
2023Activity reportProject-TeamCAMIN
RNSR: 201622042U- Research center Inria Branch at the University of Montpellier
- Team name: Control of Artificial Movement & Intuitive Neuroprosthesis
- Domain:Digital Health, Biology and Earth
- Theme:Computational Neuroscience and Medicine
Keywords
Computer Science and Digital Science
- A1.2.6. Sensor networks
- A1.3. Distributed Systems
- A2.3. Embedded and cyber-physical systems
- A2.5.2. Component-based Design
- A4.4. Security of equipment and software
- A4.5. Formal methods for security
- A5.1.4. Brain-computer interfaces, physiological computing
- A5.9.2. Estimation, modeling
- A5.10.5. Robot interaction (with the environment, humans, other robots)
- A6.1.1. Continuous Modeling (PDE, ODE)
- A6.3.2. Data assimilation
- A6.4.1. Deterministic control
- A6.4.6. Optimal control
Other Research Topics and Application Domains
- B1.1.9. Biomechanics and anatomy
- B1.2.1. Understanding and simulation of the brain and the nervous system
- B2.2.1. Cardiovascular and respiratory diseases
- B2.2.2. Nervous system and endocrinology
- B2.2.6. Neurodegenerative diseases
- B2.5.1. Sensorimotor disabilities
- B2.5.3. Assistance for elderly
1 Team members, visitors, external collaborators
Research Scientists
- Christine Azevedo Coste [Team leader, INRIA, Senior Researcher, HDR]
- François Bailly [INRIA, Researcher]
- François Bonnetblanc [INRIA, Researcher, from Oct 2023, HDR]
- François Bonnetblanc [INRIA, Associate Professor Detachement, until Sep 2023, HDR]
- Thomas Guiho [INRIA, ISFP]
Post-Doctoral Fellows
- Tiago Coelho Magalhaes [INRIA, Post-Doctoral Fellow]
- Etienne Moullet [INRIA, Post-Doctoral Fellow]
- Sabrina Otmani [INRIA, Post-Doctoral Fellow, from Jun 2023]
- Fernanda Rodrigues Ferreira Lopes [UNIV MONTPELLIER, Post-Doctoral Fellow, until Mar 2023]
PhD Students
- Jonathan Baum [INRIA, from Dec 2023]
- Laurence Colas [REEV SAS, CIFRE]
- Gabriel Graffagnino [INRIA, from Nov 2023]
- Ronan Le Guillou [CHU TOULOUSE, until Nov 2023]
- Valentin Maggioni [INRIA, from Nov 2023]
- Felix Schlosser-Perrin [UNIV MONTPELLIER]
- Clément Trotobas [INRIA, until Aug 2023]
- Clotilde Turpin [INRIA, from Aug 2023]
- Clotilde Turpin [INNOPSYS, CIFRE, until Jul 2023]
- Lucie William [INRIA, until Jun 2023]
Technical Staff
- Sam Durand [INRIA, Engineer, until Jul 2023]
- Lucas Oliveira Da Fonseca [INRIA, Engineer, until Aug 2023]
- Olivier Rossel [INRIA, Engineer]
Interns and Apprentices
- Fanny Gerbet [INRIA, Intern, from Mar 2023 until Aug 2023]
- Alice Hernot [INRIA, Intern, from Feb 2023 until Aug 2023]
- Houssam Salama Alhandi [UNIV MONTPELLIER, Intern, from Jul 2023 until Aug 2023]
Administrative Assistant
- Claire-Marine Parodi [INRIA, from Sep 2023]
External Collaborators
- Charles Fattal [Centre Bouffard Vercelli USSAP, HDR]
- David Guiraud [NEURINNOV, from Feb 2023, HDR]
- Benoît Sijobert [INSTITUT ST-PIERRE, from Oct 2023]
2 Overall objectives
CAMIN research team is dedicated to the design and development of realistic neuroprosthetic solutions for sensorimotor deficiencies in collaboration with clinical partners. Our efforts are focused on clinical impact: improving the functional evaluation and/or patients quality of life. Movement is at the center of our investigative activity, and the exploration and understanding of the origins and control of movement are one of our two main research priorities. Indeed, optimizing the neuroprosthetic solutions depends on a deeper understanding of the roles of the central and peripheral nervous systems in motion control. The second research priority is movement assistance and/or restoration. Based on the results from our first research focus, neuroprosthetic approaches are deployed (Figure 1).
Electrical stimulation (ES) is used to activate muscle contractions by recruiting muscle fibers, just as the action potentials initiated in motoneurons would normally do. When a nerve is stimulated, both afferent (sensitive) and efferent (motor) pathways are excited. ES can be applied externally using surface electrodes positioned on the skin over the nerves/muscles intended to be activated or by implantation with electrodes positioned at the contact with the nerves/muscles or neural structures (brain and spinal cord). ES is the only way to restore movement in many situations.
Although this technique has been known for decades, substantial challenges remain, including: (i) detecting and reducing the increased early fatigue induced by artificial recruitment, (ii) finding solutions to nonselective stimulation, which may elicit undesired effects, and (iii) allowing for complex amplitude and time modulations of ES in order to produce complex system responses (synergies, coordinated movements, meaningful sensory feedback, high-level autonomic function control).
We investigate functional restoration, as either a neurological rehabilitation solution (incomplete spinal cord injury (SCI), hemiplegia) or for permanent assistance (complete SCI). Each of these contexts imposes its own set of constraints on the development of solutions.
Functional ES (FES) rehabilitation mainly involves external FES, with the objective to increase neurological recuperation by activating muscle contractions and stimulating both efferent and afferent pathways. Our work in this area naturally led us to take an increasing interest in brain organization and plasticity, as well as central nervous system (brain, spinal cord) responses to ES. When the objective of FES is a permanent assistive aid, invasive solutions can be deployed. We pilot several animal studies to investigate neurophysiological responses to ES and validate models. We also apply some of our technological developments in the context of human per-operative surgery, including motor and sensory ES.
Camin research is focused on exploring and understanding human movement in order to propose neuroprosthetic solutions in sensorimotor deficiency situations to assist or restore movement. Exploration and understanding of human movement will allow us to propose assessment approaches and tools for diagnosis and evaluation purposes, as well as to improve FES-based solutions for functional assistance.
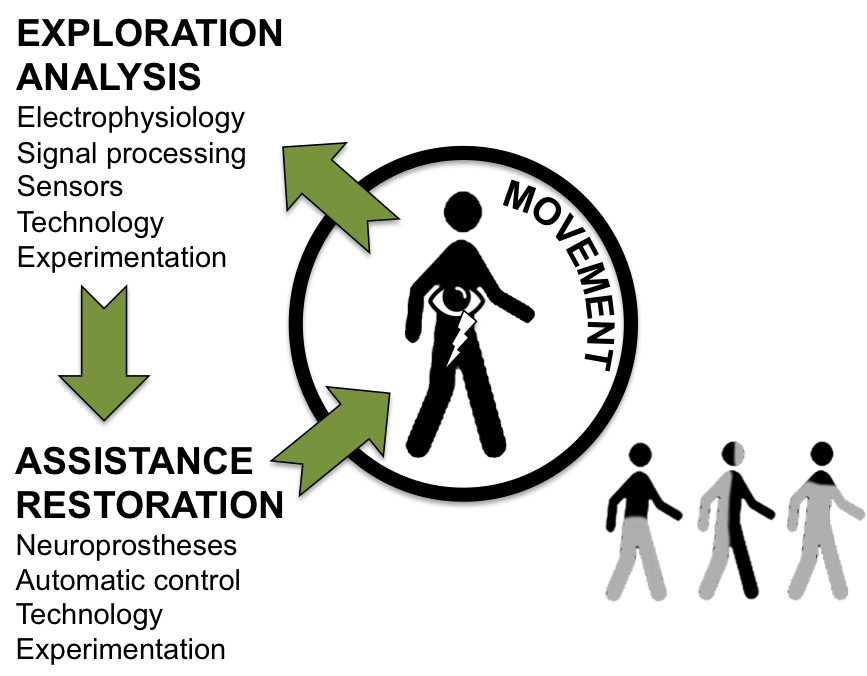
Overview of Camin general scientific approach.
We have chosen not to restrict our investigation spectrum to specific applications but rather to deploy our general approach to a variety of clinical applications in collaboration with our medical partners. Our motivation and ambition is to have an effective clinical impact.
3 Research program
3.1 Exploration and understanding of the origins and control of movement
One of Camin’s areas of expertise is motion measurement, observation and modeling in the context of sensorimotor deficiencies. The team has the capacity to design advanced protocols to explore motor control mechanisms in more or less invasive conditions in both animal and human.
Human movement can be assessed by several noninvasive means, from motion observation (MOCAP, IMU) to electrophysiological measurements (afferent ENG, EMG, see below). Our general approach is to develop solutions that are realistic in terms of clinical or home use by clinical staff and/or patients for diagnosis and assessment purposes. In doing so, we try to gain a better understanding of motor control mechanisms, including deficient ones, which in turn will give us greater insight into the basics of human motor control. Our ultimate goal is to optimally match a neuroprosthesis to the targeted sensorimotor deficiency.
The team is involved in research projects including:
-
Peripheral nervous system (PNS): modeling, exploration and electrophysiology
Electroneurography (ENG) and electromyography (EMG) signals inform about neural and muscular activities. The team investigates both natural and evoked ENG/EMG through advanced and dedicated signal processing methods. Evoked responses to ES are very precious information for understanding neurophysiological mechanisms, as both the input (ES) and the output (evoked EMG/ENG) are controlled. Camin has the expertise to perform animal experiments (rabbits, rats, earthworms and big animals with partners), design hardware and software setups to stimulate and record in harsh conditions, process signals, analyze results and develop models of the observed mechanisms. Experimental surgery is mandatory in our research prior to invasive interventions in humans. It allows us to validate our protocols from theoretical, practical and technical aspects.
-
Central nervous system (CNS) exploration
Stimulating the CNS directly instead of nerves enables direct activation of the neural networks responsible for generating functions. Once again, if selectivity is achieved the number of implanted electrodes and cables would be reduced, as would the energy demand. We have investigated spinal electrical stimulation in animals (pigs) for urinary track and lower limb function management. This work is very important in terms of both future applications and the increase in knowledge about spinal circuitry. The challenges are technical, experimental and theoretical, and the preliminary results have enabled us to test some selectivity modalities through matrix electrode stimulation. This research area will be further intensified in the future as one of the ways to improve neuroprosthetic solutions.
We intend to gain a better understanding of the electrophysiological effects of Direct Electrical Stimulation (DES) through electroencephalographic (EEG) and electrocorticographic (ECoG) recordings in order to optimize anatomo-functional brain mapping, to better understand brain dynamics and plasticity, and to improve surgical planning, rehabilitation, and the quality of life of patients.
-
Muscle models and fatigue exploration
Muscle fatigue is one of the major limitations in all FES studies. Simply, the muscle torque varies over time even when the same stimulation pattern is applied. As there is also muscle recovery when there is a rest between stimulations, modeling the fatigue is almost an impossible task. Therefore, it is essential to monitor the muscle state and assess the expected muscle response by FES to improve the current FES system in the direction of greater adaptive force/torque control in the presence of muscle fatigue.
-
Movement interpretation
We intend to develop ambulatory solutions to allow ecological observation. We have extensively investigated the possibility of using inertial measurement units (IMUs) within body area networks to observe movement and assess posture and gait variables. We have also proposed extracting gait parameters like stride length and foot-ground clearance for evaluation and diagnosis purposes.
3.2 Movement assistance and/or restoration
The challenges in movement restoration are: (i) improving nerve/muscle stimulation modalities and efficiency and (ii) global management of the function that is being restored in interaction with the rest of the body under voluntary control. For this, both local (muscle) and global (function) controls have to be considered.
Online modulation of ES parameters in the context of lower limb functional assistance requires the availability of information about the ongoing movement. Different levels of complexity can be considered, going from simple open-loop to complex control laws (Figure 2).
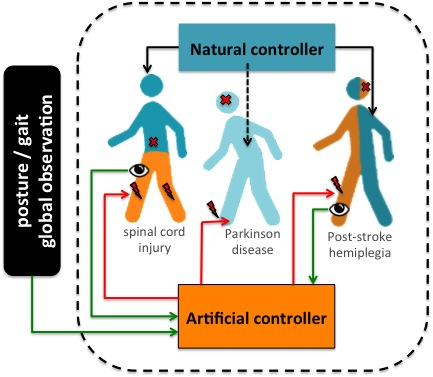
FES assistance should take into account the coexistence of artificial and natural controllers. Artificial controllers should integrate both global (posture/gait) and local (limb/joint) observations.
Real-time adaptation of the stimulation patterns is an important challenge in most of the clinical applications we consider.The modulation of ES parameters requires more advanced adaptative controllers based on sensory information in order to adapt to muscle fatigue or environmental changes. A special care in minimizing the number of sensors and their impact on patient motion should be taken.
4 Application domains
4.1 Movement Assistance
CAMIN develops neuroprosthetic solutions dedicated to restore or assist movements of paralyzed limbs. Among the considered functions we can cite: pedalling, grasping or walking. Different users are considered: individuals with post-stroke hemiplegia, people with spinal cord lesions and persons with Parkinson disease.
We have also started to develop skills in orthosis design.
4.2 Movement Analysis
For the purpose of assisting movement, CAMIN has developped an important expertise in movement interpretation using a large range of sensors: inertial measurement units, MOCAP systems, encoders, goniometers... Various Classification methods are used depending on the objective.
This knowledge is applied in other applications than movement assistance, like in MEDITAPARK project where we developped an application (PARAKEET) embedded in a smartwatch to monitor hand tremor in persons with parkinson disease.
4.3 Evoked electrophysiology
CAMIN develops solutions to trigger, record and process electrophysiological signals evoked by electrical stimulation applied to various neural tissues. These evoked responses are used to control the activity of the excitable tissue, to probe its electrophysiological status for diagnostic purposes and to investigate the conductivity/connectivity between the stimulation and the recording sites (electrophysiological mapping).
These neural engineering procedures can be applied to muscle, nerve, spinal cord and brain, in animals and humans.
For instance, electrical stimulations can be applied externally and non-invasively on muscles to induce muscle contractions as well as invasively on the human brain in order to guide neurosurgeries.
5 Social and environmental responsibility
5.1 Impact of research results
CAMIN research is clearly dedicated to applications which intend to improve quality of life and/or self esteem of individuals with sensori-motor deficiencies.
We give a very important place to ethics in our work. Christine Azevedo is a member of INRIA ethical committee COERLE.
Our activities are associated to an important working load on designing protocols and obtaining authorizations from ethical committees and/or health agencies. We list in the following the protocols that have obtained authorizations and were valid in 2023.
- Measure of the Potential Evoked by Electric Stimulation (PE & CE). CHU Montpellier. Autorisation CPP RCB 2014-A00056-43. ClinicalTrials.gov Identifier: NCT02509442
- Exofinger: a tool for entering objects. COERLE (autorisation nº 2021-47 Exofinger)
- SOFTMOCAP : Comparaison de trois méthodes d’analyse des mouvements de la main chez des sujets valides. COERLE (autorisation nº 2022-57 SOFTMOCAP)
- AGILISTIM: Functional Evaluation of Grip Restoration in tetraplegic patients by implanted neural stimulation. Autorisation CPP/ANSM ID-RCB: 2022-A00205-3815.
