
Keywords
Computer Science and Digital Science
- A2.3.3. Real-time systems
- A3.1.1. Modeling, representation
- A5.5. Computer graphics
- A5.6. Virtual reality, augmented reality
- A5.10. Robotics
- A6.2.1. Numerical analysis of PDE and ODE
- A6.2.6. Optimization
- A6.4.3. Observability and Controlability
- A6.4.4. Stability and Stabilization
- A9.2. Machine learning
- A9.5. Robotics
Other Research Topics and Application Domains
- B2.5.1. Sensorimotor disabilities
- B2.5.3. Assistance for elderly
- B2.7. Medical devices
- B5.1. Factory of the future
- B5.5. Materials
- B5.6. Robotic systems
- B5.7. 3D printing
- B9.2. Art
1 Team members, visitors, external collaborators
Research Scientists
- Christian Duriez [Team leader, Inria, Senior Researcher, HDR]
- Olivier Goury [Inria, Researcher]
- Damien Marchal [CNRS, Researcher]
- Gang Zheng [Inria, Researcher, HDR]
Faculty Members
- Jeremie Dequidt [Université de Lille, Associate Professor]
- Alexandre Kruszewski [École centrale de Lille, Associate Professor, HDR]
Post-Doctoral Fellows
- Yinoussa Adagolodjo [Inria, From March 2019]
- Camille Krewcun [Inria, from Mar 2021]
PhD Students
- Walid Amehri [Inria]
- Paul Chaillou [Inria, from Oct 2021]
- Yiru Guo [China Scholarship Council, from Oct 2021]
- Haihong Li [École centrale de Lille]
- Shijie Li [Univ de Valenciennes et du Hainaut Cambrésis]
- Etienne Menager [Inria]
- Tanguy Navez [Université de Lille, from Sep 2021]
- Pierre Schegg [Robocath, CIFRE]
- Felix Vanneste [Inria, until Nov 2021]
- Ke Wu [Inria]
- Lingxiao Xun [Inria]
Technical Staff
- Alexandre Bilger [Inria, Engineer, from Mar 2021]
- Stefan Escaida Navarro [Université de Lille, Engineer]
- Thor Enrique Morales Bieze [Inria, Engineer]
- Manuela Augusta Otti [Inria, Technician, Sep 2021]
Interns and Apprentices
- Paul Chaillou [Inria, until Feb 2021]
- Martin Droulez [NC, Feb 2021]
- Nolann Duriez [NC, Jun 2021]
- Manel Ismail [NC, from Mar 2021 until May 2021]
- Corentin Languepin [Inria, from Jun 2021 until Aug 2021]
- Yueying Liang [Inria, until Mar 2021]
- Manuela Augusta Otti [Inria, from Mar 2021 until Aug 2021]
- Noé Pigret [NC, until Feb 2021]
- Paul Riviere [NC, Feb 2021]
- Esther Roubinowitz [Inria, from Mar 2021 until Aug 2021]
- Nina Tenenhaus [Inria, from Sep 2021]
- Paul Vandencasteele [NC, Feb 2021]
- Nicola Zotto [Université de Lille, from Apr 2021 until Oct 2021]
Administrative Assistant
- Anne Rejl [Inria]
Visiting Scientists
- Dewi Brunet [Université de Lille, from Sep 2021]
- Julien Ducrocq [Université de Picardie Jules Verne Amiens, from Sep 2021 until Oct 2021]
- Zhihong Zhang [CSC, from Feb 2021]
- Xingyu Zhou [China Scholarship Council, Dec 2021]
External Collaborators
- Paul Chaillou [INSERM, from Apr 2021 until Sep 2021]
- Eulalie Coevoet [Coevoet, Oct 2021, Canada]
2 Overall objectives
The team DEFROST aims to address the open problem of control and modelling methods for deformable robots by answering the following challenges:
- Providing numerical methods and software support to reach the real-time constraint needed by robotic systems: the numerical solutions for the differential equations governing the deformation generate tens of thousands degrees of freedom, which is three orders of magnitude of what is frequently considered in classical methods of robotic modelling and control.
- Integrating deformation models in the control methods of soft robot: In soft-robotics, sensing, actuation and motion are coupled by the deformations. Deformable models must be placed at the heart of the control algorithm design.
- Investigating predictable interaction models with soft-tissues and parameter estimation by visual feedback from medical imaging: on the contrary too many cases in surgical robotics, the contact of the soft robot with the anatomy is permitted and it creates additional deformations on the robot.
3 Research program
3.1 Introduction
Our research crosses different disciplines: numerical mechanics, control design, robotics, optimisation methods and clinical applications. Our organisation aims at facilitating the team work and cross-fertilisation of research results in the group. We have three objectives (1, 2 and 3) that correspond to the main scientific challenges. In addition, we have two transverse objectives that are also highly challenging: the development of a high performance software support for the project (Objective 4) and the validation tools and protocols for the models and methods (Objective 5).
3.2 Objective 1: Accurate model of soft robot deformation computed in finite time
The objective is to find concrete numerical solutions to the challenge of modelling soft robots with strong real-time constraints. To solve continuum mechanics equations, we will start our research with real-time Finite Element Method (FEM) or equivalent methods that were developed for soft-tissue simulation. We will extend the functionalities to account for the needs of a soft-robotic system:
- Coupling with other physical phenomenons that govern the activity of sensors and actuators (hydraulic, pneumatic, electro-active polymers, shape-memory alloys etc.).
- Fulfilling the new computational time constraints (harder than surgical simulation for training) and find better tradeoff between cost and precision of numerical solvers using reduced-order modelling techniques with error control.
- Exploring interactive and semi-automatic optimisation methods for design based on obtained solution for fast computation on soft robot models.
3.3 Objective 2: Model based control of soft robot behavior
The focus of this objective is on obtaining a generic methodology for soft robot feedback control. Several steps are needed to design a model based control from FEM approach:
- The fundamental question of the kinematic link between actuators, sensors, effectors and contacts using the most reduced mathematical space must be carefully addressed. We need to find efficient algorithms for real-time projection of non-linear FEM models in order to pose the control problem using the only relevant parameters of the motion control.
- Intuitive remote control is obtained when the user directly controls the effector motion. To add this functionality, we need to obtain real-time inverse models of the soft robots by optimisation. Several criteria will be combined in this optimisation: effector motion control, structural stiffness of the robot, reduce intensity of the contact with the environment etc.
- Investigating closed-loop approaches using sensor feedback: as sensors cannot monitor all points of the deformable structure, the information provided will only be partial. We will need additional algorithms based on the FEM model to obtain the best possible treatment of the information. The final objective of these models and algorithms is to have robust and efficient feedback control strategies for soft robots. One of the main challenge here is to ensure / prove stability in closed-loop.
3.4 Objective 3: Modeling the interaction with a complex environment
Even if the inherent mechanical compliance of soft robots makes them safer, more robust and particularly adapted to interaction with fragile environments, the contact forces need to be controlled by:
- Setting up real-time modelling and the control methods needed to pilot the forces that the robot imposes on its environment and to control the robot deformations imposed by its environment. Note that if an operative task requires to apply forces on the surrounding structures, the robot must be anchored to other structures or structurally rigidified.
- Providing mechanics models of the environment that include the uncertainties on the geometry and on the mechanical properties, and are capable of being readjusted in real-time.
- Using the visual feedback of the robot behavior to adapt dynamically the models. The observation provided in the image coupled with an inverse accurate model of the robot could transform the soft robot into sensor: as the robot deforms with the contact of the surroundings, we could retrieve some missing parameters of the environment by a smart monitoring of the robot deformations.
3.5 Objective 4: Soft Robotics Software
Expected research results of this project are numerical methods and algorithms that require high-performance computing and suitability with robotic applications. There is no existing software support for such development. We propose to develop our own software, in a suite split into three applications:
- The first one will facilitate the design of deformable robots by an easy passage from Computer-Aided Design (CAD) software (for the design of the robot) to the FEM based simulation.
- The second one is an anticipative clinical simulator. The aim is to co-design the robotic assistance with the physicians, thanks to a realistic simulation of the procedure or the robotic assistance. This will facilitate the work of reflection on new clinical approaches prior any manufacturing.
- The third one is the control design software. It will provide the real-time solutions for soft robot control developed in the project.
3.6 Objective 5: Validation and application demonstrations
The implementation of experimental validation is a key challenge for the project. On one side, we need to validate the model and control algorithms using concrete test case example in order to improve the modelling and to demonstrate the concrete feasibility of our methods. On the other side, concrete applications will also feed the reflexions on the objectives of the scientific program.
We will build our own experimental soft robots for the validation of Objectives 2 and 3 when there is no existing “turn-key” solution. Designing and making our own soft robots, even if only for validation, will help the setting-up of adequate models.
For the validation of Objective 4, we will develop “anatomical soft robot”: soft robot with the shape of organs, equipped with sensors (to measure the contact forces) and actuators (to be able to stiffen the walls and recreate natural motion of soft-tissues). We will progressively increase the level of realism of this novel validation set-up to come closer to the anatomical properties.
4 Application domains
4.1 Industry
Robotics in the manufacturing industry is already widespread and is one of the strategies put in place to maintain the level of competitiveness of companies based in France and to avoid relocation to cheap labor countries. Yet, in France, it is considered that the level of robotization is insufficient, compared to Germany for instance. One of the challenges is the high investment cost for the acquisition of robotic arms. In recent years, this challenge has led to the development of “generic” and “flexible” (but rigid) robotic solutions that can be mass produced. But their applicability to specific tasks is still challenging or too costly. With the development of 3D printing, we can imagine the development of a complete opposite strategy: a “task-specific” design of robots. Given a task that needs to be performed by a deformable robot, we could optimize its shape and its structure to create the set of desired motions. A second important aspect is the reduction of the manufacturing cost: it is often predicted that the cost of deformable robots will be low compared to classical rigid robots. The robot could be built on one piece using rapid prototyping or 3D printers and be more adapted for collaborative work with operators. In this area, using soft materials is particularly convenient as they provide a mass/carried load ratio several orders of magnitude higher than traditional robots, highly decreasing the kinetic energy thus increasing the motion speed allowed in presence of humans. Moreover, the technology allows more efficient and ergonomic wearable robotic devices, opening the option for exo-skeletons to be used by human operators inside the factories and distribution centers. This remains to be put in place, but it can open new perspectives in robotic applications. A last remarkable property of soft robots is their adaptability to fragile or tortuous environments. For some particular industry fields (chemistry, food industry etc.) this could also be an advantage compared to existing rigid solutions. For instance, the German company festo, key player in the industrial robotics field, is experimenting with deformable trunk robots that exhibit great compliance and adaptability, and we are working on their accurate control.
