
Keywords
Computer Science and Digital Science
- A2.3.3. Real-time systems
- A3.1.1. Modeling, representation
- A5.5. Computer graphics
- A5.6. Virtual reality, augmented reality
- A5.10. Robotics
- A6.2.1. Numerical analysis of PDE and ODE
- A6.2.6. Optimization
- A6.4.3. Observability and Controlability
- A6.4.4. Stability and Stabilization
- A9.2. Machine learning
- A9.5. Robotics
Other Research Topics and Application Domains
- B2.5.1. Sensorimotor disabilities
- B2.5.3. Assistance for elderly
- B2.7. Medical devices
- B3.1. Sustainable development
- B5.1. Factory of the future
- B5.2. Design and manufacturing
- B5.5. Materials
- B5.6. Robotic systems
- B5.7. 3D printing
- B9.2. Art
1 Team members, visitors, external collaborators
Research Scientists
- Christian Duriez [Team leader, INRIA, Senior Researcher, HDR]
- Quentin Peyron [INRIA, Researcher]
- Gang Zheng [INRIA, Researcher, HDR]
Faculty Members
- Yinoussa Adagolodjo [UNIV LILLE, Associate Professor, from Sep 2022, Engineer in the team until August before moving to the position of assistant professor. ]
- Jérémie Dequidt [UNIV LILLE, Associate Professor]
- Alexandre Kruszewski [CENTRALE LILLE, Associate Professor, HDR]
Post-Doctoral Fellow
- Camille Krewcun [INRIA]
PhD Students
- Paul Chaillou [INRIA]
- Yiru Guo [CSC]
- Haihong Li [CSC]
- Etienne Menager [INRIA]
- Tanguy Navez [UNIV LILLE]
- Azouaou Ouyoucef [INRIA, from Oct 2022]
- Flavie Przybylski [CARANX MEDICAL, CIFRE]
- Ke Wu [INRIA]
- Lingxiao Xun [INRIA]
Technical Staff
- Alexandre Bilger [INRIA, Engineer]
- Eulalie Coevoet [INRIA, Engineer, from Apr 2022 until Aug 2022]
- Damien Marchal [CNRS, Engineer]
- Thor Morales-Bieze [INRIA, Engineer, until Aug 2022]
Interns and Apprentices
- Antoine Alessandrini [INRIA, from Feb 2022 until Aug 2022]
- Thomas Deffontaines [INRIA, from Feb 2022 until Aug 2022]
- Stephane Despierres [INRIA, from Mar 2022 until Sep 2022]
- Baptiste Gouabau [INRIA, Intern, from Jul 2022]
Administrative Assistant
- Anne Rejl [INRIA]
2 Overall objectives
The team DEFROST aims to address the open problem of control and modelling methods for deformable robots by answering the following challenges:
- Providing numerical methods and software support to reach the real-time constraint needed by robotic systems: the numerical solutions for the differential equations governing the deformation generate tens of thousands degrees of freedom, which is three orders of magnitude of what is frequently considered in classical methods of robotic modelling and control.
- Integrating deformation models in the control methods of soft robot: In soft-robotics, sensing, actuation and motion are coupled by the deformations. Deformable models must be placed at the heart of the control algorithm design.
- Investigating predictable interaction models with soft-tissues and parameter estimation by visual feedback from medical imaging: on the contrary too many cases in surgical robotics, the contact of the soft robot with the anatomy is permitted and it creates additional deformations on the robot.
3 Research program
3.1 Introduction
Our research crosses different disciplines: numerical mechanics, control design, robotics, optimisation methods and clinical applications. Our organisation aims at facilitating the team work and cross-fertilisation of research results in the group. We have three objectives (1, 2 and 3) that correspond to the main scientific challenges. In addition, we have two transverse objectives that are also highly challenging: the development of a high-performance software support for the project (Objective 4) and the validation tools and protocols for the models and methods (Objective 5).
3.2 Objective 1: Accurate model of soft robot deformation computed in finite time
The objective is to find concrete numerical solutions to the challenge of modeling soft robots with strong real-time constraints. To solve continuum mechanics equations, we will start our research with real-time Finite Element Method (FEM) or equivalent methods that were developed for soft-tissue simulation. We will extend the functionalities to account for the needs of a soft-robotic system:
- Coupling with other physical phenomenons that govern the activity of sensors and actuators (hydraulic, pneumatic, electro-active polymers, shape-memory alloys, etc.).
- Fulfilling the new computational time constraints (harder than surgical simulations for training) and find a better tradeoff between cost and precision of numerical solvers using reduced-order modeling techniques with error control.
- Exploring interactive and semi-automatic optimisation methods for design based on obtained solutions for fast computations on soft robot models.
3.3 Objective 2: Model based control of soft robot behavior
The focus of this objective is on obtaining a generic methodology for soft robot feedback control. Several steps are needed to design a model based control using FEM approach:
- The fundamental question of the kinematic link between actuators, sensors, effectors and contacts using the most reduced mathematical space must be carefully addressed. We need to find efficient algorithms for real-time projection of non-linear FEM models in order to pose the control problem using the only relevant parameters of the motion control.
- Intuitive remote control is obtained when the user directly controls the effector motion. To add this functionality, we need to obtain real-time inverse models of the soft robots by optimisation. Several criteria will be combined in this optimisation: effector motion control, structural stiffness of the robot, reduce the intensity of the contact with the environment, etc.
- Investigating closed-loop approaches using sensor feedback: as sensors cannot monitor all points of the deformable structure, the information provided will only be partial. We will need additional algorithms based on the FEM model to obtain the best possible treatment of the information. The final objective of these models and algorithms is to have robust and efficient feedback control strategies for soft robots. One of the main challenges here is to ensure / prove stability in closed-loop.
3.4 Objective 3: Modeling interaction with a complex environment
Even if the inherent mechanical compliance of soft robots makes them safer, more robust and particularly adapted to interaction with fragile environments, the contact forces need to be controlled by:
- Setting up real-time modeling and the control methods needed to pilot the forces that the robot imposes on its environment and to control the robot deformations imposed by its environment. Note that if an operative task requires to apply forces on the surrounding structures, the robot must be anchored to other structures or structurally rigidified.
- Providing mechanics models of the environment that include the uncertainties on the geometry and on the mechanical properties, and are capable of being readjusted in real-time.
- Using the visual feedback of the robot behavior to adapt dynamically the models. The observation provided in the image coupled with an inverse accurate model of the robot could transform the soft robot into sensors: as the robot deforms with the contact of the surroundings, we could retrieve some missing parameters of the environment by a smart monitoring of the robot deformations.
3.5 Objective 4: Soft Robotics Software
Expected research results of this project are numerical methods and algorithms that require high-performance computing and suitability with robotic applications. There is no existing software support for such development. We propose to develop our own software, in a suite split into three applications:
- The first one will facilitate the design of deformable robots by an easy passage from Computer-Aided Design (CAD) software (for the design of the robot) to the FEM based simulation.
- The second one is an anticipative clinical simulator. The aim is to co-design the robotic assistance with the physicians, thanks to a realistic simulation of the procedure or the robotic assistance. This will facilitate the work of reflection on new clinical approaches prior any manufacturing.
- The third one is the control design software. It will provide real-time solutions for soft robot control developed in the project.
3.6 Objective 5: Validation and application demonstrations
The implementation of experimental validation is a key challenge for the project. On one side, we need to validate the model and control algorithms using concrete test case examples in order to improve the modeling and to demonstrate the concrete feasibility of our methods. On the other side, concrete applications will also feed the reflections on the objectives of the scientific program.
We will build our own experimental soft robots for the validation of objectives 2 and 3 when there is no existing “turn-key” solution. Designing and making our own soft robots, even if only for validation, will help the setting-up of adequate models.
For the validation of Objective 4, we will develop “anatomical soft robot”: soft robot with the shape of organs, equipped with sensors (to measure the contact forces) and actuators (to be able to stiffen the walls and recreate natural motion of soft-tissues). We will progressively increase the level of realism of this novel validation set-up to come closer to the anatomical properties.
4 Application domains
4.1 Industry
Robotics in the manufacturing industry is already widespread and is one of the strategies put in place to maintain the level of competitiveness of companies based in France and to avoid relocation to cheap labor countries. Yet, in France, it is considered that the level of robotization is insufficient, compared to Germany for instance. One of the challenges is the high investment cost for the acquisition of robotic arms. In recent years, this challenge has led to the development of “generic” and “flexible” (but rigid) robotic solutions that can be mass produced. But their applicability to specific tasks is still challenging or too costly. With the development of 3D printing, we can imagine the development of a complete opposite strategy: a “task-specific” design of robots. Given a task that needs to be performed by a deformable robot, we could optimize its shape and its structure to create the set of desired motions. A second important aspect is the reduction of the manufacturing cost: it is often predicted that the cost of deformable robots will be low compared to classical rigid robots. The robot could be built on one piece using rapid prototyping or 3D printers and be more adapted for collaborative work with operators. In this area, using soft materials is particularly convenient as they provide a mass/carried load ratio several orders of magnitude higher than traditional robots, highly decreasing the kinetic energy thus increasing the motion speed allowed in the presence of humans. Moreover, the technology allows more efficient and ergonomic wearable robotic devices, opening the option for exo-skeletons to be used by human operators inside the factories and distribution centers. This remains to be put in place, but it can open new perspectives in robotic applications. A last remarkable property of soft robots is their adaptability to fragile or tortuous environments. For some particular industry fields (chemistry, food industry, etc.) this could also be an advantage compared to existing rigid solutions. For instance, the German company festo, key player in the industrial robotics field, is experimenting with deformable trunk robots that exhibit great compliance and adaptability, and we are working on their accurate control.
4.2 Personal and service robotics
Personal and service robotics are considered an important source of economic expansion in the coming years. The potential applications are numerous and in particular include the challenge of finding robotic solutions for active and healthy aging at home. We plan to develop functional orthosis for which it is better not to have a rigid exoskeleton that is particularly uncomfortable. These orthosis will be ideally personalized for each patient and built using rapid prototyping. On this topic, the place of our team will be to provide algorithms for controlling the robots. We will find some partners to build these robots that would fall in the category of “wearable robots”. With this thematic we also connect with a strong pole of excellence of the region on intelligent textiles (see Up-Tex) and with the strategic plan of INRIA (Improving Rehabilitation and Autonomy).
4.3 Entertainment industry and arts
Robots have a long history with entertainment and arts where animatronics have been used for decades for cinematographic shootings, theater, amusement parks (Disney's audio-animatronic) and performing arts. This year, we obtained an award for an Art Installation at the Exhibit Panorama 22. The installation “L'Érosarbénus”, which was produced at Le Fresnoy for the exhibition Panorama 22, is a collaboration between visual artist Yosra Mojtahedi and DEFROST. This installation, whose aesthetics are inspired by rocky, plant and human forms, is brought to life with the help of Soft Robotics devices. It was awarded the prize “Révélation Art Numérique — Art Vidéo 2020” by the ADAGP. See the ARTE video.
4.4 Medical Applications
Soft robots have many medical applications as their natural compliance make them safer than traditional robots when interacting with humans. Such robots can be used for minimally invasive surgery, to access and act on remote parts of the body through minimal incisions in the patient. Applications include laparascopic and brain surgery, treatment of several cancers including prostate cancer, and cardiology, for example percutaneous coronary interventions. As an example, we received an industry grant (CIFRE) with Robocath to work on autonomous catheter navigation. See Section 9.1.
Another application is cochlear implant surgery in the project ANR ROBOCOP.
5 Social and environmental responsibility
The team fully endorses the needs for an increased integration of social and environmental responsibility and seeks to align with the 17 Sustainable Development Goals laid out by the United Nations. The team also acknowledges the Net Zero target of the 2050 Paris agreement and is working either on its practices as well as on its scientific objectives to align with the 2030's intermediate GhG emission roadmap.
In terms of social responsibility, the team wants to point out that environmental concerns were mentioned by postdocs, graduated PhD students and visiting master students regarding theirs willingness to make or not a scientific career. This increased expression is something we should pay attention to and for which building a shared vision and clear actions and message is important not only for the team but also for our scientific community and more generally INRIA.
This is why, in addition to the best practices recommended by INRIA, the team supports the actions put in place either by other teams individuals or collectives as the "Ma Petite Planète" challenge organized by the Staff Organization (AGOS).
5.1 Footprints of research activities
The CRIStAL laboratory and the University of Lille account for their GHG emissions. The CRIStAL accounting is done by Damien Marchal, member of DEFROST. This gives us an overview of our current footprint, which is probably quite common for a research and technology oriented team. Travel, commuting, office occupancy, hardware equipment and operation are the most significant elements of our footprint. The results were presented and discussed during one of our team meeting. In the following are presented our activities for the elements where clear direction and actions have been taken.
5.1.1 Traveling
In terms of traveling, we are following the Inria general travel policy. We are also adopting a frontrunner approach and encourage team members to adopt the more ambitious flyless guide produced by the Inria MakeSenS initiative.
