Section: Software
PROTEUS
Participants : Amaury Nègre, Juan Lahera-Perez.
This toolkit offers a automatic mobile robot driver, some sensors drivers (sensors as Sick laser, GPS, motion tracker, mono or stereo camera), and a 3D Simulator.
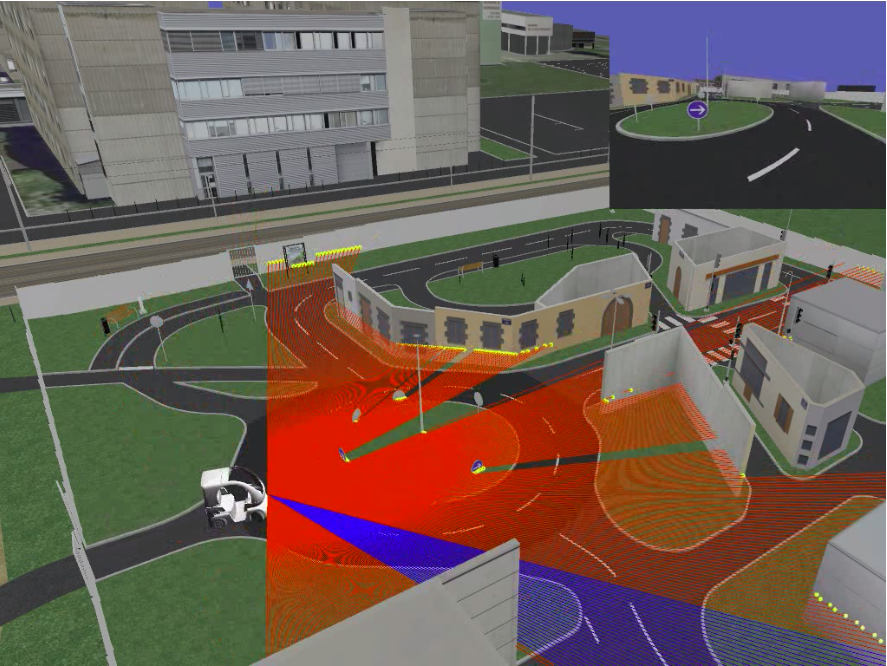
The latest developments have been focuses on the robotics simulator. This simulator is based on the simulation and 3D rendering engine “mgEngine“ (http://mgengine.sourceforge.net/ ) embedded with the physics engine “bullets physics” (http://bulletphysics.org ) for realistic robot dynamic simulation. We also worked on the interface with the robotics middleware “ROS“ (http://www.ros.org ) in order to offer interoperability with many robotics applications. This software is developed in C++ and the simulator operates with the Lua scripting language.
The simulation software is used in the ANR Proteus (http://www.anr-proteus.fr ), as a simulation engine for the PROTEUS Toolkit.