4.2 Personal and service robotics
Personal and service robotics are considered an important source of economic expansion in the coming years. The potential applications are numerous and in particular include the challenge of finding robotic solutions for active and healthy aging at home. We plan to develop functional orthosis for which it is better not to have a rigid exoskeleton that is particularly uncomfortable. These orthosis will be ideally personalized for each patient and built using rapid prototyping. On this topic, the place of our team will be to provide algorithms for controlling the robots. We will find some partners to build these robots that would fall in the category of “wearable robots”. With this thematic we also connect with a strong pole of excellence of the region on intelligent textiles (see Up-Tex) and with the strategic plan of INRIA (Improving Rehabilitation and Autonomy).
4.3 Entertainment industry and arts
Robots have a long history with entertainment and arts where animatronics have been used for decades for cinematographic shootings, theater, amusement parks (Disney's audio-animatronic) and performing arts. This year, we obtained an award for an Art Installation at the Exhibit Panorama 22. The installation “L'Érosarbénus”, which was produced at Le Fresnoy for the exhibition Panorama 22, is a collaboration between visual artist Yosra Mojtahedi and DEFROST. This installation, whose aesthetics are inspired by rocky, plant and human forms, is brought to life with the help of Soft Robotics devices. It was awarded the prize “Révélation Art Numérique — Art Vidéo 2020” by the ADAGP. See the ARTE video.
4.4 Medical Applications
Soft robots have many medical applications as their natural compliance makes them safer than traditional robots when interacting with humans. Such robots can be used for minimally invasive surgery, to access and act on remote parts of the body through minimal incisions in the patient. Applications include laparascopic and brain surgery, treatment of several cancers including prostate cancer, and cardiology, for example percutaneous coronary interventions. As an example, we received an industry grant (CIFRE) with Robocath to work on autonomous catheter navigation. See Section 9.1.
Another application is cochlear implant surgery in the project ANR ROBOCOP.
5 Social and environmental responsibility
5.1 Footprint of research activities
This year, with the health situation, we have cancelled completely our trips. Even if this situation is temporary, it has enabled us to totally reduce the carbon footprint of our activities. In the future, even if we resume our activities, we will ensure that this carbon footprint is kept low.
6 Highlights of the year
6.1 New Research Scientist join DEFROST
Quentin Peyron was successfull at the 2021 campaign of Inria competitive recruitment procedure for researchers, normal class. He joins DEFROST at the start of 2022 to work on the topic of eco-design of soft robots.
6.2 AirLab Laureate join the team for a residence
Dewi Brunet, folding artist, was awarded an AIRLab funding by the Université de Lille to be in residence in the DEFROST team for 3 months from October 2021 till January 2022, as part of his project Plantoid-Ori. Dewi will collaborate with the team to create a piece of art inspired by plants, origami and soft robotics.

6.3 ANR PRCE SPECULAR funded by ANR
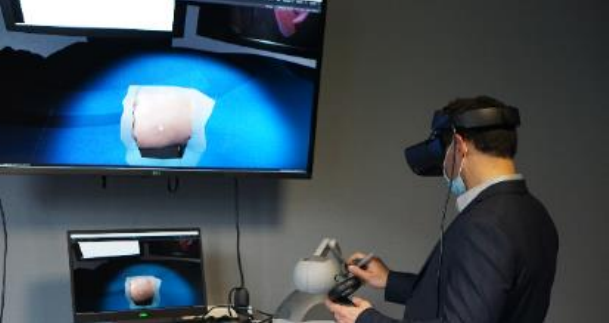
In collaboration with the Mimesis team at Inria Nancy and the company InfinyTech3D managed by Erik Pernod, DEFROST was laureate of an ANR PRCE that will be running from Jnauary 2022 till December 2024. The topic of the project will be the simulation of percutaneous liver tumor ablation in virtual reality.
6.4 Recognition for work on anatomical soft robots
At the Hamlyn Symposium, the poster describing the research and results obtained in the Cooperative Brachytherapy project 32 won the award for "Best Virtual Poster Presentation". DEFROST has notably contributed to this project with the development of a novel prostate phantom (see Sec.8.2). These results are encouraging for pursuing the research direction of creating anatomical soft robots, i. e. devices that represent human organs. Numerical modeling, control, sensing, and fabrication come together to create devices that mimic organs in their physical properties and behavior. The coupling with the numerical simulation is essential for providing control signals as well as interpreting the sensor readings.
6.5 Cover of the Soft Robotics journal
Art-science collaboration between Yosra Mojtahedi and Stefan Escaida Navarro led to a piece of art that made the cover of the International journal Soft Robotics (SoRo).
7 New software and platforms
7.1 New software
7.1.1 SOFA
-
Name:
Simulation Open Framework Architecture
-
Keywords:
Real time, Multi-physics simulation, Medical applications
-
Functional Description:
SOFA is an Open Source framework primarily targeted at real-time simulation, with an emphasis on medical simulation. It is mostly intended for the research community to help develop new algorithms, but can also be used as an efficient prototyping tool. Based on an advanced software architecture, it allows the creation of complex and evolving simulations by combining new algorithms with algorithms already included in SOFA, the modification of most parameters of the simulation (deformable behavior, surface representation, solver, constraints, collision algorithm etc.) by simply editing an XML file, the building of complex models from simpler ones using a scene-graph description, the efficient simulation of the dynamics of interacting objects using abstract equation solvers, the reuse and easy comparison of a variety of available methods.
-
News of the Year:
The new version v20.06 has been released including new elements on SoftRobots + ModelOrderReduction integration, in addition to an improved architecture and lots of cleans and bugfixes.
- URL:
-
Contact:
Hugo Talbot
-
Participants:
Christian Duriez, François Faure, Hervé Delingette, Stephane Cotin, Hugo Talbot, Maud Marchal
-
Partner:
IGG
7.1.2 SoftRobots
-
Name:
SoftRobots plugin for Sofa
-
Keywords:
Numerical simulations, Problem inverse, Soft robotics
-
Functional Description:
This plugin allows the modeling of deformable robots in the Sofa platform. It allows the modeling of different actuators, such as cable, pneumatic pressure, hydraulics and other simpler types of actuation. It also contains useful tools for animation design or communication with the robot. Coupled with the SoftRobots.Inverse plugin, it also allows the control of these robots. More information can be found on the dedicated website.
- URL:
-
Contact:
Christian Duriez
-
Participants:
Christian Duriez, Olivier Goury, Jérémie Dequidt, Damien Marchal, Eulalie Coevoet, Félix Vanneste
7.1.3 Model Order Reduction Plugin for SOFA
-
Name:
Model Order Reduction Plugin for SOFA
-
Keywords:
Model Order Reduction, Sofa, Finite element modelling
-
Scientific Description:
This plugin allows speed-up of SOFA simulations by providing tools to create a reduced version of the SOFA simulation that runs at much higher rates but remains accurate. Starting with a snapshot of the object deformations on a high-dimensional Finite Element mesh, Proper Orthogonal Decomposition (POD) is used to compute a reduced basis of small dimension representing correctly all the possible deformations of the object. The original system describing the object motion is then greatly reduced. To keep numerical efficiency, a hyper-reduction method is used to speed-up the construction of the reduced system.
-
Functional Description:
This plugin allows to dramatically reduce computational time in mechanical simulation in the SOFA framework. A reduced simulation, of much smaller dimension but still accurate is created in an automatic way by the plugin. Building the reduced model may take time, but this operation is made once only. The user can then benefit from a reduced and interactive version of his/her simulation without significant loss of accuracy.
-
Release Contributions:
This is the first version of the plugin.
-
News of the Year:
Publication using this plugin accepted in IEEE Robotics and Automation Letters (RA-L)
- URL:
- Publication:
-
Contact:
Olivier Goury
-
Participants:
Olivier Goury, Félix Vanneste, Christian Duriez, Eulalie Coevoet
7.1.4 SoftRobots.Inverse
-
Name:
SoftRobots.Inverse
-
Keywords:
Sofa, SoftRobots
-
Scientific Description:
This plugin implements a method to compute the inverse model of a robot in its environment. The input of the method is the desired position of the effector. The output is the force or the motion that needs to be applied to the actuators in order to minimize the distance with the effector position. This is found by minimizing the constraint equation using Quadratic Programming (QP), i.e. minimizing the violation of the defined constraints.
-
Functional Description:
This plugin builds on the plugin SoftRobots. Inside the plugin, there are some constraint components that are used to describe the robot (effectors, actuators, sensors). An optimisation algorithm is provided to find the efforts to put on actuators in order to place the robot in the closest possible configuration to the one described by “effectors”, or to a state described by “sensors”. This method used to control the soft robots in the task space is patented.
- URL:
- Publication:
-
Contact:
Christian Duriez
-
Participants:
Christian Duriez, Eulalie Coevoet
-
Partners:
CNRS, Université de Lille, Ecole Centrale de Lille
7.1.5 SofaPython3
-
Name:
SofaPython3
-
Keywords:
Python, Numerical simulations, Sofa
-
Functional Description:
This plugin allows to use Sofa as a library from any python3 program. It also allows to write new mechanical component for a Sofa simulation in python3.
-
Release Contributions:
Python3 and SOFA are meeting in one plugin: SofaPython3. In 2020, the integration of this plugin within SOFA opens up new perspectives. Not only can a SOFA simulation be described using a Python script with the embedded Python interpreter, but one or several SOFA instances can now created from a Python environment. Even more powerful, you can create new components (e.g. forcefields) in Python using the bindings provided in the plugin. Python-scripted simulations have no limit anymore!
-
News of the Year:
Python3 and SOFA are meeting in one plugin: SofaPython3. In 2020, the integration of this plugin within SOFA opens up new perspectives. Not only can a SOFA simulation be described using a Python script with the embedded Python interpreter, but one or several SOFA instances can now created from a Python environment. Even more powerful, you can create new components (e.g. forcefields) in Python using the bindings provided in the plugin. Python-scripted simulations have no limit anymore!
- URL:
-
Contact:
Hugo Talbot
-
Participants:
Jean-Nicolas Brunet, Damien Marchal, Bruno Marques, Thierry Gaugry, Frédérick Roy, Guillaume Paran, Hugo Talbot
7.1.6 SofaQtQuick
-
Name:
runSofa2
-
Keywords:
Sofa, GUI (Graphical User Interface), Modeling, Physical simulation
-
Functional Description:
Smooth the user experience with Sofa By integrating authoring features into runSofa so we can design simulation in an integrated environment. We should be able to model scenes, simulate & debug them.
This tool replaces the old “runSofa” interface, today deprecated but still in use by most SOFA users.
SofaQtQuick provides a fluid and dynamic user experience for SOFA, thanks to the integration of authoring tools to design complex simulations directly in the 3D environment, rather that scripting them as it is done today.
FEATURES: Scene graph editing Interactive modeling Project oriented approach Prefab as reusable and parametric object 2D Canvas Custom widgets per component Live coding Node base interface for data link debugging Everything with a non-linear workflow
Based on a code gift from Anatoscope, stringly inspired by Blender & Unity's workflow.
