

2024Activity reportProject-TeamPIXEL
RNSR: 202023565G- Research center Inria Centre at Université de Lorraine
- In partnership with:Université de Lorraine, CNRS
- Team name: Structure geometrical shapes
- In collaboration with:Laboratoire lorrain de recherche en informatique et ses applications (LORIA)
- Domain:Perception, Cognition and Interaction
- Theme:Interaction and visualization
Keywords
Computer Science and Digital Science
- A5.5.1. Geometrical modeling
- A5.5.2. Rendering
- A6.2.8. Computational geometry and meshes
- A8.1. Discrete mathematics, combinatorics
- A8.3. Geometry, Topology
Other Research Topics and Application Domains
- B3.3.1. Earth and subsoil
- B5.1. Factory of the future
- B5.7. 3D printing
- B9.2.2. Cinema, Television
- B9.2.3. Video games
1 Team members, visitors, external collaborators
Research Scientists
- Laurent Alonso [INRIA, Researcher]
- Etienne Corman [CNRS, Researcher]
- Nicolas Ray [INRIA, Researcher]
Faculty Members
- Dmitry Sokolov [Team leader, UL, Professor, until Aug 2024]
- Dmitry Sokolov [Team leader, UL, Professor Delegation, from Sep 2024]
- Dobrina Boltcheva [UL, Associate Professor]
PhD Students
- Tristan Cheny [DGA, from Nov 2024]
- Yoann Coudert-Osmont [UL, until Aug 2024]
- Mohamed-Yassir Nour [UL, ATER, until Aug 2024]
Technical Staff
- Benjamin Loillier [INRIA, Engineer]
Interns and Apprentices
- Aena Aria [INRIA, Intern, from Apr 2024 until Jul 2024]
- Lucas Aries [INRIA, Intern, from Jun 2024 until Jul 2024]
- David Dang [INRIA, Intern, from Jun 2024 until Aug 2024]
- Elyas Elaziz [INRIA, Intern, from Feb 2024 until Jun 2024]
- Jean-Baptiste Paquin [UL, Intern, from Feb 2024 until Apr 2024]
- Lucas Poirot [INRIA, Intern, from Mar 2024 until Jun 2024]
- Diego Riviere-Jombart [UL, Intern, from Feb 2024 until Apr 2024]
Administrative Assistant
- Emmanuelle Deschamps [INRIA]
External Collaborators
- David Lopez [Tessael, from Sep 2024]
- François Protais [SIEMENS IND.SOFTWARE, from Oct 2024 until Nov 2024]
2 Overall objectives
PIXEL is a research team stemming from team ALICE founded in 2004 by Bruno Lévy. The main scientific goal of ALICE was to develop new algorithms for computer graphics, with a special focus on geometry processing. From 2004 to 2006, we developed new methods for automatic texture mapping (LSCM, ABF++, PGP), that became the de-facto standards. Then we realized that these algorithms could be used to create an abstraction of shapes, that could be used for geometry processing and modeling purposes, which we developed from 2007 to 2013 within the GOODSHAPE StG ERC project. We transformed the research prototype stemming from this project into an industrial geometry processing software, with the VORPALINE PoC ERC project, and commercialized it (TotalEnergies, Dassault Systems, + GeonX and ANSYS currently under discussion). From 2013 to 2018, we developed more contacts and cooperations with the “scientific computing” and “meshing” research communities.
After a part of the team “spun off” around Sylvain Lefebvre and his ERC project SHAPEFORGE to become the MFX team (on additive manufacturing and computer graphics), we progressively moved the center of gravity of the rest of the team from computer graphics towards scientific computing and computational physics, in terms of cooperations, publications and industrial transfer.
We realized that geometry plays a central role in numerical simulation, and that “cross-pollinization” with methods from our field (graphics) will lead to original algorithms. In particular, computer graphics routinely uses irregular and dynamic data structures, more seldom encountered in scientific computing. Conversely, scientific computing routinely uses mathematical tools that are not well spread and not well understood in computer graphics. Our goal is to establish a stronger connection between both domains, and exploit the fundamental aspects of both scientific cultures to develop new algorithms for computational physics.
2.1 Scientific grounds
Mesh generation is a notoriously difficult task. A quick search on the NSF grant web page with “mesh generation AND finite element” keywords returns more than 30 currently active grants for a total of $8 million. NASA indicates mesh generation as one of the major challenges for 2030 45, and estimates that it costs 80% of time and effort in numerical simulation. This is due to the need for constructing supports that match both the geometry and the physics of the system to be modeled. In our team we pay a particular attention to scientific computing, because we believe it has a world changing impact.
It is very unsatisfactory that meshing, i.e. just “preparing the data” for the simulation, eats up the major part of the time and effort. Our goal is to change the situation, by studying the influence of shapes and discretizations, and inventing new algorithms to automatically generate meshes that can be directly used in scientific computing. This goal is a result of our progressive shift from pure graphics (“Geometry and Lighting”) to real-world problems (“Shape Fidelity”).
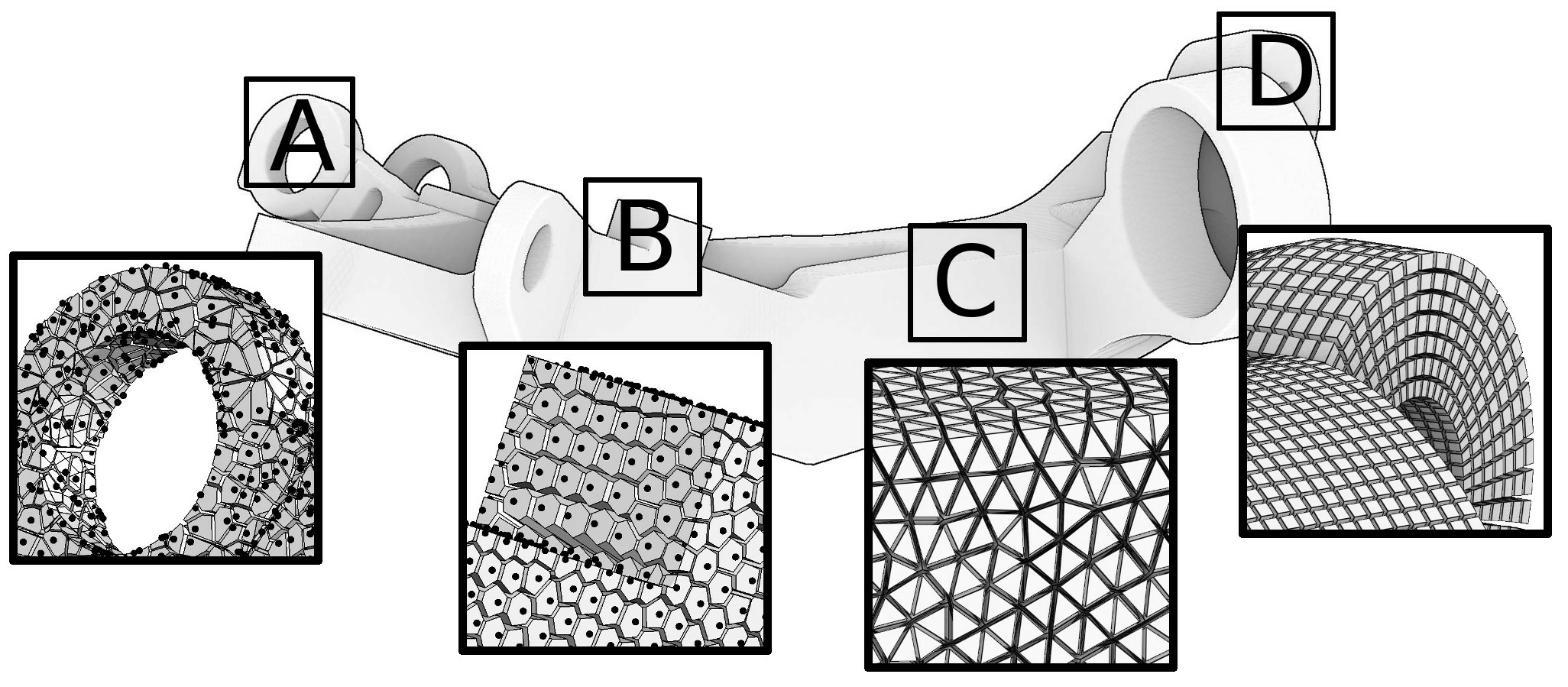
Meshing is central in geometric modeling because it provides a way to represent functions on the objects being studied (texture coordinates, temperature, pressure, speed, etc.). There are numerous ways to represent functions, but if we suppose that the functions are piecewise smooth, the most versatile way is to discretize the domain of interest. Ways to discretize a domain range from point clouds to hexahedral meshes; let us list a few of them sorted by the amount of structure each representation has to offer (refer to Figure 1).
