Section: New Results
Analysis and modeling for compact representation and navigation
3D modelling, multi-view plus depth videos, Layered depth images (LDI), 2D and 3D meshes, epitomes, image-based rendering, inpainting, view synthesis
Salient object detection
Participants : Olivier Le Meur, Zhi Liu.
Salient object detection consists in extracting in an automatic manner the most interesting object in an image or video sequence. From an input image, an object, with well-defined boundaries, is detected based on its saliency. This subject knows an renewed interest these last years. A number of datasets serving as ground truth has been released and can be used to benchmark methods.
In 2013, we proposed a new method for detecting salient objects in still color images. In 2014, this method has been extended to video sequences [21] . Based on the superpixel representation of video frames, motion histograms and color histograms are computed at local and global levels. From these histograms, a superpixel-level temporal saliency measure as well as a spatial saliency measure are obtained. Finally, a pixel-level saliency derivation method is proposed to generate pixel-level temporal saliency map and spatial saliency map. An adaptive fusion method allows to integrate them into an unique spatiotemporal saliency map. Experimental results on two public datasets demonstrate that the proposed model outperforms state-of-the-art spatiotemporal saliency model in terms of both saliency detection and human fixation prediction.
Saliency aggregation
Participants : Olivier Le Meur, Zhi Liu.
In this study [32] , we investigate whether the aggregation of saliency maps allows to outperform the best saliency models. Today there exist a number of saliency models for predicting the most visually salient locations within a scene. Although all existing models follow the same objective, they provide results which could be, to some extent, different. The discrepancies are related to the quality of the prediction but also to the saliency map representation. Indeed some models output very focused saliency maps whereas the distribution of saliency values is much more uniform in other models. Others tend to emphasize more on the image edges, the color or luminance contrast. This saliency map manifold contains a rich resource that should be used and from which new saliency maps could be inferred. Combining saliency maps generated using different models might enhance the prediction quality and the robustness of the prediction. Our goal is then to take saliency maps from this manifold and to produce the final saliency map.
This study discussed various aggregation methods; six unsupervised and four supervised learning methods are tested on two existing eye fixation datasets. Results show that a simple average of the TOP 2 saliency maps significantly outperforms the best saliency models. Considering more saliency models tends to decrease the performance, even when robust aggregation methods are used. Concerning the supervised learning methods, we provide evidence that it is possible to further increase the performance, under the condition that an image similar to the input image can be found in the training dataset. Our results might have an impact for critical applications which require robust and relevant saliency maps.
Models for 3D video quality assessment
Participants : Darya Khaustova, Olivier Le Meur.
This work is carried out in collaboration with Orange labs. The goal is to design objective metrics for quality assessment of 3D video content, by establishing links between human visual perception (visual comfort) and video parameters such as quality and depth quantity, and between visual comfort and visual attention. In 2013 we investigated the differences in 2D visual attention in comparison with 3D visual attention [31] . In 2014, we have focused on the design of an objective stereoscopic quality metric. In stereoscopic video quality, the assessment of spatial and temporal distortions by conventional quality metrics became incomplete because of the added depth dimension. Improperly captured or rendered, depth information can induce visual discomfort, impacting the overall video 3D QoE quality independently of image quality. The model is based on perceptual thresholds, namely visual annoyance, and acceptability. The visual annoyance threshold defines the boundary between annoying and not annoying sensation: 50% of subjects consider a stimulus annoying and 50% as not annoying. Acceptability determines the viewer's expectation level for the perceived video quality in a certain context and situation (inspired by the acceptability for the customer defined as an adequate service.
In order to compute the quality score, the proposed metric requires in input the distortion level of a technical and particular parameter, annoyance threshold and acceptability threshold of the targeted parameter. The performance of proposed objective mode is evaluated by considering five view asymmetries with five degradation levels. Generated contents were assessed by 30 subjects for each asymmetry (focal length mismatch, vertical shift, and rotation, green and white level reduction). The results of the subjective test have demonstrated that it is possible to classify detected problem to one of the objective categories using corresponding acceptability and visual annoyance thresholds.
Epitome-based video representation
Participants : Martin Alain, Christine Guillemot.
