

Section: New Results
Analysis and modeling for compact representation and navigation
3D modelling, multi-view plus depth videos, Layered depth images (LDI), 2D and 3D meshes, epitomes, image-based rendering, inpainting, view synthesis
Visual attention
Participants : Pierre Buyssens, Olivier Le Meur.
Visual attention is the mechanism allowing to focus our visual processing resources on behaviorally relevant visual information. Two kinds of visual attention exist: one involves eye movements (overt orienting) whereas the other occurs without eye movements (covert orienting). Our research activities deals with the understanding and modeling of overt attention as well as saliency-based image editing. These research activities are described in the following sections.
Saccadic model: Most of the computation models of visual attention output a 2D static saliency map. This single topographic saliency map which encodes the ability of an area to attract our gaze is commonly computed from a set of bottom-up visual features. Although the saliency map representation is a convenient way to indicate where we look within a scene, these models do not completely account for the complexities of our visual system. One obvious limitation concerns the fact that these models do not make any assumption about eye movements and viewing biases. For instance, they implicitly make the hypothesis that eyes are equally likely to move in any direction.
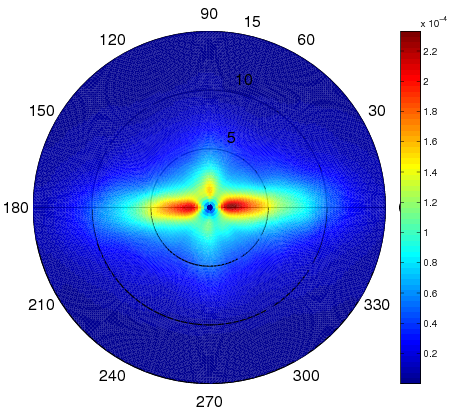
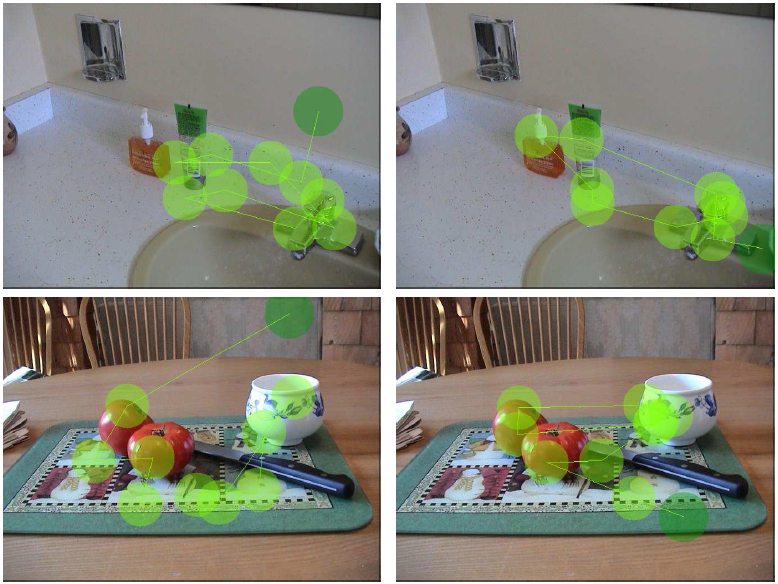
There is evidence for the existence of systematic viewing tendencies. Such biases could be combined with computational models of visual attention in order to better predict where we look. Such a model, predicting the visual scanpath of observer, is termed as saccadic model. We recently propose a saccadic model ([20] ) that combines bottom-up saliency maps, viewing tendencies and short-term memory. The viewing tendencies are related to the fact that most saccades are small (less than 3 degrees of visual angle) and oriented in the horizontal direction. Figure 1 (a) illustrates the joint probability distribution of saccade amplitudes and orientations. Examples of predicted scanpaths are shown in Figure 1 (b). We demonstrated that the proposed model outperforms the best state-of-the-art saliency models.