-
At one end of the spectrum there are point clouds: they exhibit no structure at all (white noise point samples) or very little (blue noise point samples). Recent explosive development of acquisition techniques (e.g. scanning or photogrammetry) provides an easy way to build 3D models of real-world objects that range from figurines and cultural heritage objects to geological outcrops and entire city scans. These technologies produce massive, unstructured data (billions of 3D points per scene) that can be directly used for visualization purposes, but this data is not suitable for high-level geometry processing algorithms and numerical simulations that usually expect meshes. Therefore, at the very beginning of the acquisition-modeling-simulation-analysis pipeline, powerful scan-to-mesh algorithms are required.
During the last decade, many solutions have already been proposed 40, 19, 35, 34, 23, but the problem of building a good mesh from scattered 3D points is far from being solved. Beside the fact that the data is unusually large, the existing algorithms are challenged also by the extreme variation of data quality. Raw point clouds have many defects, they are often corrupted with noise, redundant, incomplete (due to occlusions): they all are uncertain.
-
Triangulated surfaces are ubiquitous, they are the most widely used representation for 3D objects. Some applications like 3D printing do not impose heavy requirements on the surface: typically it has to be watertight, but triangles can have an arbitrary shape. Other applications like texturing require very regular meshes, because they suffer from elongated triangles with large angles.
While being a common solution for many problems, triangle mesh generation is still an active topic of research. The diversity of representations (meshes, NURBS, ...) and file formats often results in a “Babel” problem when one has to exchange data. The only common representation is often the mesh used for visualization, that has in most cases many defects, such as overlaps, gaps or skinny triangles. Re-injecting this solution into the modeling-analysis loop is non-trivial, since again this representation is not well adapted to analysis.
-
Tetrahedral meshes are the volumic equivalent of triangle meshes, they are very common in the scientific computing community. Tetrahedral meshing is now a mature technology. It is remarkable that still today all the existing software used in the industry is built on top of a handful of kernels, all written by a small number of individuals 25, 43, 50, 29, 41, 44, 26, 55.
Meshing requires a long-term, focused, dedicated research effort that combines deep theoretical studies with advanced software development. We have the ambition to bring this kind of maturity to a different type of mesh (structured, with hexahedra), which is highly desirable for some simulations, and for which, unlike tetrahedra, no satisfying automatic solution exists. In the light of recent contributions, we believe that the domain is ready to overcome the principal difficulties.
-
Finally, at the most structured end of the spectrum there are hexahedral meshes composed of deformed cubes (hexahedra). They are preferred for certain physics simulations (deformation mechanics, fluid dynamics ...) because they can significantly improve both speed and accuracy. This is because (1) they contain a smaller number of elements (5-6 tetrahedra for a single hexahedron), (2) the associated tri-linear function basis has cubic terms that can better capture higher-order variations, (3) they avoid the locking phenomena encountered with tetrahedra 16, (4) hexahedral meshes exploit inherent tensor product structure and (5) hexahedral meshes are superior in direction dominated physical simulations (boundary layer, shock waves, etc). Being extremely regular, hexahedral meshes are often claimed to be The Holy Grail for many finite element methods 17, outperforming tetrahedral meshes both in terms of computational speed and accuracy.
Despite 30 years of research efforts and important advances, mainly by the Lawrence Livermore National Labs in the U.S. 49, 47, hexahedral meshing still requires considerable manual intervention in most cases (days, weeks and even months for the most complicated domains). Some automatic methods exist 33, 53, that constrain the boundary into a regular grid, but they are not fully satisfactory either, since the grid is not aligned with the boundary. The advancing front method 14 does not have this problem, but generates irregular elements on the medial axis, where the fronts collide. Thus, there is no fully automatic algorithm that results in satisfactory boundary alignment.
3 Research program
3.1 Point clouds
Currently, transforming the raw point cloud into a triangular mesh is a long pipeline involving disparate geometry processing algorithms:
- Point pre-processing: colorization, filtering to remove unwanted background, first noise reduction along acquisition viewpoint;
- Registration: cloud-to-cloud alignment, filtering of remaining noise, registration refinement;
- Mesh generation: triangular mesh from the complete point cloud, re-meshing, smoothing.
The output of this pipeline is a locally-structured model which is used in downstream mesh analysis methods such as feature extraction, segmentation in meaningful parts or building Computer-Aided Design (CAD) models.
It is well known that point cloud data contains measurement errors due to factors related to the external environment and to the measurement system itself 46, 39, 21. These errors propagate through all processing steps: pre-processing, registration and mesh generation. Even worse, the heterogeneous nature of different processing steps makes it extremely difficult to know how these errors propagate through the pipeline. To give an example, for cloud-to-cloud alignment it is necessary to estimate normals. However, the normals are forgotten in the point cloud produced by the registration stage. Later on, when triangulating the cloud, the normals are re-estimated on the modified data, thus introducing uncontrollable errors.
We plan to develop new reconstruction, meshing and re-meshing algorithms, with a specific focus on the accuracy and resistance to all defects present in the input raw data. We think that pervasive treatment of uncertainty is the missing ingredient to achieve this goal. We plan to rethink the pipeline with the position uncertainty maintained during the whole process. Input points can be considered either as error ellipsoids 51 or as probability measures 31. In a nutshell, our idea is to start by computing an error ellipsoid 54, 36 for each point of the raw data, and then to cumulate the errors (approximations) made at each step of the processing pipeline while building the mesh. In this way, the final users will be able to take the knowledge of the uncertainty into account and rely on this confidence measure for further analysis and simulations. Quantifying uncertainties for reconstruction algorithms, and propagating them from input data to high-level geometry processing algorithms has never been considered before, possibly due to the very different methodologies of the approaches involved. At the very beginning we will re-implement the entire pipeline, and then attack the weak links through all three reconstruction stages.
3.2 Parameterizations
One of the favorite tools we use in our team are parameterizations, and we have major contributions to the field: we have solved a fundamental problem formulated more than 60 years ago 1. Parameterizations provide a very powerful way to reveal structures on objects. The most omnipresent application of parameterizations is texture mapping: texture maps provide a way to represent in 2D (on the map) information related to a surface. Once the surface is equipped with a map, we can do much more than a mere coloring of the surface: we can approximate geodesics, edit the mesh directly in 2D or transfer information from one mesh to another.