- Ethics approval for an experiment on hybrid orthosis from Institutional Ethics Committee of the Federal University of Minas Gerais (CAAE Registration: 53757521.3.0000.5149)
- “EEG-FES stroke rehabilitation evaluation based on runtime data” (GRASP-IT project) COERLE (autorisation nº 2023-12 EEG-FES).
- GRASPHYB. COERLE (autorisation nº 2023-14 GRASPHYB).
- Prehens-Stroke 2: Prospective multicenter study on the evaluation in clinical setting of a Grasp NeuroProsthesis and self-triggering control modalities for the restauration of paretic side prehension capabilities in post-stroke subjects. Study carried by the University Hospital (CHU) of Toulouse in collaboration with the Le Grau du Roi rehabilitation center from the University Hospital (CHU) of Nîmes (ClinicalTrial.gov ID: NCT04804384; Autorisation CPP ID-RCB: 2020-A01660-39).
- Grasp-Again: Prospective monocentric, real-life, feasibility case series study on 2 months long usage of a wearable grasp neuroprosthesis, at home in autonomy by post-stroke participants. Study carried by the University Hospital (CHU) of Toulouse (ClinicalTrial.gov ID: NCT05625113; Autorisation CPP ID-RCB: 2022-A01202-41).
5.2 HLI: Humanlab INRIA
Humanlabs are collaborative spaces for digital fabrication or repair of objects, open to people with disabilities to enable them to appropriate technology for their own use. In 2021, Christine Azevedo and Roger Pissard-Gibollet (SED INRIA Montbonnot) have launched the Inria’s HumanLab intiative. HLI contributes to meeting the needs expressed by individuals with disabilities within the framework of the Humanlabs network or via clinical partners. Our action is part of a frugal and opensource innovation approach and aims to implement the scientific and technological know-how of Inria’s staff to meet specific needs. www.inria.fr/en/hli
6 Highlights of the year
Ai-Hand EU project was launched in August 2023. This project is the last stage of a 10-year effort in the team to propose a solution to patients with complete tetraplegia.
7 New software, platforms, open data
7.1 New software
7.1.1 i-GRIP
-
Keywords:
Handicap, Computer vision, Persons attendant, Exoskeleton, Detection
-
Scientific Description:
Detection of object grasping intention and automatic selection of grasp type for shared control of (neuro)prostheses.
-
Functional Description:
From a video stream of hands and objects, i-GRIP detects the intention to grasp one of them and identifies the grip the hand should adopt to appropriately seize it based on the approaching movement. i-GRIP will enable intuitive and low cognitive load control of hand movement assistive devices (exoskeletons, functional electrical stimulation, prosthetics).
-
Authors:
Etienne Moullet, Christine Azevedo Coste, Francois Bailly
-
Contact:
Etienne Moullet
7.1.2 RAT_GAIT_GUI
-
Keyword:
GUI (Graphical User Interface)
-
Functional Description:
This Python program provides a graphical user interface (GUI) to control a Neurinnov Stim RG stimulator and perform functional electrical stimulation (FES) artificial gait cycles on rats. The GUI is built using the Tkinter library and allows users to interact with the StimRG stimulator in an intuitive and user-friendly manner.
-
Authors:
Sam Durand, Christine Azevedo Coste
-
Contact:
Christine Azevedo Coste
7.2 New platforms
7.2.1 RESCUEGRAPH: Gait analysis platform for rodents
Participants: Sam Durand, François Bailly, Christine Azevedo.
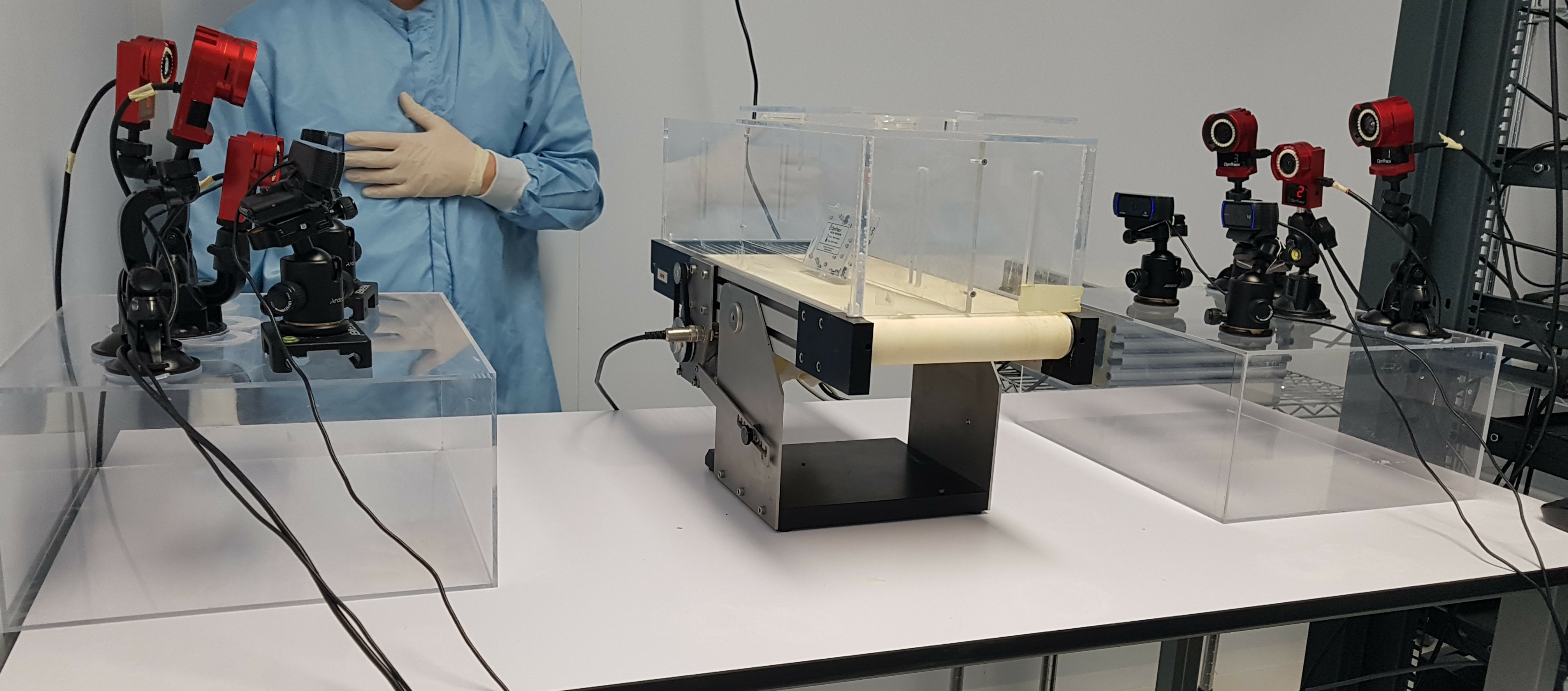
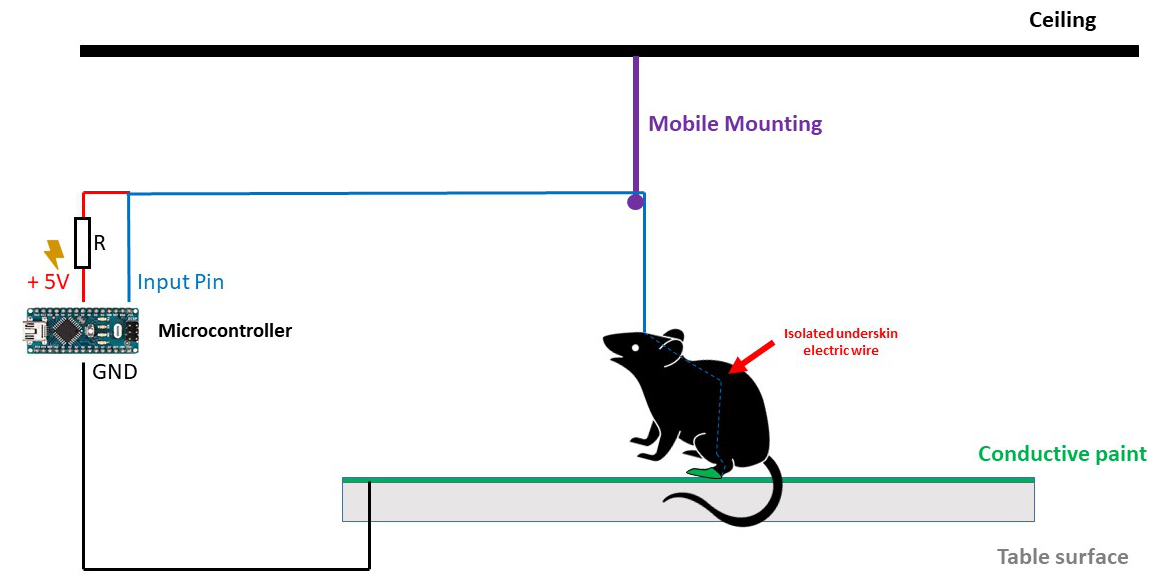
Within RESCUEGRAPH project (FLAGERA), the objective is to set up a gait platform to analyze rat gait and assess electrical stimulation effects. We have set up a platform for the analysis of 2D kinematics of the 2 hindlimbs of the rat during gait. During visits to the UAB lab, cameras and devices available were tested, and the requirements for the in vivo studies were set. Infrared cameras available at UAB and INRIA have been used to record movements of reflexive markers placed on key points of the hindlimbs of the animal. The idea is to have a sagittal analysis of kinematics of the two hindlimbs over consecutive steps. New colour skin markers are also implemented to improve the detection. Preliminary tests have been done with a setup to detect in real time the stepping of the rat with a conductive fabric adapted on the treadmill and conductive paint in the animal paw (fig.3).
7.2.2 ORTHYB experimental setup
A motorized mechanical cable-driven orthosis for the wrist and fingers was designed and developed (Exo Hand, Aufratech, France). A prototype was manufactured for the right arm. Two drive units are integrated, comprising a 3W DC motor, a reduction stage, and an encoder. Each motor unit pulls cables, one motor actuating flexion-extension of the wrist joint, and one motor actuating flexion of all 5 fingers simultaneously. The orthosis is powered from the main supply (14V - 700mA). The mechanical orthosis is controlled by an Adafruit Feather nrf52840 control board, which is coupled with a DC double-channel driver (L298N). The two encoders of the mechanical orthosis are connected to input pins on the control board to receive signals and are powered by the board itself. To facilitate control and communication, the microcontroller is connected to a computer via a serial communication protocol (serial COM). An electrical stimulator (Phenix Neo©, Montpellier, France) composed of a base controller connected to a computer and two wireless stimulation units (PODs) featuring 2 stimulation channels each. 3 pairs of surface electrodes were used, for activating (1) extension of the wrist and fingers (2) finger flexion, and (3) thumb flexion. The controller base is connected to the computer with a serial COM.
ORTHYB controller pilots the 3 electrical stimulation channels and the 2 DC motors. A multi-threaded Graphical User Interface (GUI) has been developed in Python (fig.4). It manages the communication with the motor control board and the stimulator controller through Serial COM. The controller operates as a state machine, allowing independent control of the orthosis or stimulator, as well as the simultaneous control of both devices based on the selected settings. A push button controlled with the contralateral fist has been developed for the participant to trigger the change of state. The orthosis incorporates two sensors which are rotary encoders, one per actuator. ORTHYB controller continuously estimates the relative position from the input signals.
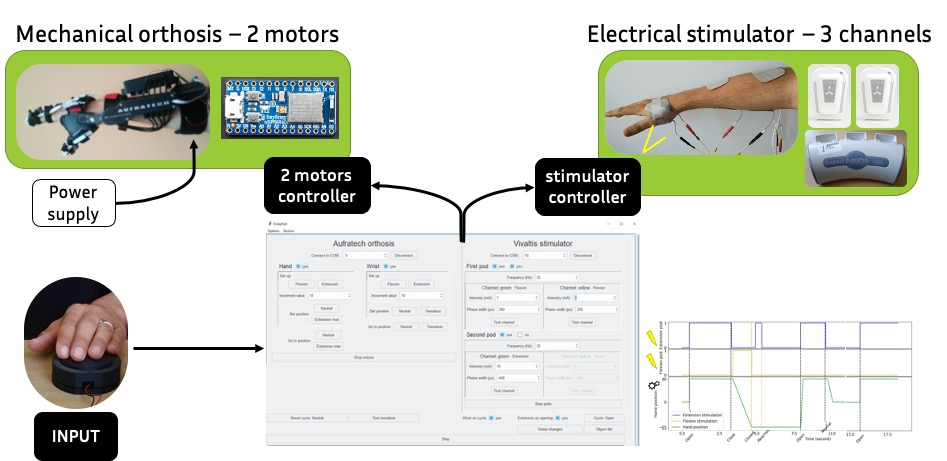
The ORTHYB consists of the main controller (GUI in the center) which accepts input control signal from a switch button to control the 2 motor controllers of the mechanical orthosis and the 3 stimulation channels of electrical stimulator.
8 New results
We have organized this section around 3 main subsections: 8.1) Brain Potentials Evoked by Direct Electrical Stimulation for on-line guidance of Neurosurgery, 8.2) Movement analysis, detection and modelling and 8.3) Motor functions assistance
8.1 Brain Potentials Evoked by Direct Electrical Stimulation for on-line guidance of Neurosurgery: a combined experimental and simulation approach
Participants: Clotilde Turpin, Felix Schlosser-Perrin, Olivier Rossel, Emmanuel Mandonnet [AP-HP, France], Hugues Duffau [CHU-Montpellier, France], Sam Ng [CHU-Montpellier, France], Riki Matsumoto, François Bonnetblanc.
