Section: Overall Objectives
Objectives
For engineers, a wide variety of information cannot be directly obtained through measurements. Some parameters (constants of an electrical actuator, delay in a transmission, etc.) or internal variables (robot's posture, torques applied to a robot, localization of a mobile robot, etc.) are unknown or unmeasured. In addition, usually the signals from sensors are distorted and tainted by measurement noises. In order to simulate, to control or to supervise processes, and to extract information conveyed by the signals, one has to estimate parameters or variables.
Estimation techniques are, under various guises, present in many parts of control, signal processing and applied mathematics. Such an important area gave rise to a huge international literature. From a general point of view, the performance of an estimation algorithm can be characterized by three indicators:
-
The computation time (the time needed to obtain the estimation). Obviously, the estimation algorithms should have as small as possible computation time in order to provide fast, real-time, on-line estimations for processes with fast dynamics (for example, a challenging problem is to make an Atomic Force Microscope work at GHz rates).
-
The algorithm complexity (the easiness of design and implementation). Estimation algorithms should have as low as possible algorithm complexity, in order to allow an embedded real-time estimation (for example, in networked robotics, the embedded computation power is limited and can be even more limited for small sensors/actuators devices). Another question about complexity is: can an engineer appropriate and apply the algorithms? For instance, an algorithm application is easier if the parameters have a physical meaning w.r.t. the process under study.
-
The robustness. The estimation algorithms should exhibit as much as possible robustness with respect to a large class of measurement noises, parameter uncertainties, discretization steps and other issues of numerical implementation. A complementary point of view on robustness is to manage a compromise between existence of theoretical proofs versus universalism of the algorithm. In the first case, the performance is guaranteed in a particular case (a particular control designed for a particular model). In the second case, an algorithm can be directly applied in “most of the cases", but it may fail in few situations.
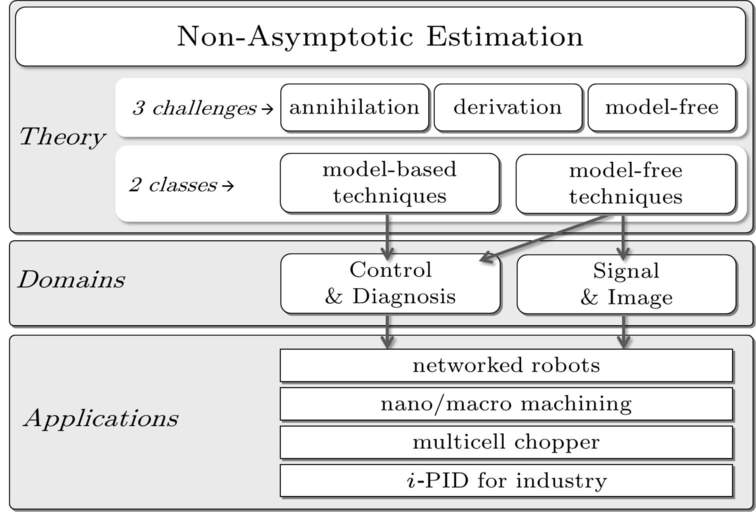
Within the very wide area of estimation, Non-A addresses 3 particular theoretical challenges (see the upper block “Theory” of Figure 1):
1) Design annihilators for some general class of perturbations;
2) Estimate on-line the derivatives of a signal;
3) Control without sophisticated models.
All of them are connected with the central idea of designing or exploiting algorithms with the finite-time convergence property. In particular, the non-asymptotic estimation techniques (numerical differentiation, finite-time differentiators or observers) constitute a central objective of the project, explaining the name Non-Asymptotic estimation for on-line systems. Below, these 3 challenges will be shortly described in relation to the above indicators.
The researches developed by Non-A are within the continuity of the project-team ALIEN in what concerns the algebraic tools that are developed for finite-time estimation purposes. However, Non-A also aims at developing complementary estimation techniques, still aiming at the finite-time performance but based on the so-called higher-order sliding mode algorithms, interval estimation techniques and, as well as, fixed-time algorithms.
Non-A also wants to confront these theoretical challenges with some application fields (shown on the bottom of Figure 1): Networked robots, Nano/macro machining, Multicell chopper, i-PID for industry. Today, most of our effort (i.e., engineering staff) is devoted to the first item, according to the theme `Internet of Things' promoted by Inria in its Strategic Plan for the Lille North-Europe research center. Indeed, WSNR (Wireless Sensor and Robot Networks) integrate mobile nodes (robots) that extends various aspects of the sensor network.