-
Release Contributions:
1st Beta version, unstable, but testable
- URL:
-
Contact:
Christian Duriez
7.1.7 Cosserat plugin
-
Keywords:
Physical simulation, Finite element modelling, Soft robotics, Needle insertion, Frictional contact
-
Functional Description:
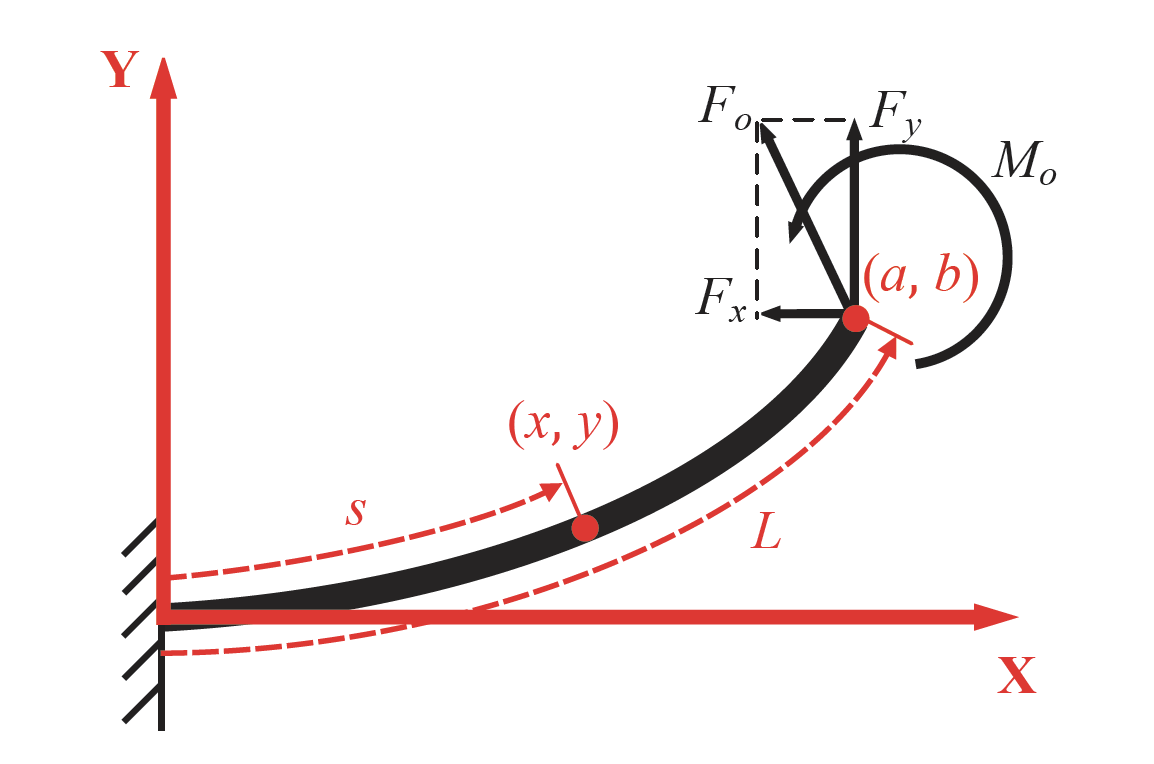
The cosserat model has been introduced in continuum robotics to simulate the deformation the robot body whose geometry and mechanical characteristics are similar to a rod. By extension, this model can be used to simulate needles and sutures or wires. The specificity of Cosserat's theory from the point of view of the mechanics of continuous media is to consider that the set of material points consists of rigid solids (3 translations, 3 rotations), where most other models of continuum media mechanics consider the material points as particles (3 translations). For the modeling of linear structures, it is therefore possible to find a framework very close to the articulated solids with a series of rigid solids whose relative position is defined by a strain state. This model can be used to model and control concentric tube robots, continuum robots actuated with cables or pneumatic soft robots with a constant cross-section. There are several formalism to model Cosserat rods. In this plugin, we have developed the Piecewise Constant Strain (PCS) presented by Federico Renda in the SOFA framework.
- URL:
-
Authors:
Yinoussa Adagolodjo, Christian Duriez, Federico Renda
-
Contact:
Christian Duriez
7.2 New platforms
7.2.1 Prostate Phantom
Participants: Stefan Escaida Navarro, Manuela Otti.
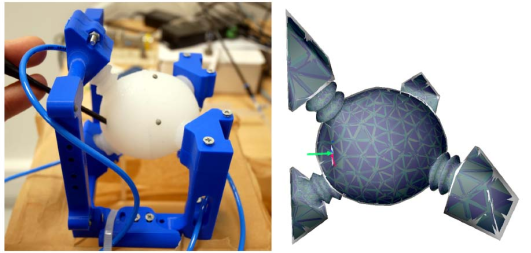
In the context of the Cooperative Brachytherapy (CoBra) project, a novel prostate phantom to study needle-insertion based interventions, such as LDR brachytherapy, was developed. This devices was conceived using soft robotics fabrication and modeling techniques previously researched within the team 3. In the corresponding paper 12, it is described how the phantom is equipped with sensors and coupled with the simulation in order to estimate external forces acting on the device. The deformation/motion of the phantom due to this forces is also captured and it was shown that they are plausible from a clinical point of view.
7.2.2 Trunk Robot
Participants: Ke Wu, Gang Zheng.
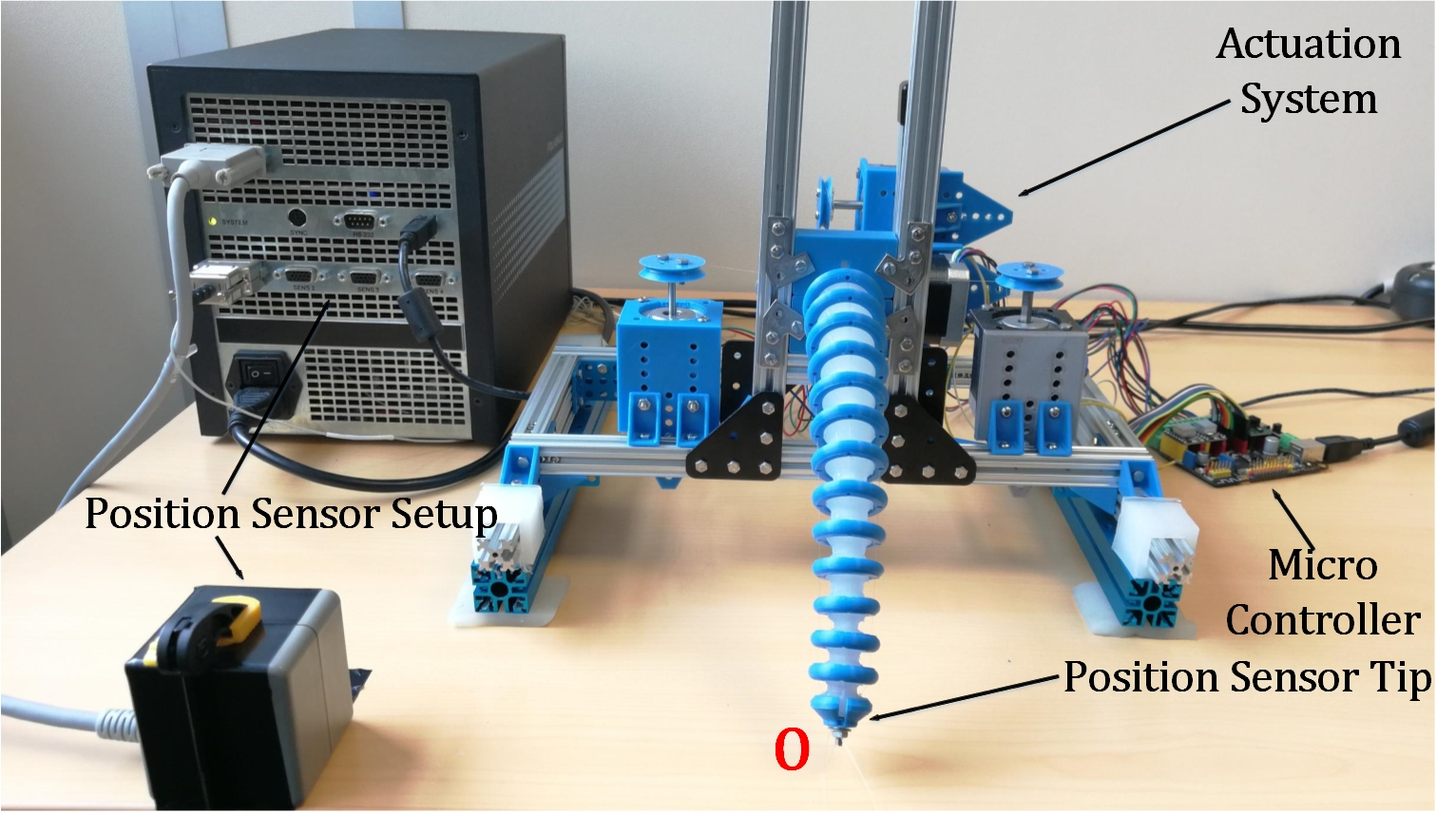
This platform is mainly composed of three parts: actuation system, micro controller, position sensor system. It is made of controlling cable-driven soft robots, such as the soft trunk robot shown in Fig. 5. Some research work has been completed on this platform: 2124
8 New results
8.1 Real-Time Simulation For Control Of Soft Robots With Self-Collisions Using Model Order Reduction For Contact Forces
Participants: Olivier Goury, Bruno Carrez, Christian Duriez.