8.1.1 Understanding the Effects of Direct Electrical Stimulation applied to the Brain: Electrogenesis of Direct Cortical Responses and Axono-Cortical Evoked Potentials
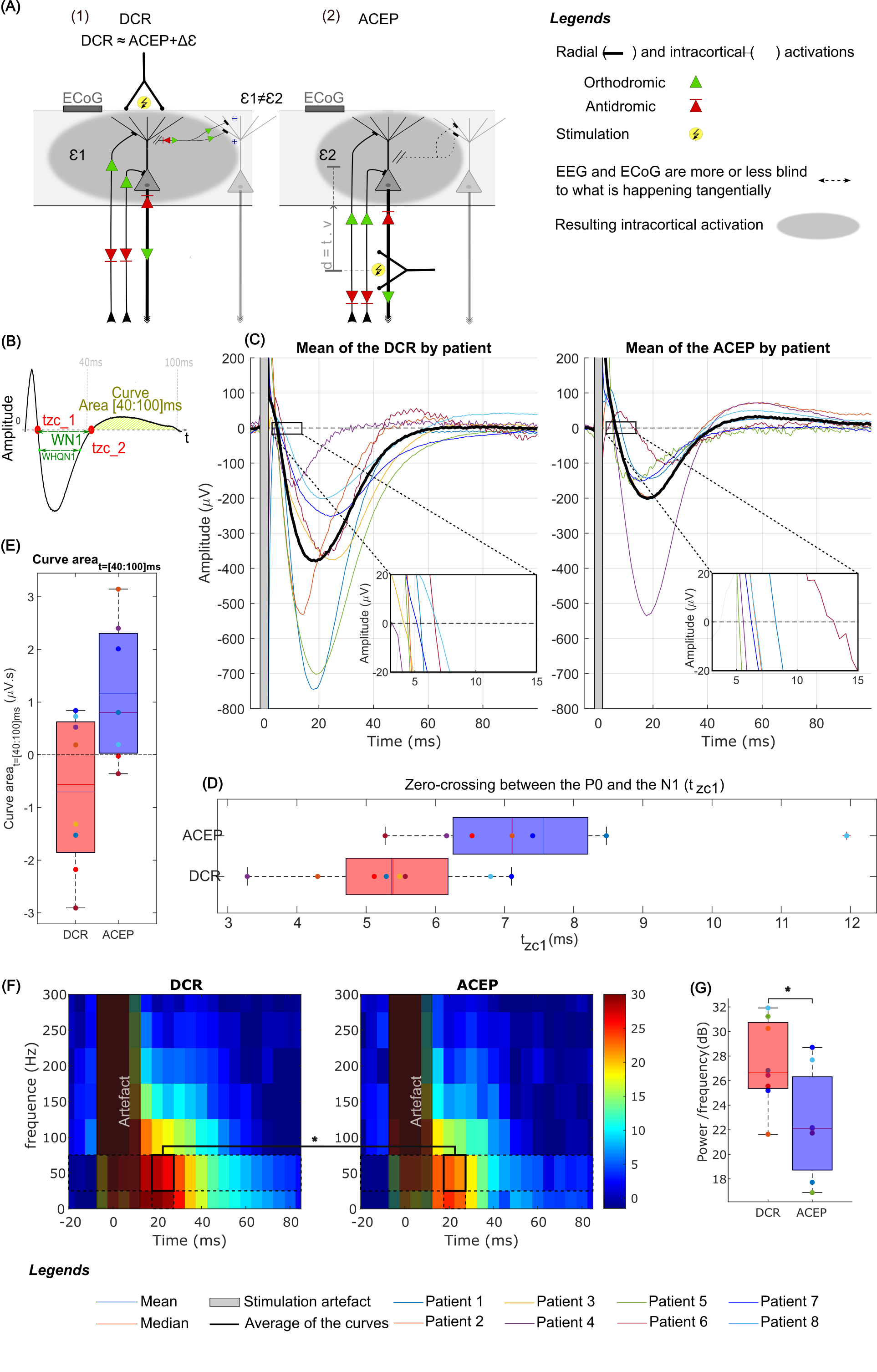
Measuring potentials evoked (EP) by direct electrical stimulation (DES) during brain surgery is emerging as a real-time method for identifying structural or anatomical connectivity while preserving it. This novel approach enables recording and observation of various responses in the operating room, including (i) direct cortical response (DCR: DES and recording at the same cortical site, on the same gyrus), (ii) cortico-cortical evoked potentials (CCEP: DES and recording on distant cortical sites), and (iii) axono-cortical (ACEP: DES on white matter tracts with corresponding cortical recording). Whether applied in the cavity on white matter pathways or on the cortical surface on grey matter, these two response types share common features, strongly suggesting the involvement of identical electrophysiological activities by DES. However, DES applied directly to the cortex could also generate activities in intra-cortical axons and dendrites in contrast to “more natural” activations through the white matter pathways as is the case for ACEP. Specifically, the application of DES to the cortical surface for DCR appears to induce additional activation of smaller and slower intra-cortical non-myelinated axons within the cortical layer surrounding pyramidal neurons. This tangential intra-cortical activation induces changes in the later componenets of the N1 for DCR (Fig. 5). An average frequency spectrum of DCR and ACEP was conducted to identifiy more significant and continuous Gamma activity during the relaxation phase of DCR. However, punctual activity in the 50Hz band was only significantly more pronounced for DCRs in two time windows centered around 20 and 25 ms (with a step of 5ms), particulalry in the vicinity of the maximum amplitude of the response. Another important difference between DCR and ACEP is associated with the delay between axon stimulation in the case of ACEP and its propagation to the cortical layer. The zero crossing of the signals illustrates this delay of a few milliseconds induced by DES applied to subcortical white matter pathways in the case of ACEP.
8.1.2 Pseudo-cortical model for better understanding of the effects of direct electrical stimulation applied to the cortex
Participants: Felix Schlosser-Perrin, Olivier Rossel, Emmanuel Mandonnet [AP-HP, France], Riki Matsumoto, François Bonnetblanc.
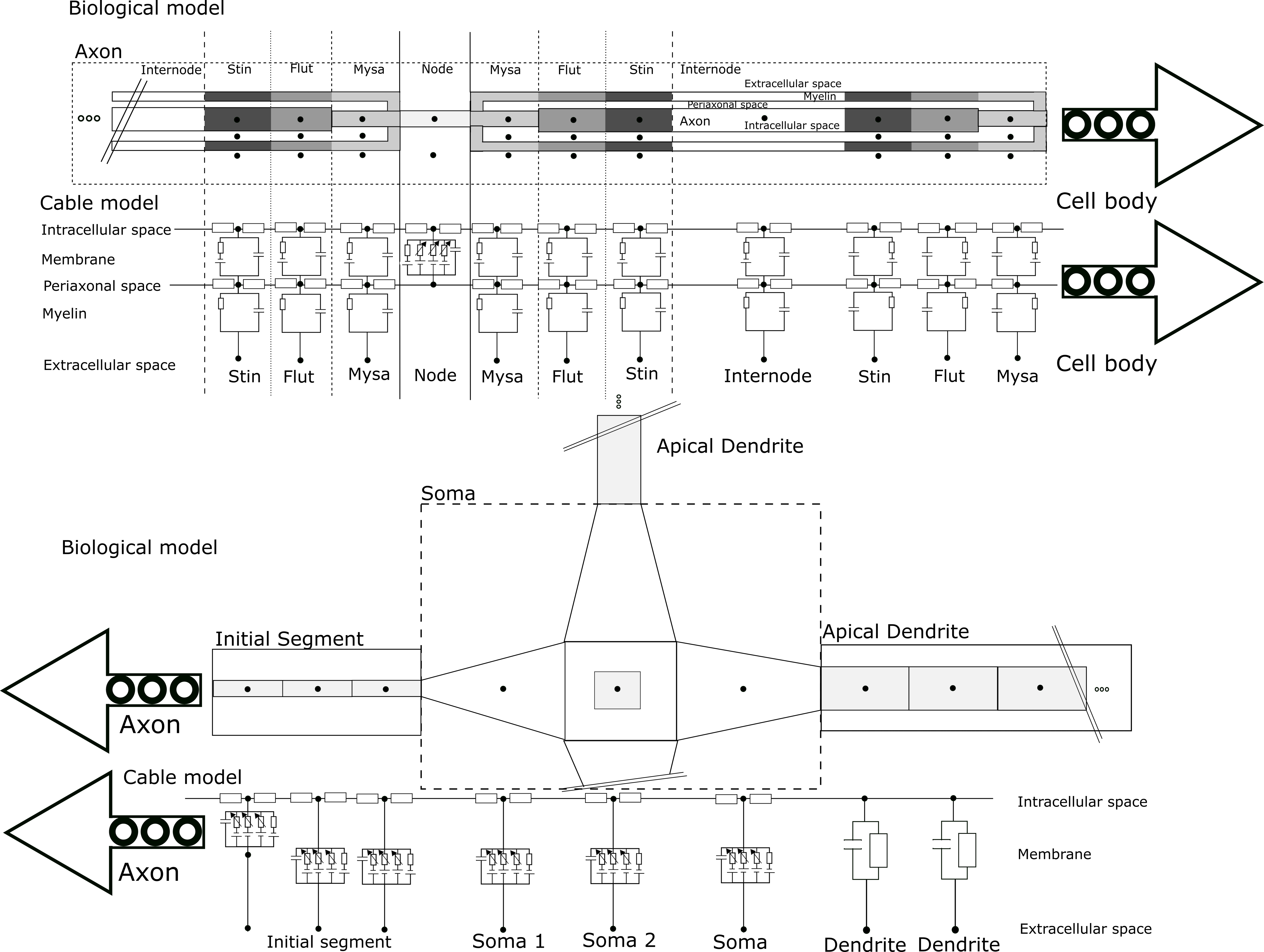
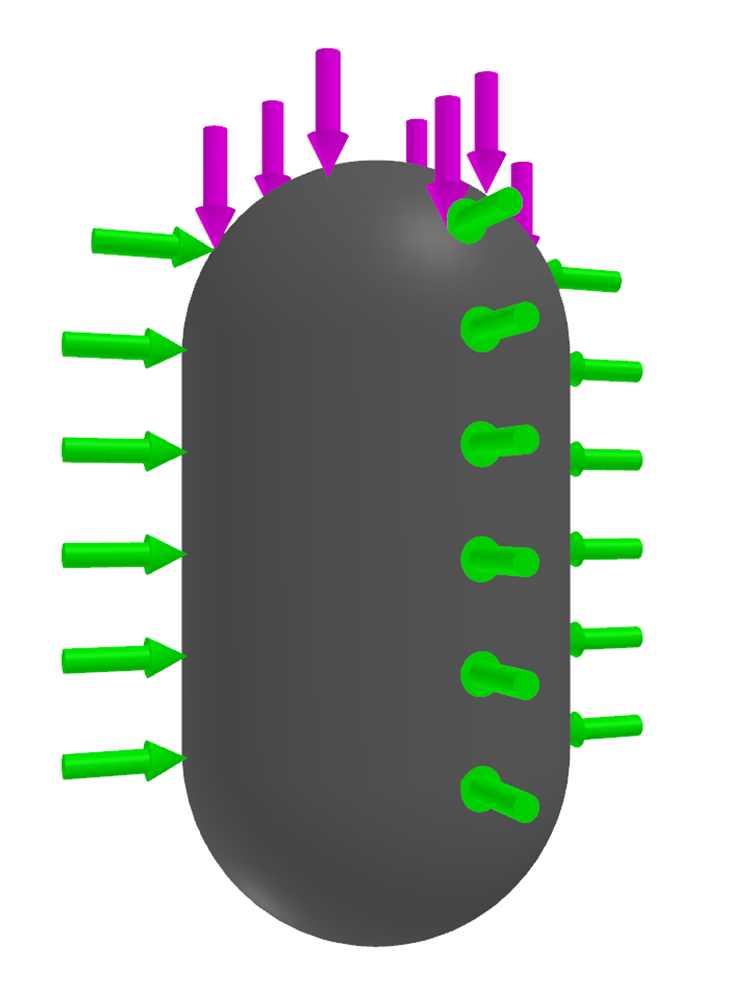
To better understand the effects of direct electrical stimulation applied to the cortex and to know how it induces evoked potentials at a distance from the stimulation site (cortico-cortical evoked potential: CCEP), we used models of classical axons arranged radially and developped somatic and dendritic endings (Fig. 6). We planned to compare the simulations produced by this model with the experimental data and the potentials evoked by electrical stimulation to verify that the variation of the electrical stimulation parameters (in particular the intensity) predicts the variation of the early components of the measured CCEPs, this in connection with the variation of local responses (i.e. direct cortical response, DCR). This approach should allow us to better understand evoked electrogenesis and optimize electrical stimulation applied to the brain in the case of neurosurgery.
8.2 Movement analysis, detection and modelling
8.2.1 SOFTMOCAP
Participants: Christine Azevedo, François Bailly, Sam Durand, Valentin Maggioni.
In this work, we assess the accuracy of three motion capture systems for conducting biomechanical analysis of the hand. The systems evaluated are a computer vision and CNN-based method 29, a combination of three Leap Motion 27 controllers (a commercial infrared hand motion capture device), and a traditional motion capture setup considered as the gold standard.
Our study aims to quantify the error of two markerless motion capture systems, specifically the video-based method and Leap Motion, compared to traditional motion capture during ecological tasks such as free-field movement and object grasping. We employed inverse kinematics to compare the joint angles of a hand model superimposed to the point clouds obtained from each system. This evaluation will enable us to ascertain if these markerless devices can be reasonably considered viable alternatives to marker-based motion capture systems for such manual tasks.
Accurately tracking hand movements has a multitude of potential applications in different domains, including biomedical research, sports (e.g., climbing, e-sports), leisure (e.g., music playing), or whenever there is handling movement involved. In rehabilitation, accurate tracking of hand movements will be a valuable tool for monitoring and improving patient progress in our current AI-HAND project, which aims to restore hand function in tetraplegics through selective electrical neural stimulation 24.
8.2.2 i-GRIP: Towards intuitive upper-limb assistive devices, a vision-based interface for grasping intention detection and grip selection
Participants: Etienne Moullet, Christine Azevedo, François Bailly, Justin Carpentier [INRIA WILLOW].
Grasping is crucial for many daily activities, and its impairment considerably impacts quality of life and autonomy. Attempts to restore this function may rely on various approaches and devices (functional electrical stimulation, exoskeletons, prosthesis…) with command modalities often exert considerable cognitive loads on users and lack controllability and intuitiveness in daily life 24, 25. We propose a novel user interface for grasping movement control in which the user delegates the grasping task decisions to the device, only moving their (potentially prosthetic) hand toward the targeted object.
Apparatus and computer vision tools
Required information for assisting an ongoing grasping task is the following: 1) hand position and orientation; 2) object position and orientation; 3) object nature (including shape and potentially weight and texture). We use an OAK-D S2 (Luxonis) stereoscopic RGB camera as a data acquisition sensor, prioritizing cost, ease of use, installation and universality, as it may be easily mounted on a wheelchair or a hat. Hand pose estimation was performed using Google’s MediaPipe 29, leveraging stereoscopic vision for depth estimation. Object identification and pose estimation were achieved using CosyPose 26, a multi-object 6D pose estimator trained on a set of objects with known 3D models.
Grasping intention detection
Hand and objects' pose are estimated and represented in a 3D virtual scene for grasping intention detection. The hand movement's direction is predicted from the hand's past trajectory and instantaneous velocity. A virtual cone with a length and diameter embedding scalar velocity is formed by multiple rays, whose intercepts with objects' 3D mesh are used to determine what (if any) object is targeted.
Time before impact estimation
We defined the expected area of impact as the mesh triangle intercepted by a ray defined as the barycenter of the intercepting rays. Time before impact was evaluated by integrating the extrapolated velocity of the hand up to the area of impact.
Grip selection
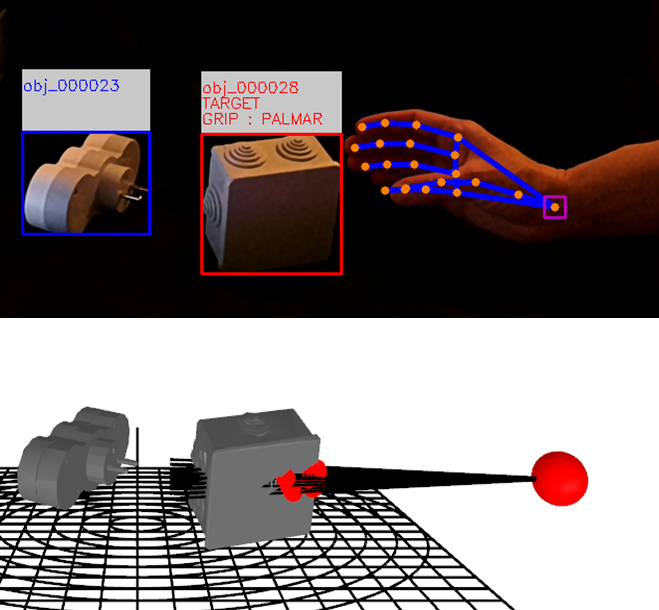
Once the target is identified, the foreseen vector of impact is used to select the appropriate grip among a predefined set. A 4-dimensional table (illustrated in Fig. 7) was constituted for each object of the used set in which a grip is attributed to every tuple formed by the mesh triangle representing the expected area of impact and the hand’s normed velocity .
