocular and stereo visions.
8.7 Towards new designs for assistive devices
8.7.1 Active knee orthosis for rehabilitation
Participants: Laurence Colas [REEV], Christine Azevedo, François Bailly.
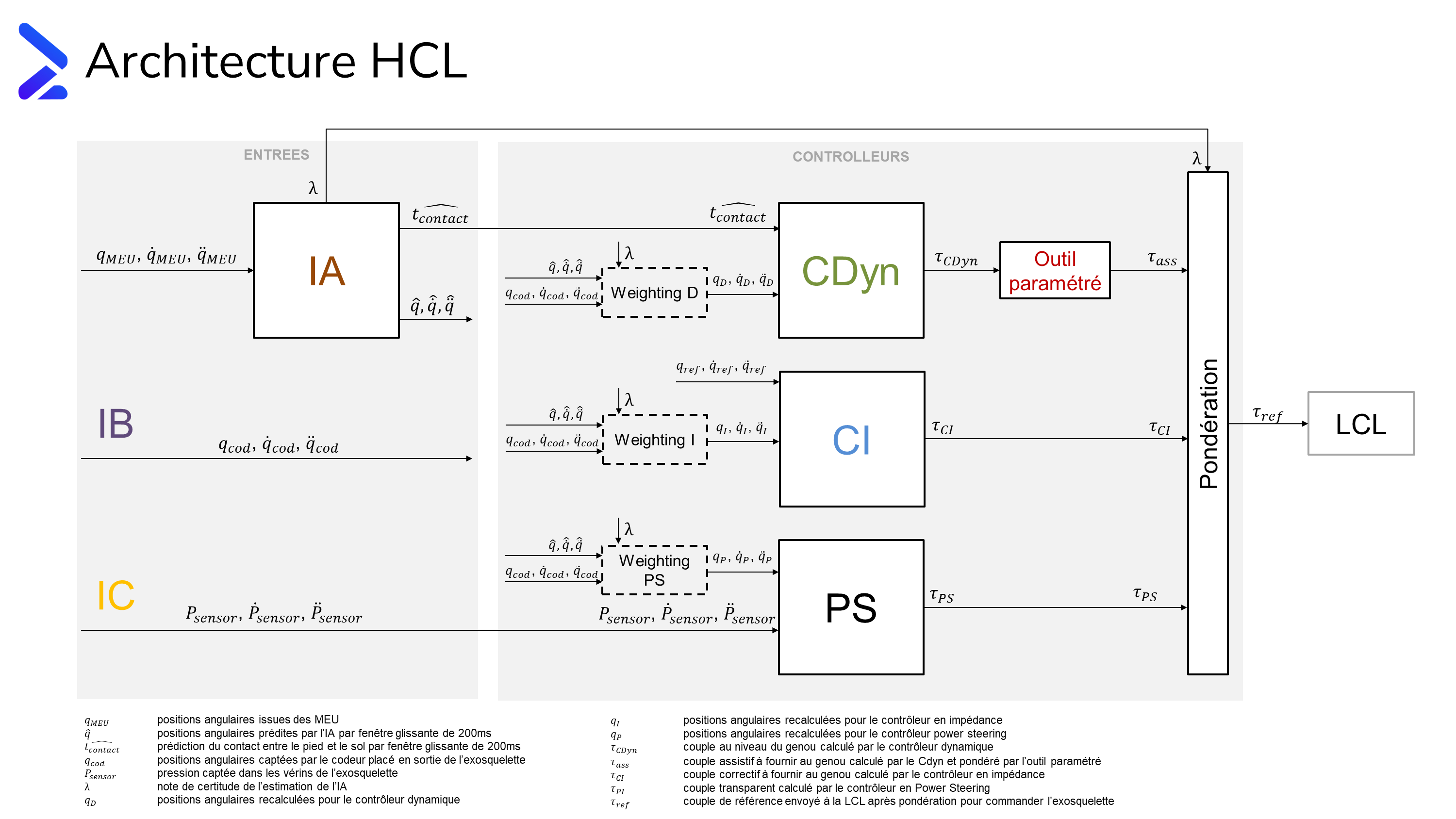
The project started in September 2022 in the form of a PhD thesis in collaboration with the REEV company, on the design and control of a walking assistance exoskeleton at the knee. The particularity of REEV's device comes from its ability to work in concentric and eccentric modes both during flexion and extension. This is allowed thanks to its optimized hydraulic actuators.