In rigid robotics, self-collision are usually avoided since it leads to a failure in the robot control and can also cause damage. In soft robotics, the situation is very different, and self-collisions may even be a desirable property, for example to gain artificial stiffness or to provide a natural limitation to the workspace. However, the modeling and simulation of self-collision is very costly as it requires first a collision detection algorithm to detect where collisions occur, and most importantly, it requires solving a constrained problem to avoid interpenetrations. When the number of contact points is large, this computation slows down the simulation dramatically. In this work, we applied a numerical method to alleviate the contact response computation by reducing the contact space in a lowdimensional positive space obtained from experiments. We showed good accuracy while speeding up dramatically the simulation. We applied the method in simulation on a cable-actuated finger and on a continuum manipulator performing exploration. We also showed that the reduced contact method proposed can be used for inverse modeling. The method can therefore be used for control or design. This work was published in 14, and see Figure 6.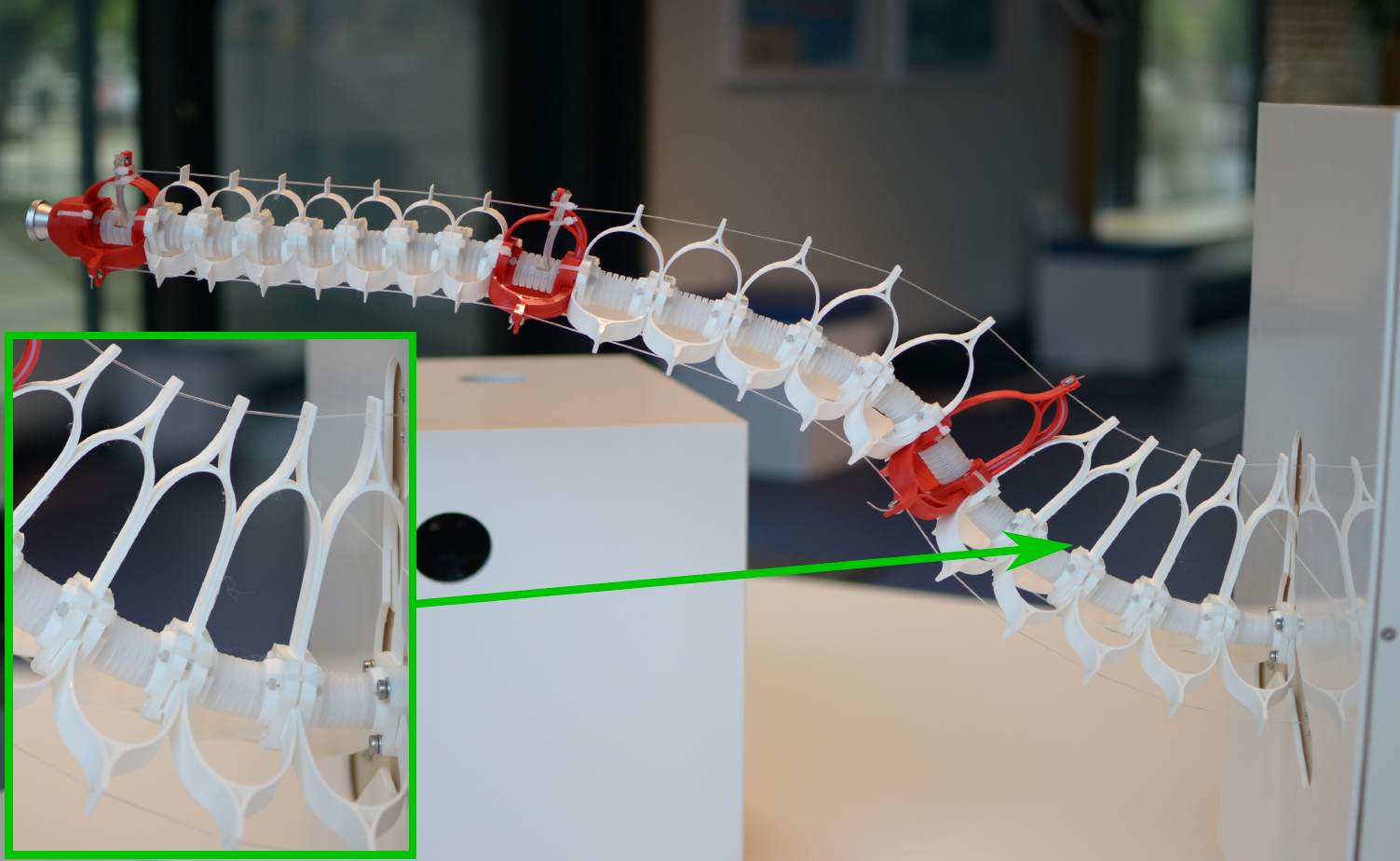
Flexible manipulator robot.
8.2 A Bio-Inspired Active Phantom for Adaptive Interventions
Participants: Stefan Escaida Navarro, Christian Duriez.
In the context of the Cooperative Brachytherapy (CoBra) project, a novel prostate phantom for the study of needle-insertion based interventions, such as LDR brachytherapy, was developed. This devices was conceived using soft robotics fabrication and modeling techniques previously researched within the team 3. In the corresponding paper 12, it is described how the phantom is equipped with sensors and coupled with the simulation in order to estimate external forces acting on the device during needle insertion. The deformation/motion of the phantom due to this forces is also captured and it was shown that they are plausible from a clinical point of view.
8.3 Proximity Perception in Human-Centered Robotics: A Survey on Sensing Systems and Applications
Participants: Stefan Escaida Navarro, Christian Duriez.
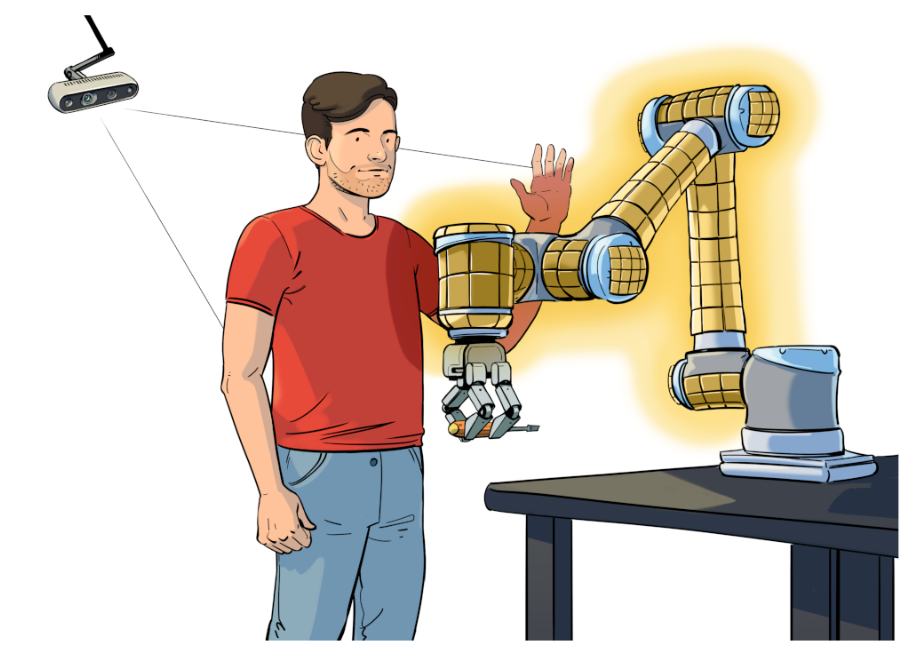
In 2021, a survey paper on the subject of proximity perception in human-centered robotics was finalized 13. Proximity sensors can help in closing the gap between visual and tactile perception (see Fig. 8) in robotics. The content of this survey was inspired and based upon the discussions and exchanges that took place in the Workshops on Proximity Perception in Robotics which were held at IROS 2018-2021.
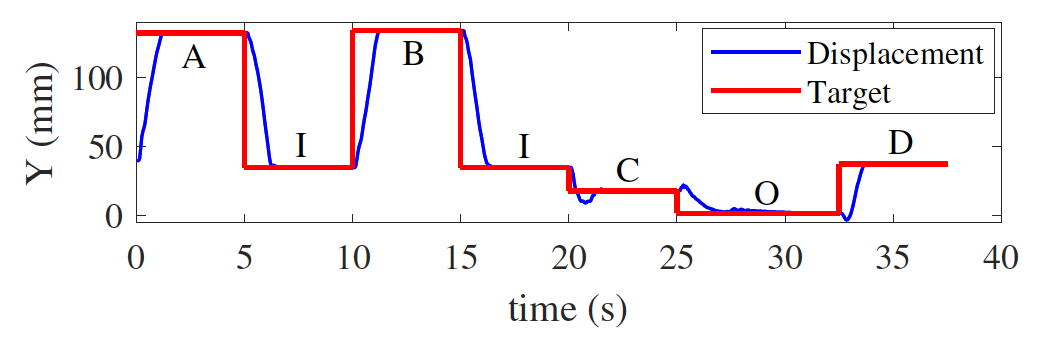
8.4 FEM-based Gain-Scheduling Control of a Soft Trunk Robot
Participants: Ke Wu, Gang Zheng.
This work, published in IEEE Robotics and Automation Letters 21, demonstrates a gain-scheduling closed-loop method to control a soft trunk robot operating within its workspace by using Finite Element Method (FEM). The main idea of this method is to divide the workspace into several sub-workspaces where the most suitable gains are applied correspondingly in each sub-workspace. As a result, it becomes feasible to control the trunk by gain scheduling when crossing from one sub-workspace to another as well as considering its dynamic characteristics. The derivation of the method is presented accordingly. In the end, the proposed method is validated by experiments (See the illustration in Figure 9).
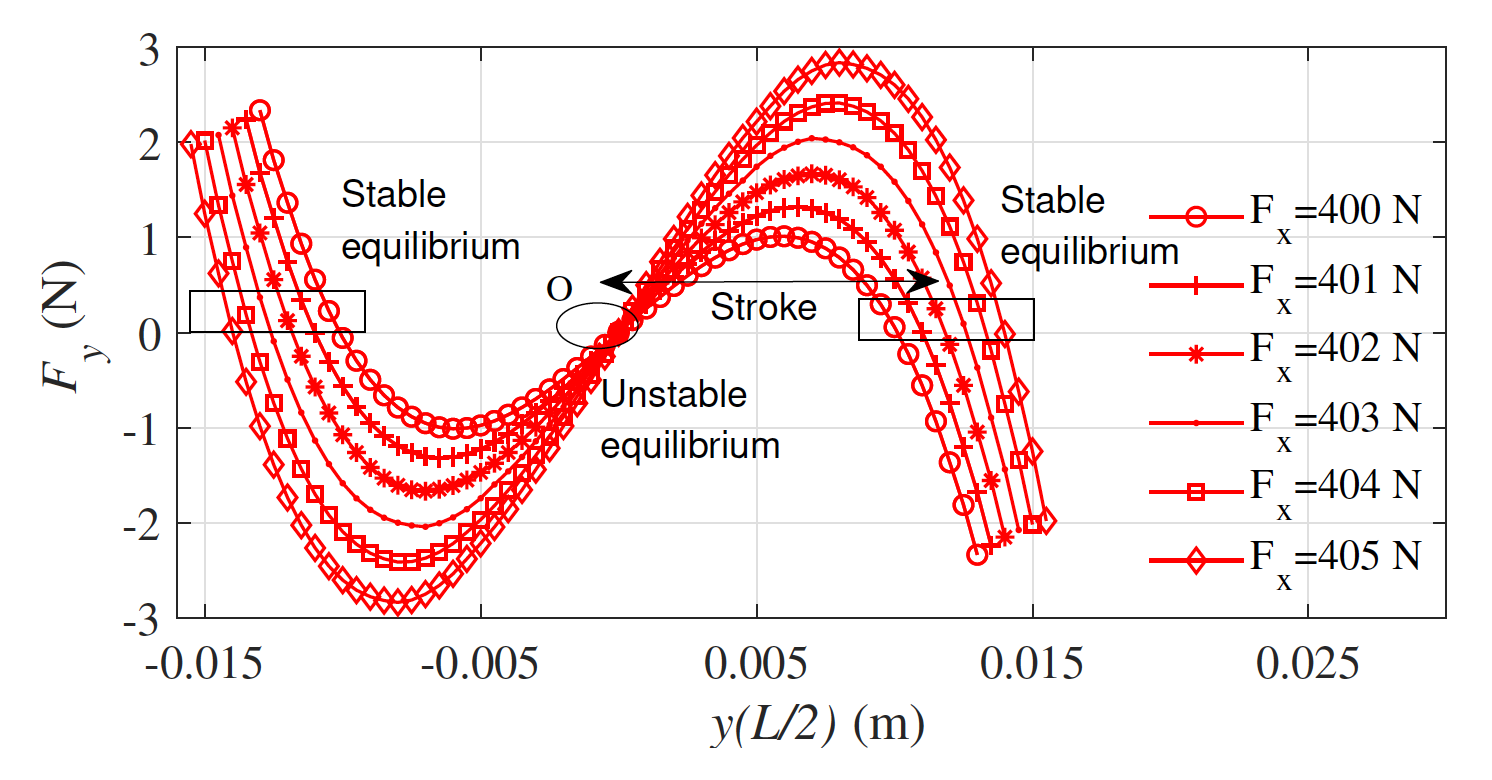
8.5 Theoretical Analysis on Nonlinear Buckling, Post-Buckling of Slender Beams and Bi-Stable Mechanisms
Participants: Ke Wu, Gang Zheng.
