
Keywords
Computer Science and Digital Science
- A2.3. Embedded and cyber-physical systems
- A5.1. Human-Computer Interaction
- A5.6. Virtual reality, augmented reality
- A5.10. Robotics
- A5.11. Smart spaces
- A6.1. Methods in mathematical modeling
- A6.2. Scientific computing, Numerical Analysis & Optimization
- A6.4. Automatic control
- A8.4. Computer Algebra
- A8.11. Game Theory
- A9.5. Robotics
Other Research Topics and Application Domains
- B2.1. Well being
- B2.5. Handicap and personal assistances
- B2.7. Medical devices
- B2.8. Sports, performance, motor skills
- B3.1. Sustainable development
- B3.5. Agronomy
- B5.2. Design and manufacturing
- B5.6. Robotic systems
- B5.7. 3D printing
- B8.1. Smart building/home
- B8.4. Security and personal assistance
- B9.1. Education
- B9.2. Art
- B9.9. Ethics
1 Team members, visitors, external collaborators
Research Scientists
- Jean-Pierre Merlet [Team leader, Inria, Senior Researcher, HDR]
- Yves Papegay [Inria, Researcher, HDR]
- Odile Pourtallier [Inria, Researcher]
- Eric Wajnberg [INRA, Senior Researcher, HDR]
PhD Student
- Jaafar Moussaid [Inria]
Technical Staff
- Sylvain Guenon [Univ Côte d'Azur, Engineer]
Administrative Assistant
- Laurie Vermeersch [Inria, until Nov 2020]
External Collaborators
- Eric Sejor [Centre hospitalier universitaire de Nice]
- Ting Wang [ESIEE]
2 Overall objectives
HEPHAISTOS has been created as a team on January 1st, 2013 and as a project team in 2015.
The goal of the project is to set up a generic methodology for the design and evaluation of an adaptable and interactive assistive ecosystem for the elderly and the vulnerable persons that provides furthermore assistance to the helpers, on-demand medical data and may manage emergency situations. More precisely our goals are to develop devices with the following properties:
- they can be adapted to the end-user and to its everyday environment
- they should be affordable and minimally intrusive
- they may be controlled through a large variety of simple interfaces
- they may eventually be used to monitor the health status of the end-user in order to detect emerging pathology
Assistance will be provided through a network of communicating devices that may be either specifically designed for this task or be just adaptation/instrumentation of daily life objects.
The targeted population is limited to frail people 1 and the assistive devices will have to support the individual autonomy (at home and outdoor) by providing complementary resources in relation with the existing capacities of the person. Personalization and adaptability are key factor of success and acceptance. Our long term goal will be to provide robotized devices for assistance, including smart objects, that may help disabled, elderly and handicapped people in their personal life.
Assistance is a very large field and a single project-team cannot address all the related issues. Hence HEPHAISTOS will focus on the following main societal challenges:
- mobility: previous interviews and observations in the HEPHAISTOS team have shown that this was a major concern for all the players in the ecosystem. Mobility is a key factor to improve personal autonomy and reinforce privacy, perceived autonomy and self-esteem.
- managing emergency situations: emergency situations (e.g. fall) may have dramatic consequences for elderly. Assistive devices should ideally be able to prevent such situation and at least should detect them with the purposes of sending an alarm and to minimize the effects on the health of the elderly.
- medical monitoring: elderly may have a fast changing trajectory of life and the medical community is lacking timely synthetic information on this evolution, while available technologies enable to get raw information in a non intrusive and low cost manner. We intend to provide synthetic health indicators, that take measurement uncertainties into account, obtained through a network of assistive devices. However respect of the privacy of life, protection of the elderly and ethical considerations 5 impose to ensure the confidentiality of the data and a strict control of such a service by the medical community.
- rehabilitation and biomechanics: our goals in rehabilitation are 1) to provide more objective and robust indicators, that take measurement uncertainties into account to assess the progress of a rehabilitation process 2) to provide processes and devices (including the use of virtual reality) that facilitate a rehabilitation process and are more flexible and easier to use both for users and doctors. Biomechanics is an essential tool to evaluate the pertinence of these indicators, to gain access to physiological parameters that are difficult to measure directly and to prepare efficiently real-life experiments.
Addressing these societal focus induces the following scientific objectives:
-
design and control of a network of connected assistive
devices: existing
assistance devices suffer from a lack of essential functions
(communication, monitoring, localization,...) and their acceptance and
efficiency may largely be improved. Furthermore essential functions
(such as fall detection, knowledge sharing, learning, adaptation to
the user and helpers) are missing. We intend to develop new
devices, either by adapting existing systems or developing brand-new
one to cover these gaps. Their performances, robustness and
adaptability will be obtained through an original design
process, called appropriate design, that takes uncertainties
into account to determine almost all the nominal values of the
design parameters that guarantee to obtain the required
performances.
The development of these devices covers our robotics works
(therefore including robot analysis, kinematics, control, ...)
but is not limited to them. These devices will be present in the three
elements of the ecosystem (user, technological helps and
environment) and will be integrated in a common network.
The study of this robotic network and of its element is
therefore a major focus point of the HEPHAISTOS
project. In this field our
objectives are:
- to develop methods for the analysis of existing robots, taking into account uncertainties in their modeling that are inherent to such mechatronic devices
- to propose innovative robotic systems
- evaluation, modeling and programming of assistive ecosystem: design of such an ecosystem is an iterative process which relies on different types of evaluation. A large difference with other robotized environments is that effectiveness is not only based on technological performances but also on subjectively perceived dimensions such as acceptance or improvement of self-esteem. We will develop methodologies that cover both evaluation dimensions. Technological performances are still important and modeling (especially with symbolic computation) of the ecosystem will play a major role for the design process, the safety and the efficiency, which will be improved by a programming/communication framework than encompass all the assistance devices. Evaluation will be realized with the help of clinical partners in real-life or by using our experimental platforms.
- uncertainty management: uncertainties are especially present in all of our activities (sensor, control, physiological parameters, user behavior, ...). We intend to systematically take them into account especially using interval analysis, statistics, game theory or a mix of these tools.
- economy of assistance: interviews by the HEPHAISTOS team and market analysis have shown that cost is a major issue for the elderly and their family. At the opposite of other industrial sectors manufacturing costs play a very minor role when fixing the price of assistance devices: indeed prices result more from the relations between the players and from regulations. We intend to model these relations in order to analyze the influence of regulations on the final cost.