A bibliographic survey was carried out to establish a state of the art of exoskeletons and their control strategies for human movement assistance. Following this work, we were able to define a first control architecture for the device. The envisionned controller takes as input a set of data from embedded sensors and pre-trained artificial intelligence (outside of the scope of the thesis) and outputs a reference torque to be tracked by the orthosis. This block contains 3 sub-controllers and several weighting blocks (Fig. 22).
The rest of the project consists in developing the sub-controller blocks independently before testing them individually and then nesting them to obtain our final controller. Then, it will be tested on healthy subjects before running clinical trials.
8.7.2 Novel design for a prono-supination orthosis
Participants: Clément Trotobas, Christine Azevedo, Andrew Murray [DimLab, Dayton (Ohio), USA].
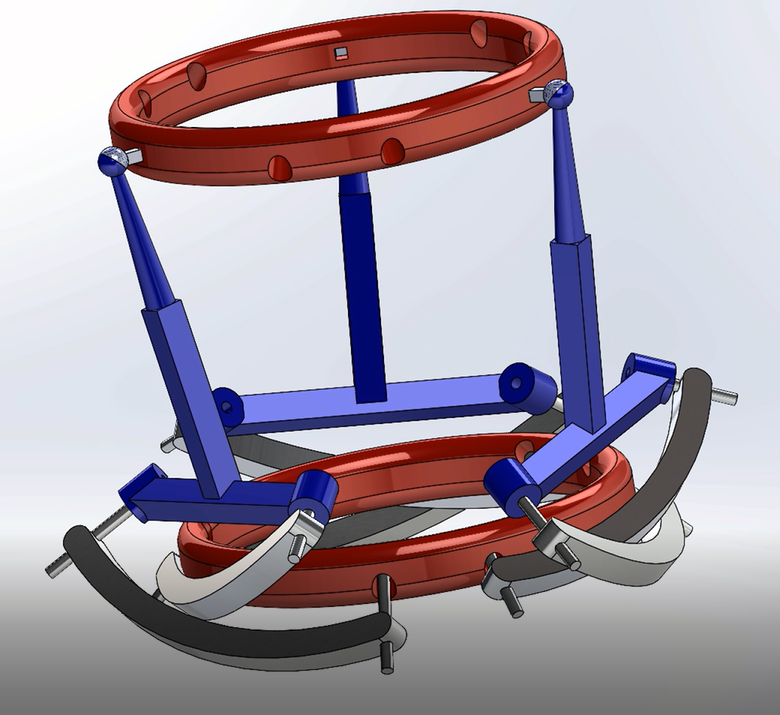
The goal of this project is to imagine a novel light and wearable orthotic solution for pronation and supination movement assistance. The objective is to give functional mobility to paralyzed forearms. The main complexity of this kind of device is to induce a rotational movement at the wrist according to the elbow without being inside the body space and with minimized spatial encumbrance.
Based on an optimization algorithm, a rigid-body 4-bar spherical mechanism was proposed. The outcome design is composed of a three 4-bar spherical mechanism connected to a top ring inducing a rotational movement of the wrist. Input parameters are the inner radius (space for the forearm) and the length. They define the range of motion of the rotation. A 3D model has been developed on Solidworks 23. Reaching a 160-degree rotation of a forearm requires stacking two layers of three mechanisms - the top ring of the first layer being the bottom ring of the second layer. This means a forearm orthosis would require 3 x 2 actuators which seems not compatible with a wearable device. This work was achieved during the stay of Andrew Murray as invited researche in the team (Labex Numev support).
