

Section: New Results
Visual recognition in images
Multi-fold MIL Training for Weakly Supervised Object Localization
Participants : Ramazan Cinbis, Cordelia Schmid, Jakob Verbeek.
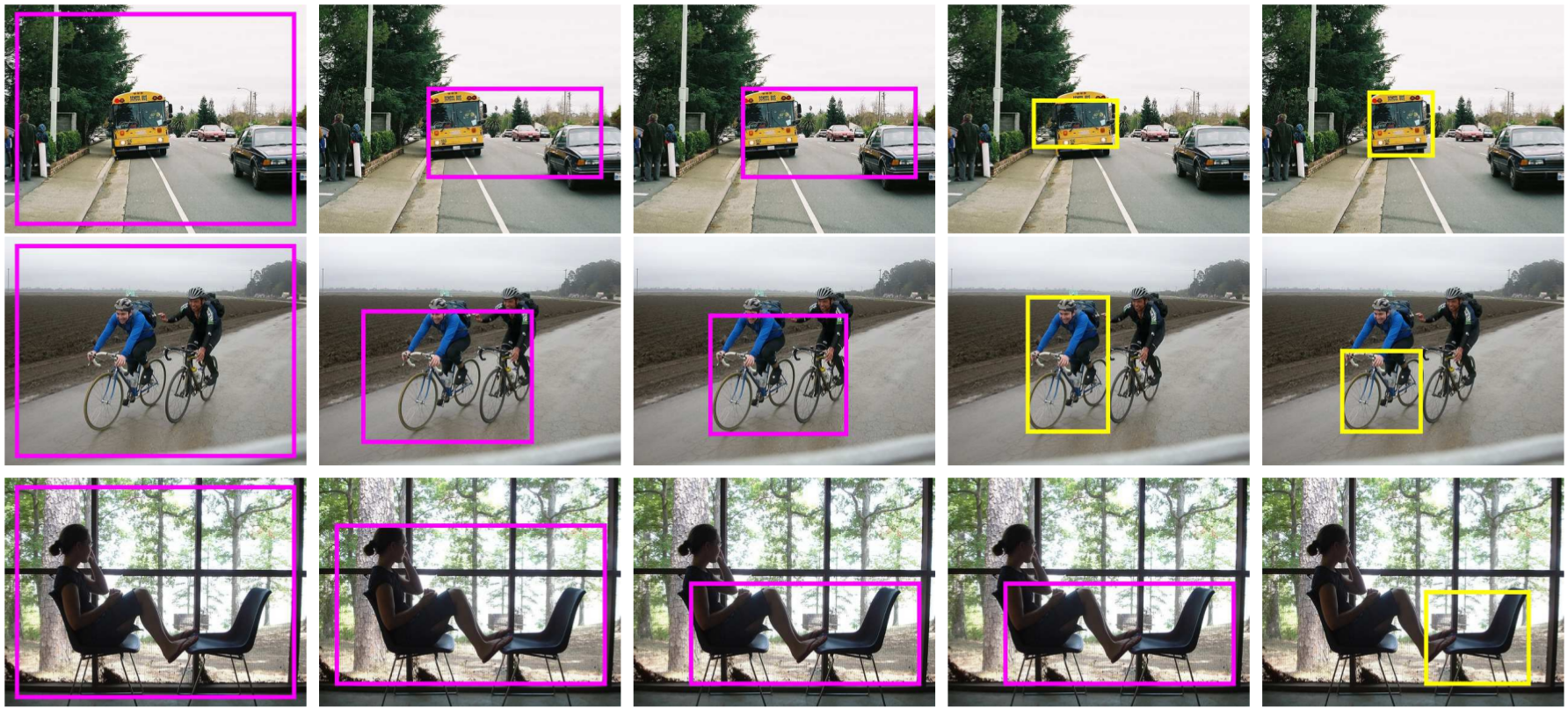
Object category localization is a challenging problem in computer vision. Standard supervised training requires bounding box annotations of object instances. This time-consuming annotation process is sidestepped in weakly supervised learning. In this case, the supervised information is restricted to binary labels that indicate the absence/presence of object instances in the image, without their locations. In [13] , we follow a multiple-instance learning approach that iteratively trains the detector and infers the object locations in the positive training images. Our main contribution is a multi-fold multiple instance learning procedure, which prevents training from prematurely locking onto erroneous object locations. This procedure is particularly important when high-dimensional representations, such as the Fisher vectors, are used. We present a detailed experimental evaluation using the PASCAL VOC 2007 and 2010 datasets. Compared to state-of-the-art weakly supervised detectors, our approach better localizes objects in the training images, which translates into improved detection performance. Figure 1 illustrates the iterative object localization process on several example images.