Result and experiment
Figure 8 shows a snapshot of the video feed of a grasping task on the upper part and the corresponding virtual scene on the lower part. Object 000028 was correctly detected as the target, while object 000023 was ignored. Area of impact was estimated from the ray intercepts figured as red dots, and a palmar grip was accordingly selected 19.
An experimental study has been initiated and is divided in three phases :
- Participants are randomly instructed to grasp an object (among 4) with a given grip. Video recordings of the task are analyzed offline to fine-tune the parameters of our algorithm and the grip selection table.
- During a similar task, real-time performances of the i-GRIP algorithm for static objects are assessed.
- During a similar task, real-time performances of the i-GRIP algorithm for mobile objects.
8.2.3 Trajectory optimization for biomechanics
Participants: François Bailly, Pierre Puchaud [Univ. Montréal], Amedeo Ceglia [Univ. Montréal], Mickael Begon [Univ. Montréal], Benjamin Michaud [Univ. Montréal].
In this collaboration with Université de Montréal, we develop software 12 and methods 13, 9 to improve trajectory optimization applied to biomechanics. These tools are then aplied to multiple applied research project inside the CAMIN team (see 8.3.B).
8.3 Motor functions assistance
We have organized this subsection around 3 main sub-parts: A) Upper-limb function restoration, B) Lower-limb function restoration and C) Towards new designs for assistive devices.
A. Upper-limb function restoration
8.3.1 Implanted multi-contact epineural stimulation to restore hand function in complete upper-limb paralysis
AGILISTIM
Participants: Lucie William, François Bailly, Thomas Guiho, Christine Azevedo, David Guiraud [Neurinnov, France], Charles Fattal [USSAP, France], Jacques Teissier [Clinique St Jean Sud de France], Antoine Geffrier [AP-HP Paris, France].
Following AGILIS project (EIT Health), AGILISTIM project (funded by ISITE-MUSE University of Montpellier) consisted in implanting three multi-contact neural cuff electrodes around radial, ulnar and median nerves of 2 new participants with high tetraplegia (NCT04306328). The electrodes were maintained during 28 days. The purpose was to study the safety and capability of these electrodes to generate synergistic motor activation and functional movements and to test control interfaces that allow subjects to trigger pre-programmed stimulation sequences. The device consisted of a pair of epineural electrodes and percutaneous cables with two extracorporeal connection cables inserted during a surgical procedure and removed after 28 days (see Fig. 9).
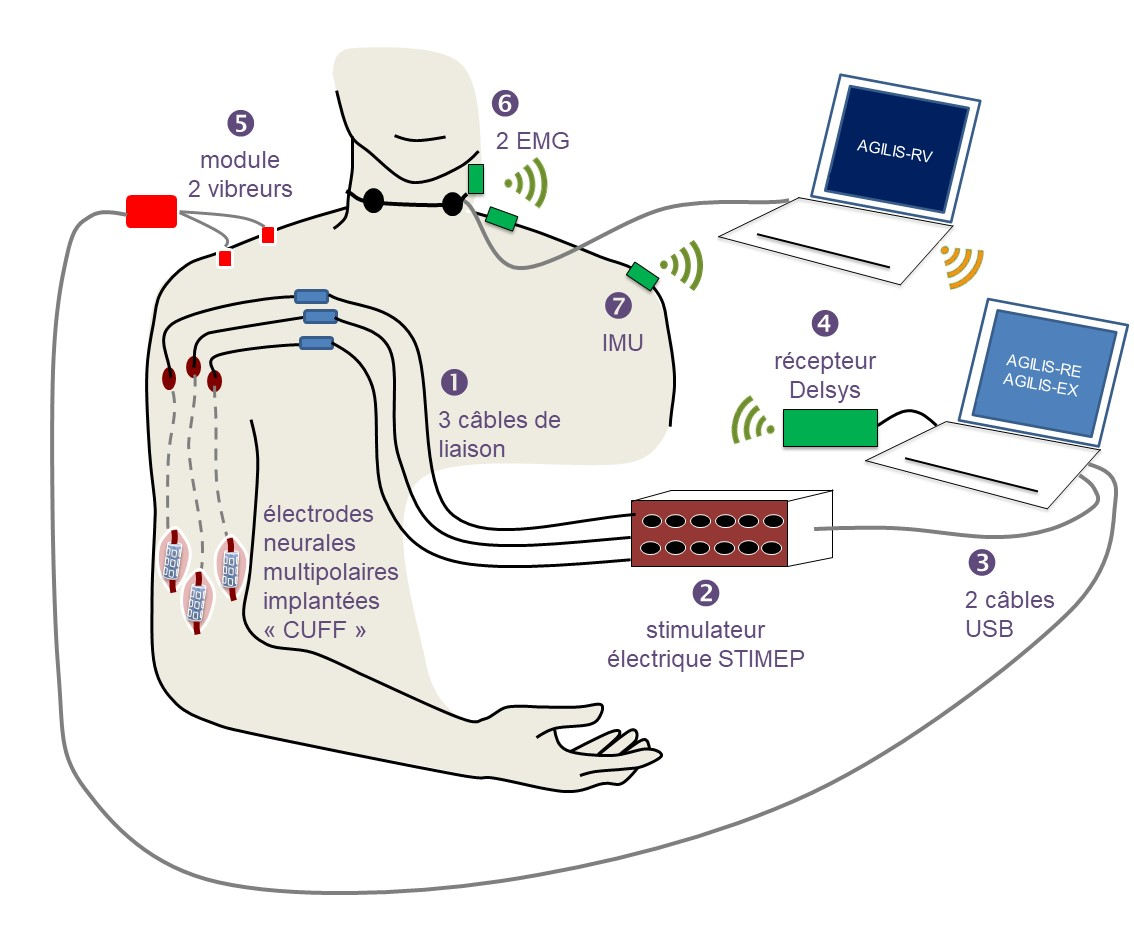
Scheme representing an idividual with 3 neural electrodes wrapped around median, radial and ulnar nerves ont the right upper limb, above the elbow. The cables are passing under the skin towards the shoulder. The cables cross the skin just under the shoulder to connect to an external stimulator, itself connected to a computer. Several external sensors are also represented on the contra lateral limb (IMU / EMG).
Both participants were able to execute several grasping tasks using the approach. The new AI-HAND project (EIC pathfinder) starting from August 2023 intends to test an implant developed by NEURINNOV company in a first in man trial in 2025. project.inria.fr/aihand
AI-Hand
Participants: Valentin Maggioni, Jonathan Baum, François Bailly, Thomas Guiho, Christine Azevedo, David Guiraud [Neurinnov, France], Charles Fattal [USSAP, France], Jacques Teissier [Clinique St Jean Sud de France], Antoine Geffrier [AP-HP Paris, France].
The AI-Hand European project, which began in August 2023, focuses on the development of an implant for neural stimulation - supported by Neurinnov - to restore wrist and hand function in individuals with tetraplegia. In this framework, the project is divided into two successive phases, a phase dedicated to the development/refinement of the approach that will immediately be followed by a clinical phase by 2026 (first implantation in people with tetraplegia). The CAMIN team, which is coordinating the project, is currently focusing its efforts on two areas:
- Preparing experiments on large animals (pigs) to support the manufacture of the implant (involving Jonathan Baum, Thomas Guiho, Christine Azevedo, David Guiraud).
- The development of an upper limb neuromusculoskeletal simulator capable of supporting the refinement of movements by optimizing stimulation parameters (thesis work by Valentin Maggioni and involvement of François Bailly and Christine Azevedo).
PLASTICISTIM
Participants: Jonathan Baum, Thomas Guiho, Christine Azevedo, David Guiraud [Neurinnov, France].
The PLASTICISTIM project can be described as a complementary initiative to the AI-Hand project. Its aim is to study the benefits of combining peripheral nerve stimulation (PNS) - as investigated in AI-Hand - with spinal cord stimulation (SCS) for restoring motor function in spinal cord injured individuals. The aim of this combination is to potentiate the direct restoration of motor function enabled by PNS with a progressive refinement of movements due to SCS. Indeed, recent studies attest to the impact of SCS in facilitating the passage of degraded voluntary commands and also in the progressive restoration of motor functions (following long-term clinical trials combining SCS and physical rehabilitation exercise). The literature does not reference any study exploring this combination and the aim of the PLASTICISTIM project, which should be seen as a proof of concept, is to pave the way for a new therapeutic approach enabling the restoration of numerous functions in people with spinal cord injuries. PLASTICISTIM is the topic of Jonathan Baum's PhD thesis - which started in December 2023 - and will be based on alternating phases of in vivo exploration (on large animals - pigs) and biosignals processing. The project is currently at the literature survey stage, but should be based on transcutaneous SCS in order to benefit from its ease of access, low cost and non-invasive nature.
8.3.2 Post Stroke upper limb neuroprosthesis
Participants: Ronan Le Guillou, Christine Azevedo, David Gasq [CHU Toulouse].
Post Stroke upper limb neuroprosthesis : Clinical evaluation (Project Prehens-Stroke 2)
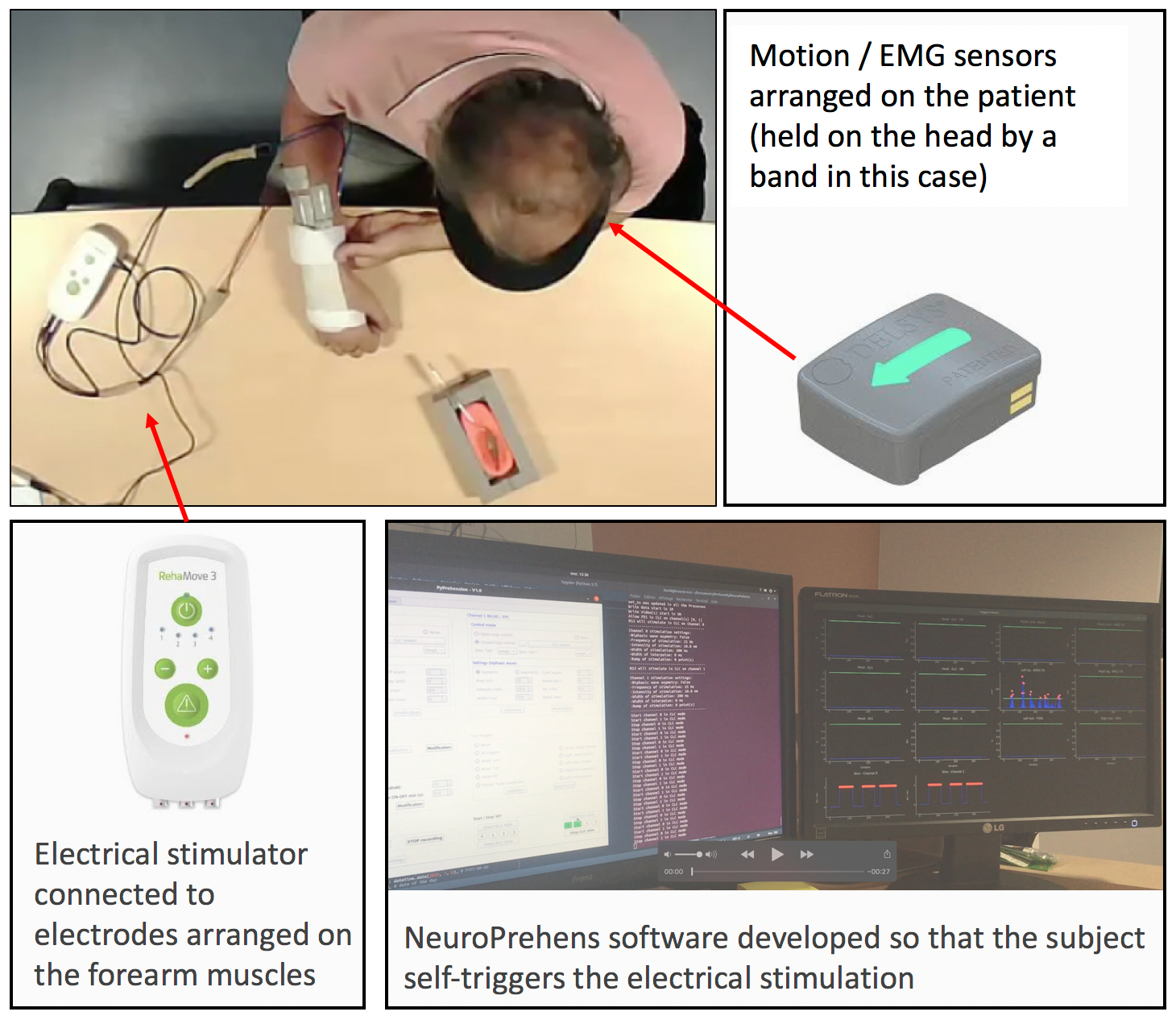
The improvement of grasping abilities remains a challenge in 50% of post-stroke subjects who have not recovered a functional grasp on their paretic side due to paralysis of the finger’s extensor muscles. Following the Prehens-Stroke 1 (ePrehension-Stroke) study in 2019-2020 and its informative results, a new study was started. The PHRCi Prehens-Stroke 2 project (ClinicalTrials.gov Identifier: NCT04804384) aims to evaluate the piloting modalities and the functional impact of a grasping neuroprosthesis in the vascular hemiparetic patient (Fig. 10). Head lateral inclination, foot motion and voice control are being investigated as self-triggering modalities for the user to perform FES induced paretic hand opening. As of the end of 2022, a total of 15 patients had been fully included in this protocol. Inclusions continued throughout 2023, with a total of 21 participants by the end of 2023. This was notably done through the opening of a second inclusion center in the medical rehabilitation center of the University Hospital of Nîmes in Le Grau-du-Roi, collaborating with the CHU of Toulouse on this study. We have evaluated the system's responsiveness, the control modalities proposed and the functional improvements provided by the GNP.
Post Stroke upper limb neuroprosthesis : Home-use investigation (Project Grasp-Again)
An embedded version of the Grasp Neuro-Prosthesis developed for the Prehens-Stroke studies, based on the CE marked FESIA Grasp upper-limb rehabilitation stimulator (Fig. 11) was designed, developed and tested throughout the year 2022. This embedded version was used in the Grasp-Again protocol (ClinicalTrial.gov ID: NCT05625113; ID-RCB: 2022-A01202-41), carried out in 2023 from January to July, with 6 post stroke participants, aiming to investigate the use of such a wearable grasp neuro-prosthesis in practical conditions, at home, in autonomy. We evaluated various aspects such as its functional impact on activities of daily living, its responsiveness to user commands and followed and described its use by the participants throughout the 2 months of usage in the protocol.

The software APPs of this platform can be found at https://bil.inria.fr/fr/software/view/3520/tab and https://bil.inria.fr/fr/software/view/3559/tab as the IMUSEF and NeuroPrehens projects respectively, with the Bil Ids: Software_3520 and Software_3559. The IMUSEF software was made Open-source in October 2023.
