

Section: New Results
Global Tracker : An Online Evaluation Framework to Improve Tracking Quality
Participants : Julien Badie, Slawomir Bak, Duc Phu Chau, François Brémond, Monique Thonnat.
keywords: online quality estimation, re-identification, tracking results improvements
This work addresses the problem of estimating the reliability of a tracking algorithm during runtime and correcting the anomalies found. Evaluating and tuning a tracking algorithm generally requires multiple runs and ground truth. The proposed framework called global tracker overcomes these limitations by combining an online evaluation algorithm and a recovering post-process.
Designing an evaluation framework that does not require ground truth has many different applications. One of them is to provide feedback to the tracking algorithm that can tune its own parameters to improve the results on the next frame. Another convenient application is to filter the reliable information from the tracking algorithm that can be used by the next processing step such as event recognition or re-identification.
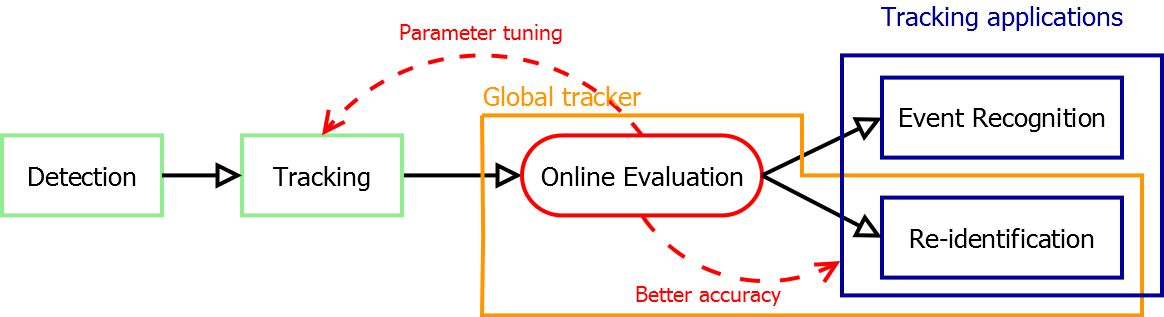
The proposed online evaluation framework is based on control features. It means that several representative values or characteristics (the features) are chosen to monitor what is happening. Control features are the features that the online evaluation framework uses to monitor the status of the tracked objects. The framework is divided into two steps :
-
computing the control features related to each tracked object of the scene on the current frame
-
detecting the possible anomalies and then classifing them into two categories : anomalies due to tracking errors or benign anomalies (when a person leaves the scene or cross an obstacle for example).
This approach has been tested on two datasets (PETS 2009 and Caviar) with two different tracking algorithms (a multi-feature tracker and a tracker based on graph partitioning). The results show that the global tracker, even associated with a tracking algorithm that does not have good results, can perform as well as the state of the art.
| Methods | MOTA | MOTP |
| Heili et al. [72] | 0.89 | 0.66 |
| Zamir et al. [96] | 0.90 | 0.69 |
| Milan et al. [77] | 0.90 | 0.74 |
| Tracker 1 | 0.62 | 0.63 |
| Tracker 1 + global tracker | 0.85 | 0.71 |
| Tracker 2 | 0.85 | 0.74 |
| Tracker 2 + global tracker | 0.90 | 0.74 |
| Method | MT (%) | PT (%) | ML (%) |
| Li et al. [76] | 84.6 | 14.0 | 1.4 |
| Kuo et al. [74] | 84.6 | 14.7 | 0.7 |
| Tracker 1 | 78.3 | 16.0 | 5.7 |
| Tracker 1 + global tracker | 86.4 | 8.3 | 5.3 |
This approach has been published in AVSS 2014 [33] which details the differences between real errors and benign anomalies.