The societal challenges and the scientific objectives will be supported by experimentation and simulation using our development platforms or external resources.
In terms of methodologies the project will focus on the use and mathematical developments of symbolic tools (for modeling, design, interval analysis), on interval analysis (for design, uncertainties management, evaluation), on game theory (for control, localization, economy of assistance) and on control theory. Implementation of the algorithms will be performed within the framework of general purpose software such as Scilab, Maple, Mathematica and the interval analysis part will be based on the existing library ALIAS, that is still being developed mostly for internal use.
Experimental work and the development of our own prototypes are strategic for the project as they allow us to validate our theoretical work and to discover new problems that will feed in the long term the theoretical analysis developed by the team members.
Dissemination is also an essential goal of our activity as its background both on the assistance side and on the theoretical activities as our approaches are not sufficiently known in the medical, engineering and academic communities.
In summary HEPHAISTOS has as major research axes assistance robotics,
modeling (see section 8.1.2), game theory, interval analysis and
robotics (see section 7.1). The coherence of these axis is
that interval analysis
is a major tool to manage the uncertainties that are inherent to a
robotized device, while assistance robotics provides realistic problems which
allow us to develop, test and improve our algorithms. Our overall
objectives are presented in
http://
3 Research program
3.1 Interval analysis
We are interested in real-valued system solving (, ), in optimization problems, and in the proof of the existence of properties (for example, it exists such that or it exist two values , such that and ). There are few restrictions on the function as we are able to manage explicit functions using classical mathematical operators (e.g. as well as implicit functions (e.g. determining if there are parameter values of a parametrized matrix such that the determinant of the matrix is negative, without calculating the analytical form of the determinant).
Solutions are searched within a finite domain (called a box) which may be either continuous or mixed (i.e. for which some variables must belong to a continuous range while other variables may only have values within a discrete set). An important point is that we aim at finding all the solutions within the domain whenever the computer arithmetic will allow it: in other words we are looking for certified solutions. For example, for 0-dimensional system solving, we will provide a box that contains one, and only one, solution together with a numerical approximation of this solution. This solution may further be refined at will using multi-precision.
The core of our methods is the use of interval analysis that allows one to manipulate mathematical expressions whose unknowns have interval values. A basic component of interval analysis is the interval evaluation of an expression. Given an analytical expression in the unknowns and ranges for these unknowns we are able to compute a range , called the interval evaluation, such that
In other words the interval evaluation provides a lower bound of the minimum of and an upper bound of its maximum over the box.
For example if and , then , meaning that for any in [0.5,1.6] we guarantee that .
The interval evaluation of an expression has interesting properties:
- it can be implemented in such a way that the results are guaranteed with respect to round-off errors i.e. property 1 is still valid in spite of numerical errors induced by the use of floating point numbers
- if or , then no values of the unknowns in their respective ranges can cancel
- if (), then is positive (negative) for any value of the unknowns in their respective ranges
A major drawback of the interval evaluation is that may be overestimated i.e. values of such that may not exist. This overestimation occurs because in our calculation each occurrence of a variable is considered as an independent variable. Hence if a variable has multiple occurrences, then an overestimation may occur. Such phenomena can be observed in the previous example where while the real maximum of is approximately 0.9144. The value of is obtained because we are using in our calculation the formula with having the same interval value as .
Fortunately there are methods that allow one to reduce the overestimation and the overestimation amount decreases with the width of the ranges. The latter remark leads to the use of a branch-and-bound strategy in which for a given box a variable range will be bisected, thereby creating two new boxes that are stored in a list and processed later on. The algorithm is complete if all boxes in the list have been processed, or if during the process a box generates an answer to the problem at hand (e.g. if we want to prove that , then the algorithm stops as soon as for a certain box ).
A generic interval analysis algorithm involves the following steps on the current box 8, 3:
- exclusion operators: these operators determine that there is no solution to the problem within a given box. An important issue here is the extensive and smart use of the monotonicity of the functions
- filters: these operators may reduce the size of the box i.e. decrease the width of the allowed ranges for the variables
- existence operators: they allow one to determine the existence of a unique solution within a given box and are usually associated with a numerical scheme that allows for the computation of this solution in a safe way
- bisection: choose one of the variable and bisect its range for creating two new boxes
- storage: store the new boxes in the list
The scope of the HEPHAISTOS project is to address all these steps in order to find the most efficient procedures. Our efforts focus on mathematical developments (adapting classical theorems to interval analysis, proving interval analysis theorems), the use of symbolic computation and formal proofs (a symbolic pre-processing allows one to automatically adapt the solver to the structure of the problem), software implementation and experimental tests (for validation purposes).
Important note: We have insisted on interval analysis because this is a major component or our robotics activity. Our theoretical work in robotics is an analysis of the robotic environment in order to exhibit proofs on the behavior of the system that may be qualitative (e.g. the proof that a cable-driven parallel robot with more than 6 non-deformable cables will have at most 6 cables under tension simultaneously) or quantitative. In the quantitative case as we are dealing with realistic and not toy examples (including our own prototypes that are developed whenever no equivalent hardware is available or to very our assumptions) we have to manage problems that are so complex that analytical solutions are probably out of reach (e.g. the direct kinematics of parallel robots) and we have to resort to algorithms and numerical analysis. We are aware of different approaches in numerical analysis (e.g. some team members were previously involved in teams devoted to computational geometry and algebraic geometry) but interval analysis provides us another approach with high flexibility, the possibility of managing non algebraic problems (e.g. the kinematics of cable-driven parallel robots with sagging cables, that involves inverse hyperbolic functions) and to address various types of issues (system solving, optimization, proof of existence ...). However whenever needed we will rely as well on continuation, algebraic geometry, geometry or learning.