Currently we:
- favor visio-conferencing whenever possible and beneficial,
- choose alternative modes of transportation to flying. Our analysis shows that destination reachable by a train travel bellow 8h allows to reach maximum efficiency in GES emission reduction while still being manageable if the alternative is comfortable high-speed train.
- strategically select the workshop and conferences location we attend to reach the best scientific impact, scientific community building while reducing the transportation footprint.
5.1.2 Daily commuting
With other laboratories from the University of Lille, the team is actively promoting for more sustainable commuting practices and is participating to local initiatives or national ones like being part of the Inria AGOS's team at the national challenge MaiAVélo. In addition, Damien Marchal, member of the team is co-animator of the mobility workgroup for University of Lille. His activities include support for the statistical analysis of the 2022 update of the University of Lille commuting practices and commuting plans. Finally we also make sure that the team members are informed of the transportation allowances at Inria and favoring sustainability among which the "Forfait Mobilité Durable" and the public transportation allowance.
5.1.3 Sharing objectives externally
The team, not only encourages its members to adhere to the highest practice standard but also to adopt a frontrunner position. This includes sharing our objectives and ambitions with peers and research community (eg: having one slide related to footprint in the team presentations slides). In 2022, Damien Marchal and Quentin Peyron were involved in the organization for a round table for the professional network 2RM's day: "Les roboticiens à l'heure des défis écologiques" ("roboticians at time of ecological challenge"). Quentin Peyron also participated to the workshop "Robotique et impact environnemental" organized by the group "Robotique et société" of the GDR Robotique.
5.2 Impact of research results
The team hopes to tackle ecology-oriented research problems related to soft robotics in the near future. In 2022, we began to set up the research environment to do so.
A new researcher, Quentin Peyron, has been hired which research plan focuses on the development of industrial soft robots with a low ecological footprint. The main concept is to leverage the inherent compliance of untransformed plant-based elements, such as wicker branches and bamboo stems, to fabricate soft manipulators with minimal energy consumption and CO2 emission. The research plan also includes the development of new physical architectures, models and control laws to minimize soft robot's energy consumption once online.
The team also applied and received a BQR grant from Centrale Lille (9500€) for the design and fabrication of a first prototype of eco-designed soft manipulator.
6 Highlights of the year
6.1 Award and summer-school
-
JRDA's award:
Paul Chaillou won the best poster prize during the JRDA (Journée Régionale des doctorants en automatique, in Douai) with his poster Soft robot design for in vivo cancer imaging.
-
Summer school on SoftRobotics:
In July 2022, we organized in Lille the first summer school on Deformation in Robotics (Def-Robotics2022). During one week, the 45 participants attended lectures and practical sessions on the fundamental concepts (modeling, simulation and control) needed to use deformable materials in soft robotics, continuous robotics, hybrid rigid/deformable robotics as well as rigid robotics interacting with a deformable environment. The lectures were given by renowned researchers from Inria, CNRS and Universities. With an international audience, the summer school was a success, with participants giving it a 4.6/5 rating.
6.2 Departures and recruitment of permanent researchers
For family reasons, Olivier Goury has left the team to join the Inria center in Grenoble. We have welcomed a new INRIA researcher: Quentin Peyron who arrived in January 2023. Yinoussa Adagolodjo, former post-doctoral fellow of the team, has become an Assistant Professor at the University of Lille and will therefore be a permanent member of the team. Alexandre Bilger has been selected as permanent research engineer (SED) for the Inria Center of Lille in December 2022. He is assigned to the team DEFROST.
6.3 New projects
The team has launched a startup project in the field of agri-food. In addition, a "Priority Program and Equipment for Exploratory Research" has been launched around the concept of "organic robotics" (PEPR O2R).
6.4 Management at Inria
We are worried that our INRIA institute is losing its efficiency due to management issues. Moreover, we notice that the people who work there (in particular the administrative staff, but also some researchers) are no longer fully serene about their working conditions.
7 New software and platforms
7.1 New software
7.1.1 SoftRobots
-
Name:
SoftRobots plugin for Sofa
-
Keywords:
Numerical simulations, Problem inverse, Soft robotics
-
Functional Description:
This plugin allows the modeling of deformable robots in the Sofa platform. It allows the modeling of different actuators, such as cable, pneumatic pressure, hydraulics and other simpler types of actuation. It also contains useful tools for animation design or communication with the robot. Coupled with the SoftRobots.Inverse plugin, it also allows the control of these robots. More information can be found on the dedicated website.
- URL:
-
Contact:
Christian Duriez
-
Participants:
Christian Duriez, Olivier Goury, Jérémie Dequidt, Damien Marchal, Eulalie Coevoet, Felix Vanneste
7.1.2 Model Order Reduction Plugin for SOFA
-
Name:
Model Order Reduction Plugin for SOFA
-
Keywords:
Model Order Reduction, Sofa, Finite element modelling
-
Scientific Description:
This plugin allows speed-up of SOFA simulations by providing tools to create a reduced version of the SOFA simulation that runs at much higher rates but remains accurate. Starting with a snapshot of the object deformations on a high-dimensional Finite Element mesh, Proper Orthogonal Decomposition (POD) is used to compute a reduced basis of small dimension representing correctly all the possible deformations of the object. The original system describing the object motion is then greatly reduced. To keep numerical efficiency, a hyper-reduction method is used to speed-up the construction of the reduced system.
-
Functional Description:
This plugin allows to dramatically reduce computational time in mechanical simulation in the SOFA framework. A reduced simulation, of much smaller dimension but still accurate is created in an automatic way by the plugin. Building the reduced model may take time, but this operation is made once only. The user can then benefit from a reduced and interactive version of his/her simulation without significant loss of accuracy.
-
Release Contributions:
This is the first version of the plugin.
-
News of the Year:
Publication using this plugin accepted in IEEE Robotics and Automation Letters (RA-L)
- URL:
- Publication:
-
Contact:
Olivier Goury
-
Participants:
Olivier Goury, Felix Vanneste, Christian Duriez, Eulalie Coevoet
7.1.3 SoftRobots.Inverse
-
Name:
SoftRobots.Inverse
-
Keywords:
Sofa, SoftRobots
-
Scientific Description:
This plugin implements a method to compute the inverse model of a robot in its environment. The input of the method is the desired position of the effector. The output is the force or the motion that needs to be applied to the actuators in order to minimize the distance with the effector position. This is found by minimizing the constraint equation using Quadratic Programming (QP), i.e. minimizing the violation of the defined constraints.
-
Functional Description:
This plugin builds on the plugin SoftRobots. Inside the plugin, there are some constraint components that are used to describe the robot (effectors, actuators, sensors). An optimisation algorithm is provided to find the efforts to put on actuators in order to place the robot in the closest possible configuration to the one described by “effectors”, or to a state described by “sensors”. This method used to control the soft robots in the task space is patented.
- URL:
- Publication:
-
Contact:
Christian Duriez
-
Participants:
Christian Duriez, Eulalie Coevoet
-
Partners:
CNRS, Université de Lille, Ecole Centrale de Lille
7.1.4 SofaPython3
-
Name:
SofaPython3
-
Keywords:
Python, Numerical simulations, Sofa
-
Functional Description:
This plugin allows to use Sofa as a library from any python3 program. It also allows to write new mechanical component for a Sofa simulation in python3.
-
Release Contributions:
Python3 and SOFA are meeting in one plugin: SofaPython3. In 2020, the integration of this plugin within SOFA opens up new perspectives. Not only can a SOFA simulation be described using a Python script with the embedded Python interpreter, but one or several SOFA instances can now created from a Python environment. Even more powerful, you can create new components (e.g. forcefields) in Python using the bindings provided in the plugin. Python-scripted simulations have no limit anymore!
-
News of the Year:
Python3 and SOFA are meeting in one plugin: SofaPython3. In 2020, the integration of this plugin within SOFA opens up new perspectives. Not only can a SOFA simulation be described using a Python script with the embedded Python interpreter, but one or several SOFA instances can now created from a Python environment. Even more powerful, you can create new components (e.g. forcefields) in Python using the bindings provided in the plugin. Python-scripted simulations have no limit anymore!
- URL:
-
Contact:
Hugo Talbot
-
Participants:
Jean-Nicolas Brunet, Damien Marchal, Bruno Marques, Thierry Gaugry, Frédérick Roy, Guillaume Paran, Hugo Talbot
7.1.5 Cosserat plugin
-
Keywords:
Physical simulation, Finite element modelling, Soft robotics, Needle insertion, Frictional contact
-
Functional Description:
The Cosserat model has been introduced in continuum robotics to simulate the deformation of the robot body, whose geometry and mechanical characteristics are similar to a rod. This model can also be used to simulate needles, sutures, and wires. One key aspect of Cosserat's theory in the context of the mechanics of continuous media is that it considers the set of material points to be made up of rigid solids (3 translations, 3 rotations), while most other models in this field consider material points to be particles (3 translations). This allows for the modeling of linear structures using a framework similar to that of articulated solids, with a series of rigid solids whose relative position is defined by a strain state. The Cosserat model can be used to model and control concentric tube robots, continuum robots actuated with cables, and pneumatic soft robots with a constant cross-section. There are several approaches to modeling Cosserat rods. In this plugin, we have implemented the Piece-wise Constant Strain (PCS) model presented by Federico Renda et al. and the Dynamic Piece-wise Non-Constant Strain (DPCNS) model presented by Frédéric Boyer et al. in the SOFA framework.
- URL:
-
Authors:
Yinoussa Adagolodjo, Christian Duriez, Federico Renda
-
Contact:
Christian Duriez
7.1.6 SofaGym
-
Keywords:
Plugin SOFA, Reinforcement learning, SoftRobots
-
Functional Description:
Software toolkit to easily create an OpenAI Gym environment out of any SOFA scene. The toolkit provides an API based on the standard OpenAI Gym API, allowing to train classical Reinforcement Learning or Planning algorithms.The toolkit also comprises example scenes based on the SoftRobots plugin for SOFA to illustrate how to include SOFA simulations and train learning algorithms on them.
- URL:
-
Contact:
Etienne Menager
7.1.7 SofaGLFW
-
Name:
Simple GUI for SOFA, based on GLFW
-
Keywords:
GUI (Graphical User Interface), Plugin SOFA, Sofa
-
Functional Description:
Integration of GLFW is automatic (automatic fetching and integration with CMake), and linked statically.
This GUI is launchable with the standard runSofa, or can be used with a (provided) stand-alone executable runSofaGLFW (which needs much less dependencies than runSofa)
Lastly, this GUI was designed to support multiple windows in the same time and multiple simulations.
By default, SofaGLFW does not show any user interface. Only the keyboard allows limited interactions with the simulation. That is why a user interface based on Dear ImGui is provided.
Integration of Dear ImGui is automatic (automatic fetching and integration with CMake), and linked statically.
- URL:
-
Contact:
Alexandre Bilger
7.1.8 SofaCUDALinearSolver
-
Keywords:
Plugin SOFA, Sofa, GPU, CUDA, Linear Systems Solver
-
Functional Description:
A plugin for SOFA providing direct linear solver on GPU. The implementation is based on CUDA and the cuSolver library.
- URL:
-
Contact:
Alexandre Bilger
7.1.9 SofaGLFW
-
Name:
Simple GUI for SOFA, based on GLFW
-
Keywords:
GUI (Graphical User Interface), Plugin SOFA, Sofa
-
Functional Description:
Integration of GLFW is automatic (automatic fetching and integration with CMake), and linked statically.
This GUI is launchable with the standard runSofa, or can be used with a (provided) stand-alone executable runSofaGLFW (which needs much less dependencies than runSofa)
Lastly, this GUI was designed to support multiple windows in the same time and multiple simulations.
By default, SofaGLFW does not show any user interface. Only the keyboard allows limited interactions with the simulation. That is why a user interface based on Dear ImGui is provided.
Integration of Dear ImGui is automatic (automatic fetching and integration with CMake), and linked statically.
- URL:
-
Contact:
Alexandre Bilger
7.2 New platforms
7.2.1 Prostate Phantom
Participants: Stefan Escaida Navarro, Manuela Otti.
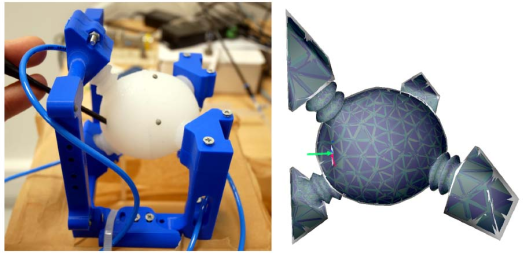
In the context of the Cooperative Brachytherapy (CoBra) project, a novel prostate phantom to study needle-insertion based interventions, such as LDR brachytherapy, was developed. This devices was conceived using soft robotics fabrication and modeling techniques previously researched within the team 46. In the corresponding paper 45, it is described how the phantom is equipped with sensors and coupled with the simulation in order to estimate external forces acting on the device. The deformation/motion of the phantom due to this forces is also captured and it was shown that they are plausible from a clinical point of view.
