Section:
New Results
Inverse simulation for Robotic control of needle insertion
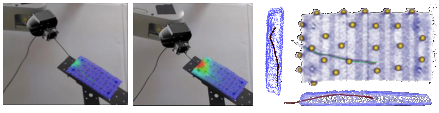
We recently published in a numerical method allowing for automatic control of a robot during needle insertion procedures (see Fig. 7).
Our approach is to develop control models allowing for the correction and prediction of the deformation of structures (needle, tissues or the robot itself) and to adapt the behavior of the robot in order to reach an objective.
We showed that inverse steps can be used to control an articulated robot while considering deformations of structures during needle insertion.
The method has been used for a needle insertion inside a polyurethane foam using a Mitsubishi RV1A anthropomorphic robot arm.
During the insertion vertical and lateral deformations were generated (see Fig. 7) leading to significant modification of the undeformed trajectory, important bending of the needle and even an off-plane shift between the base of the needle and the insertion point.
Despite these strong modifications, the method was able to maintain the tip of the needle within the thickness of 1 cm of the foam and followed the desired curved path with accuracy lower than 1 mm without any human intervention.
Figure
7. Robotic control based on inverse finite element simulations for needle insertion in deform-able structures. The models are registered in real-time using makers and infrared image-tracking system. We measured an average distance of 1.2 mm between needle's (red) and the desired trajectory (green).
|
|