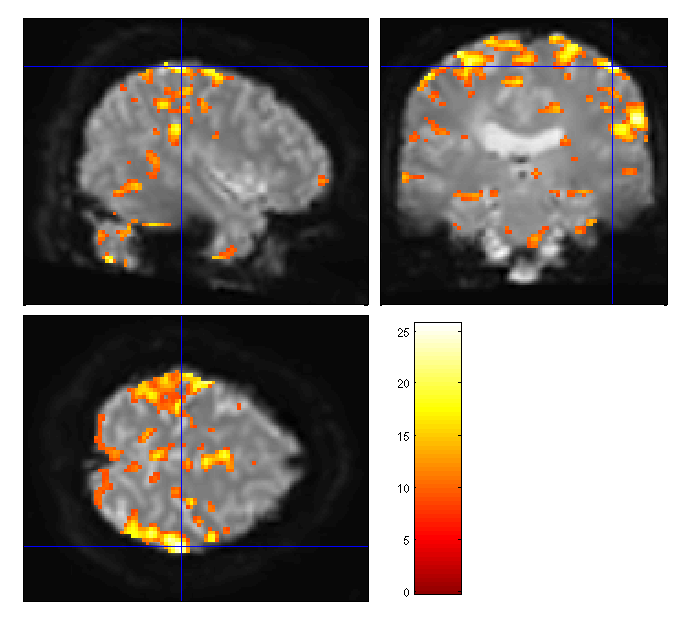
Before and after the two months of autonomous usage by the participants in this protocol, the brain activity generated by using the device was recorded in EEG and fMRI sessions. These results are being processed. An example of the pathological cortical activations related to voluntary attempts at paretic hand opening by the post-stroke participants can be found in Fig. 12
8.3.3 GRASP-IT
Participants: Ronan Le Guillou [CHU Toulouse], Christine Azevedo, David Gasq [CHU Toulouse, France], Lucas Fonseca.
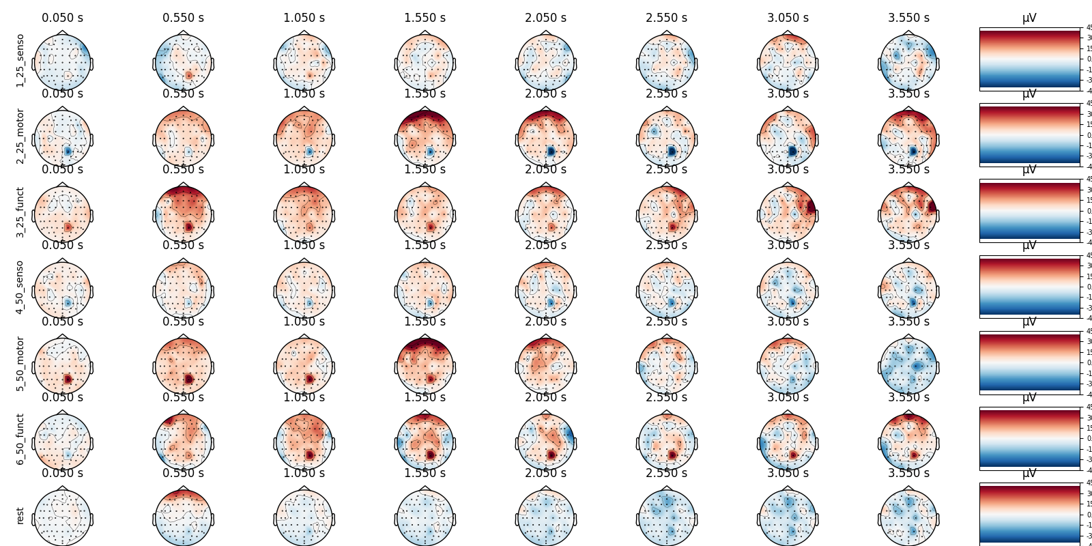
The GRASP-IT project is dedicated to addressing the challenges faced by stroke survivors in generating pertinent kinesthetic motor imagery (KMI) for rehabilitation therapy. The project's overarching objectives encompass the comprehensive assessment of user requirements, as well as the usability and acceptability of the innovative GRASP-IT device. This device incorporates diverse feedback modalities, including sensory and motor functional electrical stimulation (FES), as well as tactile/kinesthetic and tangible interfaces, within a gamified therapeutic framework. Users engage with physical devices, such as wearable, 3D-printable orthoses, via a Brain-Computer Interface (BCI) (Fig. 13). Within the CAMIN team, our primary focus is on investigating the impact of FES on BCI signals during KMI. To achieve this, we conducted Electroencephalography (EEG) data collection sessions with 12 able-bodied subjects performing a wrist extension task, accompanied by randomized FES applied to their wrist extensors. The FES protocols encompassed various intensity levels, including the absence of stimulation, sensory, and motor intensities. Each session recorded approximately 30 minutes of EEG activity across 32 channels. Currently, the acquired data is undergoing thorough analysis (see Fig. 14).

8.3.4 ORTHYB: an assistive hybrid orthosis for upper limb function
Participants: Clément Trotobas, Christine Azevedo, Fernanda Rodrigues Ferreira Lopes, Henrique Resende Martins [UFMG, Belo Horinzonte, Brazil/Associate team GOIABA].
We have developed a new approach to assisting prehension by combining functional electrical stimulation (FES) and a motorized orthosis (Fig. 15). The aim was to induce movements of the fingers and wrist joints by activating the muscles using FES and locking the joints in the desired positions using electric motors, in order to reduce muscle fatigue and enable prolonged grasping of objects. Another hypothesis was that the mechanical orthosis would improve grip quality by constraining joint positioning and guiding hand movements. The hybrid orthosis combined electrical stimulation of the extensors and flexors of the fingers, thumb and wrist muscles with a mechanical structure equipped with low-power motors to accompany the movements induced by the stimulation and maintain the position thus achieved by the passive properties of the motors 28.
The clinical protocol was approved by the Ethics Committee of the Federal University of Minas Gerais (CAAE Registration: 53757521.3.0000.5149). Five participants with spinal cord injury were recruited from rehabilitation centers and hospitals in Belo Horizonte, Minas Gerais, Brazil, and through dissemination of the research on social media. The prototype was tested by the 5 participants, comparing the grasping of 3 objects (ball, fork, bottle) with the ORTHYB solution with that achieved through functional electrical stimulation alone. The evaluation was carried out by monitoring the quality of grip for 30 seconds on 3 different objects; perceived effort using the Borg RPE (Rating of Perceived Exertion) scale; the visual analog scale (VAS); acceptability using the QUEST (Quebec User Evaluation of Satisfaction Technology with Assistive Technology) scale and the SUS (System Usability Scale) were applied. Results indicate that the orthosis provides added value compared to FES alone. Object grasping is possible for 30 seconds without muscular fatigue affecting the grip. Yet, the prototype will have to be improved to reach an acceptable level of usability.
The ORTHYB consists of the main controller (GUI in the center) which accepts input control signal from a switch button to control the 2 motor controllers of the mechanical orthosis and the 3 stimulation channels of electrical stimulator.
B. Lower-limb function restoration
8.3.5 FES-Induced pedaling optimization through real-time fatigue compensation for individuals with Spinal Cord Injury
Participants: Tiago Coelho Magalhaes, François Bailly, Christine Azevedo.
In this project, we use trajectory optimization to simulate the application of Functional Electrical Stimulation (FES) in assisting individuals with spinal cord injuries (SCIs) and other neurological impairments to perform functional activities such as cycling. The framework is based on the biorbd rigid-body dynamics library and benefits from the algorithmic differentiation provided by CasADi. It interfaces both Ipopt and Acados solvers for solving optimal control problems (OCP) in biomechanics. Using trajectory optimization (direct multiple shooting), we hypothesized that it was possible to achieve a more efficient application of electrical stimulation, while evaluating biomechanical constraints and exploring stimulation patterns aligned with individualized settings. Therefore, it will be possible to address problems such as determining when each muscle should be activated in the pedaling cycle, achieving more efficient electrical charge expenditure, etc.
In this sense, our approach involves integrating biomechanics and optimal control techniques to optimize the stimulation patterns during the activity. The primary goal is to develop new control laws that adapt electrical stimulation parameters based on the subject's muscular state. We aim to address challenges associated with the reversed order of muscle fiber recruitment caused by electrically evoked contractions coupled to muscle atrophy and increased fatigue that hinders prolonged pedaling.
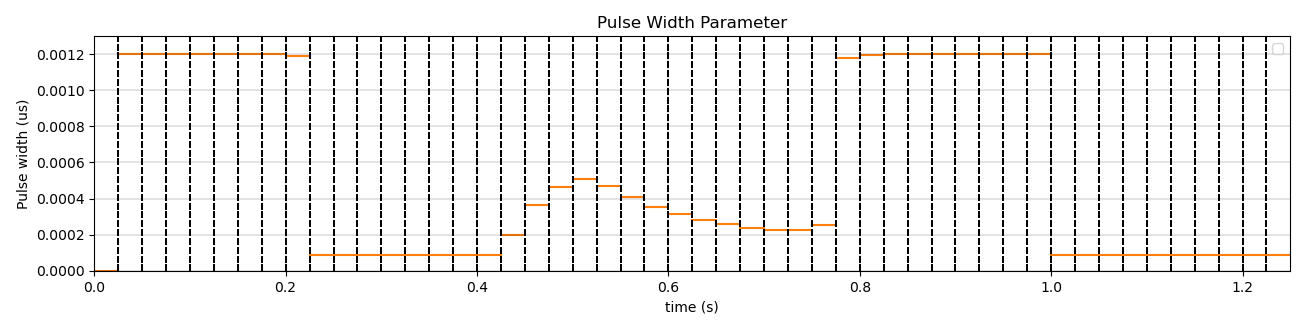
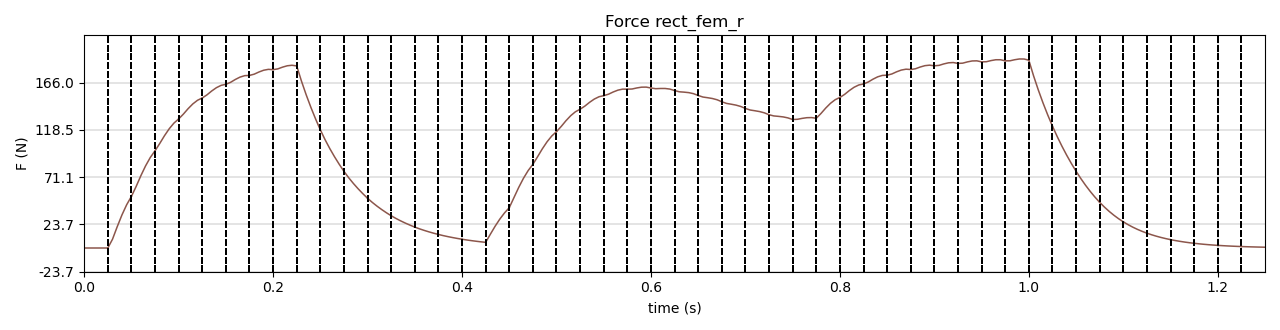
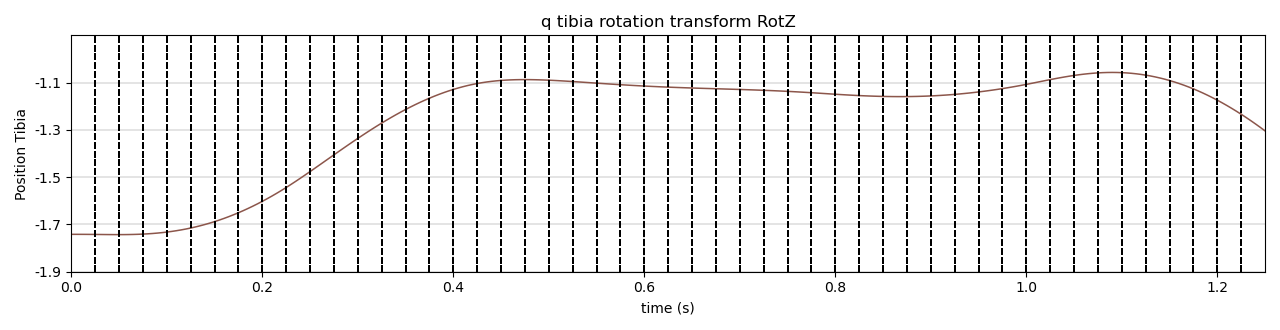
For synthesizing the optimal stimulation pattern, we chose to first optimize the pulse width while minimizing the joint trajectory tracking errors and the activation of the two antagonistic muscles. The goal was to find the control input that minimizes a cost function subject to dynamic and boundary constraints. In Bioptim, the mathematical transcription of the OCP is as follows:
In a brief, the optimization variables are the states (), controls () and parameters (). They represent the state of the system at each node subject to continuity constraints, the control variables at each node that drive the system, and optimization variables, respectively. The cost function can include Lagrange terms (functions are integrated over the duration of the phase) and Mayer terms (function are evaluated at one node).
For demonstration (Fig. 16), we show the results of a basic example where the objective was to perform an optimal reaching task with a one muscle (rectus femoris) and one degree of freedom (knee joint) model. The shank was supposed to reach a marker placed upward in front while minimizing the muscles activity and optimize the pulse width value.