Compliant Mechanisms (CMs) are used to transfer motion, force and energy, taking advantages of the elastic deformation of the involved compliant members. A branch of special type of elastic phenomenon called (post) buckling has been widely considered in CMs: avoiding buckling for better payload-bearing capacity and utilizing post-buckling to produce multi-stable states. This work digs into the essence of beam’s buckling and post-buckling behaviors where we start from the famous Euler–Bernoulli beam theory and then extend the mentioned linear theory into geometrically nonliner one to handle multi-mode buckling problems via introducing the concept of bifurcation theory. Five representative beam buckling cases are studied in this paper, followed by detailed theoretical investigations of their post-buckling behaviors where the multi-state property has been proved. We finally propose a novel type of bi-stable mechanisms termed as Pre-buckled Bi-stable Mechanisms (PBMs) that integrate the features of both rigid and compliant mechanisms. The theoretical insights of PBMs are presented in detail (see Figure 10).
8.6 Efficient spatial compliance analysis of general initially curved beams for mechanism synthesis and optimization
Participants: Ke Wu, Gang Zheng.
Compliant Mechanisms (CMs) present several desired properties for mechanical designs. Conventional rigid-body mechanisms composed of rigid links connected at kinematic joints, serve as devices to transfer motion, force and energy by the movements of rigid links whereas CMs are able to present the same function only through deflection of flexible members. Most designs of CMs in the current literature employ straight beams as the elementary flexible members whereas initially curved beams (ICBs) also provide potential advantages for CMs such as large range of motion and small strain range. This work presents an efficient spatial compliance analysis method of general ICBs. The spatial compliance analysis of different types of ICBs (such as varying-curvature beams and varying-cross-section beams) was conducted, followed by Finite Element Analysis (FEA) verification. Next, the modeling and optimization of two types of CMs including ICB-based parallelogram mechanisms and ICB-based Ortho-planar springs were carried out by applying screw theory under the framework of position space concept and parameter normalization strategy where a class of anti-buckling translational parallelograms with high load-bearing capacity and a type of compact 2R1T (2 rotational DOF and 1 translational DOF) compliant kinematic joints were obtained. The corresponding FEA was conducted to verify the optimal results (see Figure 11).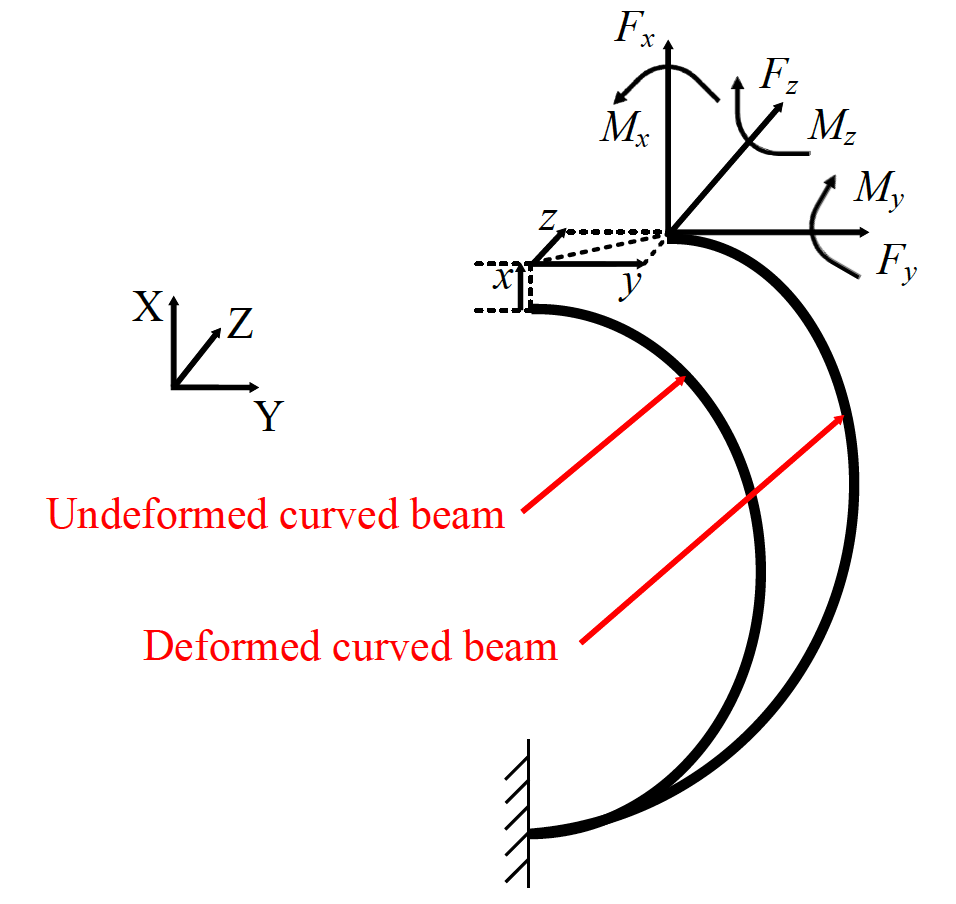
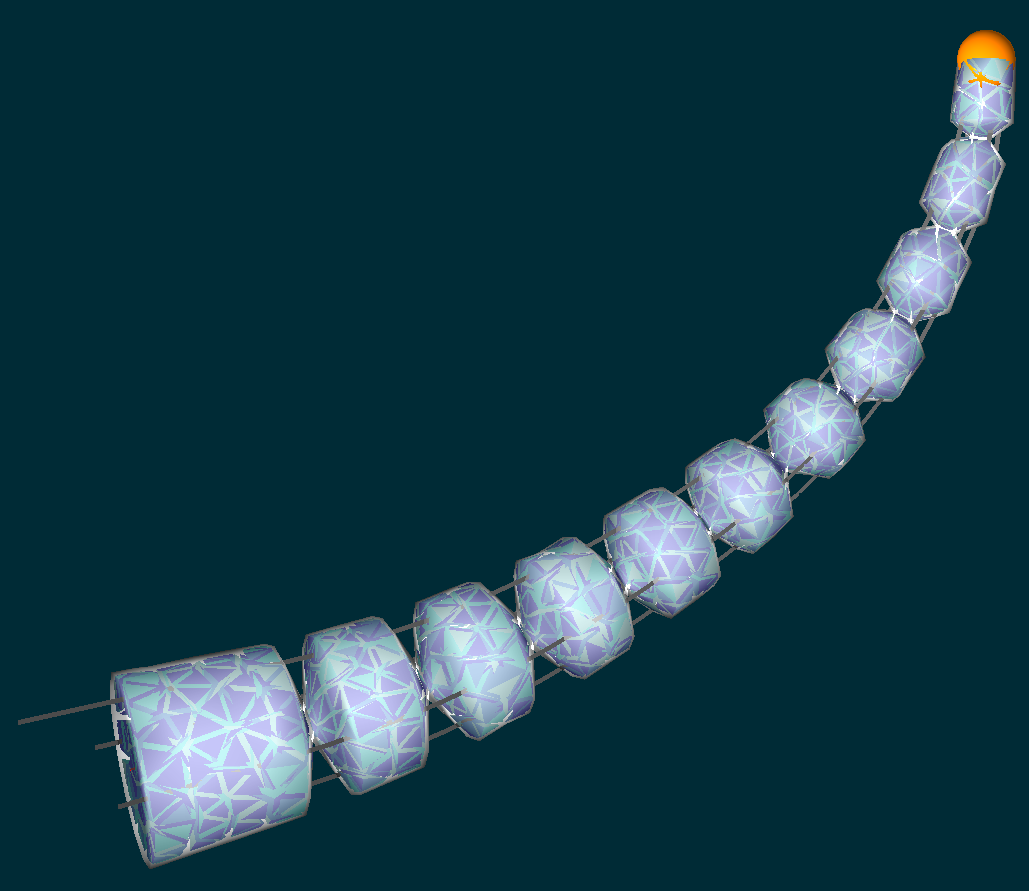
8.7 Discrete Cosserat Method for Soft Manipulators Workspace Estimation: An Optimization-Based Approach
Participants: Walid Amehri, Gang Zheng, Alexandre Kruszewski.
This work investigates the workspace estimation of soft manipulators. Given a configuration of such a soft robot, with the bounded actuators, the Discrete Cosserat method is adopted to deduce the mathematical model of soft manipulators, based on which an optimization-based approach is proposed to estimate the workspace. Implemented to various soft manipulators’ configurations, numerical simulations are provided to highlight the feasibility of the proposed methodology (see Figure 12).
8.8 FEM-based trajectory tracking control of a soft trunk robot
Participants: Ke Wu, Gang Zheng.
