

Section: New Results
Protocols and Models for Wireless Networks - Application to VANETs
Protocols for VANETs
TRPM: a TDMA-aware routing protocol for multi-hop communications in VANETs
Participants : Mohamed Elhadad Or Hadded, Paul Muhlethaler, Anis Laouiti.
The main idea of TRPM is to select the next hop using the vehicle position and the time slot information from the TDMA scheduling. Like the GPSR protocol, we assume that each transmitting vehicle knows the position of the packet's destination. In TRPM, the TDMA scheduling information and the position of a packet's destination are sufficient to make correct forwarding decisions at each transmitting vehicle. Specifically, if a source vehicle is moving in area , the locally optimal choice of next hop is the neighbor geographically located in area or according to the position of the packet's destination. As a result, the TDMA slot scheduling obtained by DTMAC can be used to determine the set of next hops that are geographically closer to the destination. In fact, each vehicle that is moving in the area can know the locally optimal set of next hops that are located in adjacent areas or by observing the set of time slots or , respectively. We consider the same example presented above when vehicle G as the destination vehicle that will broadcast a message received from vehicle A. As shown in Figure 3, only two relay vehicles are needed to ensure a multi-hop path between vehicle A and G (one relay node in the area and another one in the area ).
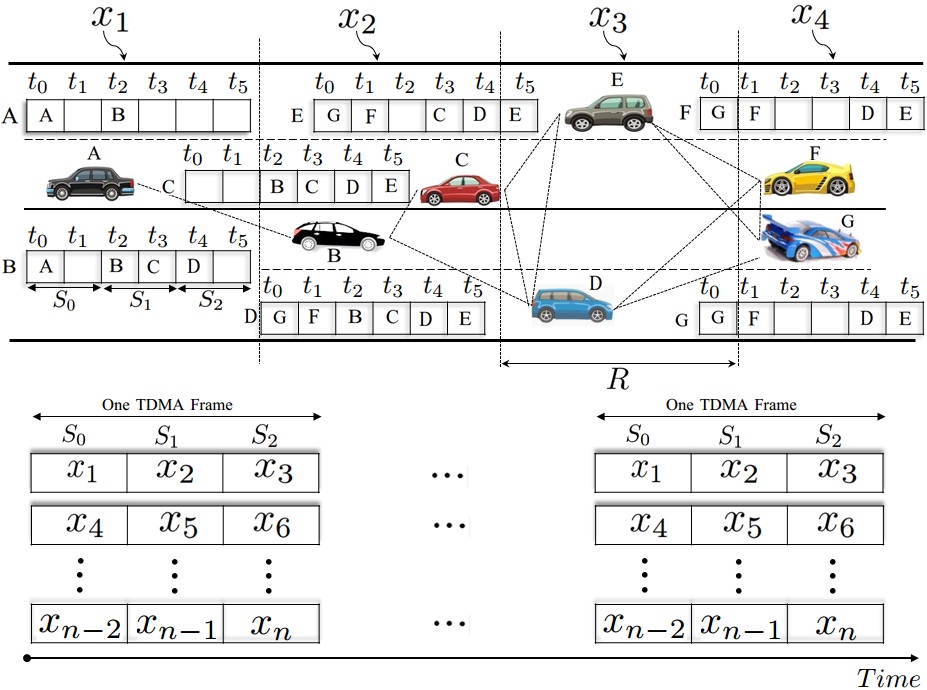
In the following, the DTMAC protocol has been used by the vehicles to organize the channel access. The TDMA slot scheduling obtained by DTMAC is illustrated in Figure 3. Firstly, vehicle A forwards a packet to B, as vehicle A uses its frame information to choose a vehicle that is accessing the channel during the set . Upon receiving the packet for forwarding, vehicle B will choose by using its frame information a vehicle that's accessing the channel during the set of time slots (say vehicle D). Then, vehicle D will forward the packet to G, as G is moving in area (accessing the channel during the set ) and it is the direct neighbor of vehicle D. By using DTMAC as the MAC layer, we can note that the path A-B-D-G is the shortest, in terms of the number of hops as well as the end-to-end delay which is equal to 6 time slots (2 time slots between and as is the transmission slot for vehicle B, then 2 time slots between and as is the transmission slot for vehicle D and finally 2 time slots between and as is the transmission slot in which vehicle G will broadcast the message received from vehicle A).
The idea of TRPM [16] is the following . Whenever a vehicle accessing the channel during the set wants to send/forward an event-driven safety message, it constructs two sets of candidate forwarders based on its frame information FI as follows, where indicates the time slot reserved by vehicle .
-
// The set of vehicles that are moving in the adjacent right-hand area.
-
// The set of vehicles that are moving in the adjacent left-hand area.