8.7.3 Exofinger: simple thumb orthosis for key-grip assistance
Participants: Clément Trotobas, Marie Ghekiere, Christine Azevedo, Roger Pissard-Gibollet [SED Grenoble], Christophe Braillon [SED Grenoble], Laurence Boissieux, Benoit Sijobert.
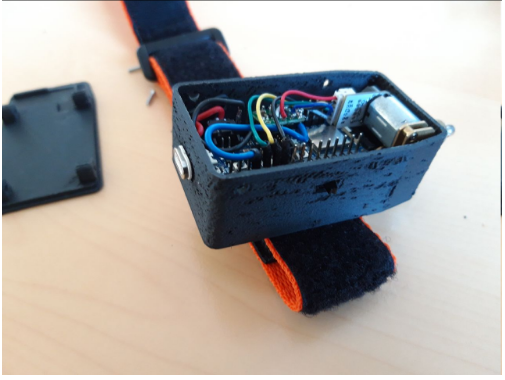
This work is done within the HumanLab Inria AeX (Action Exploratoire). Exofinger project was initiated in 2020 during an Hackaton organized by My Human Kit: Fabrikarium. The project aims to develop a thumb orthosis for a project holder with complete C6 tetraplegia. He can move his wrists in extension but does not have the use of his hands (his fingers are flexed spastic, except for the thumb). The project holder expressed the need to grasp objects in key-grip. The developed device is a cable driven orthosis featuring only thumb flexion. It is composed of an actuation unit with a control board featuring bluetooth low energy (BLE), batteries, DC motors coupled with coils to wind cables to move limbs and a glove. The actuation unit can be placed on the forearm with a strap, the output cable travels through a sheath to the glove up to the thumb. A 6-month internship has been conducted to develop a new version of the device. It now features: On/Off switch, magnetic plug to facilitate charging, new reduction ratio for more pulling strength, remote push button with BLE, Android Application to control the device in place of the button. Concerning the glove, a Python sewing pattern generator has been developed in order for the user to have a custom made glove. An open source documentation (available through https://project.inria.fr/humanlabinria/fr/exofinger/) was written and continues to be updated to allow access to as many people as possible. Eager to know if the device could benefit other persons we designed an experimental protocol accepted by the COERLE. Participants are currently being recruited through the HumanLab Saint-Pierre. The protocol consists of the evaluation of functional tasks and acceptability questionnaire according the device.

8.7.4 Opticycle: Optimally designed tricycle for FES-Induced pedaling in patients with Spinal Cord Injury
Participants: François Bailly, Andrew Murray [Dimlab, Dayton (Ohio), USA], Christine Azevedo.
The objective of the OPTICYCLE project is to improve the performance of FES assisted pedaling by co-optimizing the design of the tricycle and the FES control law, in accordance with the biomechanical capabilities of the patient. So far, we have conducted numerical optimization on the adjustable parameters of the tricycle using literature-derived surfaces of maximum joint torques varying with joint position and velocity 30. In simulation, this approach allows us to maximize the power recovered at the crank by changing the geometry of the tricycle, for an able-bodied rider, at constant speed. In a second step, we will generalize this approach to FES-stimulated patients (scaling of the torque surfaces) and we will co-optimize the FES control law. We aim to achieve the most efficient possible combination of tricycle and control law to delay the apparition of fatigue and let the patient ride the system for larger periods of time (aiming to attend the 2024 Cybathlon).
9 Bilateral contracts and grants with industry
NEURINNOV startup finances half of the PhD thesis salary of Lucie William.