7.2.2 Trunk Robot
Participants: Ke Wu, Gang Zheng.
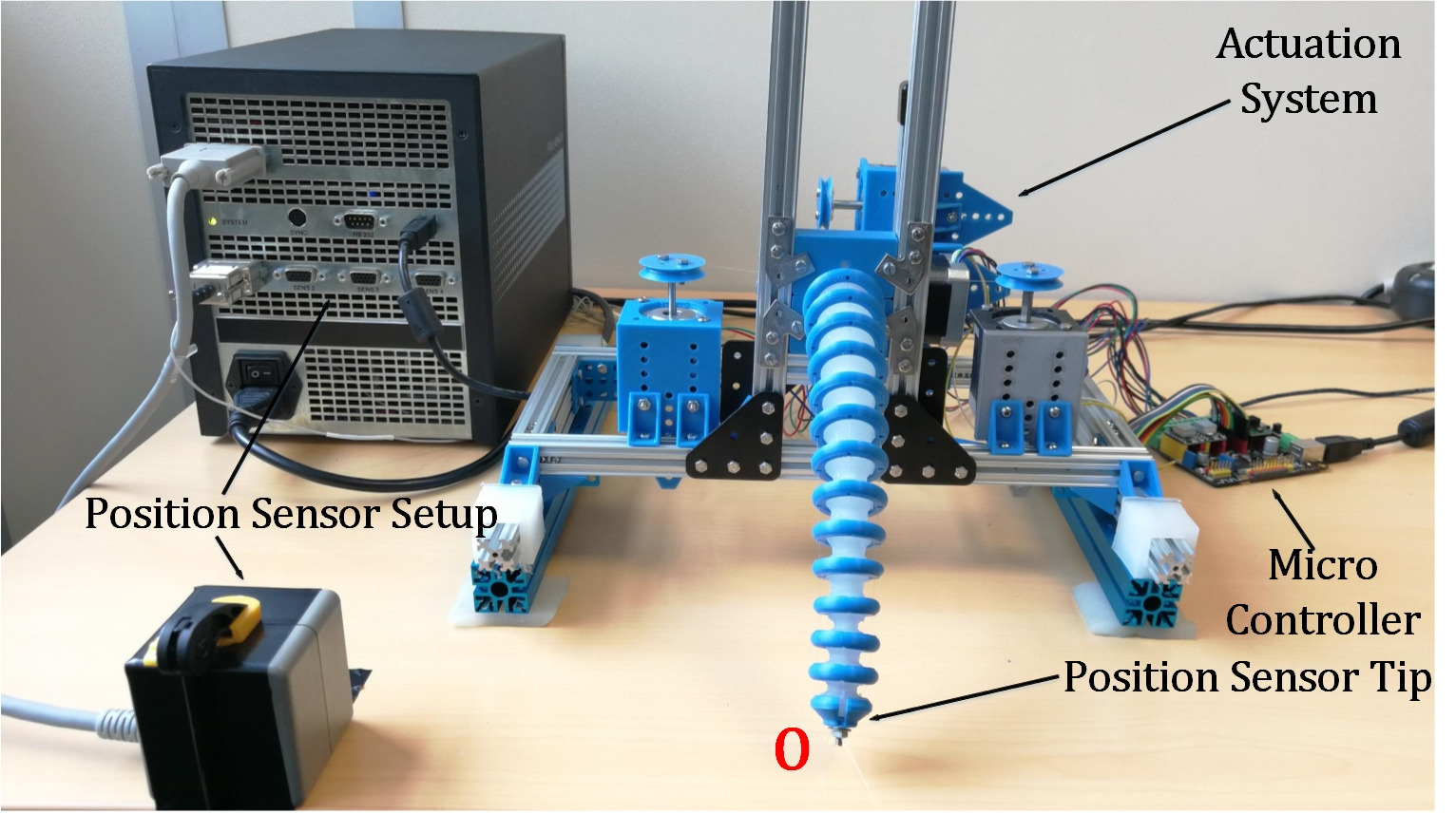
This platform is mainly composed of three parts: actuation system, micro controller, position sensor system. It is made of controlling cable-driven soft robots, such as the soft trunk robot shown in Fig. 2. Some research work has been completed on this platform: 4730
7.2.3 Mobile Trunk
Participants: Alexandre Kruszewski, Damien Marchal, Fabrice Dedo, Antoine Alessandrini.
In the context of the SOMOROB project, we are building a platform composed and 4 wheels differential mobile robot SummitXL combined with our Echelon deformable trunk.
7.2.4 Virtual Twins
Participants: Christian Duriez, Eulalie Coevoet, Damien Marchal, Fabrice Dedo, Gérald Dherbomez.
Within the nationwide TIRREX Equipex+, the DEFROST team is coordinating the setting up of a virtual desktop solutions to host virtual twins of the physical robotics platform. An experiment was conducted on such a service at the CRISTAL laboratory. The experiment was conclusive, and laboratory allocated a credit line for a deployment in 2023. In the meantime, members of the team have already made several virtual twins demonstrating the capabilities of our simulation framework. The twins are all using SOFA and SoftRobots plugin but are exposed as ROS node so they can be controller in a similar way as the real robots they are modeling.
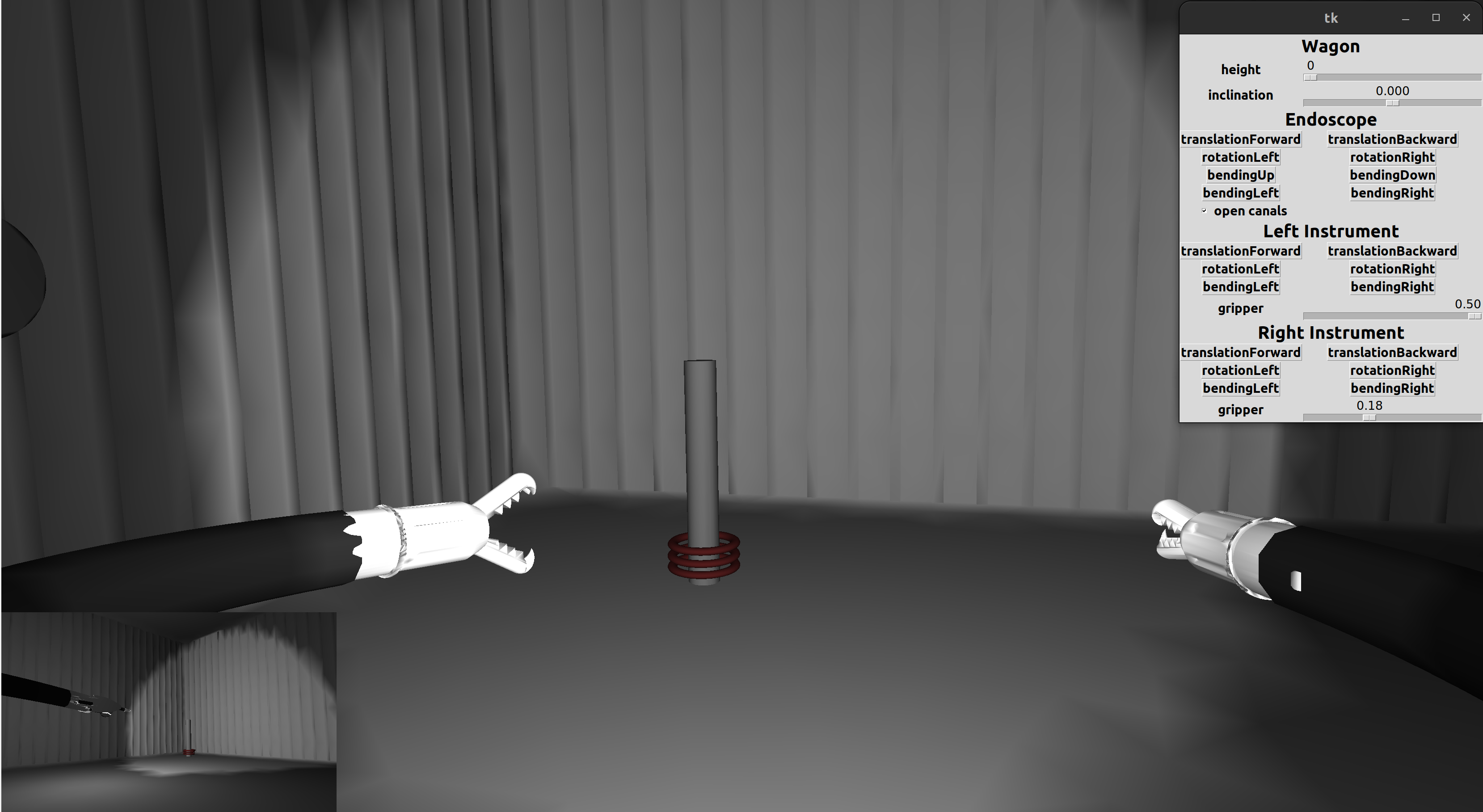
Endoscope twin
The system is a modular and motorized endoscopy platform consisting of two parts: the patient system and the remote manipulation console. The first part, the patient system, consists of a motorized flexible endoscope, and two motorized flexible surgical instruments, mounted on a mobile platform. The second part, the manipulator console, is a dedicated mobile console used to remotely manipulate the patient system. The main intended application is endoscopic dissection of the submucosa (ESD) in colorectal localization. The digital twin models the whole system using SOFA and the plugins BeamAdapter, SoftRobots, and SofaPython3. The twin is open-source and available at Endoscopy repository.
Caroca twin
The system is a large cable-driven parallel robot (CDPR). It is a six degrees of freedom suspended CDPR with eight cables. The current version of the digital twin is a work in progress, it only models a part of the system ; the cables and the coupling with the manipulated object. It uses SOFA and the plugins BeamAdapter, Cosserat and SofaPython3. The twin is open-source and available at Caroca repository.
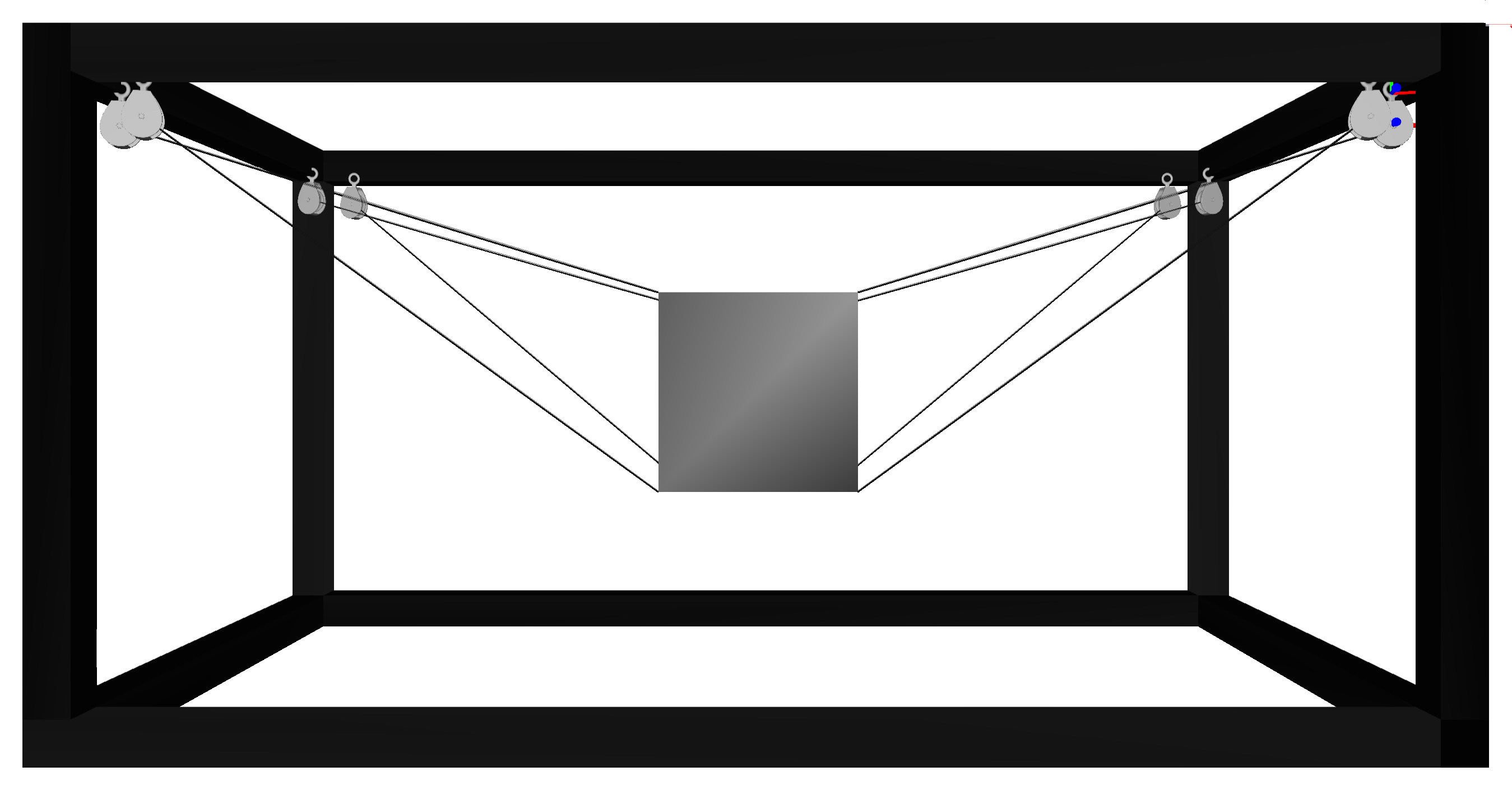
A large cable-driven parallel robot (CDPR) feature six degrees of freedom suspended CDPR with eight cables
Micro Parallel twin
The system is a small parallel continuum robot ; it is composed of four legs connected to a gripper. The digital twin models the whole system using SOFA and the plugins BeamAdapter, SoftRobots, and SofaPython3. The twin is open-source and available at MicroParallel repository.