Parameterizations constitute a family of methods that involve optimizing an objective function, subject to a set of constraints (equality, inequality, being integer, etc.). Computing the exact solution to such problems is beyond any hope, therefore approximations are the only resort. This raises a number of problems, such as the minimization of highly nonlinear functions and the definition of direction fields topology, without forgetting the robustness of the software that puts all this into practice.
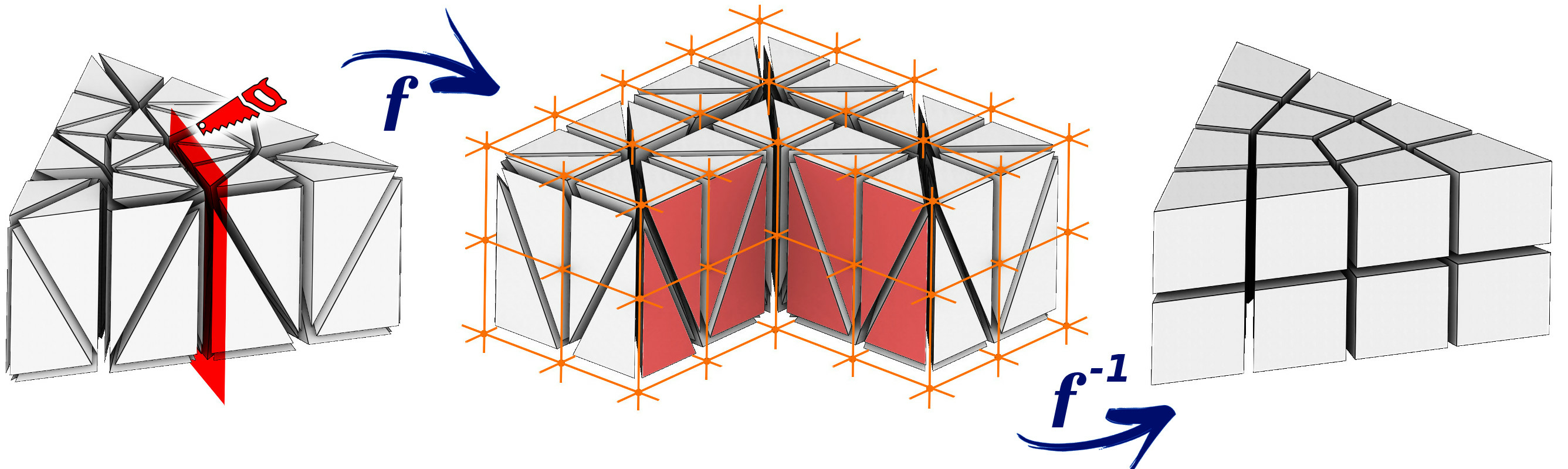
We are particularly interested in a specific instance of parameterization: hexahedral meshing.
The idea 3, 2 is to build a transformation
Current global parameterizations allow grids to be positioned inside geometrically simple objects whose internal structure (the singularity graph) can be relatively basic. We wish to be able to handle more configurations by improving three aspects of current methods:
- Local grid orientation is usually prescribed by minimizing the curvature of a 3D steering field. Unfortunately, this heuristic does not always provide singularity curves that can be integrated by the parameterization. We plan to explore how to embed integrability constraints in the generation of the direction fields. To address the problem, we already identified necessary validity criteria: for example, the permutation of axes along elementary cycles that go around a singularity must preserve one of the axes (the one tangent to the singularity). The first step to enforce this (necessary) condition will be to split the frame field generation into two parts: first we will define a locally stable vector field, followed by the definition of the other two axes by a 2.5D directional field (2D advected by the stable vector field).
- The grid combinatorial information is characterized by a set of integer coefficients whose values are currently determined through numerical optimization of a geometric criterion: the shape of the hexahedra must be as close as possible to the steering direction field. Thus, the number of layers of hexahedra between two surfaces is determined solely by the size of the hexahedra that one wishes to generate. In these settings, degenerate configurations arise easily, and we want to avoid them. In practice, mixed integer solvers often choose to allocate a negative or zero number of layers of hexahedra between two constrained sheets (boundaries of the object, internal constraints or singularities). We will study how to inject strict positivity constraints into these cases, which is a very complex problem because of the subtle interplay between different degrees of freedom of the system. Our first results for quad-meshing of surfaces give promising leads, notably thanks to motorcycle graphs 22, a notion we wish to extend to volumes.
- Optimization for the geometric criterion makes it possible to control the average size of the hexahedra, but it does not ensure the bijectivity (even locally) of the resulting parameterizations. Considering other criteria, as we did in 2D 30, would probably improve the robustness of the process. Our idea is to keep the geometry criterion to find the global topology, but try other criteria to improve the geometry.
3.3 Hexahedral-dominant meshing
All global parameterization approaches are decomposed into three steps: frame field generation, field integration to get a global parameterization, and final mesh extraction. Getting a full hexahedral mesh from a global parameterization means that it has positive Jacobian everywhere except on the frame field singularity graph. To our knowledge, there is no solution to ensure this property, but some efforts are done to limit the proportion of failure cases. An alternative is to produce hexahedral dominant meshes. Our position is in between those two points of view:
- We want to produce full hexahedral meshes;
- We consider as pragmatic to keep hexahedral dominant meshes as a fallback solution.
The global parameterization approach yields impressive results on some geometric objects, which is encouraging, but not yet sufficient for numerical analysis. Note that while we attack the remeshing with our parameterizations toolset, the wish to improve the tool itself (as described above) is orthogonal to the effort we put into making the results usable by the industry. To go further, our idea (as opposed to 37, 24) is that the global parameterization should not handle all the remeshing, but merely act as a guide to fill a large proportion of the domain with a simple structure; it must cooperate with other remeshing bricks, especially if we want to take final application constraints into account.
For each application we will take as an input domains, sets of constraints and, eventually, fields (e.g. the magnetic field in a tokamak). Having established the criteria of mesh quality (per application!) we will incorporate this input into the mesh generation process, and then validate the mesh by a numerical simulation software.
4 Application domains
4.1 Geometric Tools for Simulating Physics with a Computer
Numerical simulation is the main targeted application domain for the geometry processing tools that we develop. Our mesh generation tools will be tested and evaluated within the context of our cooperation with Hutchinson, experts in vibration control, fluid management and sealing system technologies. We think that the hex-dominant meshes that we generate have geometrical properties that make them suitable for some finite element analyses, especially for simulations with large deformations.
We also have a tight collaboration with a geophysical modeling specialists via the RING consortium. In particular, we produce hexahedral-dominant meshes for geomechanical simulations of gas and oil reservoirs. From a scientific point of view, this use case introduces new types of constraints (alignments with faults and horizons), and allows certain types of nonconformities that we did not consider until now.
Our cooperation with RhinoTerrain pursues the same goal: reconstruction of buildings from point cloud scans allows to perform 3D analysis and studies on insolation, floods and wave propagation, wind and noise simulations necessary for urban planification.
5 Highlights of the year
This year we have organised the 64th edition of the CEA–EDF–Inria summer school (refer to §10.1.1 for more details).
6 New software, platforms, open data
6.1 New software
6.1.1 ultimhex
-
Name:
ultimhex
-
Keywords:
3D, Mesh
-
Functional Description:
- import / convert a CAD model to a mesh - some facet painting tools for triangle meshes, enable to choose the facets orientations in the polycube - polycubification algorithm execution - post-processing tools (padding / hex stack layer redefinition)
- URL:
-
Contact:
Benjamin Loillier
7 New results
Participants: Dmitry Sokolov, Nicolas Ray, Étienne Corman, Yoann Coudert–Osmont.