As a novel class of robots, soft robots have demonstrated many desirable mechanical properties than traditional rigid robots due to their nature of being compliant, flexible and hyperredundant, such as great adaptability to unknown environments, safe human robot interaction (HRI), energy-saving actuation and the maneuverability to display diverse mechanical properties. However, its inherent high-DoF nature would result in some complex nonlinear behaviors, and their kinematic or dynamic models are therefore harder to deduce than the ones of conventional rigid robots. In this work, we propose a trajectory tracking control strategy for a soft trunk robot based on Finite Element Method (FEM). We first plan a feasible trajectory for the studied robot in SOFA (a FEM-based simulator) by solving a model-prediction-control (MPC)-based optimization problem. The second step is to conduct linearization around the pre-designed trajectory, based on which an associated controller can be then developed. The detailed derivation of the mentioned work is explained accordingly. In the end, the results of experimental validation is presented to prove the feasibility of the proposed method (see Figure 13).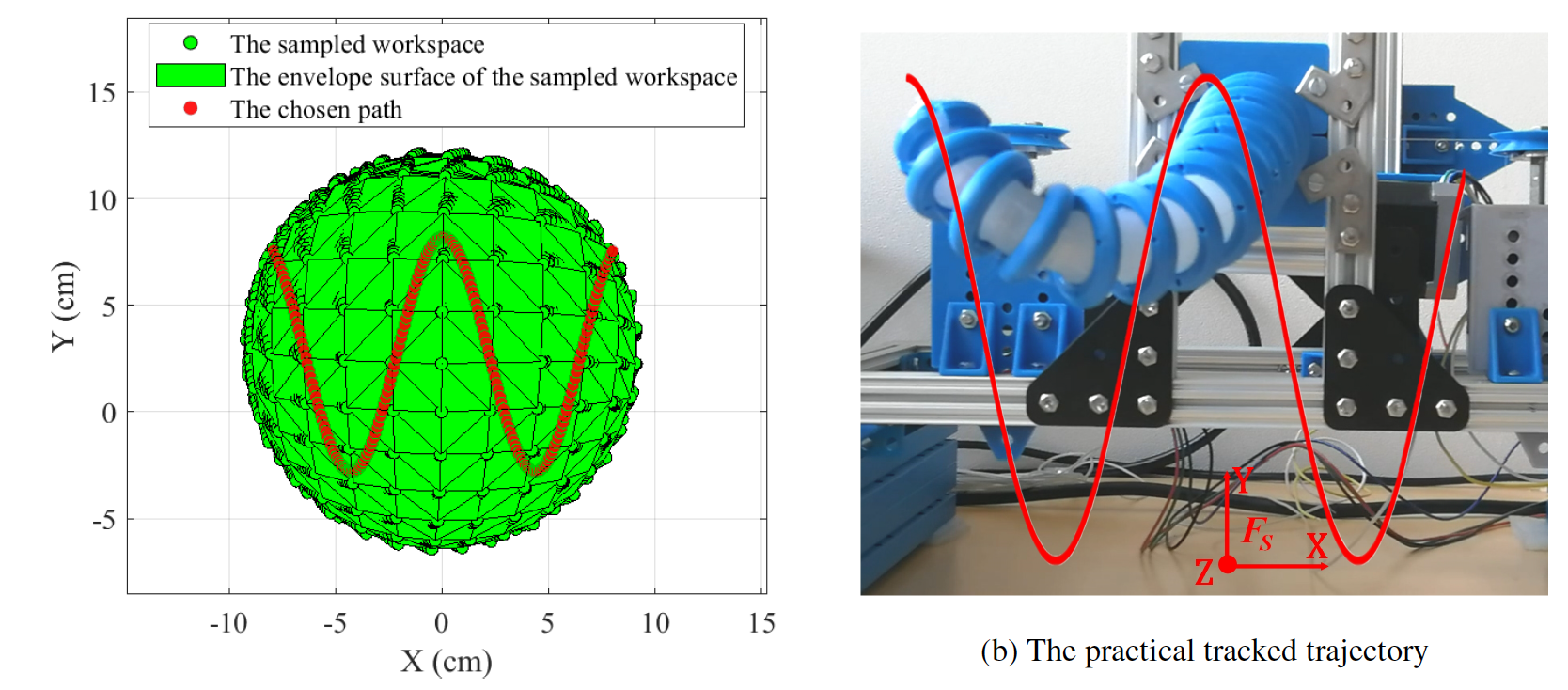
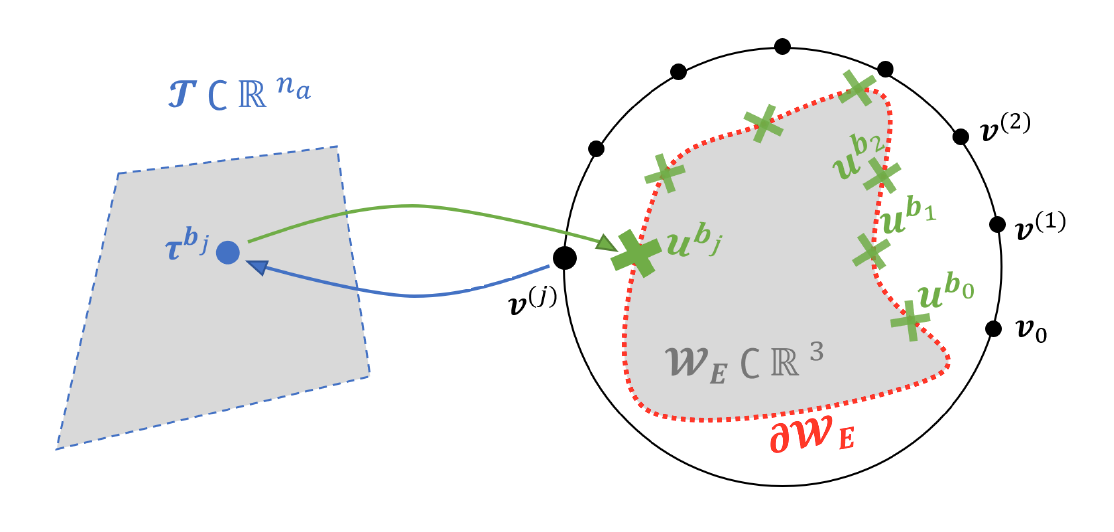
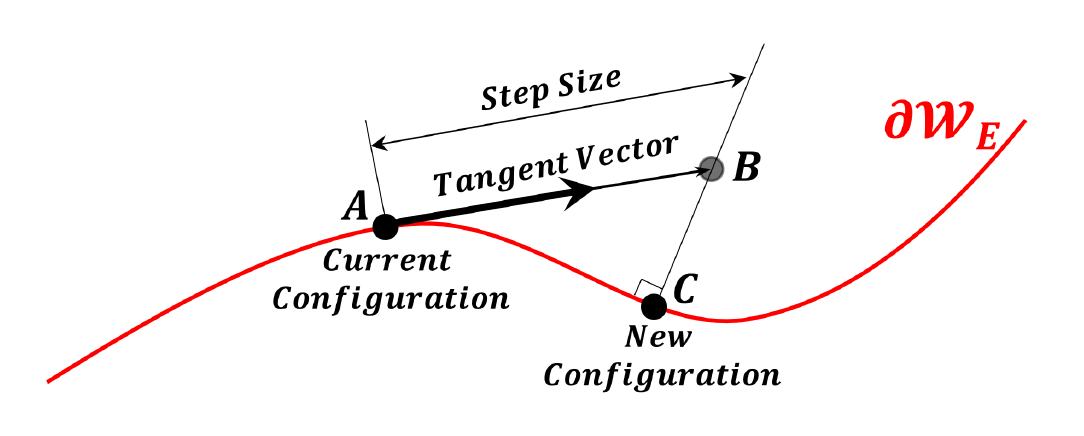
8.9 Workspace Boundary Estimation for Soft Manipulators Using a Continuation Approach
Participants: Walid Amehri, Gang Zheng, Alexandre Kruszewski.
Considering a soft manipulator configuration, controlled via installed bounded actuators, this work addresses the end-effector workspace estimation problem for such a soft robot. For this, the Discrete Cosserat method is adopted to deduce the mathematical model of soft manipulators, based on which a continuation method that accounts for simple and multiple bifurcation points to solution curves is developed to map its workspace boundaries. Difficulties encountered in calculating tangents at simple and multiple bifurcation points are studied, and an efficient solution is provided. Numerical simulations applied to planar and spatial soft manipulator configurations are presented to emphasize the validity of the proposed methodology (see Figure 14).
8.10 A comprehensive static modeling methodology via beam theory for compliant mechanisms
Participants: Ke Wu, Gang Zheng.
Compliant Mechanisms (CMs) present several desired properties for mechanical applications only depending on elastic deformation of the involved compliant beams/flexures. As reported in the current literature, most CM designs utilize straight beams and initially curved beams (ICBs) as the fundamental flexible members. In CM research community, many great contributions regarding modeling these elementary flexible members have been achieved. In this work, a comprehensive modeling methodology, based on beam theory, has been established to characterize the static planar deflection of slender beam. Then such a methodology has been applied to solve 8 loading scenarios of large beam-deflection problems that exist in the design of CMs. Essentially speaking, all these beam-deflection problems are treated as a type of boundary value problems (BVPs) of an ordinary differential equation (ODE) and solved by a modified collocation method. After that, this methodology has been used to model some representative CMs with large-deflection strokes, such as compliant parallelograms (see Figure 15).
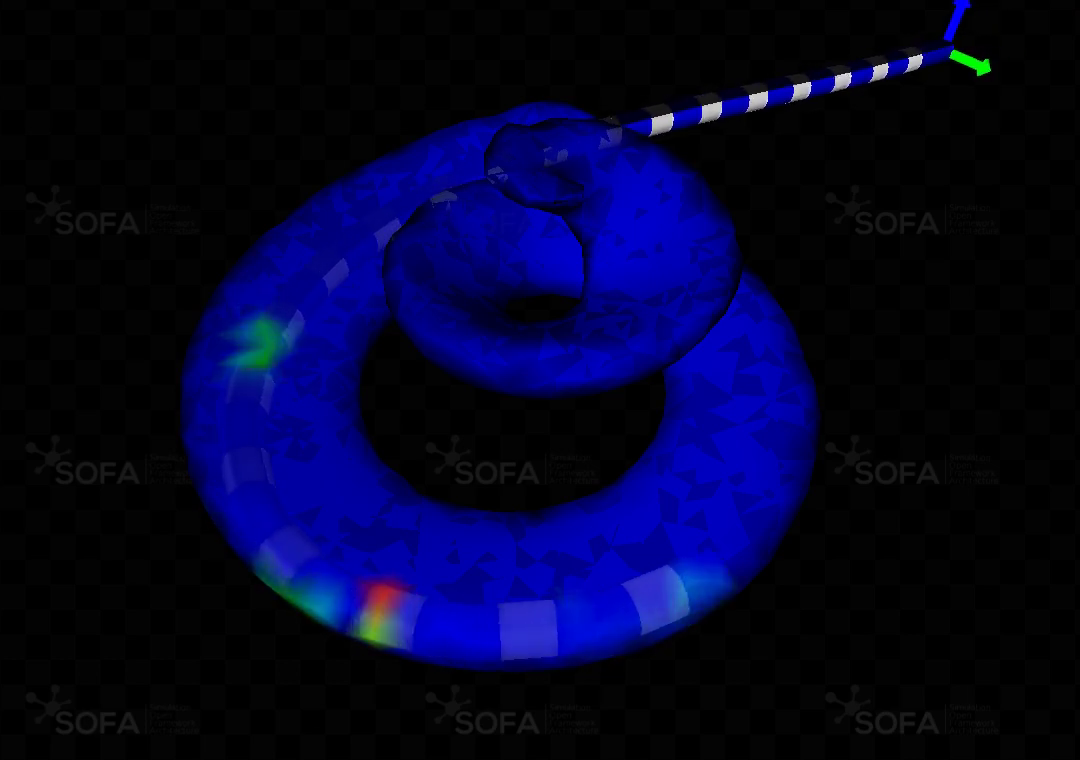
8.11 Coupling numerical deformable models in global and reduced coordinates for the simulation of the direct and the inverse kinematics of Soft Robots
Participants: Yinoussa Adagolodjo, Christian Duriez.