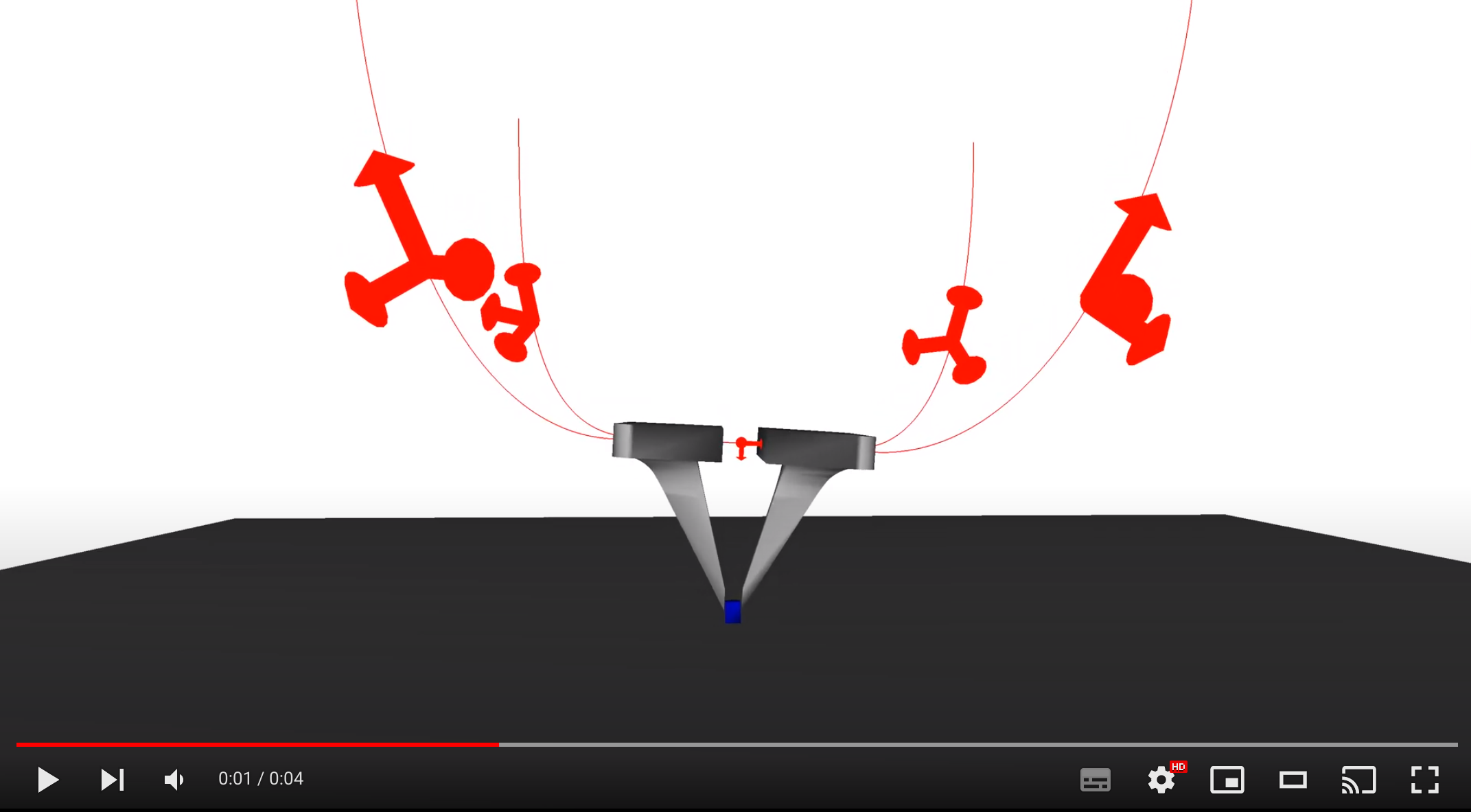
MobileTrunk twin
Within the SOMOROB project aforementioned we are fabricating an hardware plateform of a mobile robot with a deformable trunk. A virtual twin for this robot has been made in SOFA. The model of the 4 wheels differential mobile robot follows the same control as the physical one and the Echelon deformable trunk is controlled using SoftRobots.Inverse. The twin is open-source and available at MobileTrunk repository.
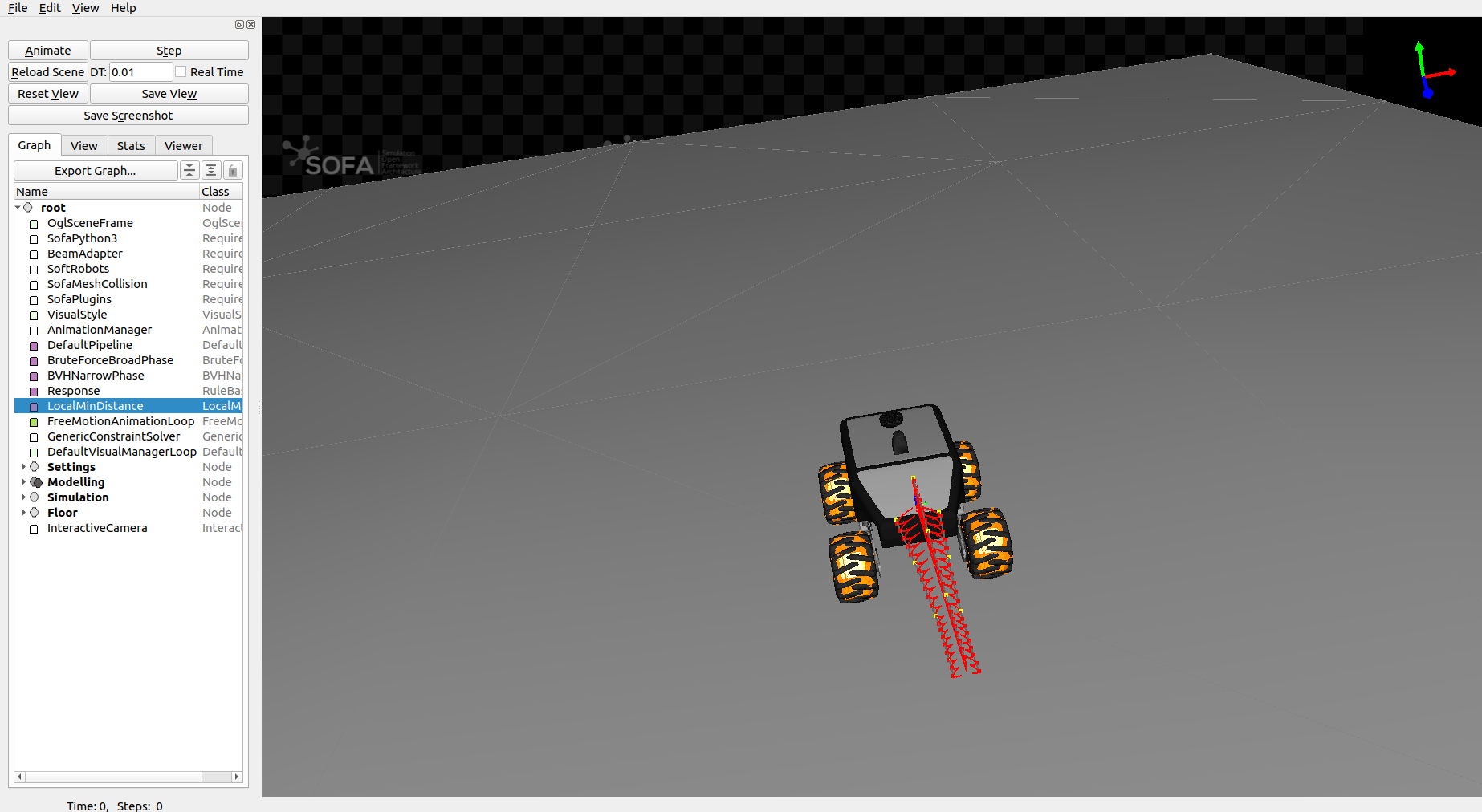
Image showing an interactive four wheel robots with a deformable trunk.
8 New results
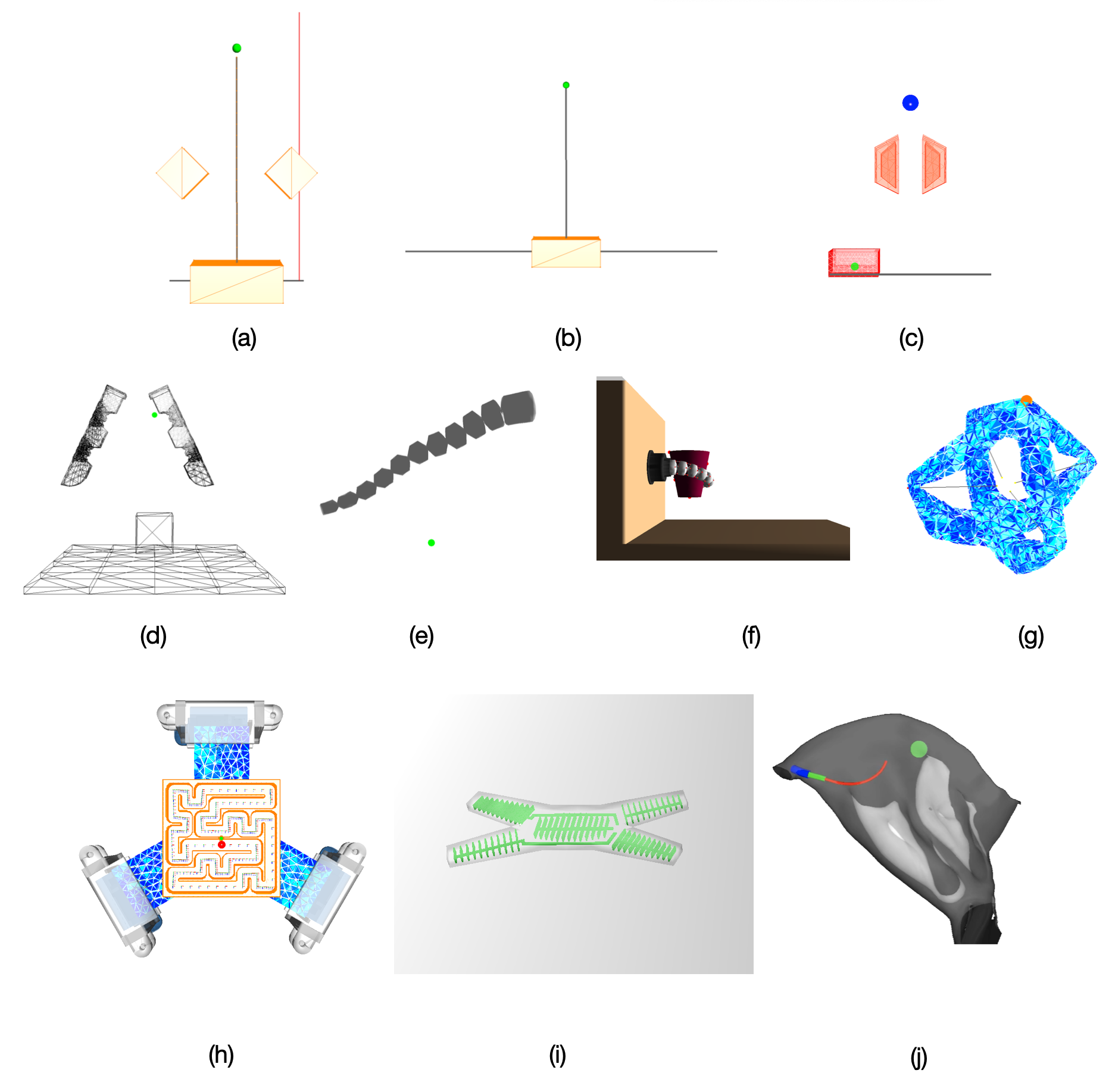
8.1 SofaGym: An open platform for Reinforcement Learning based on Soft Robot simulations
Participants: Etienne Ménager, Pierre Schegg, Elie Khairallah, Damien Marchal, Jérémie Dequidt, Philippe Preux, Christian Duriez.