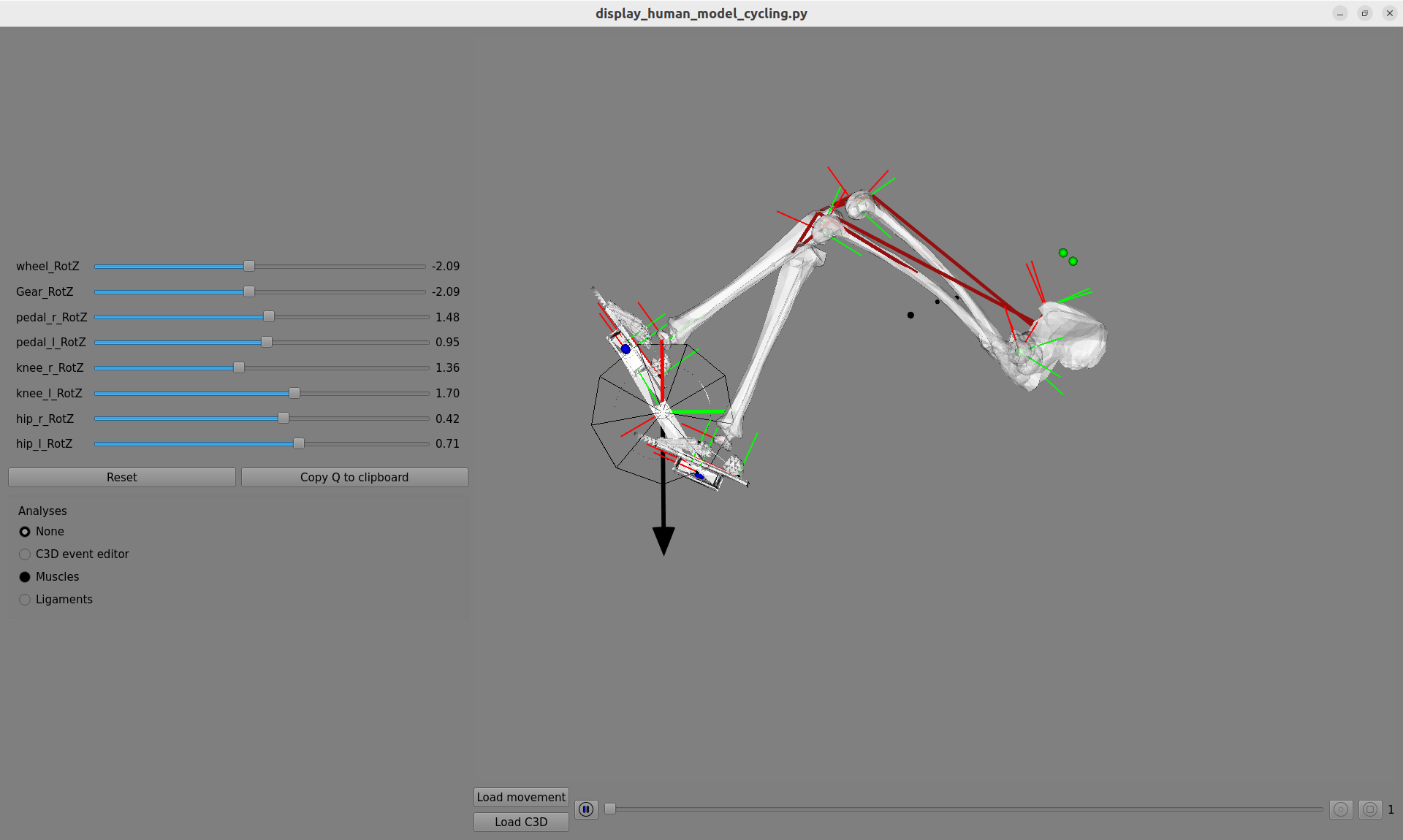
Now, our actual objective is to evaluate the electrically evoked muscle activity and optimize the stimulation pattern in more complexes scenarios, for instance, during the FES-cycling modality (Fig. 17). We believe that this research will significantly contribute to the achievement of more efficient application of electrical stimulation during FES-assisted cycling activities by synthesizing the optimal stimulation patterns, therefore providing valuable insights into designing protocols tailored to the specific needs of individuals with SCIs, ultimately enhancing their motor function and overall quality of life.
We believe that this research will significantly contribute to personalized rehabilitation approaches and facilitate the achievement of more efficient use of FES, therefore providing valuable insights into designing protocols tailored to the specific needs of individuals with SCIs, ultimately enhancing their motor function and overall quality of life.
8.3.6 RESCUEGRAPH: controlling electrical stimulation to elicit gait patterns in rat model
Participants: François Bailly, Christine Azevedo, Sam Durand.
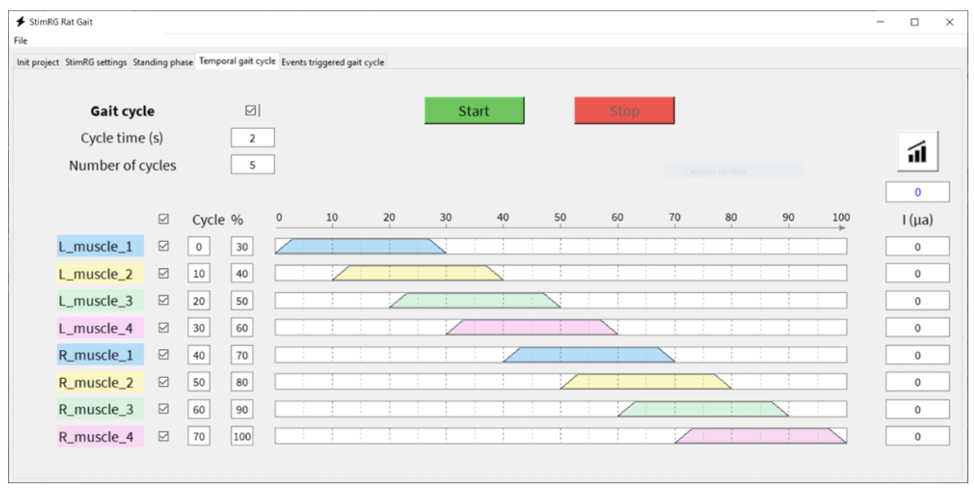
Within RESCUEGRAPH project, the software StimRG Rat Gait was developed to define cyclic stimulation patterns for controlling the rat gait pattern (Fig. 18). This graphical user interface (GUI) interacts with the electrical stimulator developped by NEURINNOV company through its API. The software was successfully tested during preliminary experiments at UAB (Barcelona, Spain) in June 2023.
C. Towards new designs for assistive devices
8.3.7 Novel design for a prono-supination orthosis
Participants: Clément Trotobas, Christine Azevedo, Andrew Murray [DimLab, University of Dayton (Ohio), USA].
The goal of this project is to imagine a novel light and wearable orthotic solution for pronation and supination movement assistance. The objective is to give functional mobility to paralyzed forearms. The main complexity of this kind of device is to induce a rotational movement at the wrist according to the elbow without being inside the body space and with minimized spatial encumbrance.
Initial work in the design of a mechanism for a portable assistive orthosis is expected to include powered prono-supination. The component proposed in this work is based on a spherical mechanism architecture. The capacity of these mechanisms to have a hollow center and to produce paths that follow arcs on spheres make them worth consideration in this application. A MATLAB optimization was used to perform path generation of a single spherical four-bar with the intent of replicating it three times to create the device proposed in this work. The concept was modeled in SOLIDWORKS and printed to gauge its potential (Fig. 19). Input parameters are the inner radius (space for the forearm) and the length. They define the range of motion of the rotation. Activities of daily living require a range of motion of for the prono-supination movement. Reaching this criteria requires stacking two layers of three mechanisms - the top ring of the first layer being the bottom ring of the second layer (Fig. 20)- enabling a rotation. This means a forearm orthosis would require 3 x 2 actuators which seems not compatible with a wearable device. This work was initiated during the stay of Andrew Murray as invited researcher in the team (Labex Numev support). The current work is to reduce the number of actuators required for such device by slaving spherical mechanims among layers and potentially between layers.
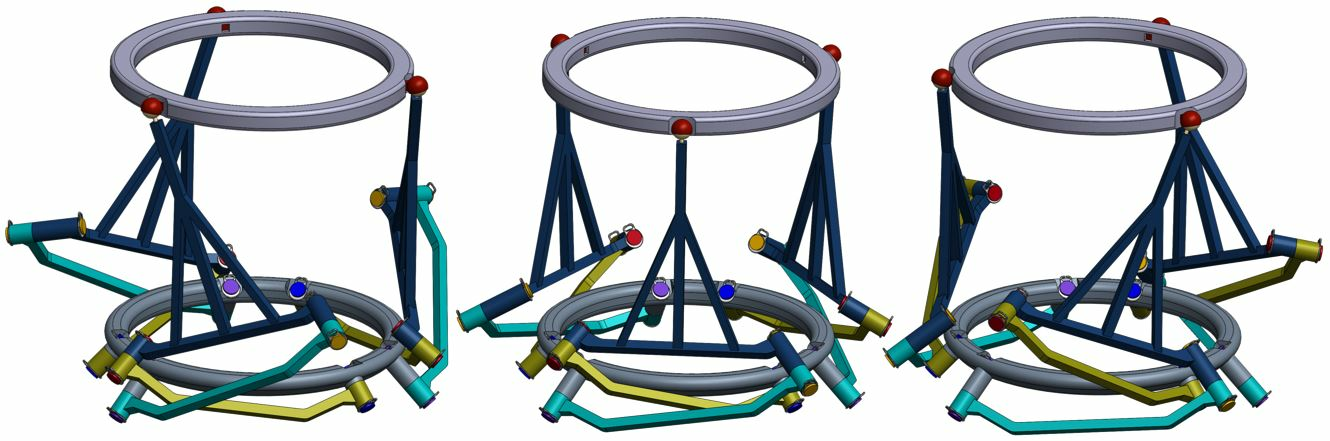
3 positions of the solidworks model of the orthosis.
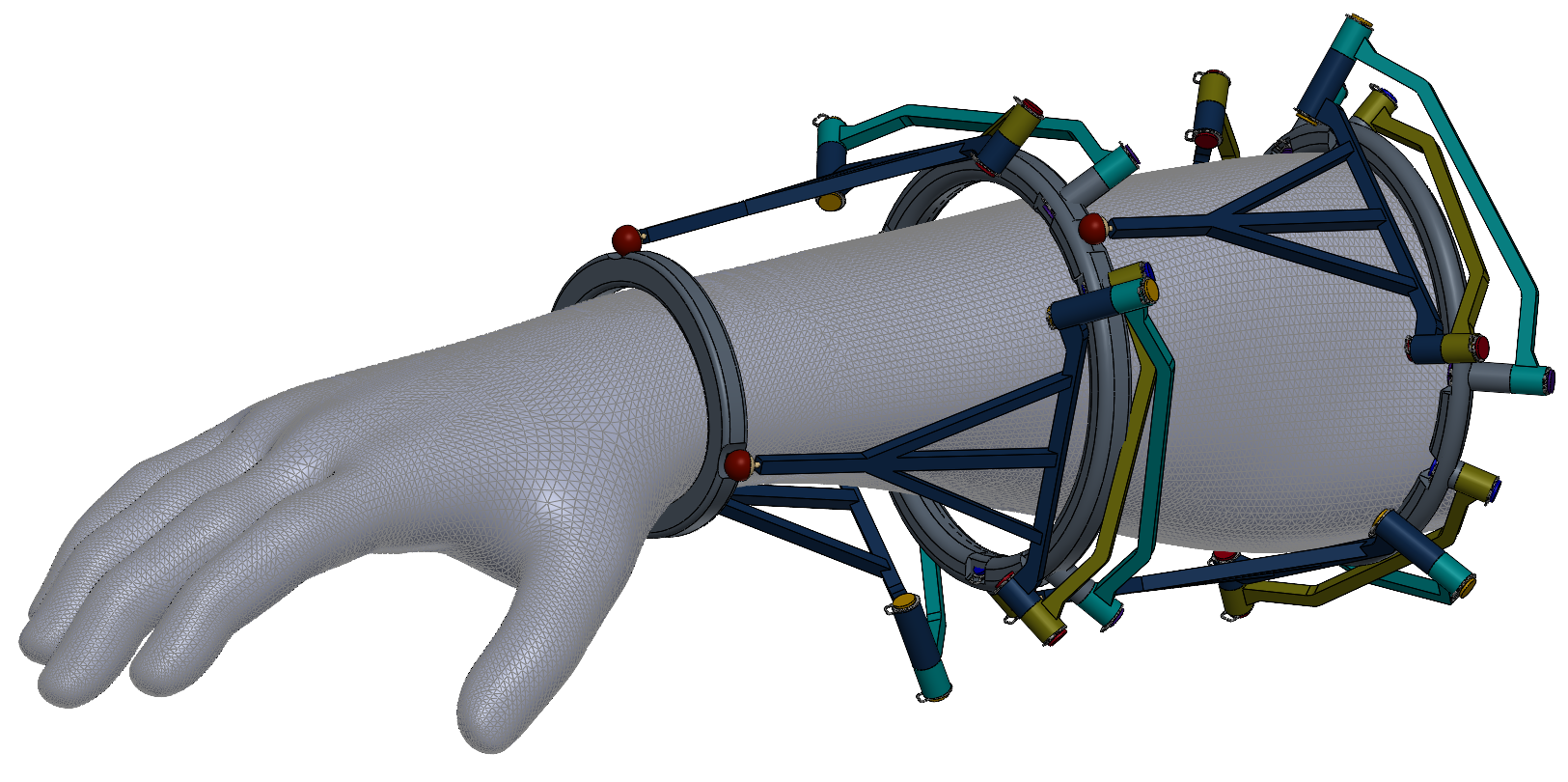
Solidworks model representing the orthosis wrapped around the forearm
8.3.8 Active knee orthosis for rehabilitation
Participants: Laurence Colas [REEV], Christine Azevedo, François Bailly.
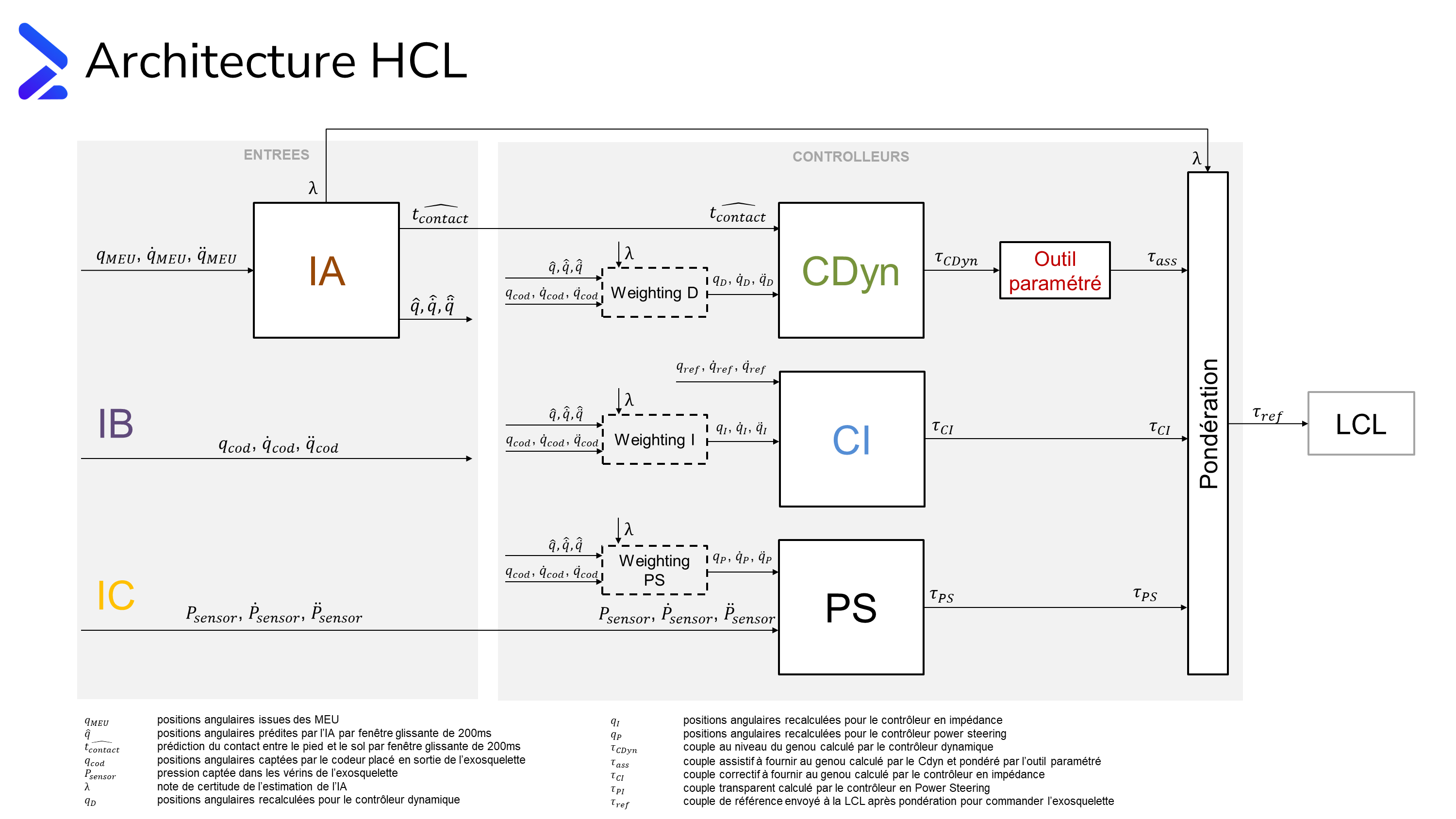
The project started in September 2022 in the form of a PhD thesis in collaboration with the REEV company, on the design and control of a walking assistance exoskeleton at the knee (Fig. 21). The particularity of REEV's device comes from its ability to work in concentric and eccentric modes both during flexion and extension. This is allowed thanks to its optimized hydraulic actuators.