A journal paper is currently in preparation in which extends [13] by adding experiments with CNN features, and a refinement procedure for the object location inference. These additions improve over related work that has appeared since the publication of the original paper.
|
Transformation Pursuit for Image Classification
Participants : Mattis Paulin, Jerome Revaud, Zaid Harchaoui, Florent Perronnin [XRCE] , Cordelia Schmid.
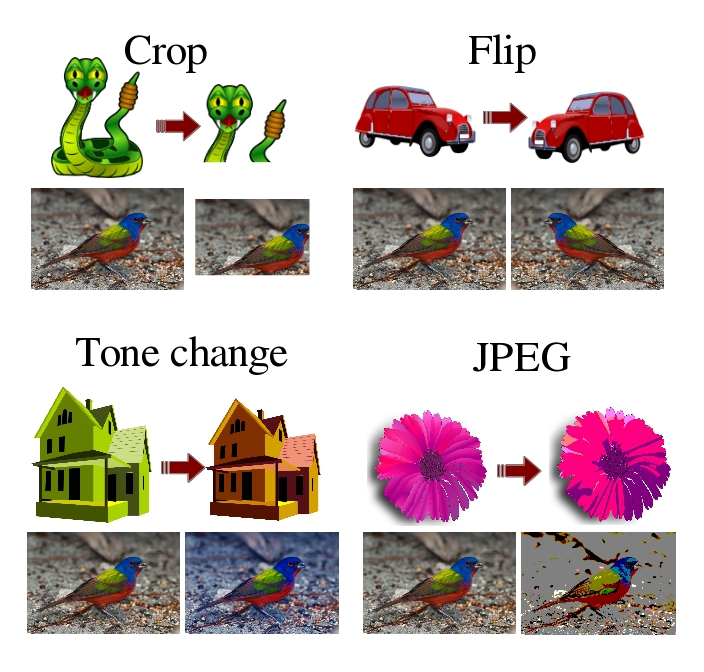
In this work [19] , [23] , we use data augmentation (see Fig 2 for examples) to improve image classification performances in a large-scale context. A simple approach to learning invariances in image classification consists in augmenting the training set with transformed versions of the original images. However, given a large set of possible transformations, selecting a compact subset is challenging. Indeed, all transformations are not equally informative and adding uninformative transformations increases training time with no gain in accuracy. We propose a principled algorithm – Image Transformation Pursuit (ITP) – for the automatic selection of a compact set of transformations. ITP works in a greedy fashion, by selecting at each iteration the one that yields the highest accuracy gain. ITP also allows to efficiently explore complex transformations, that combine basic transformations. We report results on two public benchmarks: the CUB dataset of bird images and the ImageNet 2010 challenge. Using Fisher Vector representations, we achieve an improvement from 28.2% to 45.2% in top-1 accuracy on CUB, and an improvement from 70.1% to 74.9% in top-5 accuracy on ImageNet. We also show significant improvements for deep convnet features: from 47.3% to 55.4% on CUB and from 77.9% to 81.4% on ImageNet.
Convolutional Kernel Networks
Participants : Julien Mairal, Piotr Koniusz, Zaid Harchaoui, Cordelia Schmid.
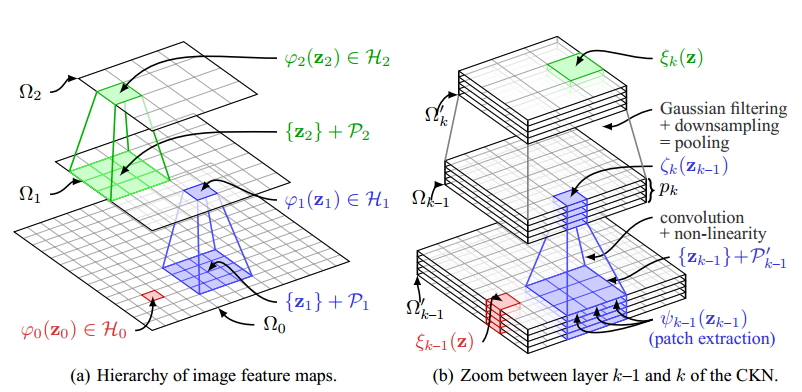
An important goal in visual recognition is to devise image representations that are invariant to particular transformations. In this paper [16] we address this goal with a new type of convolutional neural network (CNN) whose invariance is encoded by a reproducing kernel. Unlike traditional approaches where neural networks are learned either to represent data or for solving a classification task, our network learns to approximate the kernel feature map on training data. Such an approach enjoys several benefits over classical ones. First, by teaching CNNs to be invariant, we obtain simple network architectures that achieve a similar accuracy to more complex ones, while being easy to train and robust to overfitting. Second, we bridge a gap between the neural network literature and kernels, which are natural tools to model invariance. We evaluate our methodology on visual recognition tasks where CNNs have proven to perform well, e.g., digit recognition with the MNIST dataset, and the more challenging CIFAR-10 and STL-10 datasets, where our accuracy is competitive with the state of the art. Figure 3 illustrates the architecture of our network.