7.1 Lowest distortion mapping
Mapping is one of the longest standing problems in computational mathematics. In many applications, like in navigation, it is much simpler to work in a map than to directly manipulate the object itself. This makes mapping 3D surfaces to 2D space (or solid domains to 3D space) one of the most important problems in geometry processing. Nowadays applied to a broad variety of domains, mapping takes its origins in the geography. We can trace the interest of mathematicians in maps to the earliest of time. Claudius Ptolemy (circa 100–170 AD), in his treatise “Sphœrœ a planetis projectio in planum”, was already working on mathematical tools to represent these surfaces, in this case the Earth, on the plane. It is indeed a challenge to represent faithfully the surface of the Earth, with its curvature, on the flat plane.
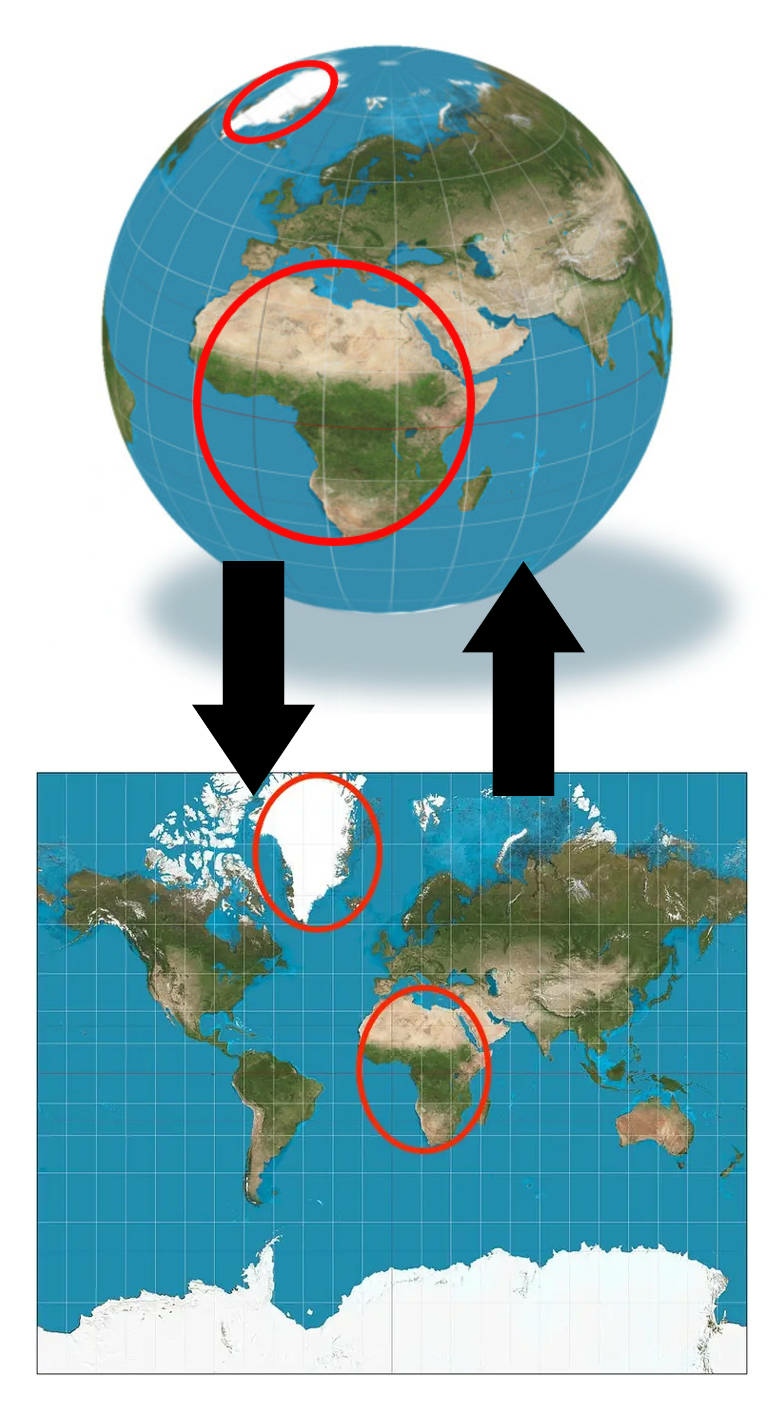
We can distinguish two fundamental properties necessary for a “good” map:
- Invertibility: the very idea of computing a map is to be able to go back and forth between the object itself and its image without ambiguities. If it is the case, we say that the map is invertible.
- Quality: a truly good map must be as little distorted as possible. For example, it is very challenging to measure distances in the Mercator projection of the Earth: in this map Greenland has the size of Africa, while in reality Greenland is 14 times smaller!
Both proprieties have been the subject of extensive research, from Ptolemy in his seminal work “Sphœrœ a planetis projectio in planum” to numerous modern papers. In collaboration with our colleagues from Moscow Institute of Physics and Technology, we set a new bar for mapping algorithms. Few years ago we achieved 1 the biggest leap in guarantees on invertibility since 1963 and now we furthermore extend 5 this leap by providing the best guarantees on the distortion bounds since 1856.
Working directly on distortion of lengths in maps is crazy difficult, and we follow the path set by many others, by solving a proxy problem instead. Imagine that the domain of interest is made of some elastic material, then a deformation with least stored energy must be a good map!
