

Section: New Results
Deep Reinforcement Learning for Audio-Visual Robot Control
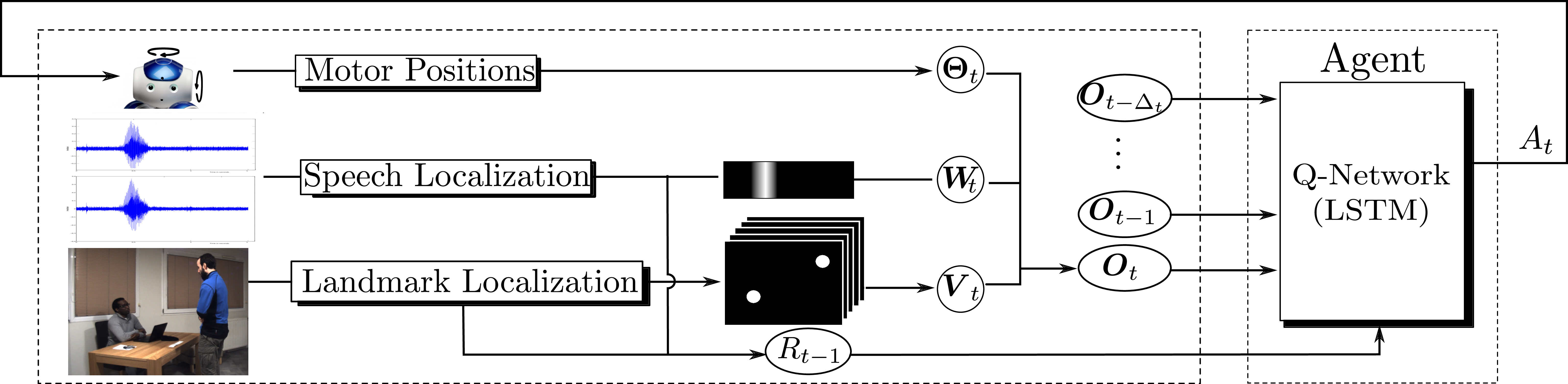
More recently, we investigated the use of reinforcement learning (RL) as an alternative to sensor-based robot control. The robotic task consists of turning the robot head (gaze control) towards speaking people. The method is more general in spirit than visual (or audio) servoing because it can handle an arbitrary number of speaking or non speaking persons and it can improve its behavior online, as the robot experiences new situations. An overview of the proposed method is shown in Fig. 4. The reinforcement learning formulation enables a robot to learn where to look for people and to favor speaking people via a trial-and-error strategy.
|
Past, present and future HRI developments require datasets for training, validation, test as well as for benchmarking. HRI datasets are challenging because it is not easy to record realistic interactions between a robot and users. RL avoids systematic recourse to annotated datasets for training. In [39] we proposed the use of a simulated environment for pre-training the RL parameters, thus avoiding spending hours of tedious interaction.
Website: https://team.inria.fr/perception/research/deep-rl-for-gaze-control/.