OpenAI Gym is one of the standard interfaces used to train Reinforcement Learning (RL) Algorithms. The Simulation Open Framework Architecture (SOFA) is a physics based engine that is used for soft robotics simulation and control based on real-time models of deformation. The aim of this work 18 is to present SofaGym, an open source software to create OpenAI Gym interfaces, called environments, out of soft robot digital twins.The link between soft robotics and RL offers new challenges for both fields: representation of the soft robot in a RL context, complex interactions with the environment, use of specific mechanical tools to control soft robots, transfer of policies learned in simulation to the real world, etc. This work presents the large possible uses of SofaGym to tackle these challenges by using RL and planning algorithms. This work contains neither new algorithms nor new models but proposes a new platform, open to the community, that offers non existing possibilities of coupling RL to physics based simulation of soft robots. We present 11 environments (see Figure 7), representing a wide variety of soft robots and applications, we highlight the challenges showcased by each environment. We propose methods of solving the task using traditional control, RL and planning and point out research perspectives using the platform.
Various images showing simulation results.
8.2 Piecewise Linear Strain Cosserat Model for Soft Slender Manipulator
Participants: Haihong Li, Lingxiao Xun, Gang Zheng.
Recently soft robotics has rapidly become a novel and promising area of research with many designs and applications due to their flexible and compliant structure. However, it is more difficult to derive the nonlinear dynamic model of such soft robots. The differential kinematics and dynamics of the soft manipulator can be formulated as a set of highly nonlinear partial differential equations (PDEs) via the classic Cosserat rod theory. In this work, we propose a discrete modeling technique named piecewise linear strain (PLS) to solve the PDEs of Cosseratbased models, based on which the associated analytic models are deduced. To validate the accuracy of the proposed Cosserat model, the static model of the conical cantilever rod under gravity as a simple example is simulated by using different discretization methods. Results indicate that PLS Cosserat model is comparable to the mechanical deformation behavior of real-world soft manipulator. Finally, a parameters identification scheme for this model is established, and the simulation as well as experimental validation demonstrate that using this method can identify the model physical parameters with high accuracy (see the illustration in Figure 8).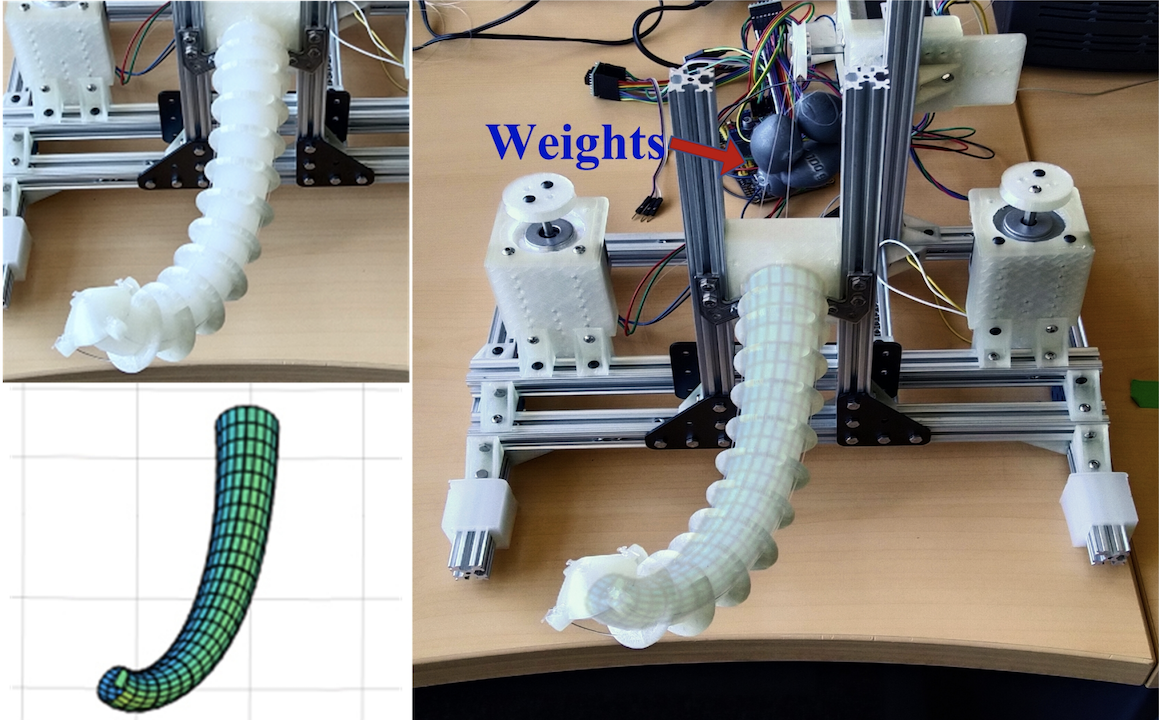
8.3 Modeling and Control of Conducting Polymer Actuator
Participants: Lingxiao Xun, Gang Zheng, Sofiane Ghenna, Alexandre Kruszewski, Éric Cattan, Christian Duriez, Sébastien Grondel.
Conducting polymer actuator has nonlinear dynamic characteristics during its charge process. In this study 31, we proposed an electromechanic model and an optimal controller for a type of ionic electroactive polymer (IEPA) actuator with sub-millimeter scale, which can produce large deformation under low actuation voltage. The electronic model is to describe the evolution of charge state in time domain. The mechanic model is to calculate the deformation of conducting polymer actuator under the actuation force and external force. Based on the electromechanic coupling model, a parameter identification method is proposed to estimate the nonlinear parameter of conducting polymer actuator. The experiments show that our electromechanic model successfully predicts the deformation of actuator under different input voltages with the identified parameters. In the last step, an optimal controller is designed to control the orientation of IEAP actuator, which achieves at a high control performance in our experiments. The success of the modeling and control lays the foundation work for the subsequent biomedical applications.
An image showing: Electric-mechanic coupling model for predicting deformation of the conducting polymer
8.4 Theoretical Analysis on Nonlinear Buckling, Post-Buckling of Slender Beams and Bi-Stable Mechanisms
Participants: Ke Wu, Gang Zheng.
Compliant mechanisms (CMs) are used to transfer motion, force, and energy, taking advantages of the elastic deformation of the involved compliant members. A branch of special type of elastic phenomenon called (post) buckling has been widely considered in CMs: avoiding buckling for better payload-bearing capacity and utilizing post-buckling to produce multistable states. This work digs into the essence of beam’s buckling and post-buckling behaviors where we start from the famous Euler–Bernoulli beam theory and then extend the mentioned linear theory into geometrically nonlinear one to handle multi-mode buckling problems via introducing the concept of bifurcation theory. Five representative beam buckling cases are studied in 29, followed by detailed theoretical investigations of their post-buckling behaviors where the multi-state property has been proved. We finally propose a novel type of bi-stable mechanisms termed as pre-buckled bi-stable mechanisms (PBMs) that integrate the features of both rigid and compliant mechanisms. The theoretical insights of PBMs are presented in detail. To the best of our knowledge, this work is the first study on the theoretical derivation of the kinematic models of PBMs, which could be an important contribution to this field.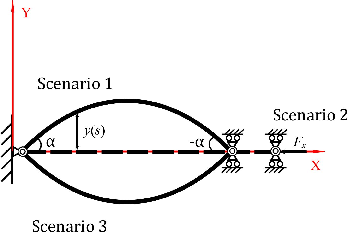
Image showing bi-stable mechanisms
8.5 Solutions to large beam-deflection problems by Taylor series and Padé approximant for compliant mechanisms
Participants: Ke Wu, Gang Zheng.
Compliant Mechanisms (CMs) serve as a promising alternative for transferring motion, force and energy compared to rigid mechanisms. The mentioned desired function is achieved by making the most of the elastic deflection of all built-in flexible members in CMs, such as slender straight beams and slender initially curved beams (ICBs). Therefore, accurately characterizing the deformation of these slender beams plays a considerable role in modeling CMs. As is wellknown in the field of CMs, static planar large deflection of slender beams can be modeled via Euler Bernoulli beam theory, and it is essentially a boundary value problem (BVP). In this work 28, we propose to use Taylor series method and Padé approximant to solve this BVP in a more efficient manner compared to the previous work. Its accuracy and efficiency have been compared with weighted residual method and also verified by solid-mechanics-based Finite Element Method (FEM) respectively. The feasibility of the proposed method has also been proved in terms of synthesizing CMs where three representative cases are studied.
Image showing large deflection of slender beams handled by Taylor series and Padé approximant
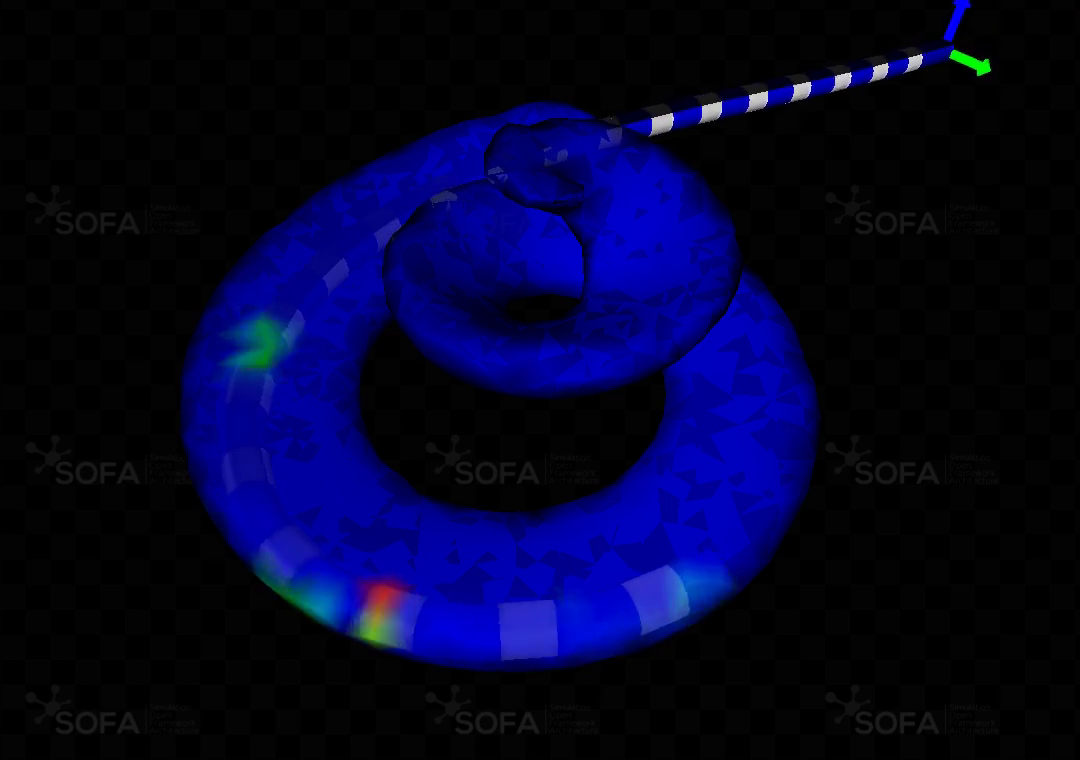
8.6 Constraint-based simulation of passive suction cups
Participants: Eulalie Coevoet, Christian Duriez.
In this contribution, we propose a physics-based model of suction phenomenon to achieve simulation of deformable objects like suction cups. Our model uses a constraint-based formulation to simulate the variations of pressure inside suction cups. The respective internal pressures are represented as pressure constraints which are coupled with anti-interpenetration and friction constraints. Furthermore, our method is able to detect multiple air cavities using information from collision detection. We solve the pressure constraints based on the ideal gas law while considering several cavity states.

Image showing a simulation of an octopus tentacle lifts a can using its suction cups.
8.7 Planning of soft-rigid hybrid arms in contact with compliant environment: application to the transrectal biopsy of the prostate
Participants: Eulalie Coevoet, Yinoussa Adagolodjo, Meichun Lin, Christian Duriez.