In this contribution, we propose a method to combine the Finite Element Method (FEM) with Discrete Cosserat Modeling (DCM) to capture the mechanics and the actuation of soft robots. The FEM is used to simulate the non-linear behavior of the volume of the soft structure while the cable/rod used for the actuation is modeled using the DCM. The two models are linked using kinematic constraints without imposing meshing rules. We demonstrate that both direct and inverse kinematic models can be obtained by quadratic optimization. The originality of this coupling is that the FEM model uses global coordinates (the positions of the nodes of the mesh are in global space) while the Cosserat model uses local coordinates (successive strain values). The coupling of these mechanical models allows to combine the best of each parametrization. On the one hand, FEM allows to capture the behavior of the volume structure of the robot while accounting for its geometry with a complex mesh. On the other hand, the DCM allows efficient modeling of 1D structures such as rods, (concentric) tubes, cables, etc. that are used to deform the volume structure of the soft robots. DCM handles large deformation, torsion and (in)-extensibility and is efficient to compute. Moreover, the approach is compatible with complementarity constraints introduced when modeling contact and friction of the robot with its environment as well as the self-collision. The Figure 16 shows the inverse simulation of a soft silicone tentacle modeled in FEM and actuated by 4 cables models in reduced coordinates by DCM.
8.12 Enabling the control of a new degree of freedom by using anisotropic material on a 6-DOF parallel soft robot
Participants: Félix Vanneste, Olivier Goury, Christian Duriez.
In this contribution, we design in simulation and build a parallel soft robot with a 6 degrees of freedom (DOF) end-effector. We show that by using a 3D-printed meso-structured material which displays an anisotropic behaviour, we can modify the kinematics of the structure in order to control one additional DOF which is not possible to achieve using a standard isotropic and homogeneous material like silicone. The behaviour of the robot is simulated using numerical homogenization and the finite element method (FEM), which runs in real-time and can be used for control. We finally show that the parallel soft robot we have built is controllable in open loop thanks to the use of inverse simulation. We demonstrate its maneuverability by guiding a marble in a maze game.
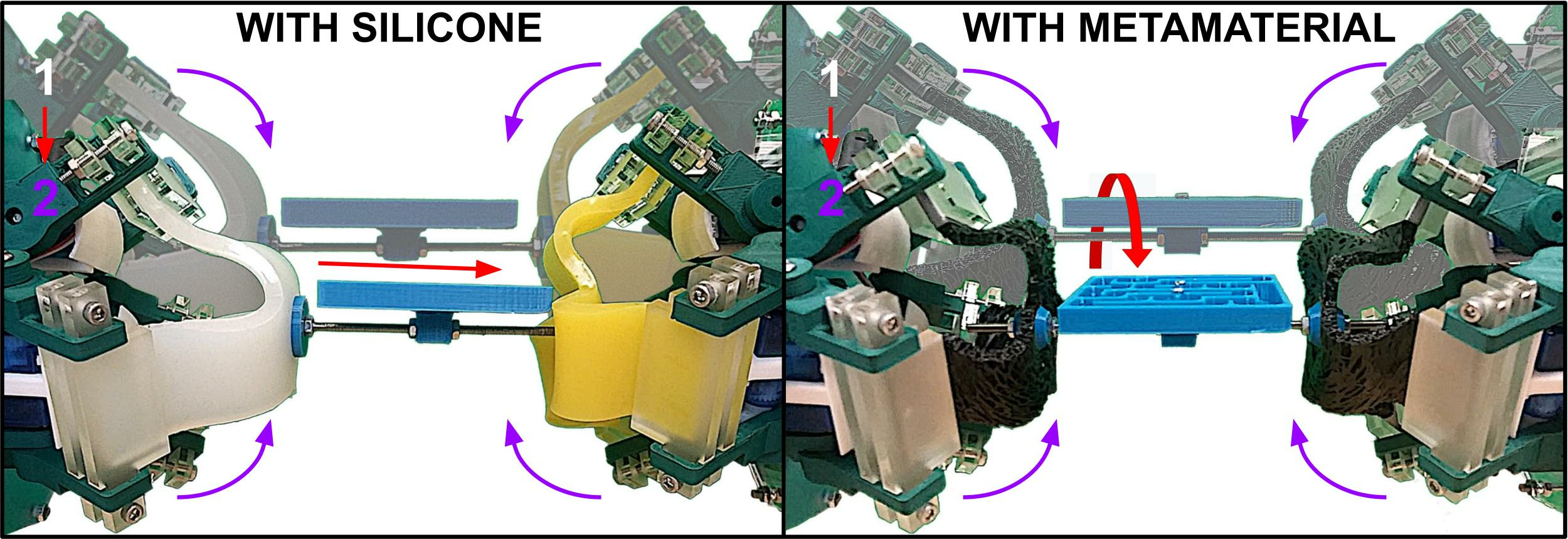
creation of an additional DOF with metamaterial
9 Bilateral contracts and grants with industry
9.1 Bilateral grants with industry
Participants: Pierre Schegg, Christian Duriez, Jeremie Dequidt.
Robocath is a French startup located in Rouen which is providing a robotic solution for catheter navigation to avoid exposure of the physician to X-rays. We have a collaboration through the CIFRE thesis of Pierre Schegg. The goal is to provide automatic planning for navigation of the guide and catheter for interventions in cardiology. We obtained significant results that are currently in submission. A patent has been filed by the company.Participants: Olivier Goury, Christian Duriez.
InfinyTech3D is a small french starting company which develops virtual reality solutions based on SOFA. As part of a contract Infinytech3D had with Follou to integrate their medical haptic interface to SOFA, we proposed an expertise and consulting contract to InfinyTech3D. This allowed us to document a part of the SOFA code on collision detection, response and haptics. An ANR project has just been accepted in collaboration with this company and the Inria MIMESIS team in StrasbourgParticipant: Christian Duriez, Jeremie Dequidt.
Caranx Medical is a startup company focusing on surgical robotics. Their aim is to revolutionize surgery with novel ground-breaking surgical robots. We are about to sign a contract (January 2022) for starting a collaboration through CIFRE PhD thesis.10 Partnerships and cooperations
10.1 International initiatives
10.1.1 Associate Teams in the framework of an Inria International Lab or in the framework of an Inria International Program
AC/DC
Participants: Thor Moralez Bieze, Christian Duriez.
-
Title:
A Charm lab / Defrost team Collaboration
-
Duration:
2019 -> 2022
-
Coordinator:
Allison Okamura (aokamura@stanford.edu) and Christian Duriez
-
Partners:
- Stanford University
-
Inria contact:
Christian Duriez
-
Summary:
This associated team aims to develop collaborations around soft robots and haptic interfaces. This year, we have worked on the publication of an article about the Lianford platform which allows haptic feedback on a soft parallel robot. The paper has been submitted in November 2021 to IJRR. Unfortunately, it was not possible to organize a trip to the USA this year due to the health crisis.
STEER
Participant: Gang Zheng.
-
Title:
Soft exoskeletons with variable properties
-
Duration:
2021 -> 2023
-
Coordinator:
Gang Zheng and Dingguo Zhang
-
Partners:
- University of Bath, UK
-
Inria contact:
Gang Zheng
-
Summary:
This Inria Lille North European Lab aims at developing wearable soft exoskeletons with variable damping or stiffness for helping disable people by developing new soft exoskeletons that may become hard at the period of supporting weight and transferring power, and then become soft at the working mode.
10.2 European initiatives
10.2.1 FP7 & H2020 projects
Participants: Stefan Escaida Navarro, Camille Krewcun, Nina Tenenhaus, Christian Duriez.
- SimCardioTest: Simulation of Cardiac Devices & Drugs for in-silico Testing and Certification. This is a four-year H2020 project that started in January 2021 and is coordinated by Research Director Maxime Sermesant at Inria Sophia Antipolis - Méditerranée. The aim of the project is to support the development of new devices as well as drug treatments for heart diseases with computational modeling, while guaranteeing that the corresponding numerical simulations are compliant with regulatory requirements. Work in the team focuses on the simulation of pacemaker lead navigation and fatigue, as well as on the development of a beating heart phantom for validation.
10.3 National initiatives
Participants: Lingxiao Xun, Yinoussa Adagolodjo, Olivier Goury, Christian Duriez, Alexandre Kruszewski, Gang Zheng.
-
ROBOCOP: Robotization of Cochlear implant. This is a 4-year project, supported by the ANR (French National Agency for Research) in the framework of PRCE, starting from 1 October 2019 until 30 September 2023. ROBOCOP aims at creating a new prototype of cochlear implant, and robotize (i.e. actuate and control) its insertion process to facilitate the work of surgeon, to increase the success ratio, and to decrease the probability of trauma.
Our contributions this year on the project can be divided into two points.
- The first was to propose a simulator to our industrial partner Oticon. The objective of this simulator is to provide a reliable and low cost test environment (see 18) for cochlear implants marketed by the company. The experiments are continuing and a validation phase of the simulator by the company's engineers is scheduled for early February.
Simulation of the insertion of a cochlear implant.
Figure 18: Simulation of the insertion of a cochlear implant while showing the forces induced by contact with the cochlea. The quantification of this force makes it possible to locate the most solicited areas of the latter. - In order to build a new generation of cochlear implant. We first propose, a mathematical model that connects the input voltages and the curvatures of the actuators used in the modeling of the cochlear. This work led to an article that will be published in a very close future. In a second step, we organize a study on the optimal design of the new implant. In this regard, we proposed a simulation based on the sofa frame to model the new implant. We do a recurring exchange with our Valencian laboratory partners to compare the results of the simulation with those of experimentation.
The associated GitLab project..
Participants: Yinoussa Adagolodjo, Olivier Goury, Christian Duriez, Gang Zheng.
- The first was to propose a simulator to our industrial partner Oticon. The objective of this simulator is to provide a reliable and low cost test environment (see 18) for cochlear implants marketed by the company. The experiments are continuing and a validation phase of the simulator by the company's engineers is scheduled for early February.
-
Cosseroot: Cosserat Rod Theory for Slender Robots. This is a 4 year project, supported by the ANR (French National Agency for Research) in the framework of PRC, starting from 1 November 2020 until 31 October 2024. The objective of COSSEROOTS project is to systematically investigate the relative parameterization modeling technique in order to create for the first time a toolbox dedicated to modeling and control of slender, flexible, continuous, bio-inspired robots that can undergo large, controlled deformations. associated GitHub project.
Contributions around this project this year can be grouped under two points.
- First, on the software aspect. We have proposed two stable versions (V21.06 and V21.12) of the software compatible with the same versions of the SOFA Framework. The software allows the modeling of 1D objects such as needle, rod, cable or catheters using the linear discrete Cosserat theory. Using a reduced coordinate formulation, the model allows geometrically-exact modeling while facilitating simulations, with complex scenarios, in real time.
- Secondly, the listed previous work, was validated by the publication of a scientific article in an international newspaper.
In addition, new important features have been added to the software recently. Indeed, we have introduced the possibility of taking into account the plastic behavior of certain objects we use in our different simulations. A nonlinear model of the previous described model is currently under evaluation.