It is a sensible approach, since mathematical elasticity minimizes the deviation from the isometric deformation state on average. So, it is pretty common to minimize
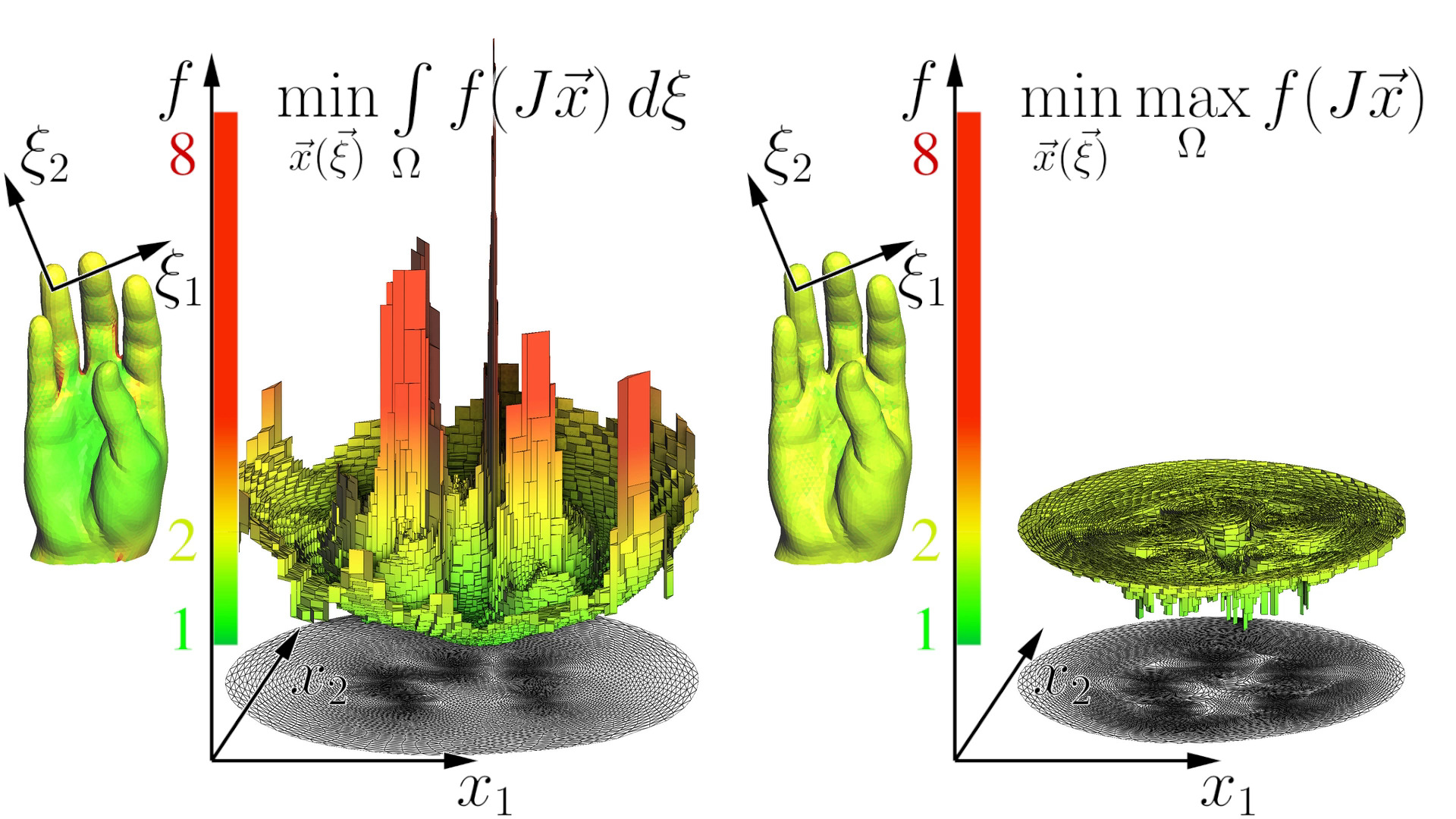
Figure 4 provides the illustration. On the left you can see the map that minimizes the distortion on average, and, thanks to our prior work 1, 9, we can reliably build such maps. In this case most of the cells have little deformation, but several triangles are badly distorted. The problem is that even a single badly distorted element can drastically increase the computational cost when used in a numerical simulation. We can improve the quality of these triangles by sacrificing the quality of some other. In this work we are interested in minimizing the worst distortion, we want to know how to solve the much more difficult problem on the right.
Surprisingly, these two problems are very closely connected, and exposing this connection is an important contribution. We have shown that despite being quite different problems, foldover-free and bounded distortion mapping problems can be solved with very similar approaches. Our very simple approach (150 lines of C++!) allows us to reliably build 2D and 3D mesh deformations with smallest known distortion estimates.
7.2 Curvature-Driven Conformal Deformations


Curvature flows stand as indispensable tools in computer graphics for surface manipulation. They iteratively deform surfaces by minimizing an energy while complying with given constraints, such as area or volume preservation, positional constraints. They essentially define surfaces as the minimizers of specific energies. Computer graphics is usually concerned with two types of curvature-based flows: fairing flows, aimed at surface smoothing, and intrinsic flows, for which computing an embedded representation is often unnecessary.
The first category, fairing flows, progressively molds surfaces to make it as round as possible by minimizing the surface bending. This is quantified by the p-norm of the shape operator, encapsulating the variations in surface normals across all directions. Fairing flows for various p are shown by Figure 5.
The second category: the intrinsic flows, is commonly used in the computer graphics community to “flatten” the surface not visually but from the intrinsic perspective of an “observerliving” on the geometry. In computer graphics, these flows naturally arise when computing texture atlases 42, cone parametrization for quad remeshing 15, or surface approximation using developable patches for manufacturing 52. Here, the focus is on modifying the Gaussian curvature, i.e., the determinant of the shape operator.
These two geometrical flows are of very different nature and were, until now, not treated by the same algorithm.
Furthermore, ensuring a geometric realization of the flow involves formulating these energies in terms of vertex displacement or Jacobian matrices. However, evaluating curvature, a second-order derivative of point positions, on a discrete mesh introduces considerable numerical instability.
In this work 4, we were concerned with unifying the treatment of geometrical flows and improving their numerical instability. To do so, we propose focus on conformal deformation: deformation preserving local angles but allowing large area deformations. This allows us to perform a change of variables to directly operate with scale factors and shape operators. These new variables offer two significant advantages: improving long term stability of the flow and simplifying manipulations of curvature-based energies. Having access to the complete curvature tensor enables us to handle a wide range of energies, including fairing (Figure 5) and “intrinsic" energies (Figure 5). This is made possible by the discovery of a previously unknown necessary and sufficient integrability condition for topological spheres describing when the curvature tensor and the scale factor define a valid conformal deformation.
7.3 Deformation Recovery
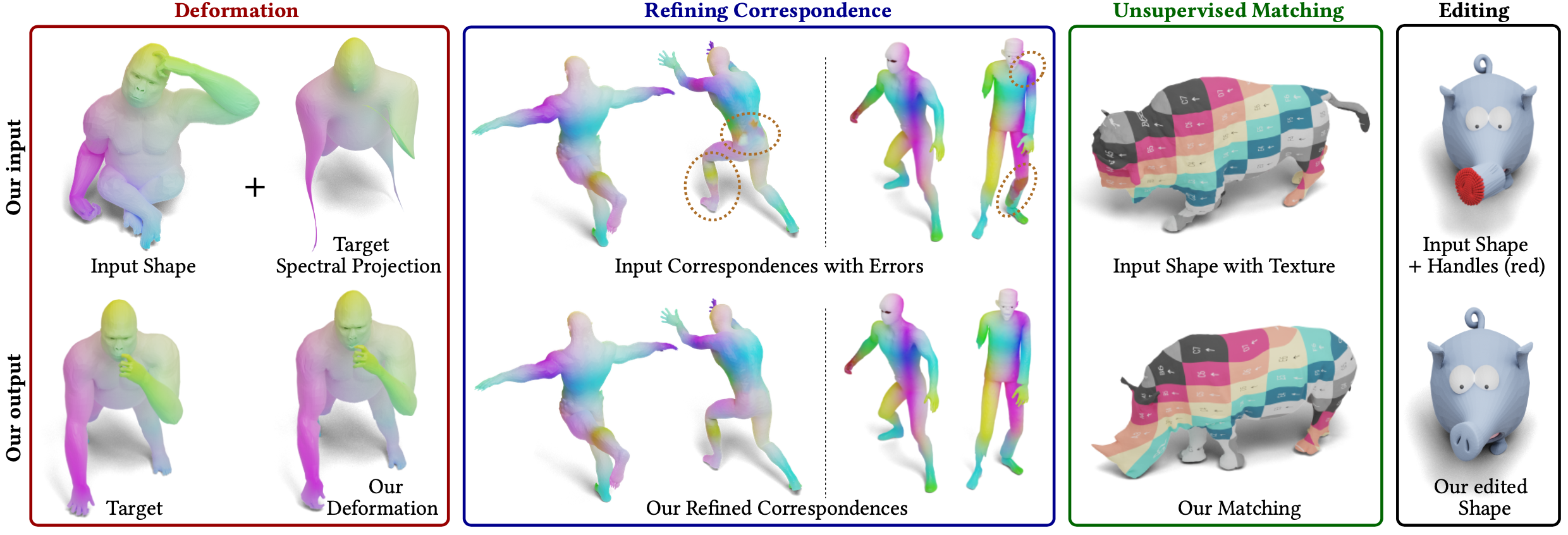
Estimating meaningful deformations of surfaces is a classical problem in computer graphics, with applications in several downstream tasks such as surface mapping and registration, character reposing, and handle-based editing. Due to its broad applicability, numerous techniques have been developed to address this task 18.
