Section: New Results
Animation of quadrupeds locomotion
Participant : Lionel Reveret.
Following a study on locomotion of quadrupeds by a team in the National Museum of Natural History (MNHN), a new theory on motion planning has been proposed. This theory, the Antero-Posterior Sequences (APS), allows a characterization of the sequence of foot placement for quadrupeds for all regular gaits with very few parameters, as well as transition between gaits, starting from stop to full gallop. In collaboration with the MNHN and the robotics department of the University of Versailles-Saint Quentin en Yvelines (UVSQ), a rigorous software implementation has been specified and developed. This software allows automatically generating foot planning of quadrupeds locomotion according to a desired speed transition. Co-workers for this project were Ludovic Maes and Anick Abourachid at the MNHN and Vincent Hugel at the UVSQ. A patent has been written and finalized for this project.
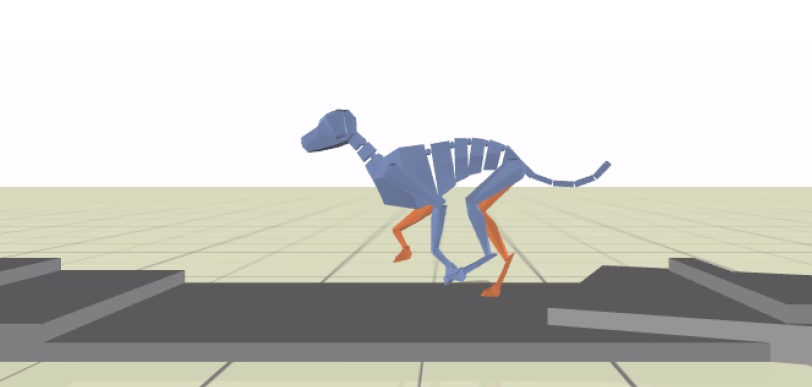
In parallel, collaboration on physical simulation of quadrupeds locomotion has been carried on with Stelian Coros (previously at University of British Columbia (UBC), now at Disney Research) and Michiel van de Panne (UBC). Automatic video analysis of dog walking, trotting and running has been used to optimize parameters of physical controllers. This work has been published at SIGGRAPH 2011 [6] .