10 Partnerships and cooperations
10.1 International initiatives
10.1.1 Inria associate team not involved in an IIL or an international program
BrEl-Mapping
-
Title:
Electrophysiological brain mapping
-
Duration:
2021 ->
-
Coordinator:
Riki Mastumoto (matsumot@med.kobe-u.ac.jp)
-
Partners:
- Kobe University Graduate School of Medicine (Japon)
-
Inria contact:
François Bonnetblanc
-
Summary:
Direct electrical stimulation of the brain (DES) helps to inhibit areas of the brain in order to perform anatomo-functional mapping. It is used successfully in clinical practice in the awake surgery of epileptogenic foci and infiltrating brain tumors. It identifies "non-functional" areas that can be resected. Its electrophysiological effects are still very poorly understood because of the complexity of the excited brain structures, and the stimulation modes used remain rudimentary. Understanding these mechanisms is crucial for (1) understanding the relationships between electrophysiology and function (2) neuromodulation of the brain and (3) at longer term for the development of neuroprosthetics for sensorimotor restoration. To better control the practice of DES and its utility in electrophysiological mapping, we will measure its electrophysiological effects through the action potentials (PA) and evoked local field potentials (PE). The clinical objectives are to improve the protocol of DES and the collection of its electrophysiological effects in the awake surgery of low-grade infiltrating gliomas but also for any other type of surgery of tumors practiced under general anesthesia to (1) develop electrodiagnostic approaches and tools that aim to determine the electrophysiological status in real time of neural tissues on and around the tumor and (2) to measure the structural connectivity in vivo and real-time in the peri-lesional area and in particular the subcortical areas to help objectify the boundaries of resection on the white matter bundles during the surgical procedure itself.
CACAO
-
Title:
Lower limb electrical stimulation for function restoration
-
Duration:
2019 ->
-
Coordinator:
FACHIN-MARTINS Emerson (efmartins@unb.br)
-
Partners:
- FACEPE Brasilia (Brésil)
-
Inria contact:
Christine Azevedo Coste
-
Summary:
The CACAO team has developed an expertise in the application of electrical stimulation for assisting seat-to-seat transfers and pedaling for people with paraplegia. The team shared a unique experience in 2016 by participating in the first Cybathlon techno-sports games with a Brazilian driver and a French driver in the assisted bicycle race. The team wishes to continue the work by optimizing the quality of pedaling to participate in the Cybathlon 2020 and extending the technique for the rehabilitation of patients with hemiplegia in a rehabilitation context.
10.1.2 Visits of international scientists
Andrew Murray, professor at Dayton University spent 8 months in the team (Labex NUMEV support).
10.1.3 Visits to international teams
Lucie William obtained a MITACS funding to spend 4 months in Professor José ZARIFFA's team in Toronto Rehab Institute (Canada).
10.1.4 H2020 projects
RESCUEGRAPH FLAG-ERA JTC(2021-23)
The RESCUEGRAPH project aims at using graphene-based flexible electrodes as the neu-ral interface of a FES system to reproduce and allow rehabilitation of gait and, at the sametime, to drive neuroplasticity at spinal and brain levels to enhance functional recovery of mo-tor and somatosensory processing after SCI. Partners: Universitat Autonoma de Barcelona(Spain), Fundacio Institut Catala de Nanociencia i Nanotecnologia (Spain), Bogazici Uni-versity (Turkey), Neurinnov (France)
Neuroprosthesis-UIH2020-MSCA-IF-2019(2020-22)
Lucas Fonseca has obtained a Marie Curie Grant for his project: "Neuroprosthesis userinterface based on residual motor skills and muscle activity in persons with upper limb disabilities".
10.2 National initiatives
ANR Grasp-It (2019-23)
Design and evaluation of a tangible and haptic BCI for upper limb rehabilitation after stroke. The project aims to recover upper limb control improving the kinesthetic motor imagery (KMI) generation of post-stroke patients using a tangible and haptic interface within a gamified Brain-Computer Interface (BCI) training environment.
ARC FOUNDATION for Research Against Cancer (2022-2025)
Guiding brain tumor surgery in real time using electrophysiology (collaboration with Pr Hugues Duffau and Pr Emmanuel Mandonnet). During the resection of brain tumors, the neuro-surgeon has substantial imaging data allowing him/her to plan his/her gesture upstream. However, during the actual surgical gesture, in real time, this imaging becomes ineffective due to the deformation of the brain (so called brain shift). It is then possible to use direct electrical stimulation of the brain in an awake patient who cooperates with the neurosurgeon to determine the functional areas and those which are not. When patients are under general anesthesia this possibility no longer exists. We have planned to use the electrophysiology evoked by the DES of the brain during brain surgery to diagnose and determine the location the tumor and the anatomical connectivity on-line in order to guide the surgery in awake patients or under general anesthesia. This needs to go beyond the proof of concept, we have alrealdy performed, and necessitates to address and solve some methodological challenges. At a fondamental level, this will also help to better understand the electrophysiological effect of DES in order to optimize its use.
