Section: New Results
Rendering, inpainting and super-resolution
image-based rendering, inpainting, view synthesis, super-resolution
Image and video inpainting
Participants : Mounira Ebdelli, Christine Guillemot, Olivier Le Meur.
Image (and video) inpainting refers to the process of restoring missing or damaged areas in an image (or a video). This field of research has been very active over the past years, boosted by numerous applications: restoring images from scratches or text overlays, loss concealment in a context of impaired image transmission, object removal in a context of editing, disocclusion in image-based rendering of viewpoints different from those captured by the cameras. Inpainting is an ill-posed inverse problem: given observations, or known samples in a spatial (or spatio-tempoal) neighborhood, the goal is to estimate unknown samples of the region to be filled in. Many methods already exist for image inpainting, either based on PDE (Partial Derivative Equation)-based diffusion schemes, either using sparse or low rank priors or following texture synthesis principles exploiting statistical or self-similarity priors.
Novel methods have been developed investigating two complementary directions first for image inpainting. The first direction which has been explored is the estimation of the unknown pixel with different neighbor embedding methods, i.e. Locally Linear embedding (LLE), LLE with a low-dimensional neigborhood representation (LLE-LDNR), Non-Negative Matrix Factorization (NMF) with various solvers [16] . The second method developed uses a two-steps hierarchical (or coarse to fine) approach to reduce the execution time [17] . In this hierarchical approach, a low resolution version of the input image is first inpainted, this first step being followed by a second one which recovers the high frequency details of the inpainted regions, using a single-image super-resolution method. To be less sensitive to the parameters setting of the inpainting, the low-resolution input picture is inpainted several times with different settings. Results are then efficiently combined with a loopy belief propagation. Experimental results in a context of image editing, texture synthesis and 3D view synthesis demonstrate the effectiveness of the proposed method.
The problem of video inpainting has also been considered. A first video inpainting algorithm has been developed in 2012, using a spatio-temporal examplar-based method. The algorithm proceeds in three steps. The first one inpaints missing pixels in moving objects using motion information. Then the static background is inpainted exploiting similarity between neighboring frames. The last step fills in the remaining holes in the current frame using spatial inpainting. This approach works well with static cameras but not so well when the video has been captured by free-moving cameras.
In 2013, we have therefore addressed the problem of video inpainting with free-moving cameras. The algorithm developed first compensates the camera motion between the current frame and its neighboring frames in a sliding window, using a new region-based homography computation which better respects the geometry of the scene compared to state-of-the-art methods. The source frame is first segmented into regions in order to find homogeneous regions. Then, the homography for mapping each region into the target frame is estimated. The overlapping of all aligned regions forms the registration of the source frame into the target one. Once the neighboring frames have been aligned, they form a stack of images from which the best candidate pixels are searched in order to replace the missing ones. The best candidate pixel is found by minimizing a cost function which combines two energy terms. One energy term, called the data term, captures how stationary is the background information after registration, hence enforcing temporal coherency. The second term aims at favoring spatial consistency and preventing incoherent seams, by computing the energy of the difference between each candidate pixel and its 4-neighboring pixels in the missing region. The minimization of the energy term is performed globally using Markov Random Fields and graph cuts. The proposed approach, although less complex than state-of-the-art methods, provides more natural results (see Fig.3 ).

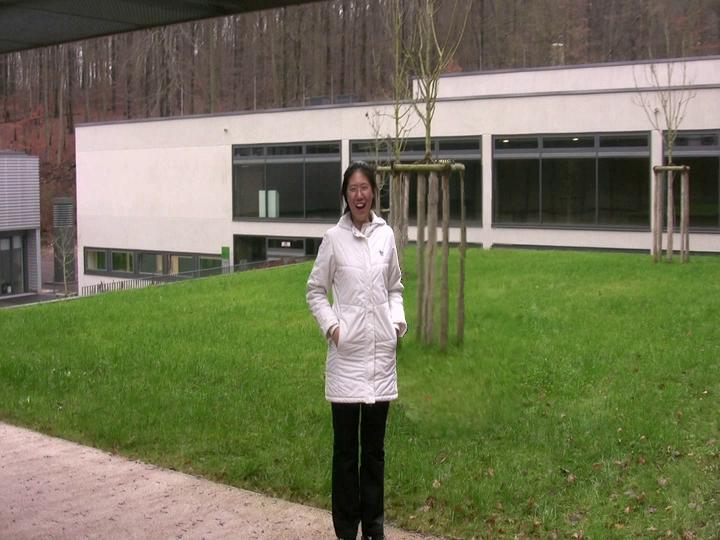
Image priors for inpainting
Participants : Raul Martinez Noriega, Aline Roumy.
