
2023Activity reportProject-TeamDEFROST
RNSR: 201521175F- Research center Inria Centre at the University of Lille
- In partnership with:Ecole Centrale de Lille, CNRS, Université de Lille
- Team name: DEFormable Robotics SofTware
- In collaboration with:Centre de Recherche en Informatique, Signal et Automatique de Lille
- Domain:Perception, Cognition and Interaction
- Theme:Robotics and Smart environments
Keywords
Computer Science and Digital Science
- A2.3.3. Real-time systems
- A3.1.1. Modeling, representation
- A5.5. Computer graphics
- A5.6. Virtual reality, augmented reality
- A5.10. Robotics
- A6.2.1. Numerical analysis of PDE and ODE
- A6.2.6. Optimization
- A6.4.3. Observability and Controlability
- A6.4.4. Stability and Stabilization
- A9.2. Machine learning
- A9.5. Robotics
Other Research Topics and Application Domains
- B2.5.1. Sensorimotor disabilities
- B2.5.3. Assistance for elderly
- B2.7. Medical devices
- B3.1. Sustainable development
- B5.1. Factory of the future
- B5.2. Design and manufacturing
- B5.5. Materials
- B5.6. Robotic systems
- B5.7. 3D printing
- B9.2. Art
1 Team members, visitors, external collaborators
Research Scientists
- Christian Duriez [Team leader, INRIA, Senior Researcher, HDR]
- Quentin Peyron [INRIA, Researcher]
- Gang Zheng [INRIA, Researcher, HDR]
Faculty Members
- Yinoussa Adagolodjo [UNIV LILLE, Associate Professor]
- Jérémie Dequidt [UNIV LILLE, Associate Professor, until Aug 2023, HDR]
- Jérémie Dequidt [UNIV LILLE, Professor, from Sep 2023, HDR]
- Alexandre Kruszewski [CENTRALE LILLE, Associate Professor, HDR]
Post-Doctoral Fellows
- Camille Krewcun [INRIA, Post-Doctoral Fellow, until Feb 2023]
- Félix Vanneste [INRIA, Post-Doctoral Fellow, from Oct 2023]
PhD Students
- Paul Chaillou [INRIA]
- Agneyan Dileep [UNIV LILLE, from Oct 2023]
- Yiru Guo [CSC Scholarship]
- Haihong Li [CSC Scholarship, until Sep 2023]
- Etienne Ménager [INRIA]
- Tanguy Navez [UNIV LILLE]
- Azouaou Ouyoucef [INRIA]
- Sizhe Tian [UNIV LILLE, from Nov 2023]
- Ke Wu [INRIA, until Mar 2023]
- Lingxiao Xun [INRIA]
- Zitong Yang [CSC Scholarship, from Dec 2023]
Technical Staff
- Damien Marchal [CNRS, Engineer]
- Samuel Mohsen Hanna Youssef [INRIA, Engineer, from Apr 2023]
Interns and Apprentices
- Thomas Deffontaines [Ecole Centrale, Intern]
- Stéphane Despierres [Ecole Centrale, Intern]
- Touria El Azrak [UNIV LILLE, Intern, from Apr 2023 until Jun 2023]
- Nathanaël Haas [INRIA, Intern, from May 2023 until Aug 2023]
- Baptiste Lievin [INRIA, Intern, from May 2023 until Oct 2023]
- Thibaud Piccinali [INRIA, Intern, from Oct 2023]
- Yehia Sharif [UNIV EVRY, Intern, from Apr 2023 until Aug 2023]
- Yehya Sharif [INRIA, Intern, from Mar 2023 until Aug 2023]
- Tinhinane Smail [INRIA, Intern, from Apr 2023 until Aug 2023]
- Gabin Vanbatten [ICAM, Intern, from May 2023 until Jul 2023]
Administrative Assistant
- Anne Rejl [INRIA]
Visiting Scientists
- Pasquale Ferrentino [UNIV LIBRE BRUXELLES, from Mar 2023 until Jul 2023]
- Flavie Przybylski [CARANX MEDICAL]
External Collaborator
- Thor Enrique Morales Bieze [Unemployed (waiting for creation of Compliance Robotics), from Oct 2023]
2 Overall objectives
The team DEFROST aims to address the open problem of control, modelling and design methods for deformable robots by answering the following challenges:
- Providing numerical methods and software support to reach the real-time constraint needed by robotic systems: the numerical solutions for the differential equations governing the deformation generate tens of thousands degrees of freedom, which is three orders of magnitude of what is frequently considered in classical methods of robotic modelling and control.