Each source vehicle uses the position of a packet's destination and the TDMA scheduling information to make packet forwarding decisions. In fact, when a source vehicle is moving behind the destination vehicle, it will select a next hop relay that belongs to set ; when the transmitter is moving in front of the destination vehicle, it will select a forwarder vehicle from those in set . For each vehicle that will send or forward a message, we define the normalized weight function WHS (Weighted next-Hop Selection) which depends on the delay and the distance between each neighboring vehicle . WHS is calculated as follows:
Where:
-
is one of the neighbors of vehicle , which represents the potential next hop that will relay the message received from vehicle .
-
is the gap between the sending slot of vehicle and the sending slot of vehicle .
-
is the distance between the two vehicles and , and is the communication range.
-
is a weighted value in the interval that gives more weight to either distance or delay. When is high, more weight is given to the delay. Otherwise, when is small, more weight is given to the distance.
We note that the two weight factors and are in conflict. For simplicity, we assume that all the factors should be minimized. In fact, the multiplication of the second weight factor by (-1) allows us to transform a maximization to a minimization. Therefore, the forwarding vehicle for is the vehicle that is moving in an adjacent area for which is the lowest value.
The simulation results reveal that our routing protocol significantly outperforms other protocols in terms of average end-to-end delay, average number of relay vehicles and the average delivery ratio.
We have developed an analytical model to evaluate the packet loss rate and the end-to-end delay for safety messages transmitted in vehicular networks over long distances when TRPM is used as a routing protocol, see refhadded:hal-01617924. Comparisons of realistic simulation results, carried out using ns-2 and MOVE/SUMO, and analytical results show that the analytical model proposed provides close approximations for the end-to-end delay and packet loss rate for the different scenarios considered.
Trust-CTMAC: A Trust Based Scheduling Algorithm
Participants : Mohamed Elhadad Or Hadded, Paul Muhlethaler, Anis Laouiti.
In Vehicular Ad hoc NETworks, communication is possible both between the vehicles themselves and between the vehicles and the infrastructure. These applications need a reliable and secure broadcast system that takes into consideration the security issues in VANETs, the high speed of nodes and the strict QoS requirements. For these reasons, we propose a trust-based and centralized TDMA-based MAC protocol. Our solution will permit Road Side Units (RSUs) to manage time slot assignment by avoiding malicious nodes and by minimizing message collision. The experiments carried out and the results obtained prove the effectiveness of our approach.
We present a trust based centralized TDMA scheduling mechanism which aims to isolate and prevent malicious vehicles from accessing the channel. This is accomplished by serving only the slot reservation requests of vehicles that have trust values greater than a trust threshold. In Trust-CTMAC, each RSU maintains additional data structure called Trust Counters Table (TCT) and Malicious Vehicles Table (MVT) for all vehicles within its communication range based on the list of properties shown in Table 1. The TCT and the FI information are periodically broadcasted by the for ecah time interval of . So each vehicle can identify and isolate malicious vehicles among all neighboring nodes based on the TCT information received from its RSU, which can protect the radio channel from any potential damage caused by the malicious vehicles. An RSU declares a vehicle as a malicious node if the corresponding trust value falls below a trust threshold.
| Threat Name | Description | Level |
| Message Saturation | A huge number of a vehicle packets do not include any form of identification information | 3 (high) |
| False GNSS (Global Navigation Satellite System) Signals | A vehicle is sending messages with false geographic information | 3 (high) |
| Slot reservation attack | A vehicle requests different slots during the same frame | 3 (high) |
| Malicious MAC behavior | A vehicle is sending data in another slot different to its reserved one | 4 (Critical) |
| Malicious isolation | Some vehicle functionalities are disabled (create, process, receive and send messages) caused by the installation of a malware | 3 (high) |
| Denial of access to incoming messages | A vehicle may be unlinked if it receives a huge number of messages. | 4 (Critical) |
| Frame information poisoning | The frame information is falsified by a vehicle | 3 (high) |
| Identity spoofing | A vehicle is using a wrong node type in order to act as an RSU | 3 (high) |
A Flooding-Based Location Service in VANETs
Participants : Selma Boumerdassi, Paul Muhlethaler.
This work has been done in collaboration with Eric Renault, Telecom Sud Paris.
We have designed and analyzed a location service for VANETs; such a service can be used in Location-based routing protocols for VANETs. Our protocol is a proactive flooding-based location service that drastically reduces the number of update packets sent over the network as compared to traditional flooding-based location services. This goal is achieved by partially forwarding location information at each node. A mathematical model and some simulations are proposed to show the effectiveness of this solution. Cases for 1D, 2D and 3D spaces are studied for both deterministic and probabilistic forwarding decisions. We compare our protocol with the Multi-Point Relay (MPR) technique which is used in the OLSR protocol and determine the best technique according to the network conditions.