In this study, a rigid robot is hybridized with a soft part to improve its properties of relative positioning and safe interaction. While the design of the device is quite simple, the kinematics, on the other hand, becomes complex. Pre-operative planning of such a robot is a challenge that is faced in this paper 15. The clinical context is the automation of transrectal prostate biopsy: a robot is connected to a thin ultrasound (US) probe instrumented with a needle through a flexible silicone part. The procedure consists of: moving the probe near the prostate through the rectum, aligning the probe with identified lesions in the prostate, and shooting the needle to collect tissue samples. In this paper we demonstrate in simulation the feasibility of our methods to solve the planning of the entire procedure
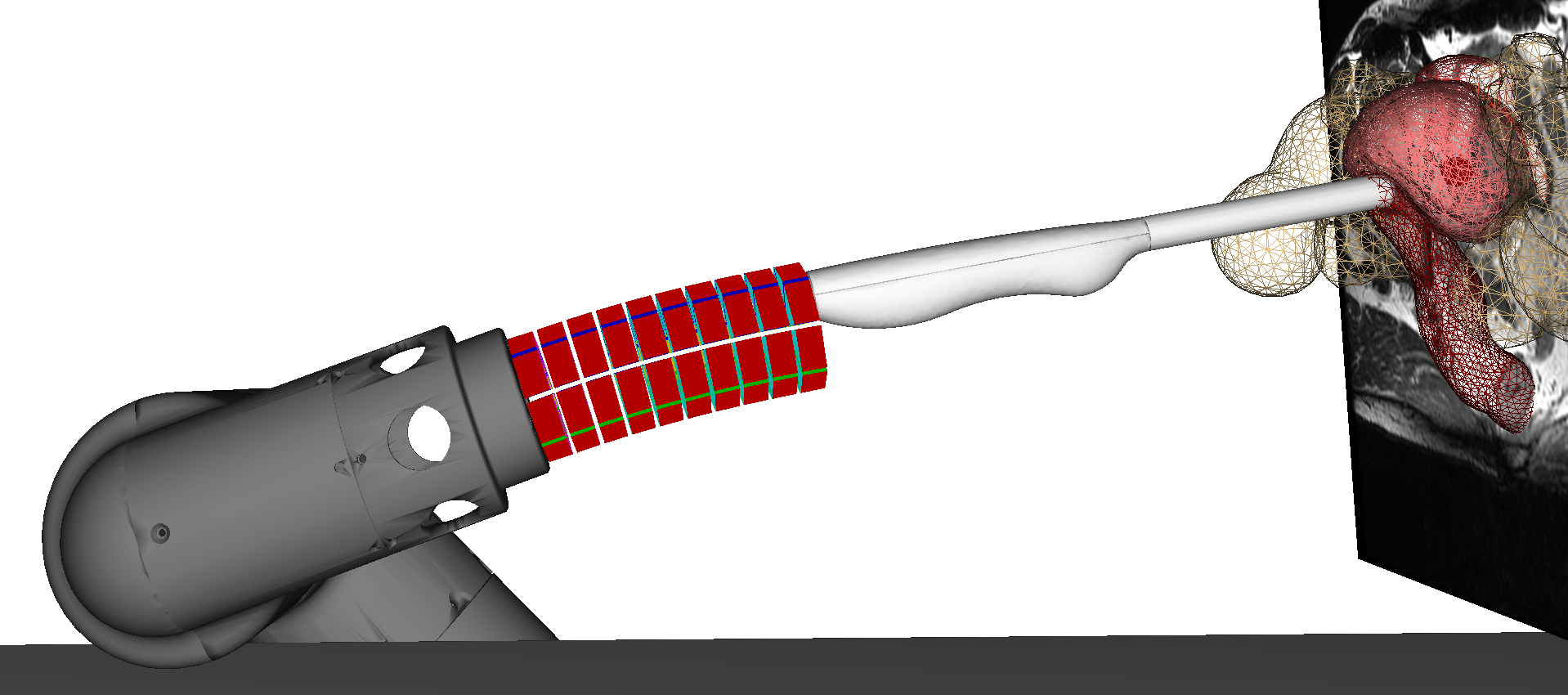
Image showing the simulation of on hybrid soft and rigid arm for prostate biopsy.
8.8 Automated Planning for Robotic Guidewire Navigation in the Coronary Arteries
Participants: Pierre Schegg, Jeremie Dequidt, Eulalie Coevoet, Christian Duriez.
Soft continuum robots, and comparable instruments allow to perform some surgical procedures non-invasively. While safer, less morbid and more cost-effective, these medical interventions increase the complexity for the practitioners: the manipulation of anatomical structures is indirect through telescopic and flexible devices and the visual feedback is indirect through monitors. Interventional cardiology is an example of complex procedures where catheters and guidewires are manipulated to reach and treat remote areas of the vascular network. Such interventions may be assisted with a robot that will operate the tools but the planning (choice of tools and trajectories) remains a complex task. In this paper we use a simulation framework for flexible devices inside the vasculature and we propose a method to automatically control these devices to reach specific locations. Experiments performed on 15 patient geometries exhibit good performance. Automatic manipulation reaches the goal in more than 90% of the cases.
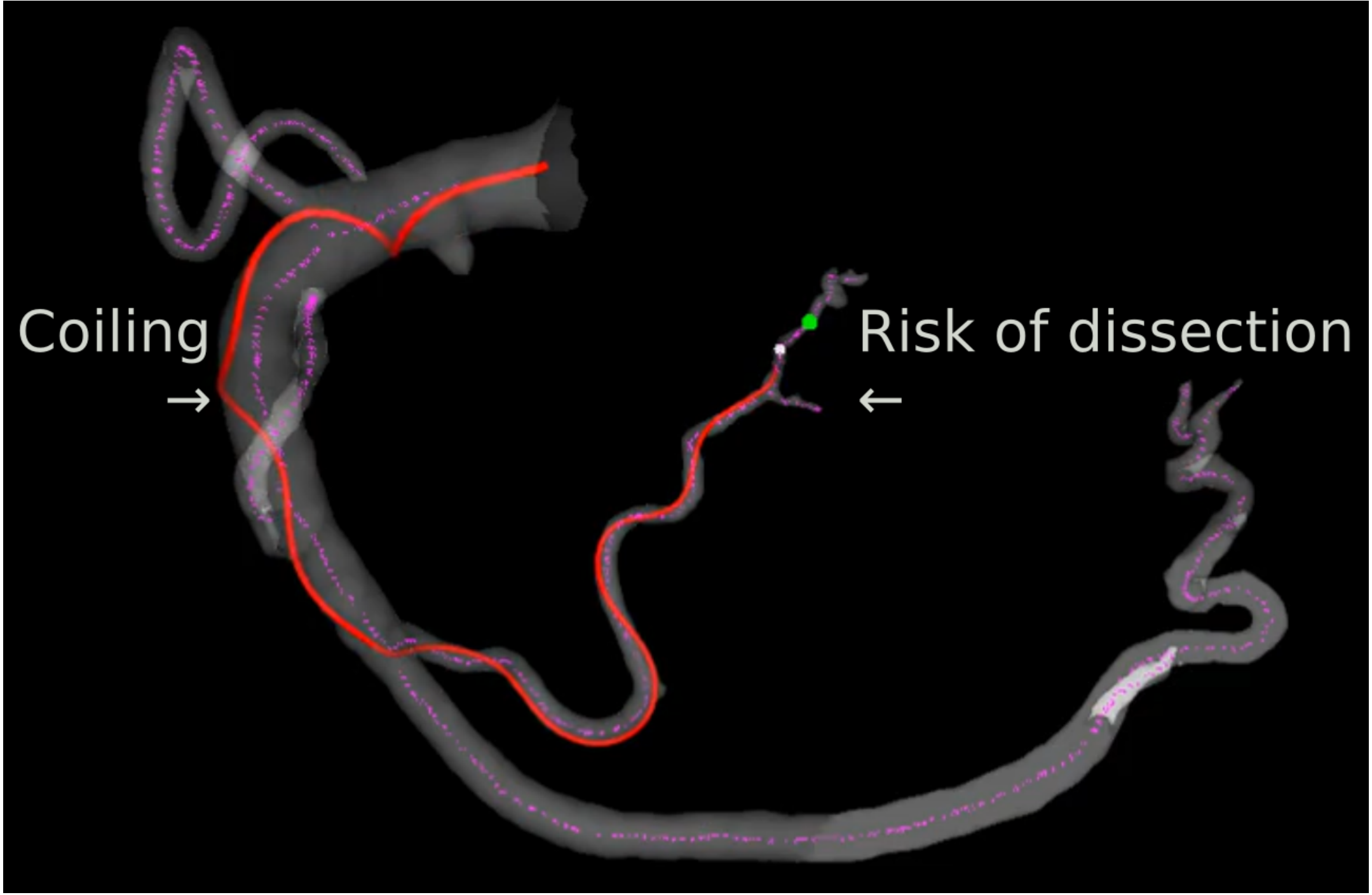
Image showing simulation involving robotic guidewire
8.9 Participation to several general paper on soft robobtics: state of art, roadmap and guide
Participants: Christian Duriez.
CD has participated to a review/guide paper 19 published in Nature Reviews Physics. With other participants, we have provided a concise guide to the main mathematical modelling approaches, and consequent computational modeling strategies, that can be used to describe soft robots and their physical interactions with the surrounding environment, including fluid and solid media. The goal of this perspective is to convey the challenges and opportunities within the context of modeling the physical interactions underpinning embodied intelligence.
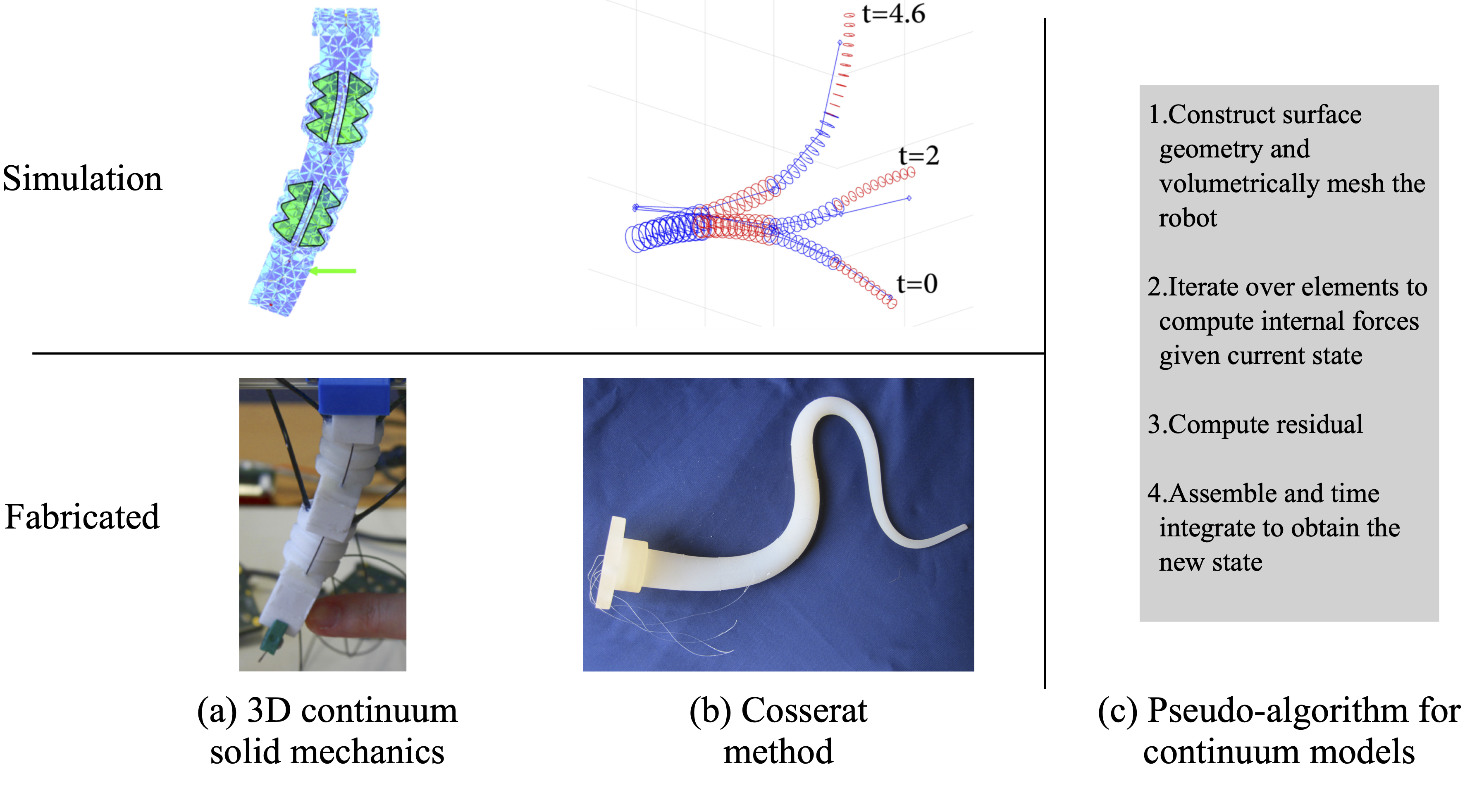
Image showing various examples of simulation of Cosserat models.