This year, the work was mainly focused on finalizing the mechanical optimization of the orthosis transmission prototype that will be used for the first trials on healthy users and on patients suffering from light walking disabilities. That part was very challenging due to manufacturing issues but the prototype is essential for experimental purposes.
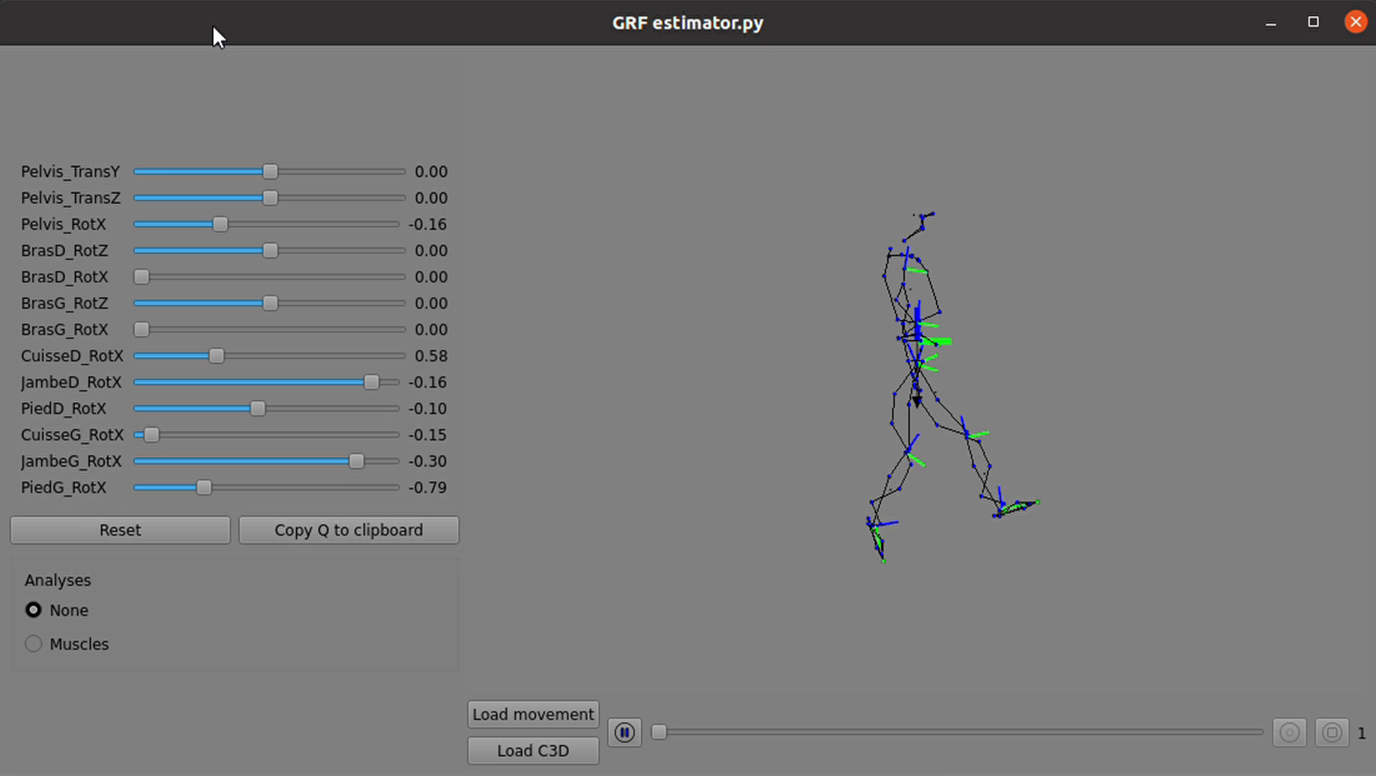
The second part of the project is to develop the assistive sub controller of the high level control law. This includes building a biomecanichal model of the patient (Fig. 22) and applying inverse dynamics to this model in order to deduced the external forces acting on the model and the torques applied on each joint depending on the position of the user.
8.3.9 Opticycle: Optimally designed tricycle for FES-Induced pedaling in patients with Spinal Cord Injury
Participants: Sabrina Otmani, François Bailly, Andrew Murray [Dimlab, Dayton (Ohio), USA], Christine Azevedo.
The objective of the OPTICYCLE project is to improve the performance of FES assisted pedaling by co-optimizing the design of the tricycle and the FES control law, in accordance with the biomechanical capabilities of the patient. So far, we have conducted numerical optimization on the adjustable parameters of the tricycle using literature-derived surfaces of maximum joint torques varying with joint position and velocity 23. In simulation, this approach allows us to maximize the power recovered at the crank by changing the geometry of the tricycle, for an able-bodied rider, at constant speed. In a second step, we will generalize this approach to FES-stimulated patients (scaling of the torque surfaces) and we will co-optimize the FES control law. We aim to achieve the most efficient possible combination of tricycle and control law to delay the apparition of fatigue and let the patient ride the system for larger periods of time (aiming to attend the 2024 Cybathlon).
Our research focuses on optimizing tricycle architecture by modeling three distinct design variations, ranging from the simplest (TRT - Traditional Recumbent Tricycle) to the most intricate configurations (CDT - Coupler Driven Tricycle). Our findings highlight the transformative potential of data-driven optimization, particularly in leveraging real joint torque information and anthropometric data extracted from studied subjects.
The optimization is based on the maximization of power transmitted to the crank. Grashof constraints are used to ensure the system's kinematic feasability. The knee and hip angular positions are enforced in the domain defined in the literature. Additional options can be chosen to specify some parameters of the optimization (maximum iterations, tolerance, etc).
This approach enhances tricycle efficiency by personalizing the model based on the user's anthropometry (Fig. 23). This is especially beneficial for individuals with limited ankle joint mobility or motor disorders. Through meticulous integration of this data into the design process, we iteratively refine key parameters such as frame geometry, back inclination, and crank velocity.
The overarching goal of our research is to maximize the output of the crank while preserving the ankle (which is considered without any mobility), ultimately enhancing tricycle performance and user satisfaction. Our final objective is to integrate an optimized tricycle design with FES-Induced pedaling optimization. This involves real-time fatigue compensation for individuals with Spinal Cord Injury, providing a comprehensive solution for improved mobility and user experience.
9 Bilateral contracts and grants with industry
9.1 Neurinnov
Participants: Jonathan Baum, Thomas Guiho, David Guiraud, Christine Azevedo.
NEURINNOV startup finances half of the PhD thesis salary of Jonathan Baum (from December 2023 - PLASTICISTIM Project).
A convention was signed with Neurinnov for David Guiraud to join the team as a collaborator.
9.2 REEV
Participants: Laurence Colas, François Bailly, Christine Azevedo.
REEV startup obtained a CIFRE grant to finance the PhD of Laurence Colas (started in October 1st 2022).
10 Partnerships and cooperations
Participants: Christine Azevedo-Coste, François Bailly, Jonathan Baum, François Bonnetblanc, Sam Durand, Charles Fattal, Gabriel Graffagnino, Thomas Guiho, David Guiraud, Ronan Le Guillou, Tiago Coelho Magalhaes, Valentin Maggioni, Etienne Moullet, Sabrina Otmani, Olivier Rossel, Felix Schlosser-Perrin, Clotilde Turpin.
10.1 International initiatives
10.1.1 Inria associate team not involved in an IIL or an international program
- BrEl-Mapping: France-Japan Inria associated team website. PI: François Bonnetblanc and Pr Riki Matsumoto (Kobe University Graduate School of Medecine). This team focuses on the methodological aspects of measuring brain potentials evoked by electrical stimulation with two complementary approaches. Prof Matsumoto has gained a worldwide reputation for the study of distant CCEPs in epileptic patients. We have developed more specific expertise in the collection and analysis of ACEP during tumor surgery.
- GOIABA: Brazil-France associated team website. PI: Christine Azevedo and Henrique Resende Martins. The team involves researchers from Federal University of Minas Gerais (UFMG) and Universidade de Brasília (UnB) in Brazil as well as Centre Bouffard-Vercelli USSAP Perpignan in France. The research carried in GOIABA considers approaches to motor assistance that combine mechatronic systems and functional electrical stimulation (FES). The use of FES in interaction with an instrumented tricycle for instance allows people with spinal cord injuries to pedal. FES can also be combined with orthoses, in particular for the upper limb. Our aim is to develop a collaboration to optimize the outcomes of hybrid mechatronic devices in the context of functional rehabilitation.
10.1.2 Other international collaborations
François Bailly has a strong partnership with Université de Montréal (S2M lab) around the development of the Bioptim software and the work of several PhD students and postdoc researchers.
10.2 International research visitors
Other international visits to the team
Prof. Henrique Resende Martins (Federal University of Minas Gerais (UFMG), Brazil) visited CAMIN team during 1 week in December 2023 within GOIABA associate team. He was accompanied by a Master student.
10.2.1 Visits to international teams
Research stays abroad
Christine Azevedo spent 2 weeks in November 2023 in Federal University of Minas Gerais (UFMG), Brazil within GOIABA associate team. 5 participants were included in ORTHYB protocol and 3 experimental sessions with each of them realized.
10.3 European initiatives
10.3.1 Horizon Europe
AI-HAND
AI-HAND project on cordis.europa.eu
-
Title:
Advanced Intelligent stimulation device: HAND movement restoration
-
Duration:
From August 1, 2023 to February 28, 2027
-
Partners:
- INSTITUT NATIONAL DE RECHERCHE EN INFORMATIQUE ET AUTOMATIQUE (INRIA), France
- CORTEC GMBH (CORTEC), Germany
- ALBERT-LUDWIGS-UNIVERSITAET FREIBURG (ALU-FR), Germany
- NEURINNOV, France
- UNION SANITAIRE ET SOCIALE POUR L'ACCOMPAGNEMENT ET LA PREVENTION (USSAP), France
- CENTRE NATIONAL DE REEDUCATION FONCTIONNELLE ET DE READAPTATION, Luxembourg
-
Inria contact:
Christine Azevedo
-
Coordinator:
Christine Azevedo , INRIA
-
Summary:
Very advanced stimulation paradigms applied to peripheral nervous system (PNS) have been studied for years even decades among which the 3D current distribution through multi-contact epineural electrodes. Non rectangular stimulus waveforms are also of strong interest to provide more efficient or fibre type selective stimulation. However none were implemented in an Active Implanted Medical Device and thus almost none validated through clinical trials. One of the reasons is the high complexity of the needed analogue front end and its safe control by a microcontroller or a digital system. AI-HAND project aims at developing a breakthrough, ASIC based technology, together with a specific self adapting epineural multi contact electrode to provide such an AIMD. The demonstration of the clinical relevance of such an approach will be achieved through a first-in-man proof of concept aiming at the restoration of hand movements in persons with complete quadriplegia. It means that a full innovative device should be developed and validated in animals, but the real added value will be supported by the clinical trial; indeed, no animal model exists while the clinical needs is clearly stated by clinicians and patients. Thus this project will innovate concerning both the technology and the therapeutic approach with a minimally invasive concept. Indeed, spatial selectivity allows to stimulate nerves selectively targeting muscles through 3D currents shaping instead of implanting one electrode per muscle. The technology clearly addresses generic issues so that the paradigms and the innovative technology can be further used to stimulate the central nervous system (spinal cord and brain) and, on a long term basis, may drastically open new therapeutics for medical needs that are still unmet.
10.3.2 H2020 projects
RESCUEGRAPH FLAG-ERA JTC(2021-24) The RESCUEGRAPH project aims at using graphene-based flexible electrodes as the neural interface of a FES system to reproduce and allow rehabilitation of gait and, at the sametime, to drive neuroplasticity at spinal and brain levels to enhance functional recovery of mo-tor and somatosensory processing after SCI. Partners: Universitat Autonoma de Barcelona(Spain), Fundacio Institut Catala de Nanociencia i Nanotecnologia (Spain), Bogazici University (Turkey), Neurinnov (France)
10.4 National initiatives
INRIA-INSERM Phd thesis grant (2023-26)
We obtained a grant to finance the PhD thesis of Gabriel Graffagnino between CAMIN and INSERM Tonic team in collaboration with Institut Saint Pierre (Palavas)
ANR Grasp-It (2019-24)
Design and evaluation of a tangible and haptic BCI for upper limb rehabilitation after stroke. The project aims to recover upper limb control improving the kinesthetic motor imagery (KMI) generation of post-stroke patients using a tangible and haptic interface within a gamified Brain-Computer Interface (BCI) training environment.
ARC FOUNDATION for Research Against Cancer (2022-2025)
Guiding brain tumor surgery in real time using electrophysiology (collaboration with Pr Hugues Duffau and Pr Emmanuel Mandonnet). During the resection of brain tumors, the neuro-surgeon has substantial imaging data allowing him/her to plan his/her gesture upstream. However, during the actual surgical gesture, in real time, this imaging becomes ineffective due to the deformation of the brain (so called brain shift). It is then possible to use direct electrical stimulation of the brain in an awake patient who cooperates with the neurosurgeon to determine the functional areas and those which are not. When patients are under general anesthesia this possibility no longer exists. We have planned to use the electrophysiology evoked by the DES of the brain during brain surgery to diagnose and determine the location the tumor and the anatomical connectivity on-line in order to guide the surgery in awake patients or under general anesthesia. This needs to go beyond the proof of concept, we have alrealdy performed, and necessitates to address and solve some methodological challenges. At a fundamental level, this will also help to better understand the electrophysiological effect of DES in order to optimize its use.
BAYFRANCE (France Bavaria) (2022-2023)
Collaboration and exchange with Pr Andréa Szélenyi, Munich Hospital on the theme of brain evoked potentials and their use in Neurosurgery.
LABEX NUMEV thesis co-funding (2021-2024)
Additional funding through an agree-ment with the APHP (Paris) and Pr Emmanuel Mandonnet. Felix Schlosser-Perrin thesis.
AGILISTIM-SITE MUSE grant - Soutien a la recherche (2021-23)
AGILISTIM proposes to implant 3 epineural electrodes around the median, radial and ulnar nerves, just above the elbow of volunteer participants with complete tetraplegia for 30 days. The multi-contact neural stimulation will synergistically activate the forearm muscles to trigger: hand opening, a digito-palmar grip or a functional terminal grip. The project must consolidate and extend the scientific results of the previous work and the innovative technologies which result from it. It should allow to reach a crucial proof-of-concept stage before the development of a unique finalized product responding to an unsolved need in order to improve the quality of life and the autonomy of the users.
Human Lab Inria (HLI) (2021-24)
Exploratory Research Action.