Models for Wireless Networks and VANETs
Performance analysis of IEEE 802.11 broadcast schemes with different inter-frame spacings
Participants : Younes Bouchaala, Paul Muhlethaler, Nadjib Achir.
This work has been done in collaboration with Oyunchimeg Shagdar (Vedecom).
We have started to build a model which analyzes the performance of IEEE 802.11p managing different classes of priorities. The differentiation of traffic streams is obtained with different inter-frame spacings: AIFSs (for Arbitration Inter Frame Spacings) and with different back-off windows: CWs (for Collision Windows). This model is based on a Markov model where the state is the remaining number of idle slots that a packet of a given class has to wait before transmission. However, in addition to this Markov model for which we compute a steady state we also consider the Markov chain which counts the number of idle slots after the smallest AIFS. As a matter of fact the probability these states are not evenly distributed since with different AIFSs the arrival rate is not constant when the number of idle slots experienced after the smallest AIFS varies. The resolution of the steady state of these two inter-mixed Markov chains lead to non linear and intertwined equations that can be easily solved with a software such as Maple. With the model we have obtained, we can compute the delivery rate of packets of different classes and show the influence of system parameters: AIFSs and CWs. The preliminary results show a a very strong influence of different AIFSs on the performance for each traffic streams, see [13].
Model and optimization of CSMA
Participants : Younes Bouchaala, Paul Muhlethaler, Nadjib Achir.
This work has been done in collaboration with Oyunchimeg Shagdar (Vedecom).
We have studied the maximum throughput of CSMA in scenarios with spatial reuse. The nodes of our network form a Poisson Point Process (PPP) of a one- or two-dimensional space. The one-dimensional PPP well represents VANETs. To model the effect of Carrier Sense Multiple Access (CSMA), we give random marks to our nodes and to elect transmitting nodes in the PPP we choose the nodes with the smallest marks in their neighborhood, this is the Matern hardcore selection process. To describe the signal propagation, we use a signal with power-law decay and we add a random Rayleigh fading. To decide whether or not a transmission is successful, we adopt the Signal-over-Interference Ratio (SIR) model in which a packet is correctly received if its transmission power divided by the interference power is above a capture threshold. We assume that each node in our PPP has a random receiver at a typical distance. We choose the average distance to its closest neighbor. We also assume that all the network nodes always have a pending packet. With these assumptions, we analytically study the density of throughput of successful transmissions and we show that it can be optimized with the carrier-sense threshold. The model makes it possible to analytically compute the performance of a CSMA system and gives interesting results on the network performance such as the capture probability when the throughput is optimized, and the effect on a non-optimization of the carrier sense threshold on the throughput. We can also study the influence of the parameters and see their effects on the overall performance. We observe a significant difference between 2D an 1D networks.
We have built two models to compare the spatial density of successful transmissions of CSMA and Aloha. To carry out a fair comparison, we optimize both schemes by adjusting their parameters. For spatial Aloha, we can adapt the transmission probability, whereas for spatial CSMA we have to find the suitable carrier sense threshold. The results obtained show that CSMA, when optimized, outperforms Aloha for nearly all the parameters of the network model values and we evaluate the gain of CSMA over Aloha. We also find interesting results concerning the effect of the model parameters on the performance of both Aloha and CSMA. The closed formulas we have obtained provide immediate evaluation of performance, whereas simulations may take minutes to give their results, see [14]. Even if Aloha and CSMA are not recent protocols, this comparison of spatial performance is new and provides interesting and useful results.
For Aloha networks, when we study transmissions over the average distance to the closest neighbor, the optimization does not depend on the density of nodes, which is a very interesting property. Thus in Aloha networks, the density of successful transmissions easily scales linearly in when we vary whereas in CSMA networks the protocol must be carefully tuned to obtain this scaling.
With CSMA, we have also shown that this density of throughput (when optimized) scales with the density of nodes if we study the throughput is measured between the nodes to their closest neighbors. We have mathematically justified this property.
Adaptive CSMA
Participants : Nadjib Achir, Younes Bouchaala, Paul Muhlethaler.
This work has been done in collaboration with Oyunchimeg Shagdar (Vedecom).
Using the model we have built for CSMA, we have shown that when optimized with the carrier sense detection threshold , the probability of transmission for a node in the CSMA network does not depend on the density of nodes . In other words when the CSMA is optimized to obtain the largest density of successful transmissions (communication from nodes to their neighbors), is constant. We have verified this statement on several examples and we think that a formal proof of this remark is possible using scaling arguments. The average access delay is a direct function of the probability of transmission . Thus the average delay when the carrier sense detection threshold is optimized is a constant which does not depend on . A stabilization algorithm which adapts to reach the can thus be envisioned. Another stabilization algorithm adapts so that the mean number of neighbors of a node is a given number of nodes which only depends on the network parameters and not on the network density. A third stabilization algorithm adapts so that the channel busy ratio (CBR) is near a given target.
