Section: New Results
Creating and interacting with virtual prototypes
Space deformations
Participant : Stefanie Hahmann.
Free Form Deformation (FFD) is a well-established technique for deforming arbitrary object shapes in space. Although more recent deformation techniques have been introduced, amongst them skeleton-based deformation and cage based deformation, the simple and versatile nature of FFD is a strong advantage, and justifies its presence in nowadays leading commercial geometric modeling and animation software systems. Several authors have addressed the problem of volume preserving FFD. These previous approaches however make either use of expensive non-linear optimization techniques, or resort to first order approximation suitable only for small-scale deformations. Our approach was to take advantage from the multi-linear nature of the volume constraint in order to derive a simple, exact and explicit solution to the problem of volume preserving FFD. Two variants of the algorithm have been developed, without and with direct shape manipulation. Moreover, we showed that the linearity of our solution enables to implement it efficiently on GPU. This work has been done in collaboration with Gershon Elber from TECHNION, Hans Hagen from TU Kaiserslautern, Georges-Pierre Bonneau and Sébastien Barbier from Maverick Inria. It has been published in the journal The Visual Computer [5] .
|

Within Lucian Stanculescu PhD, we developped a mesh structure that dynamically adapts to the deformation defined by the user. Thanks to the quasi-uniform property of the mesh, it can be locally extended by any arbitrary deformation, and the mesh can also hanlde changes of topologies to be used as a virtual sculpting tool. This year we extend this work to handle local features such as sharp edges. In defining features (points or curves) over the surface we can interactively define meaningfull regions limiting the influence of the deformation tools, or to ease artistic decorration mapping such as textures or extra geometric layers. We aim to generate a new tool enabling to sculpt objects which blend between organic to CAD-style appearance.
Procedural modeling of terrains and cities
Participants : Adrien Bernhard, Marie-Paule Cani, Arnaud Emilien.
Within the PhD of Adrien Bernhard we introduced a real-time terrain modeling tool using a fast GPU-based terrain solver with a lightweight CPU-based data structure.
We then work on adding roads and settlements on this terrain within the PhD of Arnaud Emilien. We focused on the modeling of small, European villages that took benefit of terrain features to settle in safe, sunny or simply convenient places. We introduced a three step procedural method [3] for generating scattered settlements on arbitrary terrains, enabling villages and hamlets, with the associated roads, forests and fields to be built on arbitrary landscapes.
|

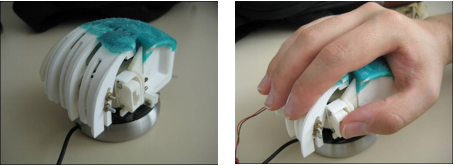
Hand Navigator
Participant : Jean-Claude Léon.
The different deformation models we developed in the past few years open the problem of providing intuitive interaction tools for specifying the desired deformations in real-time. Therefore, work has focused on developing new devices to investigate interactions incorporating a rather large number of parameters. For the past three years, we focused on developing a peripheral device similar to a mouse, called the HandNavigator, enabling to control simultaneously ten or more degrees of freedom of a virtual hand. This device developed in collaboration with Jean-Rémy Chardonnet (Inst. Image, Arts et Métiers ParisTech) consists in a 3D mouse for the position and orientation of the hand in 3D space, enhanced with many sensors for moving and monitoring the virtual fingers. Thanks to a pre-industrialization project funded by the incubator GRAVIT, the first prototype, patented by Inria, has been extended with the incorporation of new sensors and new shapes to improve the device efficiency and evolve toward a passive haptic device (see Figure 17 ). An extension of the patent and a partnership with HAPTION company are new steps toward the industrialization of this device. The partnership with HAPTION focuses on grasping actions to use the Hand Navigator as a complement to their haptic feedback device. Publications took place after setting up the patent extension [12] , [13] . The ongoing BQR INTUACTIVE funded by Grenoble-INP will lead to further scientific topics regarding interactions during grasping as well as with deformable bodies and a partnership is ongoing with GIPSA-Lab to study the muscular activity during interactions. A specific experiment has been set up to study the user's muscles activity.