

Section: New Results
A serial Architecture for a collaborative robot
The haptic magnifier consists in using a serial architecture, where a motor is inserted between a tool and a user's hand (figure 4 ). By this way, the tool's speed can be changed relatively to user's speed , by controlling motor's speed. The haptic rendering of a load can then be changed, and fine details can be more easily detected.
|
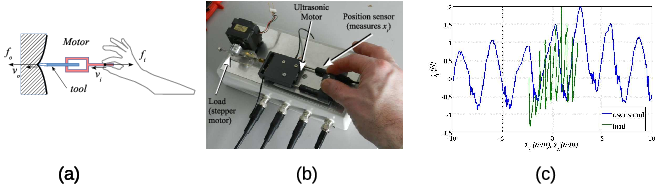
The haptic magnifier is built up with an ultrasonic motor, whose characteristic is low speed - high torque. So the tool and the end-effector can be directly connected to the motor, leading to a lightweight architecture. The user's study presented in [21] have shown that the precision in using the tool could be improved during a freehand manipulation.