While early approaches relied on numerical techniques 18, recent methods, following this trend, leverage structured data-driven priors to estimate plausible deformations 28, 48, 13, 20. Despite significant ongoing efforts, this problem remains challenging. A key difficulty with most existing data-driven methods lies in constructing a feasible latent space 32. This typically requires amassing a collection comprising all plausible deformations 27, 13, thus necessitating a significant amount of training data. Furthermore, even when such data is available, representing shapes using a global encoding typically ties existing approaches to specific shape categories, and thus requires extensive re-training for cross-category generalization.
In this work 7 (also refer to Figure 6), instead of relying on a global shape encoding, we condition our predictions on a coarse, local deformation input signal. This choice is motivated by the observation that, in specific scenarios, constructing an appropriate local input signal is sufficient to learn category-agnostic high-quality deformations. Building on the recent success of Jacobian fields as learnable deformation representation 13, we design a network that predicts Jacobian matrices per triangles. The input to our network is thus a field of Jacobian matrices, averaged to vertices around a one-ring neighborhood, representing a coarse deformation. Our network comprises a series of MLPs coupled with a smoothing operator, which takes coarse Jacobians as input and produces detailed Jacobians. Our network has fully shared weights and is applied independently at each triangle.
Our network prediction is trained by supervising Jacobians corresponding to the detailed mesh, mesh vertex positions, and an integrability loss on Jacobians. Due to the purely local and fully shared nature of our networks, they can be trained using a handful of shapes, as each triangle becomes a training instance.
We consider two general scenarios: shape correspondence and shape editing. For map refinement and shape correspondence, given a fixed source shape and a target shape representing a coarse deformation of the source, we first express the coordinate function of the target shape using the low-frequency eigenfunctions of its Laplace-Beltrami operator to obtain a smooth approximation of its geometry, referred to as the spectrally projected shape. This is a natural representation supported by shape correspondence methods that use the functional map framework 38. We then define the Jacobians from the source shape to the spectrally projected target shape as the coarse deformation signal, which forms the input to our network. For shape editing, we use the rotation matrices at each face, averaged to the incident vertex, as the input signal to produce Jacobians corresponding to a valid shape. The network, training data, and supervision remain consistent across all input signals.
7.4 2.5D Hexahedral meshing for reservoir simulations
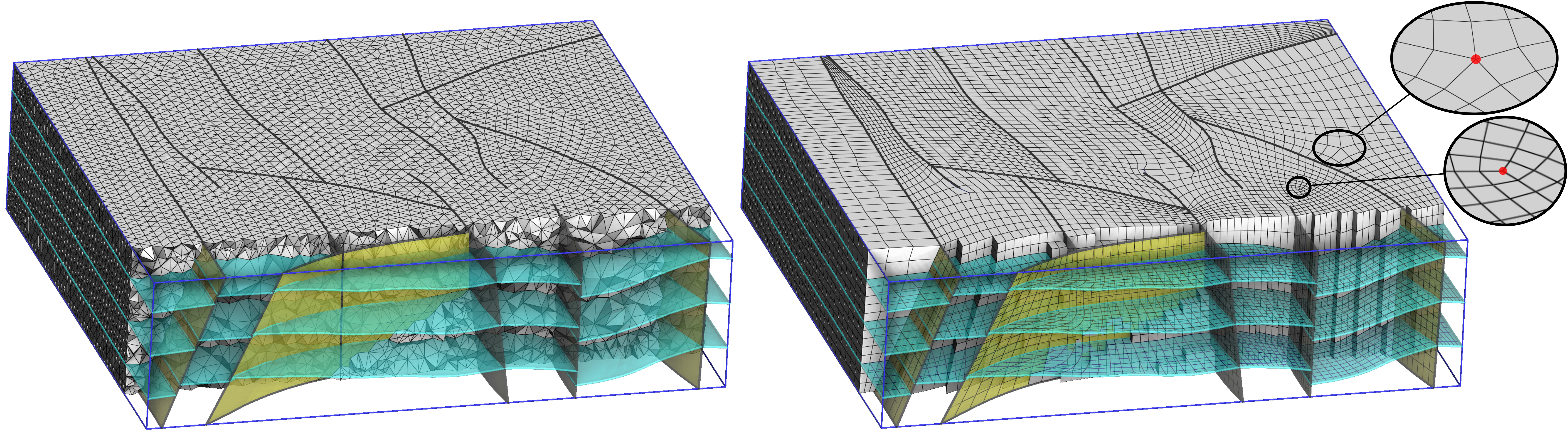
In collaboration with the startup TESSAEL stemmed from the team and TotalEnergies, we presented a new method 6 for generating pure hexahedral meshes for reservoir simulations. The grid is obtained by extruding a quadrangular mesh, using ideas from the latest advances in computational geometry, specifically the generation of semi-structured quadrangular meshes based on global parameterization.
Hexahedral elements are automatically constructed to smoothly honor input features' geometry (domain boundaries, faults, and horizons), thus, making it possible to be used for multiple types of physical simulations on the same mesh.
Main contributions are: the introduction of a new semi-structured hexahedral meshing workflow producing high-quality meshes for a wide range of fault systems, and the study and definition of weak verticality on triangulated surface meshes. This allows us to design better and more robust algorithms during the extrusion phase along non-vertical faults.
We demonstrate 1) the simplicity of using such hexahedral meshes generated using the proposed method for coupled flow-geomechanics simulations with state-of-the-art simulators for reservoir studies, and 2) the possibility of using such semi-structured hexahedral meshes in commercial structured flow simulators, offering an alternative gridding approach to handle a wider family of fault networks without recourse to the stair-step fault approximation.
8 Bilateral contracts and grants with industry
Participants: Dmitry Sokolov, Nicolas Ray.
8.1 Bilateral contracts with industry
Company: TotalEnergies
Duration: 01/10/2020 – 30/03/2024
Participants: Dmitry Sokolov, Nicolas Ray and David Desobry
Abstract: The goal of this project is to improve the accuracy of rubber behavior simulations for certain parts produced by TotalEnergies, notably gaskets. To do this, both parties need to develop meshing methods adapted to the simulation of large deformations in non-linear mechanics. The Pixel team has a strong expertise in hex-dominant meshing, TotalEnergies has a strong background in numerical simulation within an industrial context. This collaborative project aims to take advantage of both expertises.
9 Partnerships and cooperations
9.1 International initiatives
Participants: Étienne Corman.
9.1.1 Visits to international teams
Research stays abroad
Etienne Corman
-
Visited institution:
Carnegie Mellon University
-
Country:
USA
-
Dates:
21/03/24 to 16/05/24
-
Context of the visit:
Pursue collaboration on orthogonal parametrization
-
Mobility program/type of mobility:
research stay
10 Dissemination
Participants: Dobrina Boltcheva, Étienne Corman, Yoann Coudert--Osmont, Nicolas Ray, Dmitry Sokolov.
10.1 Promoting scientific activities
Dmitry Sokolov is an elected member of the executive board of the Association Française d'Informatique Graphique. AFIG is a non-profit scientific association, its aim is to federate and animate the scientific community in fields related to Computer Graphics, to disseminate information and events in the field, and to facilitate networking and interaction between researchers, as well as between industry and research.
