

Section: New Results
Object Tracking Using a Particle Filter based on SIFT Features
Participants : Malik Souded, François Brémond.
The approach consists in detecting SIFT points of interest on the objects to track, calculating their SIFT descriptors, tracking these points with a particle filter, and finally achieving tracking process by linking them along the time with links which are weighted by measures on SIFT descriptors and reliability.
The main contributions in this work are on three points.
The first point consists in techniques of detection and selection of SIFT points, allowing a better distribution of points of interest on the target and allowing better management of partial occlusions, and secondly an optimized computing time thanks to the parallelization of these SIFT computation on modern processors (see figure 13 ).

The second point concerns the weighting of the particles during tracking. This is done with a combination of two kinds of information: the similarity measure of the SIFT descriptor and the state of motion of pixels corresponding to the particles. This allows more robust tracking of SIFT points regardless of the quality of the background subtraction providing the detected objects.
The last point concerns the selection of temporal links between tracked objects and detected ones. These links are selected according to their weight. The weight of each link is based on the proportion of common SIFT points to both objects (two successive images) potentially linked, and the reliability of each of these SIFT point. This reliability is calculated for each point by measuring the variation of the SIFT descriptor during the tracking time.
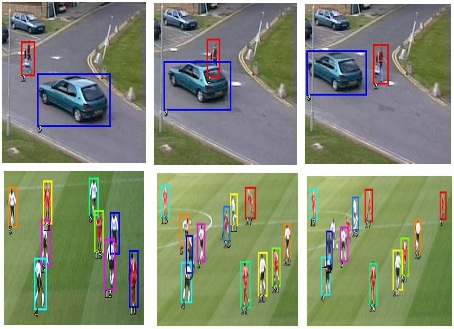
The occlusion management is performed using three types of information: SIFT descriptors used for tracking (matching after reappearance) the dominant colors of the object of interest and finally the width, height, and speed (in real world) of the object, which are learned in Gaussian models during the tracking (tracking being used with video cameras which have been calibrated), see figure 14 .
The approach was tested on 121 sequences of four different datasets: 80 sequences from CAVIAR , 34 sequences from ETISEO, 3 sequences from PETS2001 and 2 sequences from VS_PETS2003. The obtained results are satisfying. The comparison of these results with the state of the art shows improvements for the benchmarking dataset (ETISEO) The following table compares the proposed approach and state of the art results on ETISEO data base:
| Metrics | ETI-VS1-BE-18-C4 | ETI-VS1-BE-16-C4 | ETI-VS1-MO-7-C1 | |
| Proposed tracker | M1 | 0.68 | 0.54 | 0.90 |
| Chau et al. (VISAPP 2011) | M1 | 0.64 | 0.36 | 0.87 |
| Best team in ETISEO Project (2005) | M1 | 0.48 | 0.44 | 0.77 |
This work was published in [49]