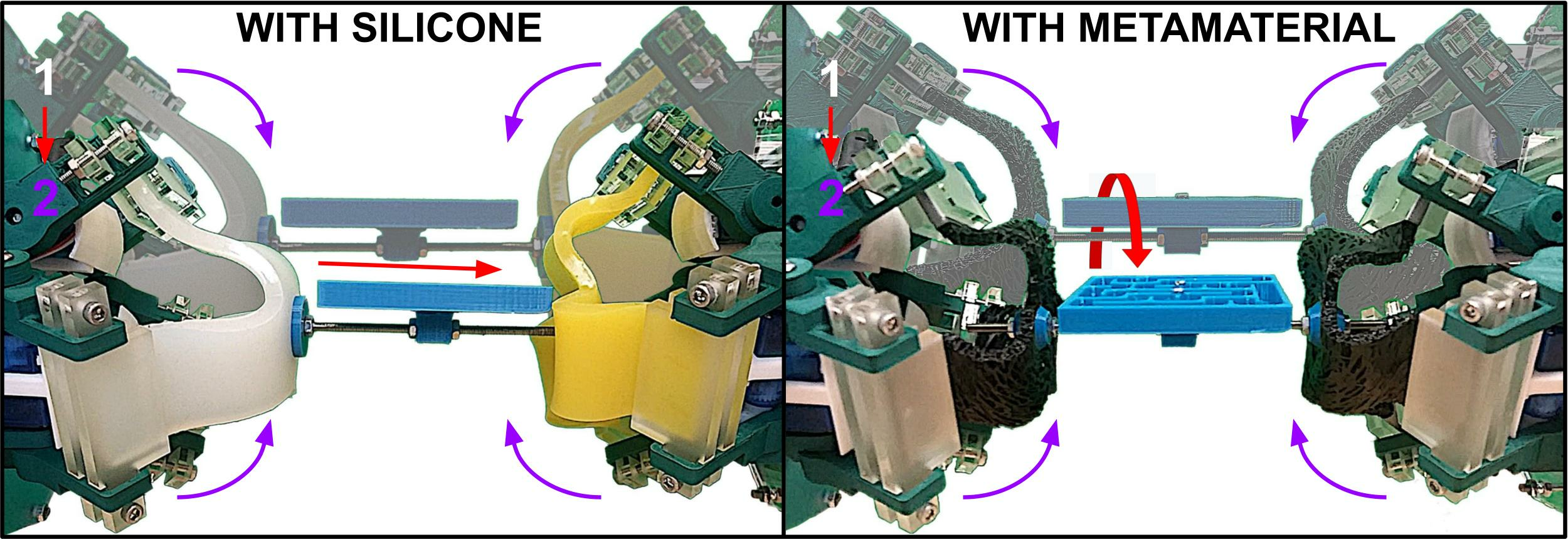
8.10 Calibration method for soft robots modeled with FEM: application to anisotropy
Participants: Felix Vanneste, Olivier Goury, Christian Duriez.
This paper 22 aims at contributing to the sim2real challenge in soft robotics. We present a method for automatic finite element model calibration based on real data using quadratic programming optimization. The method is generic and evaluated in this study to fit mechanical parameters from anisotropic materials. We show that we are able to optimize the mechanical properties of a given structure along its shape to achieve a given configuration goal. We show the methods interest for calibration by taking reference points from a real world robot and use them in our optimization process as goals the simulation has to match. Our process will minimize the errors introduced by manufacturing, imperfect models or even mechanical fatigue/plasticity.
Imagine showing a 6-DOF parallel soft-robot with meta-material.
8.11 Modeling of soft robots made of anisotropic mesostructured materials
Participants: Felix Vanneste, Olivier Goury, Christian Duriez.
Soft robotics is a recent field of robotics. It differs from classical rigid robotics by exploiting the compliance of the robot to create motion by deformation, rather than relying on articulations. Thanks to their inherent compliant composition, soft robots are particularly adapted for motion for deploying through unknown environment, grasping fragile objects or notably for human interactions. Soft systems are essentially fabricated with a homogeneous compliant material, like silicone. However, other, more relevant material choices could be made to design these robots. Recent works started to investigate the use of multimaterials, metamaterials or even smart materials inside soft structures to build systems with programmed compliance. In this work, we make the choice of using a stochastic foam to program soft robots structures with anisotropy using fiber direction on a given geometry. Using this foam, we show that we can create new controllable kinematics without changing the geometry of soft robots. The anisotropic soft robots are modeled using a Finite Element Method (FEM) with homogenised mechanical properties. We present a complete workflow 42: from model simulation and design to fabrication and interactive control with inverse simulation. Finally, we present a new generic mechanical calibration method and use it to reduce the sim2real discrepancy.
9 Bilateral contracts and grants with industry
9.1 Bilateral grants with industry
Participants: Pierre Schegg, Christian Duriez, Jeremie Dequidt.
Robocath is a French startup located in Rouen which is providing a robotic solution for catheter navigation to avoid exposure of the physician to X-rays. We have done a collaboration through the CIFRE thesis of Pierre Schegg. The defense took place at the end of May 2022. The results of the thesis provide new methods for automatic planning for navigation of the guide and catheter for interventions in cardiology. Unfortunately, the collaboration is now at a standstill and there was no follow-up to this thesis, because the board of the company wishes to focus on the sales of its robot.Participant: Christian Duriez, Jeremie Dequidt, Flavie Przybylski.
Caranx Medical is a startup company focusing on surgical robotics. Their aim is to revolutionize surgery with novel ground-breaking surgical robots. We have started a PhD thesis in Feb 2022 through the CIFRE program. The phD is focused on the use of vine robots in surgical robotics. We are working on a new model for everything robots.10 Partnerships and cooperations
10.1 International initiatives
10.1.1 Associate Teams in the framework of an Inria International Lab or in the framework of an Inria International Program
AC/DC
-
Title:
A Charm lab / Defrost team Collaboration
-
Duration:
From 2019 to 2022
-
Coordinator:
Allison Okamura (aokamura@stanford.edu)
-
Partners:
- Stanford University Stanford (États-Unis)
-
Inria contact:
Christian Duriez
-
Summary:
This project aims to strengthen the collaboration between the Defrost team (Deformable Robotic Software, Inria de Lille) and the Charm Lab (Collaborative HAptics and Robotics in Medicine Lab, Stanford University) on the topic of soft robots. On this topic, these two entities are very complementary because the Charm Lab is interested in the new design, the realization, the planning and the experimentation and the Defrost team is more centered on mechanical modeling, simulation and the algorithms of control. The collaboration is based on two axes: (1) the creation of flexible robots whose position and rigidity can be controlled, (2) the mechanical modeling and simulation of a robot that navigates in an environment through growth.
STEER
-
Title:
Soft exoskeletons with variable properties
-
Duration:
From 2021 to 2023
-
Coordinator:
Gang Zheng and Dingguo Zhang
-
Partners:
- University of Bath, UK
-
Inria contact:
Gang Zheng
-
Summary:
This Inria Lille North European Lab aims at developing wearable soft exoskeletons with variable damping or stiffness for helping disable people by developing new soft exoskeletons that may become hard at the period of supporting weight and transferring power, and then become soft at the working mode.
10.2 International research visitors
10.2.1 Visits to international teams
UCL collaboration on stiff-flop like robot
-
Title:
University College London - Department of Mechanical Engineering / Defrost team Collaboration
-
Duration:
Started in 2021
-
Coordinator:
Paul Chaillou (paul.chaillou@inria.fr)
-
Partners:
- University College London
-
Inria contact:
Christian Duriez
-
Summary:
The objective of this collaboration was to test if the robotic prototype developed by Mr. Wurdemann could meet our expectations, i.e. being capable of carrying SpiderMass technology in vivo, for MIS. They send to us their robotic module by the end of 2021, in order to modelise and simulate the prototype. Then, Paul get a MADIS mobility grant to go to UCL for two weeks in September, in order to do hardware/software connexion test and to develop close loop control. This collaboration leads to a common submission for Robosoft2023 conference. We will continue this collaboration next year, by inviting Jialei Shi, an UCL phd student, to Defrost, to do more integration tests.
10.3 European initiatives
10.3.1 Horizon Europe
SimCardioTest :
Participants: Camille Krewcun, Yinoussa Adagolodjo, Stefan Escaida, Christian Duriez, Jérémie Dequidt, Quentin Peyron.
-
Title:
In silico testing and certification of healthcare products
-
Duration:
2021 -> 2023
-
Coordinator:
Christian Duriez
-
Partners:
- Inria team Epione and Carmen
- Microport
- University Bordeaux
-
Team contact:
Christian Duriez
-
Summary:
Summary: Computer modelling and simulation have the power to increase speed and reduce costs in most product development pipelines. The EU-funded SimCardioTest project aims to implement computer modelling, simulation and artificial intelligence to design and test cardiac drugs and medical devices. Scientists will establish a platform for running in silico trials and obtaining scientific evidence based on controlled investigations. The simulation of disease conditions and cohort characteristics has the potential to overcome clinical trial limitations, such as under-representation of groups. It also reduces the size and duration of human clinical trials as well as animal testing, and offers robust, personalised information. Leveraging in silico technology in healthcare will expedite product and drug certification and offer patients the best possible care.
10.4 National initiatives
ROBOCOP
:
Participants: Lingxiao Xun, Yinoussa Adagolodjo, Olivier Goury, Christian Duriez, Alexandre Kruszewski, Gang Zheng.
Robotization of Cochlear implant. This is a 4-year project, supported by the ANR (French National Agency for Research) in the framework of PRCE, starting from 1 October 2019 until 31 March 2024. ROBOCOP aims at creating a new prototype of cochlear implant, and robotize (i.e. actuate and control) its insertion process to facilitate the work of surgeon, to increase the success ratio, and to decrease the probability of trauma.
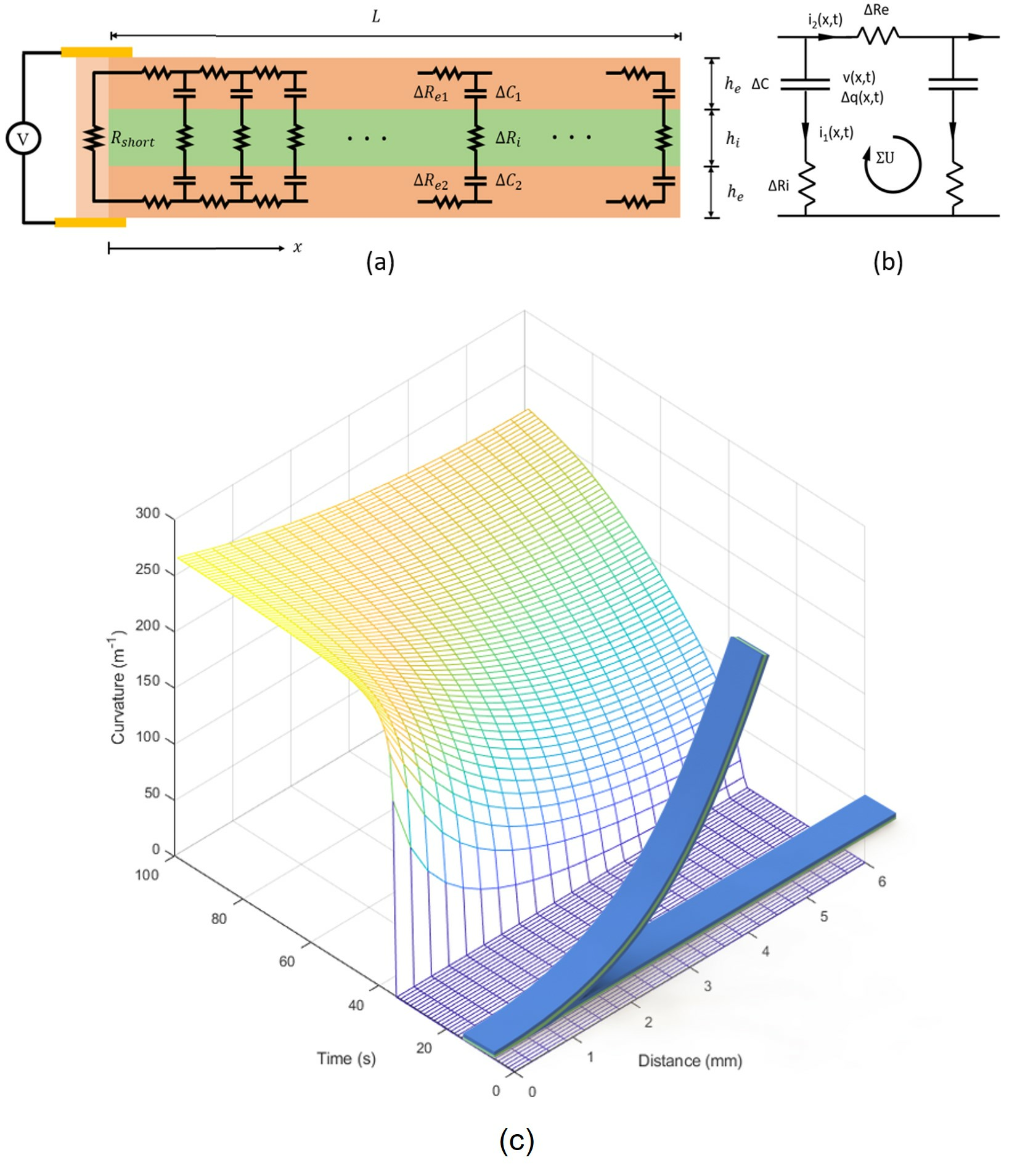
This year we proposed a simulator to our industrial partner Oticon. The objective of this simulator is to provide a reliable and low cost test environment (see 17) for cochlear implants marketed by the company. The experiments are continuing and a validation phase of the simulator by the company's engineers is scheduled for early February.