10.1.1 Scientific events: organisation
General chair, scientific chair
This year the team has organised the 64th edition of the CEA–EDF–Inria summer school, 43 participants attended to the school (Fig. 8) which took place from June 10 to June 14 at the Centre Inria of the University of Lorraine.
The aim of this summer school was to provide an overview of the automatic and semi-automatic methods currently used to generate hexahedral meshes for academic and industrial purposes. Starting from CAD-like geometric models as input data, recently developed practical and theoretical methods for generating and manipulating hexahedral meshes were presented. In particular, the following points were addressed:
- An overview of existing (semi-)automatic methods for generating hexahedral meshes with associated quality criteria;
- A focus on different representations and methods for generating orientation fields;
- Notions of global parametrizations and their use in meshing;
- Polycube methods;
- Grid intersection methods.
An important part of the course was be devoted to computer-based practical exercises to manipulate these concepts using various software packages, ranging from understanding concepts such as orientation fields to interactive generation of block-structured meshes, via mesh quality assessment.
Reviewer
Members of the team were reviewers for Eurographics, SIGGRAPH, SIGGRAPH Asia, ISVC, Pacific Graphics, and SPM.
10.1.2 Journal
Reviewer - reviewing activities
Members of the team were reviewers for Computer Aided Design (Elsevier), Computer Aided Geometric Design (Elsevier), Transactions on Visualization and Computer Graphics (IEEE), Transactions on Graphics (ACM), Computer Graphics Forum (Wiley), Computational Geometry: Theory and Applications (Elsevier) and Computers & Graphics (Elsevier).
10.1.3 Scientific expertise
Dobrina Boltcheva participated to two Associate Professor hiring committees:
- Université de Lorraine: local member
- Université de Marseilles: exterior member
Dmitry Sokolov participated to one INRIA researcher hiring commitee at the INRIA Saclay Center.
10.1.4 Research administration
Dmitry Sokolov is an elected member of the INRIA evaluation commission which contributes to the evaluation of the activity of the project-teams, to the recruitment and the promotion of the researchers, and to the scientific orientations of the institute.
10.2 Teaching - Supervision - Juries
10.2.1 Teaching
Dobrina Boltcheva is responsible of software engineering study program at IUT Saint-Die and she is also in charge of the local adaptation of the BUT Info program in Saint-Dié.
Dmitry Sokolov is responsible for the 3d year of computer science license at the Université de Lorraine.
Members of the team have teached following courses:
- Master: Étienne Corman, Analysis and Deep Learning on Geometric Data, 12h, M2, École Polytechnique
- Master: Étienne Corman, Geometry processing and geometric deep learning, 12h, M2, Master Mathématiques Vision Apprentissage
- BUT 2 INFO : Dobrina Boltcheva, Algorithmics, 20h, 2A, IUT Saint-Dié-des-Vosges
- BUT 2 INFO : Dobrina Boltcheva, Analyse et concéption UML, 20h, 2A, IUT Saint-Dié-des-Vosges
- BUT 2 INFO : Dobrina Boltcheva, Software engineering, 20h, 2A, IUT Saint-Dié-des-Vosges
- BUT 2 INFO : Dobrina Boltcheva, Computer Vision : Image processing, 20h, 2A, IUT Saint-Dié-des-Vosges
- BUT 3 INFO : Dobrina Boltcheva, Advanced algorithmics, 20h, 3A, IUT Saint-Dié-des-Vosges
- BUT 3 INFO : Dobrina Boltcheva, Graphical Application, 30h, 3A, IUT Saint-Dié-des-Vosges
- BUT 3 INFO : Dobrina Boltcheva, Advanced programming, 30h, 3A, IUT Saint-Dié-des-Vosges
- License : Yoann Coudert–Osmont, Représentation des données visuelles, 6h, M1, Université de Lorraine
- License : Yoann Coudert–Osmont, Système 1, 15h, L2, Université de Lorraine
- License : Yoann Coudert–Osmont, Outils Système, 20h, L2, Université de Lorraine
- License : Yoann Coudert–Osmont, Méthodologie de programmation et de conception avancée, 22h, L1, Université de Lorraine
- License : Yoann Coudert–Osmont, NUMOC, 10h, L1, Université de Lorraine
- Master : Yoann Coudert–Osmont, Programmation compétitive (entraînement au SWERC) , 27h, Mines de Nancy and Télécom Nancy
- License : Dmitry Sokolov, Logic, 30h, 3A, Université de Lorraine
- BUT 3 INFO : Dmitry Sokolov, Logic, 32h, 3A, Université de Lorraine
- License : Dmitry Sokolov, Compilation, 16h, 3A, Université de Lorraine
- Master : Dmitry Sokolov, Numerical modeling, 15h, M2, Université de Lorraine
10.2.2 Supervision
Ongoing PhD
- Tristan Chény, “Anisotropic block-structured mesh generation for extern aerodynamics”, started in October 2024, advisors: Étienne Corman, Franck Ledoux, Dmitry Sokolov
PhD defenses
Yoann Coudert--Osmont defended his PhD 10 “2.5D Frame Fields for Hexahedral Meshing” on December 3, 2024.
10.2.3 Juries
- Dobrina Boltcheva participated in the PhD jury of Alexandre Marin (Université d'Aix-Marseille) as an examiner.
- Étienne Corman participated in the PhD jury of Mattéo Couplet (Université Catholique de Louvain) as a reviewer.
- Dmitry Sokolov participated in the PhD jury of Colin Weill--Duflos (Université Savoie Mont Blanc) as a reviewer.
- Dmitry Sokolov participated in the PhD jury of Pierre Galmiche (Université de Strasbourg) as a reviewer.
- Dmitry Sokolov participated in the PhD jury of Alexandre Marin (Université d'Aix-Marseille) as a reviewer.
- Dmitry Sokolov participated in the PhD jury of Marina Korotina (ITMO University / CentraleSupélec) as an examiner.
- Dmitry Sokolov participated in the PhD jury of Yoann Coudert--Osmont (University of Lorraine) as an examiner.
- Dmitry Sokolov participated in the PhD jury of Grégoire Grzeczkowicz (Gustave Eiffel University) as a reviewer.