3.2 Robotics
HEPHAISTOS, as a follow-up of COPRIN, has a long-standing tradition of robotics studies, especially for closed-loop robots 4, especially cable-driven parallel robots. We address theoretical issues with the purpose of obtaining analytical and theoretical solutions, but in many cases only numerical solutions can be obtained due to the complexity of the problem. This approach has motivated the use of interval analysis for two reasons:
- the versatility of interval analysis allows us to address issues (e.g. singularity analysis) that cannot be tackled by any other method due to the size of the problem
- uncertainties (which are inherent to a robotic device) have to be taken into account so that the real robot is guaranteed to have the same properties as the theoretical one, even in the worst case. This is a crucial issue for many applications in robotics (e.g. medical or assistance robot)
Our field of study in robotics focuses on kinematic issues such as workspace and singularity analysis, positioning accuracy, trajectory planning, reliability, calibration, modularity management and, prominently, appropriate design, i.e. determining the dimensioning of a robot mechanical architecture that guarantees that the real robot satisfies a given set of requirements. The methods that we develop can be used for other robotic problems, see for example the management of uncertainties in aircraft design 6.
Our theoretical work must be validated through experiments that are
essential for the sake of credibility. A contrario, experiments will
feed theoretical work. Hence HEPHAISTOS works with partners on the
development of real robots but also develops its own prototypes. In
the last years we have developed a large number of prototypes and
we have extended our development to
devices that are not strictly robots but are part of an overall
environment for assistance.
We benefit here from the development of new
miniature, low energy computers with an interface for analog and
logical sensors such as the Arduino or the Phidgets.
The web pages
http://
4 Application domains
While the methods developed in the project can be used for a very broad set of application domains (for example we have an activity in CO2 emission allowances, it is clear that the size of the project does not allow us to address all of them. Hence we have decided to focus our applicative activities on mechanism theory, where we focus on modeling, optimal design and analysis of mechanisms. Along the same line our focus is robotics and especially service robotics which includes rescue robotics, rehabilitation and assistive robots for elderly and handicapped people. Although these topics were new for us when initiating the project we have spent two years determining priorities and guidelines by conducting about 200 interviews with field experts (end-users, praticians, family and caregivers, institutes), establishing strong collaboration with them (e.g. with the CHU of Nice-Cimiez) and putting together an appropriate experimental setup for testing our solutions.
It must be reminded that we are able to manage a large variety of problems in totally different domains only because interval analysis, game theory and symbolic tools provides us the methodological tools that allow us to address completely a given problem from the formulation and analysis up to the very final step of providing numerical solutions. Hence although we mainly focus on medical and assistance robotics we address also a large number of applications: agriculture, biology, arts, system design to name a few.
5 Highlights of the year
Our work process typically alternates between various phases:
- 1-theoretical works on the design and analysis of our assistance/medical monitoring systems
- 2- development/improvement of prototypes,
- 3-experimental validation
- 4- analysis of the experiment results.
As may be seen experimental validation is a key element of the process and in our field requires a huge effort in term of manpower (researchers, praticians, subjects) and for fulfilling our legal obligations regarding experiments involving human beings. We have planned several experiments for 2020:
- 1- related to our rehabilitation station, walking experiments with our cable-driven parallel robot (CDPR), walking experiment with an instrumented cane
- 2- an important demonstration of one CDPR used for an artistic exhibition during the largest robotics conference ICRA that should have been held in Paris
At the same we have several experiments going on regarding monitoring human activities in one retirement house (EHPAD) and in a day care hospital (ICP). Unfortunately the Covid pandemy has prohibited us to follow this planning: all experiments in 1- have been cancelled, the ICRA conference has been held virtually and we have no more access to the the EHPAD and ICP. Hence most of the preparatory work for realizing these experiments has been wasted and re-planning them will require a large amount of work.
Still during the 5 first months of 2020 we have designed the CDPR that should have been used for ICRA and have tested it in our laboratory. These experiments has allowed us to validate several improvements of this robot
- a new model for the robot that takes into account its pulleys and cable sagging
- a method for improving the estimation of the pose of the robot by fusing lidars data, measurements of the cable angle at a specific point with an accelerometer and measurements of the cable lengths
- a control scheme to manage slack cables. As seen in section 7.1.1 having slack cable(s) cannot be avoided which leads to disturbances in the platform pose during transition steps where a slack cable becomes under tension. The scheme has shown to drastically decrease the disturbance.
Covid has had also a large impact on the development of our automated suturing robot (see section 7.2) as the engineer in charge of this development was unable to work on it. Still the system was small enough to be moved at home so that we have partly completed this project and have shown good preliminary results. But clearly Covid has delayed this project by at least 6 months.
As most of our robotics experimental work have been postponed we have somewhat focused our research on more theoretical works related to biology (see section 7.3) where our mathematical arsenal was useful.
6 New software and platforms
6.1 New software
6.1.1 ALIAS
- Name: Algorithms Library of Interval Analysis for Systems
- Keyword: Interval analysis
-
Functional Description:
The ALIAS library whose development started in 1998, is a collection of procedures based on interval analysis for systems solving and optimization.
ALIAS is made of two parts:
ALIAS-C++ : the C++ library (87 000 code lines) which is the core of the algorithms
ALIAS-Maple : the Maple interface for ALIAS-C++ (55 000 code lines). This interface allows one to specify a solving problem within Maple and get the results within the same Maple session. The role of this interface is not only to generate the C++ code automatically, but also to perform an analysis of the problem in order to improve the efficiency of the solver. Furthermore, a distributed implementation of the algorithms is available directly within the interface.
-
URL:
http://
www-sop. inria. fr/ hephaistos/ developpements/ main. html - Contact: Jean-Pierre Merlet
- Participants: Jean-Pierre Merlet, Odile Pourtallier
6.2 New platforms
6.2.1 ALIAS, Algorithms Library of Interval Analysis for Systems
Participants: Jean-Pierre Merlet, Yves Papegay.
URL: http://
The ALIAS library whose development started in 1998, is a collection of procedures based on interval analysis for systems solving and optimization. As mentioned in the previous section it is one of the main software development of the team and is updated frequently with the addition of specific modules, most of which are developped when dealing with specific problems that have been treated during the year.
This year we have for example used ALIAS to provide certified solutions of the kinematicsof a cable-driven parallel robots, a very complex problem, 2. We have confirmed the solutions that has been provided by a computer intensive iterative methods and have shown that the interval analysis method was able to manage a more complex case for which the iterative method cannot be reasonably used.
6.2.2 Hardware platforms
We describe here only the new platforms that have been developed or improved in 2019 while we maintain a very large number of platforms (e.g. the cable-driven parallel robots of the MARIONET family, the ANG family of walking aids,r our experimental flat and the activities detection platform implemented in the day hospital Institut Claude Pompidou and EHPAD Valrose, Nice ).