We have justified theoretically all these algorithms and simulated their behavior. The simulations well justify the theoretical analysis.
Optimizing spatial throughput in device-to-device networks
Participants : Bartek Blaszczyszyn, Paul Keeler, Paul Muhlethaler.
Results are presented for optimizing device-to-device communications in cellular networks, while maintaining spectral efficiency of the base-station-to-device downlink channel. We build upon established and tested stochastic geometry models of signal-to-interference ratio in wireless networks based on the Poisson point process, which incorporate random propagation effects such as fading and shadowing. A key result is a simple formula, allowing one to optimize the device-to-device spatial throughput by suitably adjusting the proportion of active devices, see [19]. These results can lead to further investigation as they can be immediately applied to more sophisticated models such as studying multi-tier network models to address coverage in closed access networks.
Model and analysis of Coded Slotted Aloha (CSA) with capture
Participants : Ebrahimi Khaleghi, Cedric Adjih, Paul Muhlethaler.
This work has been done in collaboration with Amira Alloum, Nokia Bell Labs.
Motivated by scenario requirements for 5G cellular networks, we have studied one among the protocols candidate to the massive random access: the family of random access methods known as Coded Slotted ALOHA (CSA). Recent body of research has explored aspects of such methods in various contexts, but one aspect has not been fully taken into account: the impact of the path loss, which is a major design constraint in long-range wireless networks. We have explored the behavior of CSA, by focusing on the path loss component correlated to the distance to the base station. Path loss provides opportunities for capture, improving the performance of CSA. We have revised methods for estimating CSA behavior. We have provided bounds of performance and derived the achievable throughput. We have extensively explore the key parameters, and their associated gain (experimentally). Our results has shed light on the open question of the optimal distribution of repetitions in actual wireless networks.
Mobility Prediction in Vehicular Networks : An Approach through Hybrid Neural Networks under Uncertainty
Participants : Soumya Banerjee, Samia Bouzefrane, Paul Muhlethaler.
Conventionally, the exposure regarding knowledge of the inter vehicle link duration is a significant parameter in Vehicular Networks to estimate the delay during the failure of a specific link during the transmission. However, the mobility and dynamics of the nodes is considerably higher in a smart city than on highways and thus could emerge a complex random pattern for the investigation of the link duration, referring all sorts of uncertain conditions. There are existing link duration estimation models, which perform linear operations under linear relationships without imprecise conditions. Anticipating, the requirement to tackle the uncertain conditions in Vehicular Networks, this paper presents a hybrid neural network-driven mobility prediction model. The proposed hybrid neural network comprises a Fuzzy Constrained Boltzmann machine (FCBM), which allows the random patterns of several vehicles in a single time stamp to be learned. The several dynamic parameters, which may make the contexts of Vehicular Networks uncertain, could be vehicle speed at the moment of prediction, the number of leading vehicles, the average speed of the leading vehicle, the distance to the subsequent intersection of traffic roadways and the number of lanes in a road segment. In this paper, a novel method of hybrid intelligence is initiated to tackle such uncertainty. Here, the Fuzzy Constrained Boltzmann Machine (FCBM) is a stochastic graph model that can learn joint probability distribution over its visible units (say n) and hidden feature units (say m). It is evident that there must be a prime driving parameter of the holistic network, which will monitor the interconnection of weights and biases of the Vehicular Network for all these features. The highlight of this paper is that the prime driving parameter to control the learning process should be a fuzzy number, as fuzzy logic is used to represent the vague and and uncertain parameters. Therefore, if uncertainty exists due to the random patterns caused by vehicle mobility, the proposed Fuzzy Constrained Boltzmann Machine could remove the noise from the data representation. Thus, the proposed model will be able to predict robustly the mobility in VANET, referring any instance of link failure under Vehicular Network paradigm.
Reliable routing architecture
Participants : Mohamed Hadded, Anis Laouiti, Paul Muhlethaler.
Flooding scheme represents one of the fundamental operation in wireless mesh networks. It plays an important role in the design of network and application protocols. Many existing flooding solutions have been studied to address the flooding issues in mesh networks. However, most of them are not able to operate efficiently where there are network equipment failures. In this work, we consider nodes failures and we build the flooding tree the maximum expectation of the throughput (taking into account the potential unavailability of certain nodes). After a formal stochastic definition of the problem, we show how to use a tabu search algorithm, to solve this optimization problem.