11 Scientific production
11.1 Major publications
- 1 articleFoldover-free maps in 50 lines of code.ACM Transactions on GraphicsVolume 40issue 4July 2021, Article No.102, pp 1–16HALDOIback to textback to textback to text
- 2 articlePractical 3D Frame Field Generation.ACM Trans. Graph.356November 2016, 233:1--233:9URL: http://doi.acm.org/10.1145/2980179.2982408DOIback to text
- 3 articleHexahedral-Dominant Meshing.ACM Transactions on Graphics3552016, 1 - 23HALDOIback to text
11.2 Publications of the year
International journals
- 4 articleCurvature-Driven Conformal Deformations.ACM Transactions on Graphics434July 2024, 1-16HALDOIback to text
- 5 articleIn the Quest for Scale-optimal Mappings.ACM Transactions on Graphics431January 2024, 1-16HALDOIback to text
- 6 article2.5D Hexahedral Meshing for Reservoir Simulations.Mathematical GeosciencesApril 2024HALDOIback to text
- 7 articleDeformation Recovery: Localized Learning for Detail-Preserving Deformations.ACM Transactions on Graphics436November 2024, 1-16HALDOIback to text
International peer-reviewed conferences
- 8 inproceedingsValidating Traces of Distributed Programs Against TLA+ Specifications.Software Engineering and Formal Methods15280Software Engineering and Formal Methods, 22nd International ConferenceAveiro, PortugalSpringerNovember 2024, 126-143HAL
- 9 inproceedingsMesh Untangling for Problems with Topological Singularities.Numerical Geometry, Grid Generation and Scientific Computing152Lecture Notes in Computational Science and EngineeringMoscow, RussiaSpringer Nature SwitzerlandDecember 2024, 77-102HALDOIback to text
Doctoral dissertations and habilitation theses
- 10 thesis2.5D Frame Fields for Hexahedral Meshing.Université de LorraineDecember 2024HALback to text
Reports & preprints
Scientific popularization
- 12 inbookSTATE OF THE ART.THINK BEFORE LOADING2024HAL
11.3 Cited publications
- 13 articleNeural Jacobian Fields: Learning Intrinsic Mappings of Arbitrary Meshes.SIGGRAPH2022back to textback to textback to text
- 14 articleA frontal approach to hex-dominant mesh generation.Adv. Model. and Simul. in Eng. Sciences112014, 8:1--8:30URL: https://doi.org/10.1186/2213-7467-1-8DOIback to text
- 15 inproceedingsConformal flattening by curvature prescription and metric scaling.Computer Graphics Forum272Wiley Online Library2008, 449--458back to text
- 16 inproceedingsA Comparison of All-Hexahedral and All-Tetrahedral Finite Element Meshes for Elastic and Elasto-Plastic Analysis.International Meshing Roundtable conf. proc.1995back to text
- 17 inproceedingsMeeting the Challenge for Automated Conformal Hexahedral Meshing.9th International Meshing Roundtable2000, 11--20back to text
- 18 articleOn Linear Variational Surface Deformation Methods.IEEE Transactions on Visualization and Computer Graphics1412008, 213-230DOIback to textback to text
- 19 miscCloud Compare.http://www.danielgm.net/cc/release/back to text
- 20 articleVariational Barycentric Coordinates.ACM Transactions on Graphics426December 2023, 1–16URL: http://dx.doi.org/10.1145/3618403DOIback to text
- 21 articleMeasurement uncertainty on the circular features in coordinate measurement system based on the error ellipse and Monte Carlo methods.Measurement Science and Technology27122016, 125016URL: http://stacks.iop.org/0957-0233/27/i=12/a=125016back to text
- 22 inproceedingsMotorcycle Graphs: Canonical Quad Mesh Partitioning.Proceedings of the Symposium on Geometry ProcessingSGP '08Aire-la-Ville, Switzerland, SwitzerlandCopenhagen, DenmarkEurographics Association2008, 1477--1486URL: http://dl.acm.org/citation.cfm?id=1731309.1731334back to text
- 23 miscGRAPHITE.http://alice.loria.fr/software/graphite/doc/html/back to text
- 24 articleRobust Hex-Dominant Mesh Generation using Field-Guided Polyhedral Agglomeration.ACM Transactions on Graphics (Proceedings of SIGGRAPH)364July 2017DOIback to text
- 25 articleFully Automatic Mesh Generator for 3D Domains of Any Shape.IMPACT Comput. Sci. Eng.23December 1990, 187--218URL: http://dx.doi.org/10.1016/0899-8248(90)90012-YDOIback to text
- 26 articleGmsh: a three-dimensional finite element mesh generator.International Journal for Numerical Methods in Engineering79112009, 1309-1331back to text
- 27 inproceedings3d-coded: 3d correspondences by deep deformation.Proceedings of the European Conference on Computer Vision (ECCV)2018, 230--246back to text
- 28 inproceedingsAtlasNet: A Papier-Mâché Approach to Learning 3D Surface Generation.Proceedings IEEE Conf. on Computer Vision and Pattern Recognition (CVPR)2018back to text
- 29 inproceedingsReliable Isotropic Tetrahedral Mesh Generation Based on an Advancing Front Method.International Meshing Roundtable conf. proc.2004back to text
- 30 inproceedingsLeast squares conformal maps for automatic texture atlas generation.ACM transactions on graphics (TOG)21ACM2002, 362--371back to text
- 31 articleNotions of Optimal Transport theory and how to implement them on a computer.Computer and Graphics2018back to text
- 32 articleExplorable Mesh Deformation Subspaces from Unstructured Generative Models.2023DOIback to text
- 33 inproceedingsA New Approach to Octree-Based Hexahedral Meshing.International Meshing Roundtable conf. proc.2001back to text
- 34 miscMeshMixer.http://www.meshmixer.com/back to text
- 35 miscMeshlab.http://www.meshlab.net/back to text
- 36 inproceedingsUncertainty Propagation for Terrestrial Mobile Laser Scanner.SPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences2016back to text
- 37 articleCubeCover - Parameterization of 3D Volumes.Computer Graphics Forum3052011, 1397-1406URL: https://onlinelibrary.wiley.com/doi/abs/10.1111/j.1467-8659.2011.02014.xDOIback to text
- 38 articleFunctional maps: a flexible representation of maps between shapes.ACM Transactions on Graphics (ToG)3142012, 1--11back to text
- 39 miscSpatial Uncertainty Model for Visual Features Using a Kinect Sensor.2012back to text
- 40 miscPoint Cloud Library.http://www.pointclouds.org/downloads/back to text
- 41 articleNETGEN An advancing front 2D/3D-mesh generator based on abstract rules.Computing and visualization in science111997back to text
- 42 articleMesh parameterization methods and their applications.Foundations and Trends®222007, 105--171back to text
- 43 articleAutomatic three-dimensional mesh generation by the finite octree technique.International Journal for Numerical Methods in Engineering3241991back to text
- 44 articleTetGen, a Delaunay-Based Quality Tetrahedral Mesh Generator.ACM Trans. on Mathematical Software4122015back to text
- 45 techreportCFD Vision 2030 Study: A Path to Revolutionary Computational Aerosciences.NASA/CR-2014-218178, NF1676L-183322014back to text
- 46 articleScanning geometry: Influencing factor on the quality of terrestrial laser scanning points.ISPRS Journal of Photogrammetry and Remote Sensing6642011, 389 - 399URL: http://www.sciencedirect.com/science/article/pii/S0924271611000098DOIback to text
- 47 inproceedingsUnconstrained Paving & Plastering: A New Idea for All Hexahedral Mesh Generation.International Meshing Roundtable conf. proc.2005back to text
- 48 articleReduced Representation of Deformation Fields for Effective Non-rigid Shape Matching.Advances in Neural Information Processing Systems352022back to text
- 49 articleThe whisker weaving algorithm.International Journal of Numerical Methods in Engineering1996back to text
- 50 articleEfficient three-dimensional Delaunay triangulation with automatic point creation and imposed boundary constraints.International Journal for Numerical Methods in Engineering37121994, 2005--2039URL: http://dx.doi.org/10.1002/nme.1620371203DOIback to text
- 51 inproceedingsRobust and Practical Depth Map Fusion for Time-of-Flight Cameras.Image AnalysisChamSpringer International Publishing2017, 122--134back to text
- 52 articleA Survey of Developable Surfaces: From Shape Modeling to Manufacturing.arXiv preprint arXiv:2304.095872023back to text
- 53 inproceedingsAdaptive and Quality Quadrilateral/Hexahedral Meshing from Volumetric Data.International Meshing Roundtable conf. proc.2004back to text
- 54 articlePoint cloud uncertainty analysis for laser radar measurement system based on error ellipsoid model.Optics and Lasers in Engineering792016, 78 - 84URL: http://www.sciencedirect.com/science/article/pii/S0143816615002675DOIback to text
- 55 miscCgal, Computational Geometry Algorithms Library.http://www.cgal.orgback to text