Vitrifications robot
. We have used the modularity of our MARIONET-CRANE prototype to design a new model for the art exhibition "Vitrifications". This prototype was an improved version of the robot used for this exhibition in 2019. Several sensors were added: lidars for pose estimation, accelerometers for measuring the cable angles allowing use to design more efficient control laws, see section 7.1.1. This prototype was intented to be displayed during the robotics conference ICRA that should have been held in Paris. It was tested in our laboratory with impressive results but unfortunatly ICRA has been finally held virtually because of the Covid. Still this platform is ready to be used for amedical purpose, namely walking assistance or medical monitoring.
REVMED: virtual reality and rehabilitation
INRIA and Université Côte d'Azur have agreed to fund us for developing the platform REVMED whose purpose is to introduce end-user motion and their analysis in a virtual reality environment in order to make rehabilitation exercises more attractive and more appropriate for the rehabilitation process. The main idea is to have a modular rehabilitation station allowing to manage various exercise devices with a very low set-up time (typically 10 mn), that will be actuated in order to allow ergotherapists to favor the work of various muscles groups and the difficulty of the exercise, while monitoring the rehabilitation process with various external sensors, providing an objectification of the evaluation. Version 2 has been completed in 2019 and we were planning to proceed in 2020 to the first trials. Unfortunatly the Covid crisis has led to postpone these experiments.
Suturing robot RSUR
We have also used our parallel robot "left hand" to develop an automated suturing robot, see section 7.2.
7 New results
7.1 Robotics
7.1.1 Analysis of Cable-driven parallel robots
Participants: Jean-Pierre Merlet, Yves Papegay.
We have continued the analysis of suspended CDPRs for control and design purposes. This analysis is heavily dependent on the behavior of the cable. Three main models can be used: ideal (no deformation of the cable due to the tension, the cable shape is a straight line between the attachments points), elastic (cable length changes according to the tension to which it is submitted, straight line cable shape) and sagging (cable shape is not a line as the cable is submitted to its own mass). The different models leads to very different analysis with a complexity increasing from ideal to sagging. All cables exhibit sagging but the sagging effect is often neglected if the CDPR is relatively small while it definitively cannot be neglected for large CDPRs. The most used sagging model is the Irvine model 18. This is a non algebraic planar model with the upper attachment point of the cable is supposed to be grounded: it provides the coordinates of the lowest attachment point of the cable if the cable length at rest and the force applied at this point are known. It takes into account both the elasticity and deformation of the cable due to its own mass. A drawback of this model is that we will be more interested in a closed-form of the for a given pose of (for the inverse kinematics of CDPR) and in alternate form of the model that will provide constraint on the force components (for the direct kinematics). These equations appears in the kinematic equations for example in the inverse and direct kinematics (i.e finding all possible solutions for both problems) that are required for CDPRs control. This year the direct kinematics has been solved for the 4-1 CDPR (4 cables attached at the same point, leading to a 3dof robot)3.
7.1.2 Cable-Driven Parallel Robots for large scale additive manufacturing
Participants: Jean-Pierre Merlet, Yves Papegay.
Easy to deploy and to reconfigure, dynamically efficient in large workspaces even with payloads, cable-driven parallel robots are very attractive for solving displacement and positioning problems in architectural building at large scale seems to be a good alternative to crane and industrial manipulators in the area of additive manufacturing.
We have been contacted in 2018 by the artist
Anne-Valérie Gasc that is interested in mimicking the 3D additive
manufacturing process on large scale for a live art performance.
She was interested in a mean for widespreading glass micro-beads on a
given trajectory over a 21 9m large platform located at the
contemporary art center
Les Tanneries, located close to
Montargis. She was especially
interested in using a CDPR for that purpose
because of the low visual intrusivity of the cables and its ability to
move large load. After a few month of discussions we agree to recycle
our old MARIONET-CRANE prototype (2009) for this exhibition although
the place was not the most appropriate for the CDPR as the height of
the location was only 3 meters.The system was
fully operational a few days after the official opening of the exhibition
and was at the heart of the artistic exhibition "Les Larmes du Prince -
Vitrifications"
(http://
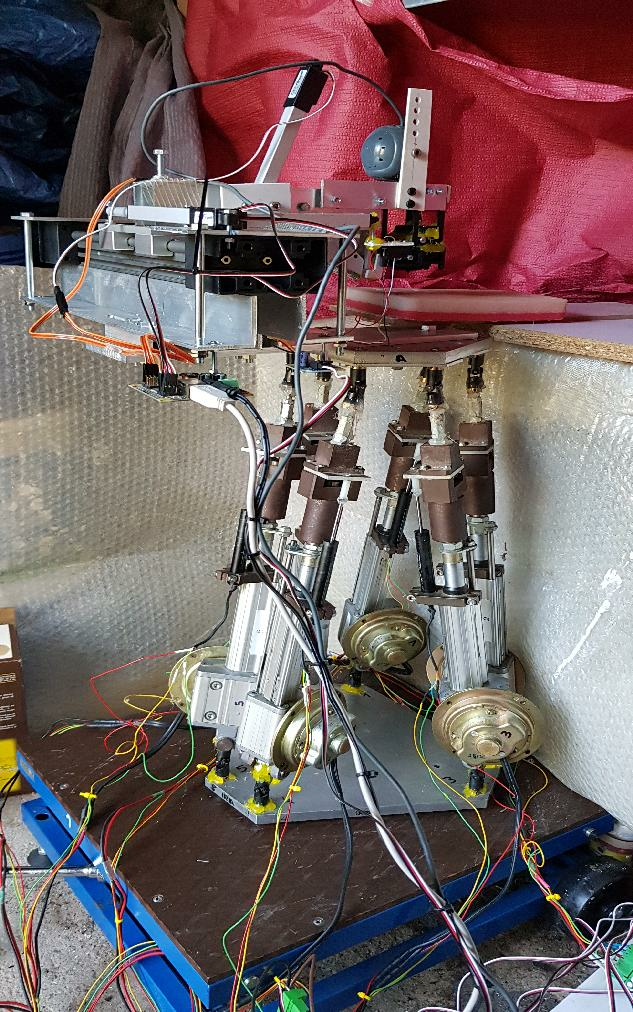