BAYFRANCE (France Bavaria) (2022-2023)
Collaboration and exchange with Pr Andréa Szélenyi, Munich Hospital on the theme of brain evoked potentials and their use in Neurosurgery.
LABEX NUMEV thesis co-funding (2021-2024)
Additional funding through an agree-ment with the APHP (Paris) and Pr Emmanuel Mandonnet. Felix Schlosser-Perrin thesis.
AGILISTIMI-SITE MUSE grant - Soutien a la recherche (2021-23)
AGILISTIM proposes to implant 3 epineural electrodes around the median, radial and ulnar nerves, just above the elbow of volunteer participants with complete tetraplegia for 30days. The multi-contact neural stimulation will synergistically activate the forearm muscles to trigger: hand opening, a digito-palmar grip or a functional terminal grip. The project must consolidate and extend the scientific results of the previous work and the innovative technologies which result from it. It should allow to reach a crucial proof-of-concept stage before the development of a unique finalized product responding to an unsolved need in order to improve the quality of life and the autonomy of the users.
OrthybLabex Numev (2022)
Visiting researcher grant (Andrew Murray Dayton University) + small equipment to develop an hybrid orthosis for elbow movements assistance.
Human Lab Inria (HLI) (2021-24)
Exploratory Research Action 28ke
11 Dissemination
11.1 Promoting scientific activities
11.1.1 Scientific events: organisation
- Workshop BCI - Juin 2022 François Bonnetblanc with Prof. Riki Matsumoto from Kobe and Inria Franco-Japanese associated team. As part of this associated team, we have organized a workshop held in Montpellier on June 9 and 10. This workshop has brought together around fifty people,including clinicians and researchers. The audience was international. In addition to our Japanese colleagues involved in the associated team, it included Italian, Swedish and German colleagues, and two American ones from the prestigious Mayo Clinic in Rochester. The program is visible on the website of the workshop. Brain evoked potentials in the context of Neurosurgery
- Christine Azevedo was member of the organizing committee of IFESS at RehabWeek 2022 (Netherlands).
11.1.2 Journal
Member of the editorial boards
- David Guiraud is Editor of Theme 6 (Neurorahabilitation) at IEEE EMBC conference.
- David Guiraud is member of the Editorial Board of Journal of Neural Engineering (JNE) andMedical and Biological Engineering and Computing (MBEC), Frontiers in Physiology (Modelling).
- Christine Azevedo is member of IFESS society board.
- Christine Azevedo is member of ERCIM News’ Editorial Board as Inria representant, member of editorial boards of Frontiers in Neurology and Frontiers in Neuroscience and associate editor for IEEE RA-L and IEEE EMBC (Theme 6).
- Christine Azevedo and Lucas Fonseca are Guest Editors in Sensors Special Issue "Sensors for Artificial Movement Control".
11.1.3 Invited talks
- Christine Azevedo, Charles Fattal and David Guiraud were invited to present AGILIS project during a webinar organized by IFESS society
- François Bailly was invited to present the team's activity during les journées scientifiques INRIA 2022
- François Bailly was invited to hold a workshop on the Bioptim software during the 47ème congrès de la société de biomécanique
11.1.4 Research administration
- Thomas Guiho is responsible for the “Neuroprostheses” teaching unit. This unit is an option common to all the masters of the ICT for health training package.
- Thomas Guiho is part of the pool of session secretaries for the Sophia Antipolis project-team committees since September 2022.