10.5 Regional initiatives
OPTICYCLE (2023-2024)
Occitanie region's Défi Clef Robotique centrée sur l'humain finances the postdoc of Sabrina Otmani.
PLASTICISTIM (2023-2026)
Occitanie region's EMERGENCE call for projects finances half of the PhD thesis salary of Jonathan Baum (PLASTICISTIM Project).
The PLASTICISTIM project can be described as a complementary initiative to the AI-Hand project. Its aim is to study the benefits of combining peripheral nerve stimulation (PNS) - as investigated in AI-Hand - with spinal cord stimulation (SCS) for restoring motor function in spinal cord injured individuals. The aim of this combination is to potentiate the direct restoration of motor function enabled by PNS with a progressive refinement of movements due to SCS. Indeed, recent studies attest to the impact of SCS in facilitating the passage of degraded voluntary commands and also in the progressive restoration of motor functions (following long-term clinical trials combining SCS and physical rehabilitation exercise). Actually, the literature does not reference any study exploring this combination and the aim of the PLASTICISTIM project, which should be seen as a proof of concept, is to pave the way for a new therapeutic approach enabling the restoration of numerous functions in people with spinal cord injuries. PLASTICISTIM is the topic of Jonathan Baum's PhD thesis - which started in December 2023 - and will be based on alternating phases of in vivo exploration (on large animals - pigs) and biosignals processing. The project is currently at the literature survey stage, but should be based on transcutaneous SCS in order to benefit from its ease of access, low cost and non-invasive nature.
11 Dissemination
Participants: Christine Azevedo-Coste, François Bailly, Jonathan Baum, François Bonnetblanc, Charles Fattal, Lucas Fonseca, Gabriel Graffagnino, Thomas Guiho, David Guiraud, Ronan Le Guillou, Tiago Coelho Magalhaes, Valentin Maggioni, Etienne Moullet, Sabrina Otmani, Olivier Rossel, Felix Schlosser-Perrin, Clotilde Turpin.
11.1 Promoting scientific activities
11.1.1 Scientific events: organisation
Member of the organizing committees
- Christine Azevedo was member of the organizing committee of IFESS at RehabWeek 2023 (Singapour).
- François Bailly was organizer of an invited workshop on trajectory optimization in biomechanics at the 18th International Symposium on Computer Methods in Biomechanics and Biomedical Engineering in Paris, 2023.
11.1.2 Scientific events: selection
Reviewer
- Christine Azevedo participated in the Researchers with disabilities 2023 campaign
11.1.3 Journal
Member of the editorial boards
- Christine Azevedo is member of the International Functional Electrical Stimulation Society (IFESS) society board.
- Christine Azevedo is member of editorial boards of Frontiers in Neurology and Frontiers in Neuroscience and associate editor for Institute of Electrical and Electronics Engineers Robotics and Automation Letters (IEEE RA-L) and IEEE EMBC (Engineering in Medicine and Biology Society) (Theme 6).
- Christine Azevedo and Lucas Fonseca are Guest Editors in Sensors Special Issue "Sensors for Artificial Movement Control".
Reviewer - reviewing activities
- Christine Azevedo was reviewer for IEEE TNSRE (Transactions on neural systems and rehabilitation engineering), SENSORS MDPI, Frontiers in Neurorobotics Frontiers in Neuroscience, Journal of NeuroEngineering and Rehabilitation...
- Thomas Guiho was reviewer for Journal of Neural Engineering, Neuromodulation: Technology at Neural Interface, Neurophysiologie Clinique...
- François Bailly was reviewer for IEEE Robotics and Automation Letters (IEEE RA-L), IEEE Intelligent Robots and Systems (IROS), IEEE International Conference on Robotics and Automation (ICRA), Medical & Biological Engineering & Computing...
- Tiago Coelho Magalhaes was reviewer for Research on Biomedical Engineering.
- Olivier Rossel was reviewer for Journal of Neural Engineering, Medical & Biological Engineering & Computing.
11.1.4 Invited talks
- Master class g.tec "BCI & NEUROTECH MASTERCLASS FRANCE" 19 septembre 2023 (link): François Bonnetblanc, Olivier Rossel, Félix Schlosser-Perrin France
- Inomed user meeting 28 novembre 2023: François Bonnetblanc, Emmendingen, Germany
- Journées nationales de la robotique humanoïde, François Bailly, 5-7 juillet 2023 Bordeaux (France).
- Christine Azevedo presented AGILIS project during INRIA Sciendific Days JSI in August 2023 (Bordeaux).
- Christine Azevedo presented HumanLab HLI actions during a workshop about accessibilité at INRIA Rennes in October 2023.
- Christine Azevedo presented FREEWHEELS project during the European Week for the Employment of People with Disabilities (SEEPH) in November 2023 (INRIA Sophia Antipolis).
11.1.5 Research administration
- Thomas Guiho is responsible for the “Neuroprostheses” teaching unit. This unit is an option common to all the masters of the Information and Communication Technologies (ICT) for health training package.
- Thomas Guiho was part of the pool of session secretaries for the Sophia Antipolis project-team committees until September 2023.
- François Bailly is part of the pool of session secretaries for the Sophia Antipolis project-team committees since October 2023.
- François Bailly is a member of the NICE committee (postdoc selection).
- Christine Azevedo is a member of COERLE (Inria Comité d’éthique)
- Christine Azevedo is a member of projects committee office (BCEP)
- Christine Azevedo and Roger Pissard-Gibollet (SED Grenoble) coordinate the HumanLab Inria action project.inria.fr/humanlabinria
11.2 Teaching - Supervision - Juries
11.2.1 Teaching
- Master ICT for Health, Neuroprostheses option: Thomas Guiho, “Neuroanatomy and Motor Control”, 6h, M1, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Ronan Le Guillou, “Control basics and signal processing”, 10.5h, M1, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Olivier Rossel, “Modeling of the peripheral nervous system”, 6h, M1 and M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Felix Schlosser-Perrin, “Electrophysiological mapping during awake brain surgery”, 3h, M1, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Charles Fattal, “Neuroprosthesis and motor support strategies after spinal cord injuries”, 3h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Sabrina Otmani, “Strategies of control”, 3h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Jonathan Baum, “Signal processing of neural signals”, 3h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Clotilde Turpin, “Activating Function”, 9h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Gabriel Graffagnino, “Sensory supplementation: overview and prospects”, 1.5h, M2, Montpellier University, France
- Master ICT for Health, Neuroprotheses option: Valentin Maggioni, “Biomaterials and biocompatibility”, 1.5h, M2, Montpellier University, France
- Master Cognitive and integrated neuroscience, "Sensorimotor Deficiencies and palliative strategies teaching unit": Thomas Guiho, “Implantable neuroprosthesis for motor rehabilitation”, 4.5h, M2, Paul Sabatier University, Toulouse, France
- Master Health, "Integrated Pathophysiology": Thomas Guiho, “Neuroprosthesis and Robots for motor replacement”, 4.5h, M2, Montpellier University, France
- Master clinical neuropsychology in adults, "Cognitive rehabilitation and contributions of new technologies": Ronan Le Guillou, “New technologies for rehabilitation after cognitive impairements”, 3h, M2, Jean Jaurès University, Toulouse, France
- Engineering degree, "Microelectronics and automation": Oliver Rossel, “Discrete event system”, 30h, 4th year, Polytech Engineering School, Montpellier, France
- Master ICT for Health, "Health device engineering": David Guiraud, “Regulatory pathway for Medical Devices under the new regulation MDR 2017/745”, 12h, M1, Montpellier University, France
- Master in Sport, Education and Healthcare, "Science, Technology, Movement": David Guiraud, “Electrophysiology of movement, Basics in Electrophysiology of movement”, 6h, M2, Montpellier University, France
- Master in Pharmaceutical Sciences, "Neuroprosthesis": Félix Schlosser-Perrin, “Signal processing and basic electronics”, 64h, L1, Montpellier University, France
11.2.2 Supervision
- PhD defended on June 19th 2023: Lucie William, "Selective implanted neural stimulation to recover the prehension for quadriplegic", University of Montpellier-Inria-NEURINNOV, october 2019-June 2023, supervised by David Guiraud and Christine Azevedo
- PhD defended on August 28th: Clément Trotobas, "Design of arm assistive technologies", University of Montpellier-Inria-Dayton University, september 2020-september 2023, supervised by Christine Azevedo and Andrew Murray (Dayton Univ)
- PhD defended on December 19th: Ronan Le Guillou, "Design of a wearable neuroprosthetic solution for arm rehabilitation in post-stroke hemiplegia", University of Montpellier-Inria-CHU Toulouse, December 2020-December 2023, supervised by Christine Azevedo and David Gasq (CHU Toulouse)
- PhD in progress : Félix Schlosser-Perrin (2021-...), "Modélisation des effets électrophysiologiques de la stimulation électrique sur le cerveau et preuves expérimentales en chirurgie des tumeurs cérébrales : variation de l’intensité, de la distance inter-électrode et de la largeur du pulse de stimulation", University of Montpellier, september 2021-september 2024, supervised by François Bonnetblanc and Emmanuel Mandonnet (PU-PH in Neurosurgery at APHP)
- PhD in progress : Laurence Colas (2022-...) Développement, contrôle et validation d’un système mécatronique pour orthèse d’assistance des membres inférieurs. Thèse CIFRE - société REEV. Supervised by François Bailly and Christine Azevedo.
- PhD in progress : Clotilde Turpin (2022-...), "Variation des paramètres de la stimulation électrique directe dans le cadre de la chirurgie des tumeurs cérébrales: Typologie des réponses ", Inria, supervised by François Bonnetblanc.
- PhD in progress : Gabriel Graffagnino (November 2023-...) , " Apport des nouvelles technologies numériques dans la rééducation pédiatrique : stimulation électrique fonctionnelle, réalité virtuelle et robotique d’assistance dans la rééducation de la marche chez l’enfant atteint de paralysie cérébrale", Inria-INSERM-Institut St Pierre, supervised by Christine Azevedo, Benoît Sijobert, Karinne Patte and David Gasq.
- PhD in progress : Valentin Maggioni (November 2023-...), "Développement d'un simulateur neuromusculosquelettique du membre supérieur sous stimulation électrique fonctionnelle", University of Montpellier-Inria, supervised by François Bailly and Christine Azevedo.
- PhD in progress : Jonathan Baum (December 2023-...), "Precise neural stimulation and underlying electrophysiological mechanisms", University of Montpellier-Inria-NEURINNOV, supervised by Thomas Guiho, David Guiraud and Christine Azevedo.
- Internship : Alice Hernot, "Comparaison de systèmes de capture de mouvement : application à la main", Inria, March 2023-August 2023, supervised by François Bailly.
- Internship : Fanny Gerbet, March 2023-August 2023, "Links between electromyographic signals (EMGs) and evoked functional movements in the context of implanted peripheral nerve stimulation.", University of Montpellier-Inria, supervised by Thomas Guiho.
- Internship : Houssam Salama Alhandi (June 2023-August 2023), "Conduction velocity in long-range Axono-cortical evoked potentials (ACEP))", Inria, supervised by François Bonnetblanc.
11.2.3 Juries
Christine Azevedo was reviewer of the PhD thesis of KAJGANIC Petar ENS de Lyon in september 2023.
11.3 Popularization
11.3.1 Internal or external Inria responsibilities
- Thomas Guiho is the Montpellier referent for the "1 Chercheur, 1 Classe : Chiche!" programme.
- François Bailly is the Montpellier contact for the AGOS local management committee.
11.3.2 Articles and contents
AGILIS project was presented in several supports, here is a selection:
- MidiLibre Newspaper
- LUM university Montpellier Magazine
- Allo Docteurs website
- Mag Santé France 5 - Paralysie : Des électrodes pour retrouver de la mobilité
11.3.3 Education
Christine Azevedo gave an introduction to programming interventions using MICROBIT and MCQUEEN Robot in Collège Léon Cordas (4 sessions of 3 hours).
Christine Azevedo teached how to use Thymio Robot with 6-10 years old children to introduce programming to 6 teachers of Ecole Valfalis Montbazin (5 hours) .
11.3.4 Interventions
Christine Azevedo participated in Robotic Days organized by Agde High School in April 2023.
Christine Azevedo, Clotilde Turpin, Etienne Moullet, Tiago Coelho Magalhaes, Sabrina Otmani participated in Fabrikarium hackaton in June 2023 for HumanLab INRIA, in Palavas.
CAMIN team welcomed 1 week internships of 2 schoolchildren this year.
12 Scientific production
12.1 Major publications
- 1 articleActivating effective functional hand movements in individuals with complete tetraplegia through neural stimulation.Scientific Reports121December 2022, 16189HALDOI
- 2 articleElectrophysiological Mapping During Brain Tumor Surgery: Recording Cortical Potentials Evoked Locally, Subcortically and Remotely by Electrical Stimulation to Assess the Brain Connectivity On-line.Brain Topography: a Journal of Cerebral Function and Dynamics2020HALDOI
- 3 articleTraining with FES-assisted cycling in a subject with spinal cord injury: Psychological, physical and physiological considerations.Journal of Spinal Cord MedicineJuly 2018, 1-12HALDOI
- 4 articleImpact of direct epispinal stimulation on bladder and bowel functions in pigs: A feasibility study.Neurourology and Urodynamics371January 2018, 138-147HALDOI
- 5 articleSensory feedback restoration in leg amputees improves walking speed, metabolic cost and phantom pain.Nature Medicine259September 2019, 1356-1363HALDOI
- 6 articleEnhancing functional abilities and cognitive integration of the lower limb prosthesis.Science Translational Medicine11512October 2019HALDOI
- 7 articleA novel EMG interface for individuals with tetraplegia to pilot robot hand grasping.IEEE Transactions on Neural Systems and Rehabilitation Engineering2622018, 291-298HALDOI
- 8 articleCase report: remote neuromodulation with direct electrical stimulation of the brain, as evidenced by intra-operative EEG recordings during wide-awake neurosurgery.Clinical NeurophysiologyLetter to the editorNovember 2015, 1752-1754HALDOI
12.2 Publications of the year
International journals
International peer-reviewed conferences
Doctoral dissertations and habilitation theses
12.3 Other
Patents
12.4 Cited publications
- 23 articleMaximum voluntary joint torque as a function of joint angle and angular velocity: model development and application to the lower limb.Journal of Biomechanics40142007, 3105--3113back to text
- 24 articleActivating effective functional hand movements in individuals with complete tetraplegia through neural stimulation.Scientific Reports121December 2022, 16189HALDOIback to textback to text
- 25 articleMyoelectric control of upper limb prosthesis: current status, challenges and recent advances.Front Neuroeng742014, 7--9back to text
- 26 inproceedingsCosypose: Consistent multi-view multi-object 6d pose estimation.Computer Vision--ECCV 2020: 16th European Conference, Glasgow, UK, August 23--28, 2020, Proceedings, Part XVII 16Springer2020, 574--591back to text
- 27 inproceedingsProject MultiLeap: Fusing Data from Multiple Leap Motion Sensors.2021 IEEE 7th International Conference on Virtual Reality (ICVR)2021, 19-25DOIback to text
- 28 inproceedingsDevelopment of a hybrid orthosis solution to reduce fatigue during grasping.RehabWeekRotterdam (Netherlands)July 2022HALback to text
- 29 articleMediapipe hands: On-device real-time hand tracking.arXiv preprint arXiv:2006.102142020back to textback to text