Image inpainting is an ill-posed inverse problem which has no well-defined unique solution. To make this problem more "well-defined" it is necessay to introduce image priors. We consider here the problem of extracting such priors to help restoring the connection of long edges across the missing region. The prior is defined as a binary image that contains the locations of salient edge points located at the boundary of the missing region as well as the linear edges that join these points across the missing region. A method has been developed to extract such priors. It first detect edges which are then successively pruned in order to keep only informative edges, i.e., which have coherent gradients and are either part of a salient structure, or at the border between two different textures. Edges which are quasi-perpendicular to the boundary of the missing region are finally retained. Directions of the retained edges are computed and pairs of edges with similar directions are then connected with straight lines. These lines are used to segment the image into different regions and to define the processing order of the patches to be inpainted. Only patches from the known part and belonging to the same region as the input patch are used. This avoids bringing details of one texture into another one, as well as the unconnected edge problem [35] .
Image and video super-resolution
Participants : Marco Bevilacqua, Christine Guillemot, Aline Roumy.
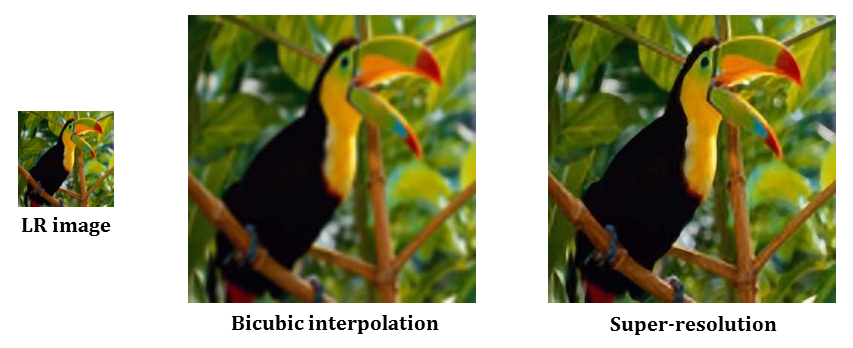
Super-resolution (SR) refers to the problem of creating a high-resolution (HR) image, given one or multiple low-resolution (LR) images as input. The SR process aims at adding to the LR input(s) new plausible high-frequency details, to a greater extent than traditional interpolation methods (see, for example, Fig. 4 for a comparison between bicubic interpolation and SR). We mostly focused on the single-image problem, where only a single LR image is available.
We have adopted the example-based framework, where the relation between the LR and HR image spaces is modeled with the help of pairs of small “examples’’, i.e. texture patches. Each example pair consists of a LR patch and its HR version that also includes high-frequency details; the pairs of patches form a dictionary of patches. For each patch of the LR input image, one or several similar patches are found in the dictionary, by performing a nearest neighbor search. The corresponding HR patches in the dictionary are then combined to form a HR output patch; and finally all the reconstructed HR patches are re-assembled to build the super-resolved image.
In this procedure, one important aspect is how the dictionary of patches is built. At this regard, two choices are possible: an external dictionary, formed by sampling HR and LR patches from external training images; and an internal dictionary, where the LR/HR patch correspondences are learnt by putting in relation directly the input image and scaled versions of it. The advantage of having an external dictionary is that it is built in advance: this leads to a reduction of the computational time, whereas in the internal case the dictionary is generated online at each run of the algorithm. However, external dictionaries have a considerable drawback: they are fixed and so non-adapted to the input image. To be able to satisfactorily process any input image, we need then to include in the dictionary a large variety of patch correspondences, leading to a high computational time.
To overcome this problem, in [23] we proposed a novel method to build a compact external dictionary. The method consists in first jointly clustering LR and HR patches. The aim of this procedure, which we called JKC (Jointly K-means Clustering), is to prune the dictionary of the “bad’’ pairs of patches, i.e. those ones for which the cluster assignments of the related LR and HR patches do not correspond. Once the dictionary is clustered, it is summarized, by sampling some prototype patches, and applying on them simple geometrical transformations, in order to enrich the dictionary. The so constructed compact dictionary is shown to give equivalent or even better performance than the initial large dictionary with any input image.
The dictionary construction method described in [23] has been used as a basis for designing a full single-image SR algorithm. The new algorithm, presented in [25] , follows the traditional scheme of example-based SR with an external dictionary, where a new way to generate the training patches is introduced. Given a HR training image , the corresponding LR image is generated; but instead of directly sampling patches from and , as usually done, the training images are further processed. An enhanced interpolation of , using an iterated back projection, is used as a source of LR patches, and a high-frequency residual image, given by the difference between and the interpolated LR image, is used for extracting HR patches. The JKC procedure is then applied to get the final compact dictionary. A special example-based SR algorithm has been designed, where the final HR output patches are constructed by combining selected HR residual patches from the dictionary with nonnegative weights. In the context of this study, we have also introduced a novel non-negative dictionary learning method [24] . The proposed method consists of two steps which are alternatively iterated: a sparse coding and a dictionary update stage. As for the dictionary update, an original method has been proposed, which we called K-WEB, as it involves the computation of k WEighted Barycenters.
Besides SR for still images, a preliminary work on video sequences has been also conducted [26] . In particular, we have considered the case of a LR video sequence with periodic high-resolution (HR) key frames. Given this scenario, a specific SR procedure has been designed to upscale each intermediate frame, by using the internal dictionary constructed from the two neighbor key frames.