In the future, the goal is to go further by considering that the joint distribution of saccade amplitudes and orientations is spatially variant and depends on the scene category.
|
Perceptual-based image editing: Since the beginning of October, we have started new studies related to perceptual-based image editing. The goal is to combine the modelling of visual attention with image/video editing methods. More specifically it aims at altering images/video sequences in order to attract viewers attention over specific areas of the visual scene. We intend to design new computational editing methods for emphasizing and optimizing the importance of pre-defined areas of the input image/video sequence. There exist very few studies in the literature dealing with this problem. Current methods simply alter the content by using blurring operation or by recoloring the image locally so that the focus of attention falls within the pre-defined areas of interest. One avenue for improving current methods is to minimize a distance computed between a user's defined visual scanpath and predicted visual scanpath. The content would be edited (i.e. recoloring, region rescaling, local contrast/resolution adjustment, removing disturbing object, etc) in an iterative manner in order to move the focus of attention towards the regions selected by the user.
Epitome-based video representation
Participants : Martin Alain, Christine Guillemot.
In 2014, we have developed fast methods for constructing epitomes from images. An epitome is a factorized texture representation of the input image, and its construction exploits self-similarities within the image. Known construction methods are memory and time consuming. The proposed methods, using dedicated list construction on one hand and clustering techniques on the other hand, aim at reducing the complexity of the search for self-similarities.
In 2015, we have developed methods for quantization noise removal (after decoding) exploiting the epitome representations together with local learning of either LLE (locally linear embedding) weights, which has proved to be a powerful tool for prediction [14] , or using linear mapping functions between original and noisy patches. Compared to classical denoising methods which, most of the time, assume additive white Gaussian noise, the quantization turns out to be correlated to the signal which makes the problem more difficult. The methods have been experimented both in the contexts of single layer encoding and scalable encoding. The same methodology has been applied to super-resolution learning this time mapping functions between the low resolution and high resolution spaces in which lie the patches of the epitome [32] .
Graph-based multi-view video representation
Participants : Christine Guillemot, Thomas Maugey, Mira Rizkallah, Xin Su.
One of the main open questions in multiview data processing is the design of representation methods for multiview data, where the challenge is to describe the scene content in a compact form that is robust to lossy data compression. Many approaches have been studied in the literature, such as the multiview and multiview plus depth formats, point clouds or mesh-based techniques. All these representations contain two types of data: i) the color or luminance information, which is classically described by 2D images; ii) the geometry information that describes the scene 3D characteristics, represented by 3D coordinates, depth maps or disparity vectors. Effective representation, coding and processing of multiview data partly rely on a proper representation of the geometry information. The multiview plus depth (MVD) format has become very popular in recent years for 3D data representation. However, this format induces very large volumes of data, hence the need for efficient compression schemes. On the other hand, lossy compression of depth information in general leads to annoying rendering artefacts especially along the contours of objects in the scene.
Instead of lossy compression of depth maps, we consider the lossless transmission of a geometry representation that captures only the information needed for the required view reconstructions. Our goal is to transmit “just enough” geometry information for accurate representation of a given set of views, and hence better control the effect of geometry lossy compression.
|
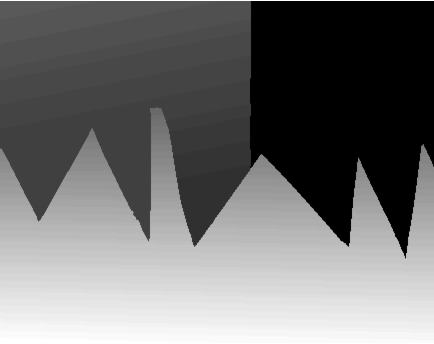
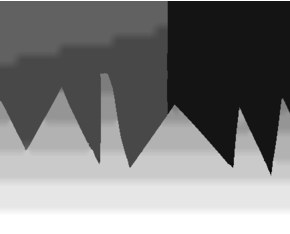
More particularly, in [23] , we proposed a new Graph-Based Representation (GBR) for geometry information, where the geometry of the scene is represented as connections between corresponding pixels in different views. In this representation, two connected pixels are neighboring points in the 3D scene. The graph connections are derived from dense disparity maps and provide just enough geometry information to predict pixels in all the views that have to be synthesized.
GBR drastically simplifies the geometry information to the bare minimum required for view prediction. This “task-aware” geometry simplification allows us to control the view prediction accuracy before coding compared to baseline depth compression methods (Fig. 2 ). This work has first been carried out for multi-view configurations, in which cameras are parallel. We are currently investigating the extension of this promising GBR to complex camera transitions. An algorithm has already been implemented for two views and is being extended for multiple views. The next steps will be to develop color coding tools adapted to these graph structures.