- Christine Azevedo is a member of COERLE (Inria Comité d’éthique)
- Christine Azevedo was a member of NICE committee, a subgroup of Sophia team projects committee (CEP)
- Christine Azevedo is a member of projects committee office (BCEP)
- Christine Azevedo and Roger Pissard-Gibollet (SED Grenoble) coordinate the HumanLab Inria action https://project.inria.fr/humanlabinria/.
11.2 Teaching - Supervision - Juries
11.2.1 Teaching
- Master ICT for Health, Neuroprostheses option: Thomas Guiho, “Neuroanatomy and Neurophysiology”, 6h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Ronan Le Guillou, “Control basics and signal processing”, 16.5h, M1 and M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Olivier Rossel, “Signal processing and experimental set-up”, 7.5h, M1 and M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Felix Schlosser-Perrin, “Electrophysiological mapping during awake brain surgery”, 7.5h, M1 and M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Lucas Fonseca, “Signal processing of neural signals”, 3h, M2, Montpellier University, France
11.2.2 Supervision
- PhD in progress : Lucie William, "Selective implanted neural stimulation to recover the prehension for quadriplegic", University of Montpellier-Inria-NEURINNOV, october 2019-June 2023, supervised by David Guiraud and Christine Azevedo
- PhD in progress : Clément Trotobas, "Design of arm assistive technologies", University of Montpellier-Inria-Dayton University, september 2020-september 2023, supervised by Christine Azevedo and Andrew Murray (Dayton Univ)
- PhD in progress : Ronan Le Guillou, "Design of a wearable neuroprosthetic solution for arm rehabilitation in post-stroke hemiplegia", University of Montpellier-Inria-CHU Toulouse, December 2020-December 2023, supervised by Christine Azevedo and David Gasq (CHU Toulouse)
- PhD in progress : Félix Schlosser-Perrin, "Modélisation des effets électrophysiologiques de la stimulation électrique sur le cerveau et preuves expérimentales en chirurgie des tumeurs cérébrales : variation de l’intensité, de la distance inter-électrode et de la largeur du pulse de stimulation", University of Montpellier, september 2021-september 2024, supervised by François Bonnetblanc and Emmanuel Mandonnet (PU-PH in Neurosurgery at APHP)
- PhD in progress : Laurence Colas (2022-...) Développement, contrôle et validation d’un système mécatronique pour orthèse d’assistance des membres inférieurs. Thèse CIFRE - société REEV. Supervised by François Bailly and Christine Azevedo.
11.2.3 Juries
- Christine Azevedo participated in Jordan Nowak PhD thesis defense in June 2022 «Contribution to the control strategy of a mobile two-armed manipulator for interactive object manipulation: application to the assistance of elderly people.» University of Montpellier, France.
- Christine Azevedo participated in Guillaume Gourmelen PhD thesis defense in November 2022 «Embodied robotic system: control and learning for skill transfer from humans.» University of Montpellier, France.
- Christine Azevedo participated in Sabrina Otmani PhD thesis defense in December 2022 «A study of spasticity modeling and patient-exoskeleton interaction in pediatric cerebral palsy.» University of Toulouse, France.
- Christine Azevedo participated in Clémentine Coulomer PhD thesis defense in December 2022 «Information exchange and role emergence during interpersonal haptic interactions.» University of Montpellier, France.
11.3 Popularization
11.3.1 Articles and contents
Several articles and videos have been prepared with INRIA Communication Service.
-
AGILIS
TF1 - Tetraplegiques, ils retrouvent l'usage de leurs mains : une premiere porteuse d'espoir
Restaurer le mouvement par la neurostimulation: objectif atteint pour le projet Agilis phase deux
ERCIM News - Restoring grasping functions of Paralysed Hands
Faire bouger un bras paralysé: La youtoubeuse Amy Plant a rencontré l'équipe CAMIN
-
Human Lab Inria
exofinger: la recherche et le développement technologique au service du handicap
ERCIM News - Humanlab : Innovating for and with end-users with disabilities
11.3.2 Interventions
Christine Azevedo and Clément Trotobas participated in Robotic Days organized by Agde High School in April 2022. https://www.ville-agde.fr/agenda/economie/agenda/5eme-journee-de-la-robotique-et-des-drones-2022
Christine Azevedo was mentor of a SAVANTURIERS project in a school were she followed up a research project about animal communication. 14 sessions of an average of 4 hours were organized. https://savanturiers-projects.learningplanetinstitute.org/projects/Bon88412
Christine Azevedo gave introduction to programming interventions using Thymio Robot in Collège Léon Cordas (4 sessions of 1,5 hour).
