

Section: New Results
High level models for animation
Geometrical methods for skinning character animations
Participants : Marie-Paule Cani, Stefanie Hahmann, Damien Rohmer.
|

Skeletal animation is an efficient and widely used technique in video games or movie industry due to its flexibility and simplicity. Still, the skinning method do not take into account informations about the physical properties of the underlying material. Therefore effects such as muscle bulging or fat tissue compression cannot be modeled without the addition of a teadious manual correction. Within Damien Rohmers PhD [1] , an active geometry framework was proposed in order to enhance geometry information with a priori knowledge about how the unerdlying material can deform. For instance, bending the belly of an animal will be constraint to generate bulges that will preserve locally the volume (see fig. 6 ). The process can be either purely automatically generated, or it can be artistically controled.
Action representation, segmentation and recognition
Participant : Remi Ronfard.
Following Daniel Weinland's PhD thesis, we published a survey of modern methods for representing, segmenting and recognizing full-body actions in video [12] . A taxonomy of methods is elaborated in that paper, where actions can be represented with local, structured or global features both in time and in space. The potential for future work in grammar-based action recognition is emphasized, with possible applications in corpus-based procedural modeling of actions.
Frame-based simulation of deformable solids
Participants : Guillaume Bousquet, Françcois Faure.
We present a new type of deformable model which combines the realism of physically based continuum mechanics models and the usability of frame-based skinning methods [4] . The degrees of freedom are coordinate frames (see Figure 15). In contrast with traditional skinning, frame positions are not scripted but move in reaction to internal body forces. The displacement field is smoothly interpolated using blending techniques such as dual quaternions . The deformation gradient and its derivatives are computed at each sample point of a deformed object and used in the equations of Lagrangian mechanics to achieve physical realism. This allows easy and very intuitive definition of the degrees of freedom of the deformable object. The meshless discretization allows on-the-fly insertion of frames to create local deformations where needed. We formulate the dynamics of these models in detail and describe some pre-computations that can be used for speed. We show that our method is effective for behaviors ranging from simple unimodal deformations to complex realistic deformations comparable with Finite Element simulations.
|
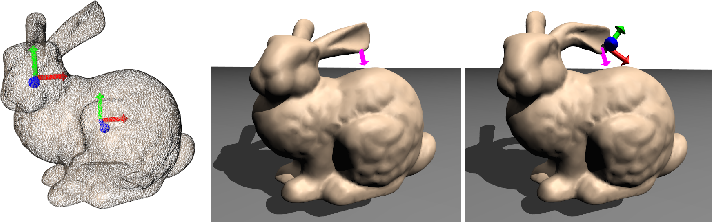
We extend the approach (see fig. 7 ) to the simulation of complex, intricated material distributions using material-aware shape functions [3] . Given a volumetric map of the material properties of an object and a number of control nodes, a distribution of the nodes is computed automatically, as well as the associated shape functions. Reference frames are attached to the nodes, and deformations are applied to the object using lin- ear blend skinning. A continuum mechanics formulation is de- rived from the displacements and the material properties. We in- troduce novel material-aware shape functions in place of the tradi- tional radial basis functions used in meshless frameworks. These allow coarse deformation functions to very ef?ciently resolve non- uniform stiffnesses. Complex models can thus be simulated at high frame rates using a small number of control nodes.
To encourage its use, the software is freely available in the simulation platform SOFA.