After this first successful operation we were planning to exhibit this robot as a demonstration during the largest robotics conference ICRA which was planned to be held at Paris in May 2020. The exhibition place was slightly different but our robot is designed to be modular in order to adapt his performance to the available size and requested performance. We have also analyzed from the large amount of data that has been retrieved during the 2019 experiments to improve our CDPR. A persistent problem for CDPR is improve the positioning accuracy. The pose of the moving platform is usually obtained from the estimation of the cable lengths that are fed to a direct kinematics solve that compute the pose. The cable lengths estimation are obtained from the measurement of the winch drums rotation but for large CDPR we have several layers on the drum and the coiling process is erratic. Consequently over time the lengths estimation may derive with time leading to an increasing inaccuracy. For the 2019 experiment we were measuring the altitude of the platform with a lidar so that we were fusing the length measurements with a partial observation of the pose that has led to an acceptable positioning accuracy. However we were willing to go on to improve this accuracy and we have thus first added 2 more horizontal lidars and have placed around the CDPR three vertical walls whose position in the reference frame has been calibrated with a theodolite. An algorithm has been developed that first detect the measured lidar points lying on these walls and then fit vertical planes on that points. This fit allow to determine the location of the center of the lidars in the reference frame from which we deduce the location of the moving platform. This method enables to locate the moving platform with an accuracy of less than 2mm in the horizontal direction and 0.5 mm in the vertical direction at a frequency of about 5Hz, this approach being original in the CDPR community. Provided that we know which cables are under tension (we have 4 cables but it has been proven that almost every case there will be at most 3 cables under tension while the other cables are slack) this pose estimation allows to determine what are the cable lengths. Hence we may update the estimation provided by the drum rotation and in between two lidars pose estimation we will gen an accurate pose estimation from the cable lengths at a frequency of about 100 Hz.
Hence there is necessity to determine which CDPR cables are slack. It may be thought that force sensor may be used but it has been shown that measuring cable tensions is extremely difficult to put in place and provide only very approximate measurements. Therefore we have decided to use another approach based on the measurement of the angle between the cable and the vertical at a specific point on the cable. This angle is measured by a small accelerometer that is fixed on the cable. Using the pose estimation and this angle we are able to use the Irvine equation to determine not only the tension in the cable but also its length and therefore to obtain an accurate estimation of all the cable lengths. A further interest is that when following trajectories there will be various set of cables under tension. As cable slackness is unavoidable it is of interest to have the length of slack cable always close to their length when under tension so that to avoid disturbances during a transition between various under-tension cables configuration. We have designed a control strategy based on the angle measurements for that purpose.
Our prototype, figure 1, in its ICRA configuration has been tested at INRIA and was ready to be shipped to Paris. Unfortunately ICRA has been canceled because of the Covid.

CDPR prototype developed for the ICRA conference
7.2 Medical activities
Participants: Jean-Pierre Merlet, Sylvain Guénon.
Eric Sejor, a surgeon at Nice hospital, has contacted us about developing a robotized system for realizing sutures in an autonomous way. Suturing is a lengthy process while in many cases this is not a complex operation. Eric Sejor mentions that developing an autonomous system allowing to manage standard wounds may be extremely interesting, especially for emergency service that are under-staffed. Instead of developing a new robot dedicated to this purpose we have proposed to Eric Sejor to build a system based on the existing manual tools that require to put the instrument in place and then simply squeezing a trigger. The placement will be realized by one of our small parallel robot, with the help of vision system to locate the edge of the wound, while the trigger squeezing will be performed by an actuator. We have obtained in 2019 an Idex funding (one year for an engineer) to develop a proof-of-concept prototype that will perform the operation on silicone mockups that are used for the surgeon training. The Covid has considerably strained the hardware development for this robot but we have been able to develop the prototype (figure 2)
A suturing robot
This robot uses as suturing tool a medical stapler that has been actuated and an actuated head with a camera and a distance sensor. Using the feed from the camera the surgeon designates the starting point of the wound (figure 3).
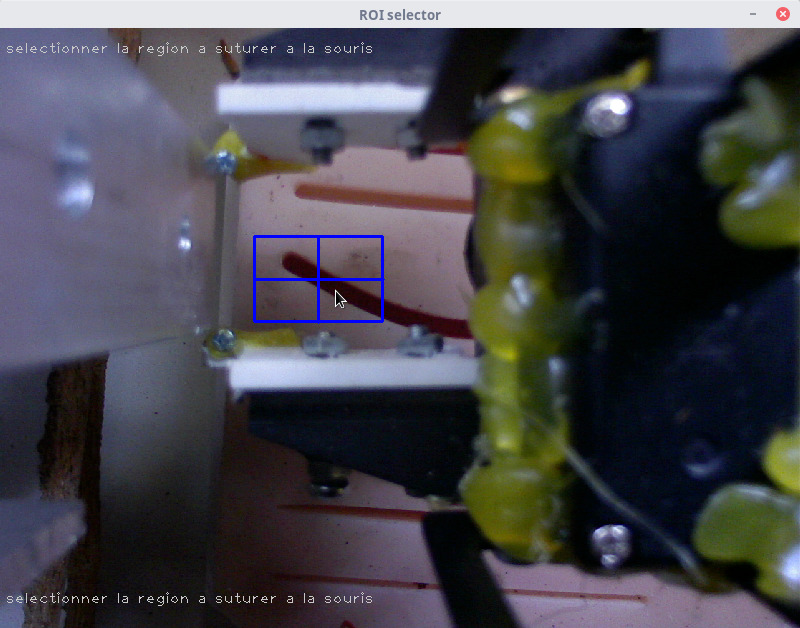
The surgeon designates the starting point of the wound (the blue rectangle)
The distance sensor is used to build a 3D model of the wound that allow to determine the location of the first suturing point and the orientation of the wound at this point. The parallel robot then moves the stapler at the right place, a robotic gripper close the wound and the stapler is actuated to put the first staple in place (figure 4).
