

Section: New Results
Human-Robot Interaction
Audio-visual fusion raises interesting problems whenever it is implemented onto a robot. Robotic platforms have their own hardware and software constraints. In addition, commercialized robots have economical constraints which leads to the use of cheap components. A robot must be reactive to changes in its environment and hence it must take fast decisions. This often implies that most of the computing resources must be onboard of the robot.
Over the last decade we have tried to do our best to take these constraints into account. Starting from our scientific developments, we put a lot of efforts into robotics implementations. For example, the audio-visual fusion method described in [2] used a specific robotic middleware that allowed fast communication between the robot and an external computing unit. Subsequently we developed a powerful software package that enables distributed computing. We also put a lot of emphasis on the implementation of low-level audio and visual processing algorithms. In particular, our single- and multiple audio source methods were implemented in real time onto the humanoid robot NAO [25], [50]. The multiple person tracker [4] was also implemented onto our robotic platforms [5], e.g. Figure 5.
|
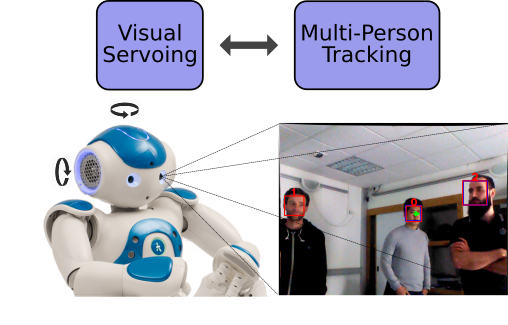
More recently, we investigated the use of reinforcement learning (RL) as an alternative to sensor-based robot control [45], [37]. The robotic task consists of turning the robot head (gaze control) towards speaking people. The method is more general in spirit than visual (or audio) servoing because it can handle an arbitrary number of speaking or non speaking persons and it can improve its behavior online, as the robot experiences new situations. An overview of the proposed method is shown in Fig. 6. The reinforcement learning formulation enables a robot to learn where to look for people and to favor speaking people via a trial-and-error strategy.
|
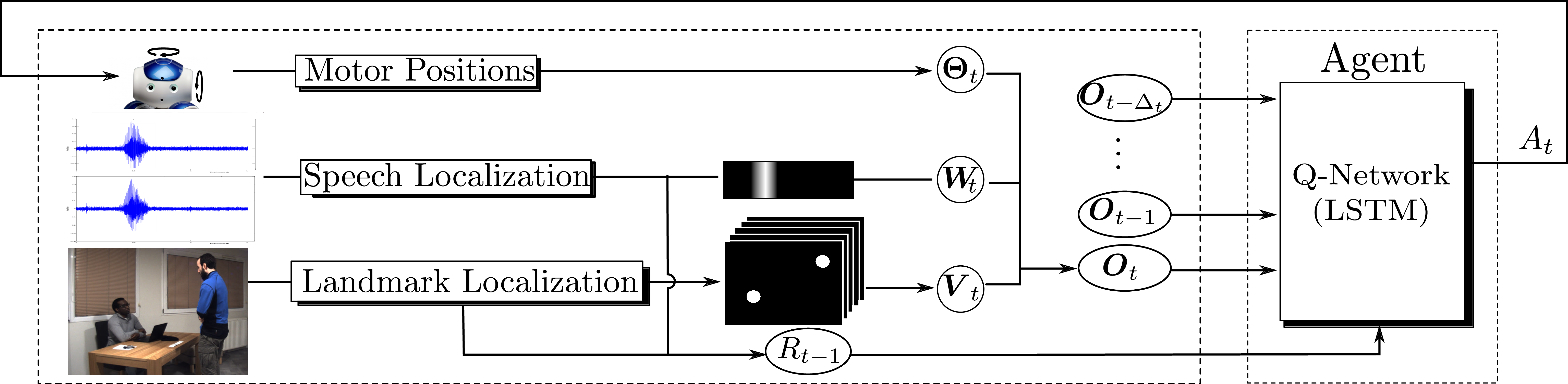
Past, present and future HRI developments require datasets for training, validation, test as well as for benchmarking. HRI datasets are challenging because it is not easy to record realistic interactions between a robot and users. RL avoids systematic recourse to annotated datasets for training. In [45], [37] we proposed the use of a simulated environment for pre-training the RL parameters, thus avoiding spending hours of tedious interaction.
Websites:
https://team.inria.fr/perception/research/deep-rl-for-gaze-control/,