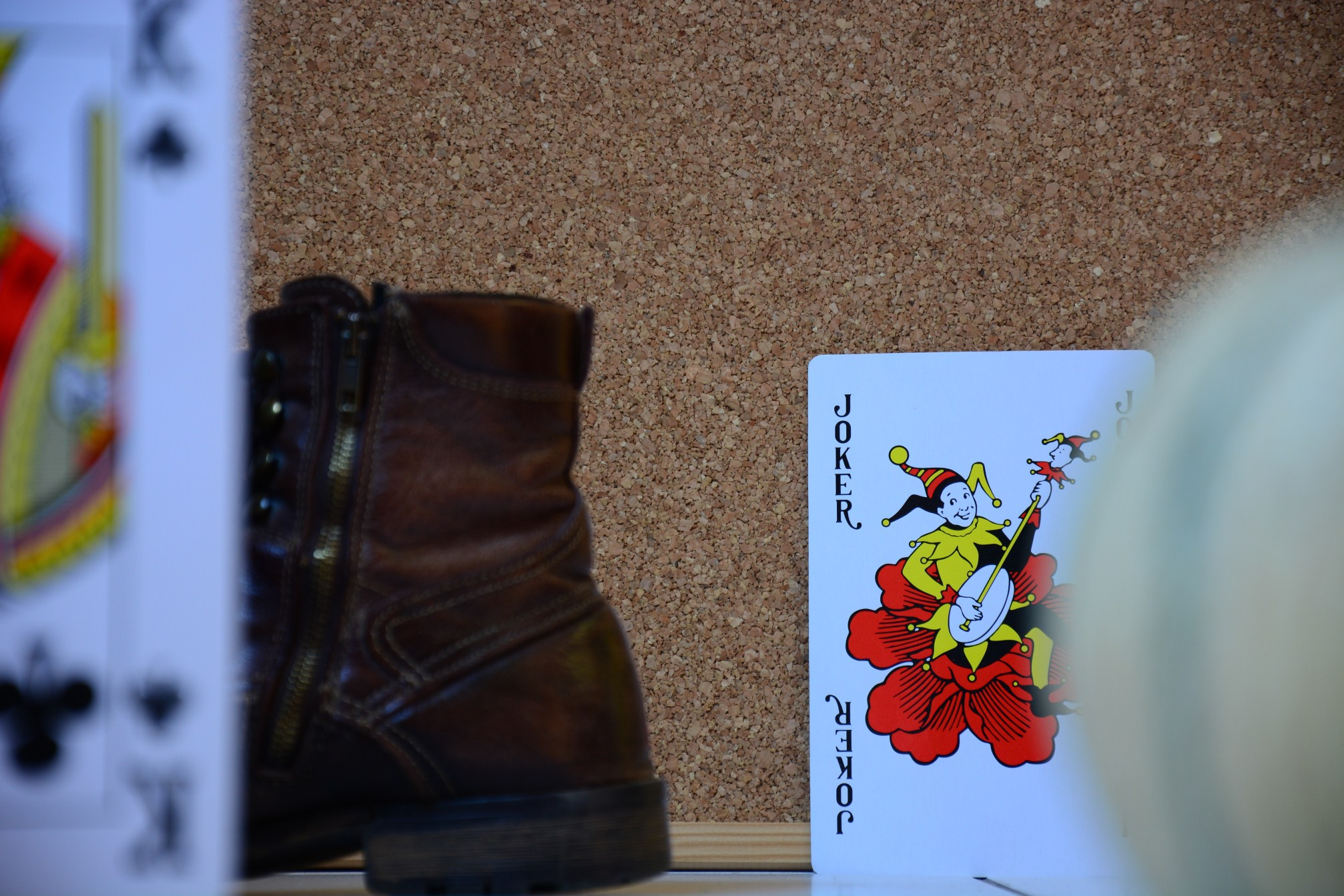
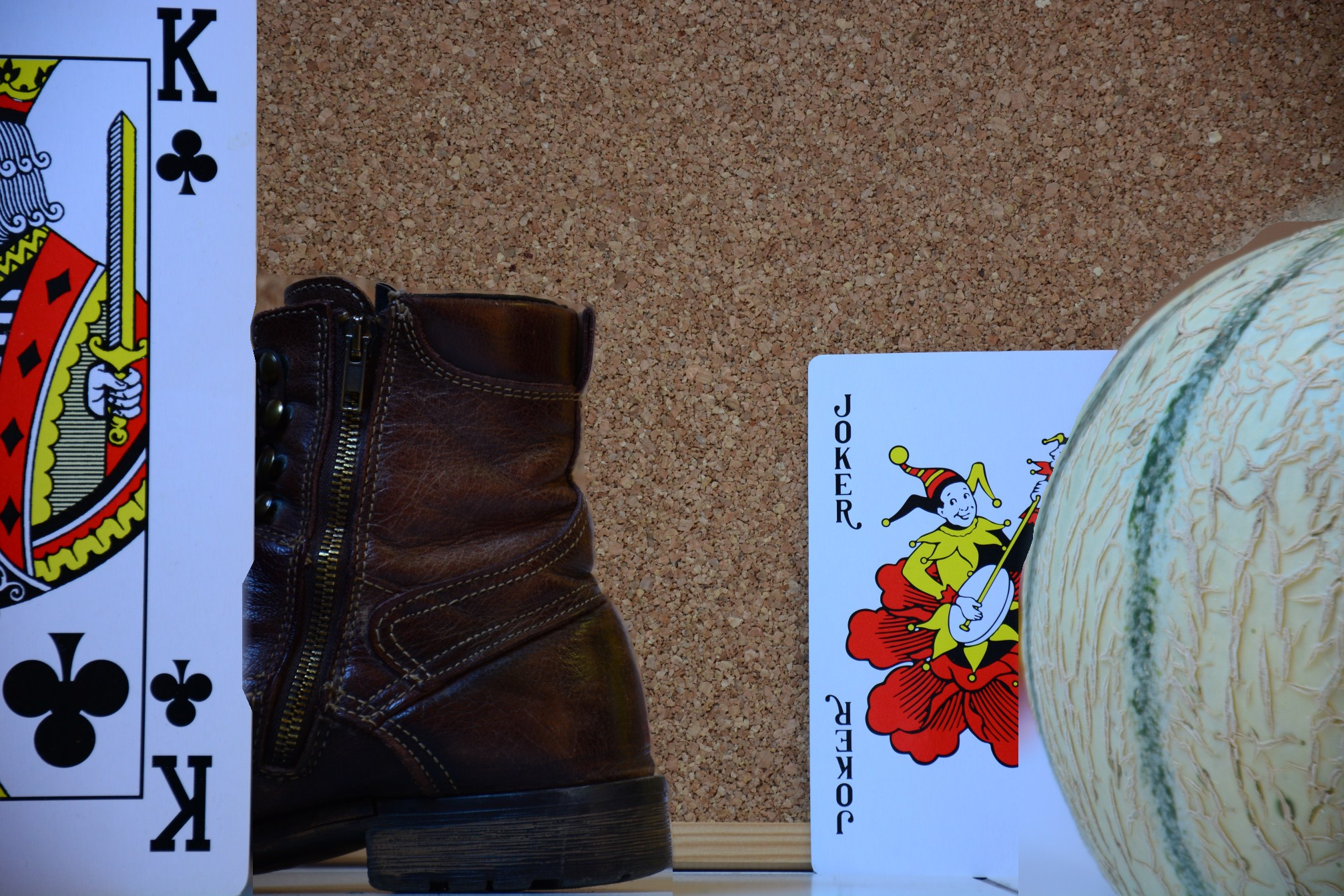
In 2014, we have developed fast methods for constructing epitomes from images. An epitome is a factorized texture representation of the input image, and its construction exploits self-similarities within the image. Known construction methods are memory and time consuming. The proposed methods, using dedicated list construction on one hand and clustering techniques on the other hand, aim at reducing the complexity of the search for self-similarities. Experiments show that interesting complexity results can be obtained without degrading the epitome quality for both proposed methods. By limiting the number of exhaustive searches we limit the memory occupation and the processing time, while keeping a good epitome quality (down to 18.08 % of the original memory occupation and 41.39 % of the original processing time) [25] . As an example, images reconstructed using the different techniques are visible in Fig. 1 . The epitome construction method is currently being extended from still images to groups of images in video sequences. Denoising and super-resolution algorithms based on the constructed epitomes are also under study.
|
Light field tomographic reconstruction from a fixed camera focal stack
Participants : Christine Guillemot, Elif Vural.
Thanks to the internship of Antoine Mousnier (student at Ecole Centrale Lyon), we have developed a novel approach to partially reconstruct high-resolution 4D light fields from a stack of differently focused photographs taken with a fixed camera. First, a focus map is calculated from this stack using a simple approach combining gradient detection and region expansion with graph cut. Then, this focus map is converted into a depth map thanks to the calibration of the camera. We proceed after this with the tomographic reconstruction of the epipolar images by back-projecting the focused regions of the scene only. We call it masked back-projection. The angles of back-projection are calculated from the depth map. Thanks to the high angular resolution we achieve, we are able to render puzzling perspective shifts although the original photographs were taken from a single fixed camera at a fixed position and render images with extended focus (see Fig. 2 ). To the best of our knowledge, our method is the first one to reconstruct a light field by using a focal stack captured with an ordinary camera at a fixed viewpoint.