Section:
New Results
Non-Rigid Registration meets Surface Reconstruction
Non rigid registration is an important task in computer vision with many applications in shape and motion modeling. A fundamental step of the registration is the data association between the source and the target sets. Such association proves difficult in practice, due to the discrete nature of the information and its corruption by various types of noise, e.g. outliers and missing data. In this work we investigate the benefit of the implicit representations for the non-rigid registration of 3D point clouds. First, the target points are described with small quadratic patches that are blended through partition of unity weighting. Then, the discrete association between the source and the target can be replaced by a continuous distance field induced by the interface. By combining this distance field with a proper deformation term, the registration energy can be expressed in a linear least square form that is easy and fast to solve. This significantly eases the registration by avoiding direct association between points. Moreover, a hierarchical approach can be easily implemented by employing coarse-to-fine representations. Experimental results were conducted with point clouds from multi-view data sets. The qualitative and quantitative comparisons show the outperformance and robustness of our framework. This work was presented at 3DV'14[7] .
Figure
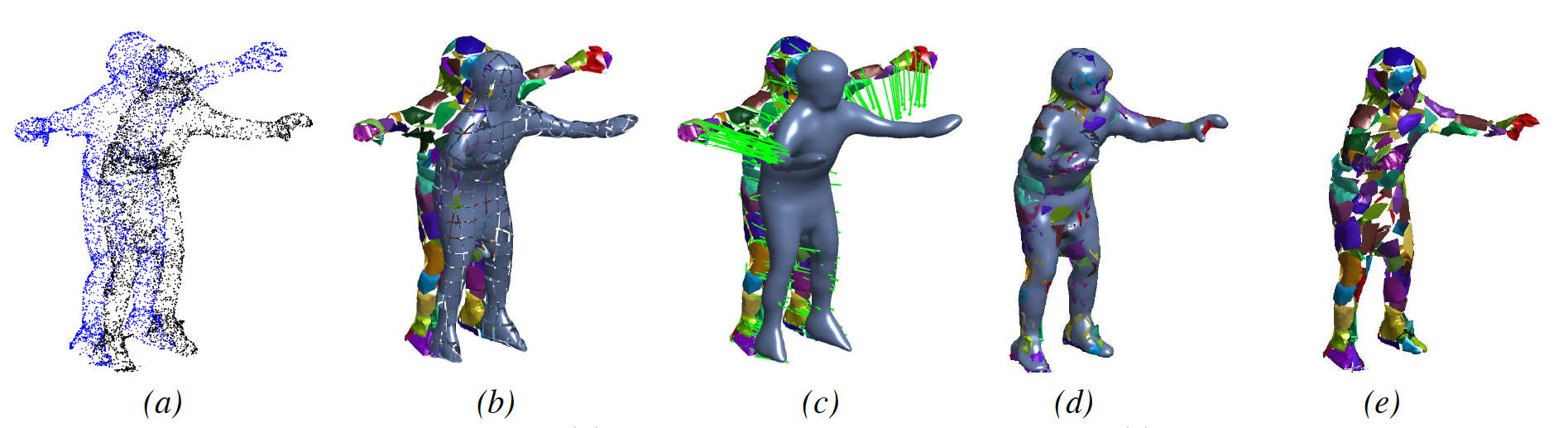
8. Using implicit interface for registration: (a) initial pose of the source and target sets; (b) source patches and the local quadrics
representing the target; (c) the implicit interface induces a gradient field; (d) deformed source patches fitting the interface; a coarse-to-fine
interface has been used in (c) − (d); (e) the final deformation of the template [7] .
|
|