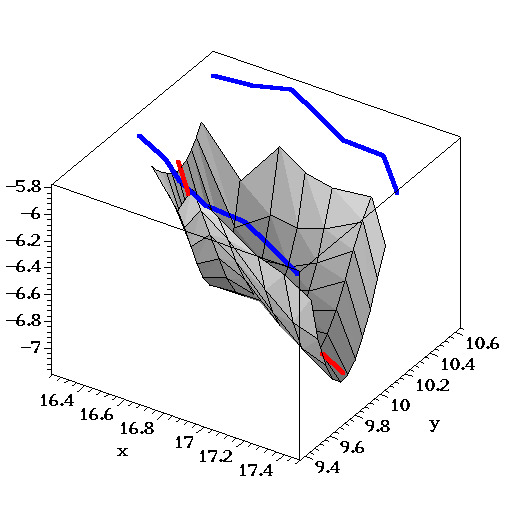

A 3D model of the wound is obtained by using the measurements of the distance sensor (in blue the edges of the wound), Using the 3D model the robot moves the stapler at the first suturing point with the right orientation and the stapler is actuated to put the fist staple in places
7.3 Biology activities
Participants: Eric Wajnberg, Yves Papegay, Odile Pourtallier.
7.3.1 Behavior of the potter wasp insect
In 2020, through an international scientific cooperation with Israeli scientists located at the Ben-Gurion University of the Negev, we developed a probabilistic model whose aim is to understand a strange – and up to now not understandable – reproductive behavior of the potter wasp insect Delta dimidiatipenne (Hymenoptera). Females of this insect lay their eggs in mud chambers provisioned with caterpillars they capture to feed their young. Preliminary observations indicate that many of the caterpillars collected by this wasp are actually parasitized by a small gregarious parasitoid wasp and are providing a lower amount of food for the wasp progeny. As a result, all players in the interaction perish – the young potter wasp cannot fully exploit the caterpillars and presumably starve to death; and the small parasitoids complete their development, but cannot break out of the mud and remain trapped in the sealed pot. We developed a probabilistic model trying to find under what environmental conditions such a striking phenomenon (i.e., bringing back to the nest parasitized caterpillars), can be maintained, despite the high cost to all players. The graph 5 gives an example of the results obtained, showing the overall number of progeny produced as a function of the proportion of parasitized caterpillar in the environment pParasitized and the probability of the foraging female to be able to recognize correctly a healthy from a parasitized caterpillar pDiscrimination.
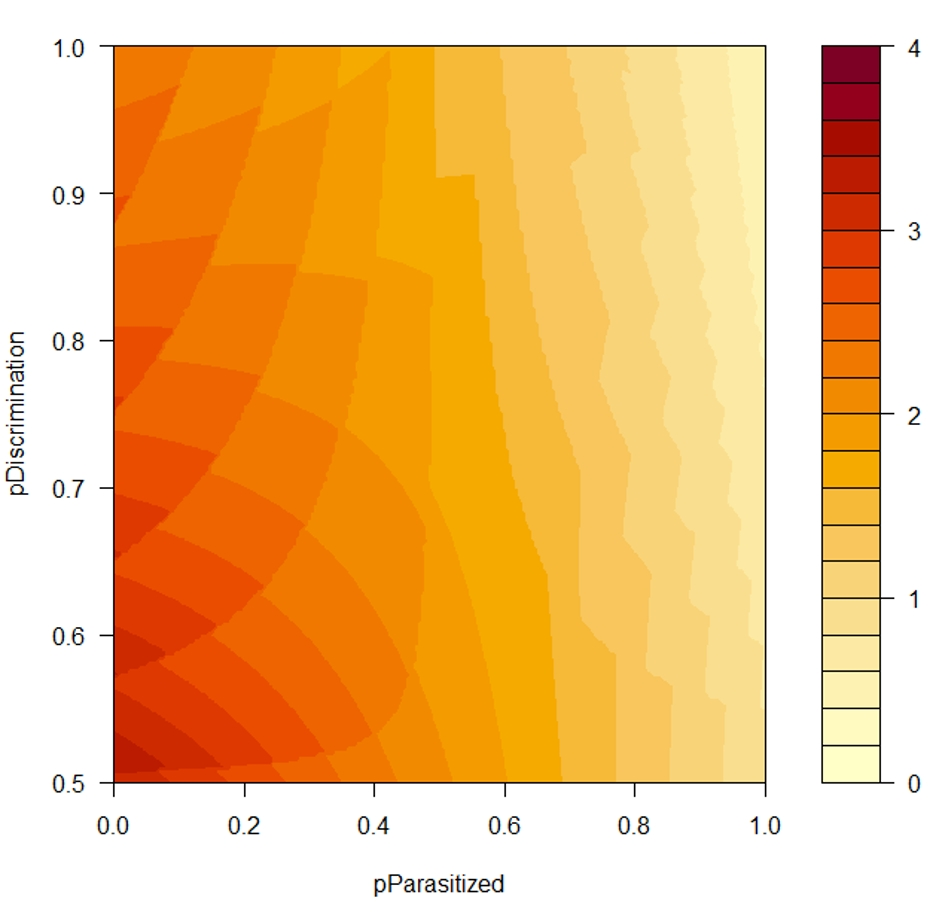
Overall number of progeny
The number of overall progeny produced is almost always different from zero, i.e., wasp females are always able to produce progeny, so bringing back parasitized caterpillars to the nest can be a surviving strategy. The results will be included in a publication that will be submitted to an international scientific journal.
7.3.2 Optimized flower visiting strategy of bees
In 2020, through an international scientific cooperation with Israeli scientists located at the University of Haifa, we developed an optimization deterministic model trying to understand what should be the optimized flower visiting strategy of bees foraging for nectar. Bees are actually visiting either simple or complex flowers. The reward acquired on simple flowers is easy to obtain and do not need a learning ability. On complex flowers, however, bees need to learn how to forage on them to get a reward. Once the learning period has been done, however, the reward acquired on complex flowers is higher than on simple flowers. One question is how the beehive can sustain the time needed for the bees to learn how to forage on complex flowers. Are there bees keeping on foraging on simple flowers to get back sufficient food to the hive for the entire colony, and to enable others to take the needed time to learn? The model we developed keeps tract of bee foraging behavior starting their learning process on complex flower at different time following at optimized time schedule. The need for a fixed proportion of bees – that are “household workers” and/or larvae – to remain in the hive to maintain its activity, was also taken into account. Optimized results were obtained under different situations, based on specific computational algorithms that we had to implement. As an example, the graph 6 gives the optimized number of bees progressively going to complex flowers in the course of time, for an increasing proportion of bees remaining in the hive (all other parameters fixed to their default values, e.g., in this case there are 100 bees in the hive). The results we obtained are providing a couple of predictions that are now being tested on real animals in the University of Haifa in Israel. Also, these results will soon be included in a publication under preparation to be inserted in a Special Issue that will be published in the Philosophical Transactions of the Royal Society B.