|
Scene Text Recognition and Retrieval for Large Lexicons
Participants : Udit Roy [IIIT Hyderabad, India] , Anand Mishra [IIIT Hyderabad, India] , Karteek Alahari, C. v. Jawahar [IIIT Hyderabad, India] .
In [21] , we propose a framework for recognition and retrieval tasks in the context of scene text images. In contrast to many of the recent works, we focus on the case where an image-specific list of words, known as the small lexicon setting, is unavailable. We present a conditional random field model defined on potential character locations and the interactions between them. Observing that the interaction potentials computed in the large lexicon setting are less effective than in the case of a small lexicon, we propose an iterative method, which alternates between finding the most likely solution and refining the interaction potentials. We evaluate our method on public datasets and show that it improves over baseline and state-of-the-art approaches. For example, we obtain nearly 15 improvement in recognition accuracy and precision for our retrieval task over baseline methods on the IIIT-5K word dataset, with a large lexicon containing 0.5 million words.
On Learning to Localize Objects with Minimal Supervision
Participants : Hyun On Song [UC Berkeley] , Ross Girschick [UC Berkeley] , Stefanie Jegelka [UC Berkeley] , Julien Mairal, Zaid Harchaoui, Trevor Darrell [UC Berkeley] .
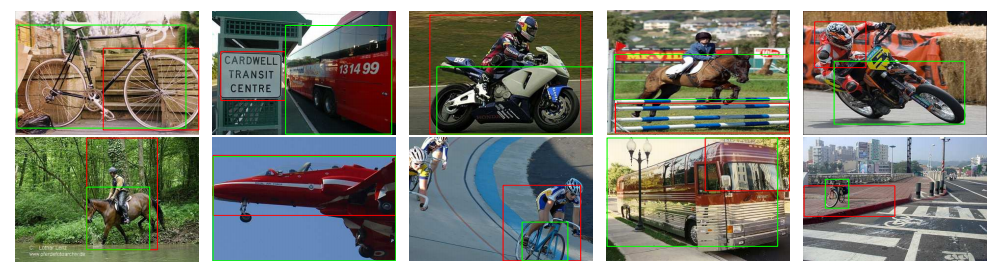
Learning to localize objects with minimal supervision is an important problem in computer vision, since large fully annotated datasets are extremely costly to obtain. In this paper [22] , we propose a new method that achieves this goal with only image-level labels of whether the objects are present or not. Our approach combines a discriminative submodular cover problem for automatically discovering a set of positive object windows with a smoothed latent SVM formulation. The latter allows us to leverage efficient quasiNewton optimization techniques. Experimental results are presented in Figure 4 .
|
Good Practice in Large-Scale Learning for Image Classification
Participants : Zeynep Akata, Florent Perronnin [XRCE] , Zaid Harchaoui, Cordelia Schmid.
In this paper [3] , we benchmark several SVM objective functions for large-scale image classification. We consider one-vs-rest, multi-class, ranking, and weighted approximate ranking SVMs. A comparison of online and batch methods for optimizing the objectives shows that online methods perform as well as batch methods in terms of classification accuracy, but with a significant gain in training speed. Using stochastic gradient descent, we can scale the training to millions of images and thousands of classes. Our experimental evaluation shows that ranking-based algorithms do not outperform the one-vs-rest strategy when a large number of training examples are used. Furthermore, the gap in accuracy between the different algorithms shrinks as the dimension of the features increases. We also show that learning through cross-validation the optimal rebalancing of positive and negative examples can result in a significant improvement for the one-vs-rest strategy. Finally, early stopping can be used as an effective regularization strategy when training with online algorithms. Following these “good practices”, we were able to improve the state-of-the-art on a large subset of 10K classes and 9M images of ImageNet from Top-1 accuracy to .