Christine Azevedo and Lucas Fonseca presented the team and AGILIS work to a class of high school students in Perpignan.
Christine Azevedo, Jérémy Blanquinque, Sam Durand and Clément Trotobas participated in Fokus hackaton in June 2022 for HumanLab INRIA, in Montbonnot.
Andrew Murray participated in Fabrikarium hackaton in october 2022 for HumanLab INRIA, in Rennes on the project telescopince.
Clément Trotobas participated into "Ma thèse en 180s" event and ranked 2nd position at the regional level.
CAMIN team welcomed 1 week internships of 4 schoolchildren this year (4e, Leon Cordas secondary school - Montpellier)
12 Scientific production
12.1 Major publications
- 1 articleActivating effective functional hand movements in individuals with complete tetraplegia through neural stimulation.Scientific Reports121December 2022, 16189
- 2 articleElectrophysiological Mapping During Brain Tumor Surgery: Recording Cortical Potentials Evoked Locally, Subcortically and Remotely by Electrical Stimulation to Assess the Brain Connectivity On-line.Brain Topography: a Journal of Cerebral Function and Dynamics2020
- 3 articleTraining with FES-assisted cycling in a subject with spinal cord injury: Psychological, physical and physiological considerations.Journal of Spinal Cord MedicineJuly 2018, 1-12
- 4 articleImpact of direct epispinal stimulation on bladder and bowel functions in pigs: A feasibility study.Neurourology and Urodynamics371January 2018, 138-147
- 5 articleSensory feedback restoration in leg amputees improves walking speed, metabolic cost and phantom pain.Nature Medicine259September 2019, 1356-1363
- 6 articleEnhancing functional abilities and cognitive integration of the lower limb prosthesis.Science Translational Medicine11512October 2019
- 7 articleA novel EMG interface for individuals with tetraplegia to pilot robot hand grasping.IEEE Transactions on Neural Systems and Rehabilitation Engineering2622018, 291-298
- 8 articleCase report: remote neuromodulation with direct electrical stimulation of the brain, as evidenced by intra-operative EEG recordings during wide-awake neurosurgery.Clinical NeurophysiologyLetter to the editorNovember 2015, 1752-1754
12.2 Publications of the year
International journals
International peer-reviewed conferences
Conferences without proceedings
Other scientific publications
12.3 Cited publications
- 30 articleMaximum voluntary joint torque as a function of joint angle and angular velocity: model development and application to the lower limb.Journal of Biomechanics40142007, 3105--3113
- 31 inproceedingsThe Pinocchio C++ library: A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives.2019 IEEE/SICE International Symposium on System Integration (SII)IEEE2019, 614--619
- 32 articleSacral Anterior Root Stimulation (SARS) and Visceral Function Outcomes in Spinal Cord Injury--A Systematic Review of the Literature Over Four Decades.World NeurosurgerySeptember 2021
- 33 inproceedingsCosypose: Consistent multi-view multi-object 6d pose estimation.European Conference on Computer VisionSpringer2020, 574--591
- 34 articleMegaPose: 6D Pose Estimation of Novel Objects via Render & Compare.arXiv preprint arXiv:2212.068702022
- 35 articleEstimating 3D Motion and Forces of Human--Object Interactions from Internet Videos.International Journal of Computer Vision13022022, 363--383
- 36 miscEffectiveness of hybrid robotic rehabilitation system on upper limb recovery of people with central injuries: a systematic review with meta-analysis.January 2021
- 37 articleMediapipe hands: On-device real-time hand tracking.arXiv preprint arXiv:2006.102142020