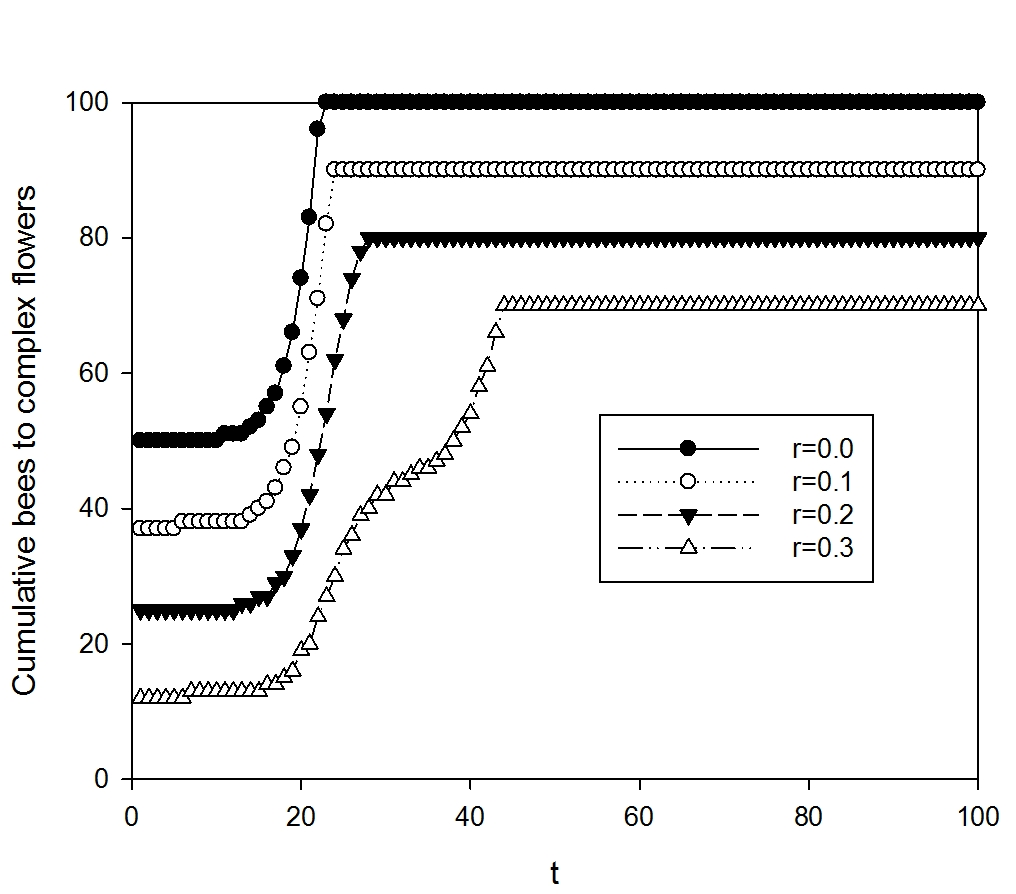
Optimized number of bees progressively going to complex flowers in the course of time, for an increasing proportion of bees remaining in the hive
8 Bilateral contracts and grants with industry
8.1 Bilateral contracts with industry
8.1.1 Pedagogical cable-driven parallel robot
Participants: Jean-Pierre Merlet.
We are in the process of signing a contract with the company GenerationRobot for developing a self-contained pedagogical kit allowing to build a two degrees-of-freedom cable-driven parallel robot. This kit will allow students from the college to university level to build the CDPR.We have started to write a pedagogical manual describing various experiments allowing to physically illustrate scientific concepts in various fields (mathematics, computer network, mechanics, robotics, ...). This kit will tested by teachers and then commercialized by GenerationRobot probably at the end of 2021.
8.1.2 Symbolic tools for modeling and simulation
Participants: Yves Papegay.
This activity is the main part of a long-term ongoing collaboration with Airbus whose goal is to directly translate the conceptual work of aeronautics engineers into digital simulators to accelerate aircraft design.
An extensive modeling and simulation platform - MOSELA - has been designed which includes a dedicated modeling language for the description of aircraft dynamics models in term of formulae and algorithms, and a symbolic compiler producing as target an efficient numerical simulation code ready to be plugged into a flight simulator, as well as a formatted documentation compliant with industrial requirements of corporate memory.
Technology demonstrated by our prototype has been transferred : final version of our modeling and simulation environment has been delivered to Airbus in November 2012 and developer level know-how has been transferred in 2013 to a software company in charge of its industrialization and maintenance.
Since 2014, we are working on several enhancements and extension of functionalities, namely to enhance the performances and the numerical quality of the generated C simulation code, ease the integration of our environment into the airbus toolbox, help improving the robustness of the environment and the documentation.
9 Partnerships and cooperations
9.1 International initiatives
Informal international partners
We have numerous international collaborations but we mention here only the one with activities that go beyond joint theoretical or experimental works:
- University of Bologna, Italy: 2 joint PhD student, publications
- University Innsbruck, Austria: joint conference organization
- Fraunhofer IPA, Stuttgar, Germany: joint conference organization
- Duisburg-Essen University, Germany: joint conference organization
- University of New-Brunswick, Canada: 1 joint PhD student 13
- University Laval, Québec, Canada: joint book
- University of Tokyo, Japan: joint conference organization
- Tianjin University, China: joint book
9.2 European initiatives
9.2.1 FP7 & H2020 Projects
A project called ROCABLE will be funded by the COVR project that received funding from the European Union's Horizon 2020 research and innovation programme. This project is intented to deal with the safety of cable-driven parallel robot with as partners LS2N, Hephaistos, IRT T Jules Verne and Eiffage-Clemessy.