Simulation of the insertion of a cochlear implant.
Second significant event was the building a new generation of cochlear implant. We first propose, a mathematical model that connects the input voltages and the curvatures of the actuators used in the modeling of the cochlear. This work led to an article that will be published in a very close future. In a second step, we organize a study on the optimal design of the new implant. In this regard, we proposed a simulation based on the sofa frame to model the new implant. We do a recurring exchange with our Valencian laboratory partners to compare the results of the simulation with those of experimentation. The associated GitLab project.
COSSROOTS:
Participants: Yinoussa Adagolodjo, Olivier Goury, Christian Duriez, Gang Zheng.
Cosserat Rod Theory for Slender Robots. This is a 4 year project, supported by the ANR (French National Agency for Research) in the framework of PRC, starting from 1 November 2020 until 31 October 2024. The objective of COSSEROOTS project is to systematically investigate the relative parameterization modeling technique in order to create for the first time a toolbox dedicated to modeling and control of slender, flexible, continuous, bio-inspired robots that can undergo large, controlled deformations. associated GitHub project.In 2022, the main contribution was on the software aspects. We have proposed two stable versions (V21.06 and V21.12) of the software compatible with the same versions of the SOFA Framework. The software allows the modeling of 1D objects such as needle, rod, cable or catheters using the linear discrete Cosserat theory. Using a reduced coordinate formulation, the model allows geometrically-exact modeling while facilitating simulations, with complex scenarios, in real time.The model implemented were described in 44
In addition, new important features have been added to the software recently. Indeed, we have introduced the possibility of taking into account the plastic behavior of certain objects we use in our different simulations. A nonlinear model of the previous described model is currently under evaluation.
ADT Plan IA:
Participants: Alexandre Bilger, Damien Marchal, Christian Duriez.
The simulation of soft-robots is a growing field since it is a way to virtually train AI algorithms in taking decisions. To tackle this challenge, accurate modeling the interactions of the robots with their environment is key. This is already possible today, but at the cost of a (too) long calculation time or a significant simplification of the environment. A ADT started this year to modernize the matrix assembly in SOFA and to bring the solving algorithms up to standard. Results of this work are already visible in the latest SOFA release (v21.12) and its advances can be followed on the associated GitHub project.Participants: Christian Duriez, Damien Marchal, Gang Zheng.
ANR Equipex+ TIRREX: TIRREX project aims to develop new emblematic platforms in robotics with a national coordination for their access and development. The project brings together all the major players in French academic research in robotics (CNRS, INRIA, CEA, INRAE) with 19 partners. It is structured around 6 thematic axes: Humanoid Robotics, XXL Robotics, Micro-Nano Robotics, Autonomous Terrestrial Robotics, Aerial Robotics and Medical Robotics, and transversal axes: Prototyping & Design, Manipulation, and open Infrastructure. Christian Duriez is co-responsible of the axis open Infrastructure, in particular for the development of digital twins.10.5 Regional initiatives
Participants: Christian Duriez, Alexandre Kruszewski, Eulalie Coevoet, Thor Bieze.
START'AIRR:This is a short project, supported by the Hauts-de-France region (through StartAIRR call), starting from the 1st of April 2021 and ending the 31th of July 2022. The objective of this project is the creation of a prototype of a cobotic robot for pick and place tasks in the food-processing industry, for instance in production lines under severe spatial constraints that require the transportation of objects from one process line to another. If this project is successful, it could lead to the creation of a company.11 Dissemination
Participants: Christian Duriez, Alexandre Kruszewski, Damien Marchal, Gang Zheng, Paul Chaillou, Jérémie Dequidt, Tanguy Navez, Yinoussa Adagolodjo, Quentin Peyron.
11.1 Scientific events
11.1.1 Event organization
- The team organized and hosted the first Deformation in Robotics (Def-Robotics2022) summer school. During one week, the 45 participants attended to lectures and practical sessions on the fundamental concepts (modelling, simulation and control) necessary for the use of deformable materials in soft robotics, continuum robotics, hybrid rigid/deformable robotics as well as in rigid robotics interacting with a deformable environment. The lectures were given by renewed researches from Inria, CNRS and Universities. With an international audience the summer school was successful with attendes' rating it at 4.6/5.
- Organization at RobotSoft2022 of a tutorial session dedicated to Modeling, simulation and control of deformable robots on SOFA framework.
11.1.2 Conference
Chair of conference program committees
- Christian Duriez was chair of Workshops and Tutorial at the conference Robosoft 2022.
Member of the conference program committees
- Christian Duriez was member of the program committee of Robosoft 2022.
- Jeremie Dequidt was member of the following program committees: ISVC'22, JFIG'22
11.1.3 Journal
Member of the editorial boards
- Gang Zheng is associate editor of IET Cyber-Systems and Robotics
11.1.4 Reviewer
- Christian Duriez is reviewer for Nature Communication, SORO, IEEE RA-L, Frontiers Robotics, ICRA, IROS.
- Quentin Peyron is a reviewer for IEEE RA-L, IEEE T-RO, IEEE T-Mech, and Mechanism & Machine Theory
- Alexandre Kruszewski is a reviewer for IEEE T-RO, Fuzzy sets and systems,
- Yinoussa Adagolodjo is a reviewer for IEEE T-RO, ROBOSOFT, IEEE RA-L, ISMAR, Mathematical and Computer Modeling of Dynamical Systems
- Jeremie Dequidt is a reviewer for IEEE RA-L, IEEE T-RO, ROBOSOFT, IEEE ToH, IJCARS, JFIG
11.2 Invited talks
- Seminar entitled "Modeling, Design and Control of Soft robots: a tour of Defrost's research" presented at the JRL (Tsukuba), Yoshida's lab (Tokyo) and GV lab (Tokyo), Japan.
11.2.1 Leadership within the scientific community
- Christian Duriez is co-director of the PEPR O2R
11.2.2 Scientific expertise
- Christian Duriez did a review of an ERC project and is a scientific expert and co-founder of the company inSimo
- Jeremie Dequidt was member of the CE33 "Interaction, Robotics" for the french research agency (ANR)
- Damien Marchal was reviewer for the french research agency (ANR)
11.2.3 Research administration
- Christian Duriez is co-responsible for the axis Open-Infrastructure in the Equipex+ projet TIRREX
- Gang Zheng is member of Ecole Doctorale MADIS in the domain of AGITSI
- Gang Zheng is member of the scientific bureau of Inria Lille – Nord Europe
- Damien Marchal was member of an Hcérès evaluation comittee.
- Damien Marchal was chair of the BAP-E engineer internal recruitement juries for CNRS.
- Damien Marchal is in charge of GhG accounting of the CRIStAL laboratory and is local coordinator for sustainable practices for the University of Lille and CNRS.
- Damien Marchal is in charge of the engineering service of the CRIStAL laboratory.
11.3 Teaching - Supervision - Juries
11.3.1 Teaching
Teaching administration
- Jérémie Dequidt is the head of the Embedded Systems Department at Polytech Lille
- Alexandre Kruszewski is in charge of the Embedded and Cyberphysical system major of Centrale Lille. He is also in charge of the coordination of the ‘automatic control' part of the EEA department of Centrale Lille Institute.
Teaching activities
- Engineering cycle: Paul Chaillou, (Automatic control and embedded systems), 64h, level L2, L3 and M1, Centrale Lille.
- Engineering cycle: Alexandre Kruszewski, 14 modules (automatic control, numeric control, embedded systems, robotics etc.), 250h, level (L3, M1, M2), Centrale Lille
- Engineering cycle: Jeremie Dequidt 6 modules (Programming, Software Engineering, Embedded Systems, Databases, Medical Simulation etc.) 350h, level (L3, M1, M2), Polytech Lille
- Master: Christian Duriez, Soft robotics, 24h, M2, Graduate degree en intelligence artificielle à l'Ecole Polytechnique (Palaiseau)
- Engineering cycle: Yinoussa Adagolodjo 6 modules ( Medical Simulation, Automatics, Optimization, Robotics, Industrie 4.0, Programming) 144h, level ( L3, M1, M2), Polytech Lille, IMT Nantes
- Engineering cycle: Etienne Ménager, Programming Software Engineering, 64h, level (L3,M1) , Polytech Lille
- Engineering cycle: Quentin Peyron, Automatique IE3 and IE4, Modélisation et commande de systèmes, h, level (L3,M1), Centrale Lille.
- Engineering cycle: Damien Marchal, Introduction to Database, 24h, level(M1), Polytech Lille.
11.3.2 PhD Supervision
- Azouaou Ouyoucef, Control of soft parallel robots, supervised by G. Zheng, Q. Peyron, F. Boyer.
- Flavie Przybylski, Design, modeling and fabrication of soft Endoscope, supervised by C. Duriez and J. Dequidt
- Paul Chaillou, Modeling and simulation of soft robot for in-vivo cancer imaging with Mass Spectrometry, supervised by A. Kruszewski, I. Fournier
- Ke Wu, Design, Modeling, Optimization and Control of compliant mechanisms, supervised by . Zheng
- Lingxiao Xun, Modeling and control of ionic polymers, supervised by A. Kruszewski and G. Zheng
- Haihong Li, Modeling and control of soft robot via Cosserat theory, supervised by G. Zheng
- Yiru Guo , Design and analysis of flexible mechanisms, supervised by G. Zheng and A. Polyakov
- Tanguy Navez, Embodied Intelligence and Mechanical modelling of soft robots using AI, supervised by C. Duriez and O. Goury
- Etienne Ménager, Artificial Intelligence for High Level Control, supervised by C. Duriez
11.3.3 Juries
-
Christian Duriez was reviewer of the PhD thesis of:
- Debora Zrinscak from Scuola Univeristaria Superiore Pisa
- Eleonora TAGLIABUE from Universita degli studi di Verona
- Maxence LEVEZIEL from Université de Bourgogne Franche-Comté
- Soumianarayanan Vijayaraghavan from Université du Luxembourg and Université de Liège
- Simon Duenser from ETH Zurich
He was examiner for the Habilitation thesis of
- Thomas Pietrzak at University of Lille
- Nabil Zemiti at University of Montpellier
He was examiner during the PhD defense of:
- Julien Ducrocq from the Université de Picardie Jules Verne
11.4 Popularization
11.4.1 Internal or external Inria responsibilities
- RJMI : Rendez-vous des jeunes mathématiciennes et informaticiennes
11.4.2 Education
- Paul Chaillou, Yinoussa Adagolodjo and Quentin Peyron presented the team research activities to master and bachelor students at the RIC day organized by the CRIStAL laboratory
- Quentin Peyron participated to the Option Innovation day organized by INRIA's Po and presented his research position to middle-highschool students.
12 Scientific production
12.1 Major publications
- 1 articleSoftware toolkit for modeling, simulation and control of soft robots.Advanced Robotics31November 2017, 1208-1224
- 2 inproceedingsControl of Elastic Soft Robots based on Real-Time Finite Element Method.ICRA 2013 IEEE International Conference on Robotics and AutomationKarlsruhe, France2013
- 4 articleFast, generic and reliable control and simulation of soft robots using model order reduction.IEEE Transactions on Robotics3462018, 1565 - 1576
- 5 articleSofaGym: An open platform for Reinforcement Learning based on Soft Robot simulations.Soft Robotics2022
- 6 articleDesign, implementation and control of a deformable manipulator robot based on a compliant spine.The International Journal of Robotics ResearchMay 2020
- 7 articleControl Design for Soft Robots based on Reduced Order Model.IEEE Robotics and Automation Letters41January 2019, 25-32
- 8 articleAnisotropic soft robots based on 3D printed meso-structured materials: design, modeling by homogenization and simulation.IEEE Robotics and Automation Letters52January 2020, 2380-2386
- 9 articleFEM-based Gain-Scheduling Control of a Soft Trunk Robot.IEEE Robotics and Automation Letters2021
12.2 Publications of the year
International journals
National journals
International peer-reviewed conferences
Doctoral dissertations and habilitation theses
Reports & preprints
12.3 Cited publications
- 44 articleCoupling numerical deformable models in global and reduced coordinates for the simulation of the direct and the inverse kinematics of Soft Robots.IEEE Robotics and Automation Letters62April 2021, 3910-3917
- 47 articleFEM-based Gain-Scheduling Control of a Soft Trunk Robot.IEEE Robotics and Automation Letters622021, 3081 - 3088