Participants: Alexandre Bilger, Damien Marchal, Christian Duriez.
-
ADT Plan IA: The simulation of soft-robots is a growing field since it is a way to virtually train AI algorithms in taking decisions. To tackle this challenge, accurate modeling the interactions of the robots with their environment is key. This is already possible today, but at the cost of a (too) long calculation time or a significant simplification of the environment. A ADT started this year to modernize the matrix assembly in SOFA and to bring the solving algorithms up to standard. Results of this work are already visible in the latest SOFA release (v21.12) and its advances can be followed on the associated GitHub project.
Participants: Christian Duriez, Damien Marchal, Gang Zheng.
- ANR Equipex+ TIRREX: TIRREX project aims to develop new emblematic platforms in robotics with a national coordination for their access and development. The project brings together all the major players in French academic research in robotics (CNRS, INRIA, CEA, INRAE) with 19 partners. It is structured around 6 thematic axes: Humanoid Robotics, XXL Robotics, Micro-Nano Robotics, Autonomous Terrestrial Robotics, Aerial Robotics and Medical Robotics, and transversal axes: Prototyping & Design, Manipulation, and open Infrastructure. Christian Duriez is co-responsible of the axis open Infrastructure, in particular for the development of digital twins.
10.4 Regional initiatives
- StartAIRR: Soft cobotic for pick and place applications. This is a short project, supported by the Hauts-de-France region (through StartAIRR call), starting from the 1st of April 2021 and ending the 31th of July 2022. The objective of this project is the creation of a prototype of a cobotic robot for pick and place tasks in the food-processing industry, for instance in production lines under severe spatial constraints that require the transportation of objects from one process line to another.
11 Dissemination
11.1 Promoting scientific activities
11.1.1 Scientific events: organisation
- Stefan Escaida Navarro was a co-organizer of the Workshop on Proximity Perception in Robotics at the robotics conference IROS 2021. This was the 4th edition of the workshop, which Stefan has helped organizing throughout his postdoctoral phase.
Member of the conference program committees
- Gang Zheng is IPC member of IWROV21, ICSRT21, ETFA21, ACMR21, APCRAS21.
- Jérémie Dequidt was PC member for International Symposium on Visual Computing (ISVC'21) and JFIG 2021
- Christian Duriez was meta-reviewer for ICRA 2021, Robosoft 2021 and IROS 2021, and co-chair of a session at IROS 2021
Reviewer
- Olivier Goury was reviewer for:
- 2021 IEEE International Conference on Robotics and Automation (ICRA)
- SIGGRAPH 2021
- Christian Duriez was reviewer for ICRA 2021.
11.1.2 Journal
Member of the editorial boards
- Gang Zheng is associate editor of IET Cyber-Systems and Robotics.
- Christian Duriez is associate editor for IEEE Robotics and Automation Letters
Reviewer - reviewing activities
- Jérémie Dequidt was reviewer for:
- IEEE Transactions on Visualization and Computer Graphics
- IEEE Robotics and Automation Magazine
- Haptics Symposium 2022
- IEEE Robotics and Automation Letters
- Olivier Goury was reviewer for:
- IEEE Transactions on Robotics (T-RO)
- IEEE Robotics and Automation Letters
- Thor Enrique Morales Bieze was reviewer for:
- Transactions on Haptics
- IEEE Transactions on Robotics (T-RO)
- International Journal of Robotics Research
- Yinoussa Adagolodjo was reviewer for:
- Mathematical and Computer Modelling of Dynamical Systems
- Computer Assisted Surgery
- IEEE Transactions on Robotics (T-RO)
- International Journal of Robotics Research
- Christain Duriez was reviewer for:
- Frontiers in Robotics
11.1.3 Invited talks
- C. Duriez: Workshop RoMaDo-RA at IROS 2021
- C. Duriez : Workshop New Approaches in Soft Robots Modeling and Control at IROS 2021
- C. Duriez: Workshop on Deformable Object Simulation in Robotics RSS 2021
- C. Duriez: Workshop Challenging Current Paradigms in Soft Robotics IEEE RoboSoft 2021
- C. Duriez: Workshop Advancements in Soft Interventional Robotics: What's new since STIFF-FLOP? IEEE RoboSoft 2021
11.1.4 Scientific expertise
- Jérémie Dequidt was member of an evaluation committee for french research agency (ANR CE33 Robotique et Interaction)
- Christian Duriez is reviewer for the monitoring of the European project HybridHeart
11.1.5 Research administration
- Gang Zheng is member of Ecole Doctorale MADIS in the domain of AGITSI
- Gang Zheng is member of the scientific bureau of Inria Lille – Nord Europe
11.2 Teaching - Supervision - Juries
11.2.1 Teaching
Teaching administration
- Jérémie Dequidt is the head of the Embedded Systems Department at Polytech Lille
- Alexandre Kruszewski is in charge of the Embedded and Cyberphysical system major of Centrale Lille. He is also in charge of the coordination of the ‘automatic control' part of the EEA department of Centrale Lille Institute.
Teaching activities
- Engineering cycle: Walid Amehri, Start & Go Arts et Sciences, 24h, level L3, Centrale Lille.
- Engineering cycle: Walid Amehri, Start & Go Conception et Environement, 10h, level L3, Centrale Lille.
- Engineering cycle: Walid Amehri, Automatique IE3, 20h, level L3, Centrale Lille.
- Engineering cycle: Alexandre Kruszewski, 14 modules (automatic control, numeric control, embeded systems, robotics etc.), 250h, level (L3, M1, M2), Centrale Lille
- Engineering cycle: Jeremie Dequidt 6 modules (Programming, Software Engineering, Embedded Systems, Databases, Medical Simulation etc.) 350h, level (L3, M1, M2), Polytech Lille
- Master: Christian Duriez, Soft robotics, 24h, M2, Graduate degree en intelligence artificielle à l'Ecole Polytechnique (Palaiseau)
- Engineering cycle: Yinoussa Adagolodjo 2 modules (C++ Programming, Medical Simulation) 24h, level ( M2), Polytech Lille
- Engineering cycle: Etienne Ménager, Programming Software Engineering, 64h, level (L3,M1) , Polytech Lille
11.2.2 Supervision
- PhD in progress: Walid Amehri, Workspace analysis of soft robots, G. Zheng and A. Kruszewski
- PhD in progress: Ke Wu, Control of soft robot under constraints, G. Zheng
- PhD in progress: Lingxiao Xun, Modeling and control of ionic polymers, A. Kruszewski and G. Zheng
- PhD in progress: Haihong Li, Modeling and control of soft robot via Cosserat theory, G. Zheng
- PhD in progress: Yiru Guo , Design and analysis of flexible mechanisms, G. Zheng and Andrey Polyakov
- PhD in progress: Félix Vanneste, Design and simulation of Soft Robots made of mesostructured materials, since December 2018, C. Duriez and O. Goury
- PhD in progress: Tanguy Navez, Embodied Intelligence and Mechanical modelling of soft robots using AI, since September 2021, C. Duriez and O. Goury
- PhD in progress: Etienne Ménager, Artificial Intelligence for High Level Control, since September 2020, C. Duriez
11.2.3 Juries
- Gang Zheng has participated the jury of thesis: Francois Hélénon, ENSAM Lille, (Reviewer)
- Christian Duriez has participated the jury of thesis: Camille Apamon, Caractérisation et commande des efforts impliqués dans la manipulation robotisée de guides et cathéters pour le traitement de maladies cardio-vasculaires, November 2021 (Reviewer)
- Christian Duriez has participated the jury of thesis: Benjamin Fasquelle, Étude théorique et expérimentale d’architectures innovantes de ro- bots inspirées du cou des oiseaux : conception et commande, Ecole Centrale de Nantes, December 2021 (Examiner)
- Christian Duriez has participated the jury of thesis: Julius Bernth Design, Modelling and Preclinical Evaluation of a Highly Flexible Robotic Colonoscope, King's College, June 2021 (Reviewer)
- Christian Duriez has participated the jury of thesis: Wanda Zhao, Design of Robot End-Effector for Collaborative Robot Works, Ecole Centrale de Nantes, December 2021 (Président)
11.3 Popularization
11.3.1 Internal or external Inria responsibilities
Olivier GOURY was member of the jury for the selection of Chargé de recherche (Young research Scientist) and ISFP (Inria Starting Faculty Position) at Inria Lille Nord Europe in 2021.
11.3.2 Articles and contents
The magazine 01Net did a portrait of Christian Duriez: L'homme qui désarticule les robots
11.3.3 Interventions
On November 25th, 2021, Dewi Brunet, artist in residence in the DEFROST Lab, presented his exhibition "Embryon" at the Espace Culture in the Unversité de Lille. This exhibition will remain several months through 2022, and displays preliminary work link to the collaboration with the DEFROST team in Oribotics.
On December 8th, the event Portfolio #2 : Les simulacres du vivant took place at La Gaîté Lyrique in Paris. From the team, Christian Duriez and Stefan Escaida Navarro were invited to discuss with artists Jonathan Pêpe and Yosra Mojtahedi about the implications and impact of soft robotics technologies that imitate organic life. Both artists have created installations in collaboration with DEFROST in 2015 and 2020, respectively.
From the 25th to the 27th of November 2021, six members of the team (Alexandre Bilger, Yinoussa Adagolodjo, Tanguy Navez, Nina Tenenhaus, Paul Chaillou, Etienne Ménager) participated in the second edition of the HackATech in Lille. This event consists in helping a project leader to develop a startup based on an INRIA Technology. The project in soft-robotics consisted in developing a flexible robot that can perform dental operations, such as drilling for implant placement. The team modeled and simulated a technical solution to this problem, provided technical and organizational knowledge for the realization of a business plan and a pitch. Etienne Ménager was the technical referent for this event.
12 Scientific production
12.1 Major publications
- 1 articleSoftware toolkit for modeling, simulation and control of soft robots.Advanced Robotics31November 2017, 1208-1224
- 2 inproceedingsControl of Elastic Soft Robots based on Real-Time Finite Element Method.ICRA 2013 IEEE International Conference on Robotics and AutomationKarlsruhe, France2013
- 4 articleFast, generic and reliable control and simulation of soft robots using model order reduction.IEEE Transactions on Robotics3462018, 1565 - 1576
- 5 articleDesign, implementation and control of a deformable manipulator robot based on a compliant spine.The International Journal of Robotics ResearchMay 2020
- 6 articleControl Design for Soft Robots based on Reduced Order Model.IEEE Robotics and Automation Letters41January 2019, 25-32
- 7 articleAnisotropic soft robots based on 3D printed meso-structured materials: design, modeling by homogenization and simulation.IEEE Robotics and Automation Letters52January 2020, 2380-2386
- 8 articleFEM-based Gain-Scheduling Control of a Soft Trunk Robot.IEEE Robotics and Automation Letters2021
12.2 Publications of the year
International journals
International peer-reviewed conferences
Conferences without proceedings
Scientific books
Reports & preprints
Other scientific publications