9.3 National initiatives
10 Dissemination
10.1 Promoting Scientific Activities
10.1.1 Scientific Events: Organisation
- J-P. Merlet is a permanent member of the International Steering Committee of the IROS conference, of the CableCon conference and chairman of the scientific Committee of the Computational Kinematics workshop. He was also an advisor for the largest robotics conference ICRA 2020, that has finally being held virtually because of the Covid,
- Y. Papegay is a permanent member of the International Steering Committee of the International Mathematica Symposium conferences series. He is a member of the OpenMath Society, building an extensible standard for representing the semantics of mathematical objects.
10.1.2 Leadership within the scientific community
- J-P. Merlet is a member of the IFToMM (International Federation for the Promotion of Mechanism and Machine Science) Technical Committees on History and on Computational Kinematics. He is a member of the scientific committee of the CNRS GDR robotique and a chair of 3IA Côte d'Azur.
10.1.3 Scientific expertise
- J-P. Merlet was involved in project evaluations for several foreign funding agencies (Israel, Austria, ERC). He was also appointed as Nominator for the Japan's Prize.
- E. Wajnberg is involved in project evaluation for several foreign funding agencies (Belgium, Italy).
- E. Wajnberg was invited to be a committee number for recruiting an Institute Director by the CNR (Rome, Italy)
10.1.4 Research administration
- J-P. Merlet is a corresponding member of Inria ethical committee (COERLE) and member of the Research, Ethical Committees of UCA (CERNI). He is an elected member of Inria Scientific Committee
- Y. Papegay is a member of the CUMI (and its president since January 2021)(the committee managing the interaction between researchers and the computer support staff)
- O. Pourtallier was responsible of the Inria NICE committee until June 2020 (long term, she is now member of this committee. It is the committee for invited scientists and post-doctoral student selection.).
- O. Pourtallier was a board member of the Scientific and Pedagogical Council of DS4H graduate school of UCA until October 2020.
- O. Pourtallier is a substitute board member of SeaTech, an Engineering School of University of Toulon.
- O. Pourtallier was vice president of the local researcher recruitment jury.
10.2 Journal
10.2.1 Member of the editorial boards
- E. Wajnberg is Editor-in-Chief of the journal BioControl (published by Springer).
- E. Wajnberg is a board member of the journals Entomologia Experimentalis et Applicata (published by Wiley), Neotropical Entomology (published by Springer), Applied Entomology and Zoology (published by Springer), and Journal of Economical Entomology (Publish by Oxford University Press).
10.3 Teaching - Supervision - Juries
10.3.1 Teaching
- J-P. Merlet has taught 9 hours on parallel robots to Master ISC (M2) at University of Toulon.
- Y. Papegay has taught 6 hours on parallel robots to Master ISC (M2) at University of Toulon
- P. Pourtallier lectured 6 hours on game theory to Master OSE (M2), at École des Mines de Paris, Sophia Antipolis, France
- E. Wajnberg lectured One week course (about 30 h) about the use of the R program and statistics for PhD students and senior scientists in Rehovot (Israel, February)
10.3.2 Supervision
- W. Plouvier. Improving pest control efficiency: a modelling approach (2015-2020). Supervisor: E. Wajnberg.
- E. Thomine. Agencement cultural pour promouvoir le transfert des services écosystémiques de biocontrôle au sein des paysages agricoles (2016 to 2020). Supervisors : N. Desneux & E. Wajnberg.
10.3.3 Juries
- J-P. Merlet has been president of 2 PhD juries and jury members of 5 PhD theses.
10.4 Popularization
- J-P. Merlet gives 3 talks in the Alpes-Maritimes in the framework of the Science pour Tous association. He has also participated in a seminar on robotics and media involving 6 robotics experts and 6 journalists for a reflexion on the bias of the presentation of robotics to a general audience. He was also a member of the scientific committee for the permanent exhibition Robot at the Cité des Sciences, Paris. He is also working with the GenerationRobot company for developing a pedagogical kit allowing students from college to University to build a 2 dof cable-driven parallel robot, while teachers will benefit from a pedagogical manual to illustrate scientific concepts (see section 8.1.1).
- Y. Papegay is actively participating to the Math.en.Jeans initiative for Mathematics teaching for undergraduate students.
- Y. Papegay is developing several pedagogical resources based on small robotics devices at high-school level.
- O. Pourtallier is corresponding researcher for two MATh.en.JEANS workshops, an initiative for Mathematics teaching for undergraduate students.
- E. Wajnberg gives 5 talks in the Alpes-Maritimes in the framework of the Science pour Tous association
10.4.1 Interventions
- the HEPHAISTOS project has on average about 100 visitors per year, either young students or teachers, to which we present our robotics and assistance activities
10.4.2 Internal action
- the HEPHAISTOS project has developed a set of cable-driven parallel robots, the MARIONET-SCHOOL series, that is used to illustrate visually scientific concepts in various domains
11 Scientific production
11.1 Major publications
- 1 articleInterval method for calibration of parallel robots: a vision-based experimentationMechanism and Machine Theory418August 2006, 929-944
- 2 articleChoosing measurement poses for robot calibration with the local convergence method and Tabu searchInt. J. of Robotics Research246June 2005, 501-518
- 3 articleInterval Analysis and Reliability in RoboticsInternational Journal of Reliability and Safety32009, 104-130URL: http://hal.archives-ouvertes.fr/inria-00001152/en/
- 4 book Parallel robots, 2nd Edition Springer 2005
- 5 article Les avancées en robotique d'assistance à la personne sous le prisme du droit et de l'éthique Revue générale de droit médicale December 2017
- 6 phdthesisDe la modélisation littérale à la simulation certifiéeUniversité de Nice Sophia-AntipolisNice, FranceJune 2012, URL: http://tel.archives-ouvertes.fr/tel-00787230
- 7 inproceedings From Modeling to Simulation with Symbolic Computation: An Application to Design and Performance Analysis of Complex Optical Devices Proceedings of the Second Workshop on Computer Algebra in Scientific Computing Munich Springer Verlag June 1999
- 8 inproceedingsA Polynomial Time Local Propagation Algorithm for General Dataflow Constraint ProblemsProc. Constraint Programming CP'98, LNCS 1520 (Springer Verlag)1998, 432--446
11.2 Publications of the year
International journals
Scientific book chapters
Reports & preprints
11.3 Cited publications
- 18 book Cable Structures MIT Press 1981