- Integrating deformation models in the control methods of soft robot: In soft-robotics, sensing, actuation and motion are coupled by the deformations. Deformable models must be placed at the heart of the control algorithm design.
- Investigating predictable interaction models with soft-tissues and parameter estimation by visual feedback from medical imaging: on the contrary too many cases in surgical robotics, the contact of the soft robot with the anatomy is permitted and it creates additional deformations on the robot.
- Developing generic design methodologies for soft robotic systems to obtain desired performances in terms of motion and generated forces: the design-space of a soft robot is usually composed of a large number of parameters of different nature (geometry, mechanical properties, actuator and sensor location) and which have a coupled and non-linear effect in the robot behavior.
3 Research program
3.1 Introduction
Our research crosses different disciplines: numerical mechanics, control design, robotics, optimisation methods and clinical applications. Our organisation aims at facilitating the team work and cross-fertilisation of research results in the group. We have three objectives (1, 2 and 3) that correspond to the main scientific challenges. In addition, we have two transverse objectives that are also highly challenging: the development of a high-performance software support for the project (Objective 4) and the validation tools and protocols for the models and methods (Objective 5).
3.2 Objective 1: Accurate model of soft robot deformation computed in finite time
The objective is to find concrete numerical solutions to the challenge of modeling soft robots with strong real-time constraints. To solve continuum mechanics equations, we will start our research with real-time Finite Element Method (FEM) or equivalent methods that were developed for soft-tissue simulation. We will extend the functionalities to account for the needs of a soft-robotic system:
- Coupling with other physical phenomenons that govern the activity of sensors and actuators (hydraulic, pneumatic, electro-active polymers, shape-memory alloys, etc.).
- Fulfilling the new computational time constraints (harder than surgical simulations for training) and find a better tradeoff between cost and precision of numerical solvers using reduced-order modeling techniques with error control.
- Exploring interactive and semi-automatic optimisation methods for design based on obtained solutions for fast computations on soft robot models.
3.3 Objective 2: Model based control of soft robot behavior
The focus of this objective is on obtaining a generic methodology for soft robot feedback control. Several steps are needed to design a model based control using FEM approach:
- The fundamental question of the kinematic link between actuators, sensors, effectors and contacts using the most reduced mathematical space must be carefully addressed. We need to find efficient algorithms for real-time projection of non-linear FEM models in order to pose the control problem using the only relevant parameters of the motion control.
- Intuitive remote control is obtained when the user directly controls the effector motion. To add this functionality, we need to obtain real-time inverse models of the soft robots by optimisation. Several criteria will be combined in this optimisation: effector motion control, structural stiffness of the robot, reduce the intensity of the contact with the environment, etc.
- Investigating closed-loop approaches using sensor feedback: as sensors cannot monitor all points of the deformable structure, the information provided will only be partial. We will need additional algorithms based on the FEM model to obtain the best possible treatment of the information. The final objective of these models and algorithms is to have robust and efficient feedback control strategies for soft robots. One of the main challenges here is to ensure / prove stability in closed-loop.
3.4 Objective 3: Modeling interaction with a complex environment
Even if the inherent mechanical compliance of soft robots makes them safer, more robust and particularly adapted to interaction with fragile environments, the contact forces need to be controlled by:
- Setting up real-time modeling and the control methods needed to pilot the forces that the robot imposes on its environment and to control the robot deformations imposed by its environment. Note that if an operative task requires to apply forces on the surrounding structures, the robot must be anchored to other structures or structurally rigidified.
- Providing mechanics models of the environment that include the uncertainties on the geometry and on the mechanical properties, and are capable of being readjusted in real-time.
- Using the visual feedback of the robot behavior to adapt dynamically the models. The observation provided in the image coupled with an inverse accurate model of the robot could transform the soft robot into sensors: as the robot deforms with the contact of the surroundings, we could retrieve some missing parameters of the environment by a smart monitoring of the robot deformations.
3.5 Objective 4: Soft Robotics Software
Expected research results of this project are numerical methods and algorithms that require high-performance computing and suitability with robotic applications. There is no existing software support for such development. We propose to develop our own software, in a suite split into three applications:
- The first one will facilitate the design of deformable robots by an easy passage from Computer-Aided Design (CAD) software (for the design of the robot) to the FEM based simulation.
- The second one is an anticipative clinical simulator. The aim is to co-design the robotic assistance with the physicians, thanks to a realistic simulation of the procedure or the robotic assistance. This will facilitate the work of reflection on new clinical approaches prior any manufacturing.
- The third one is the control design software. It will provide real-time solutions for soft robot control developed in the project.
3.6 Objective 5: Validation and application demonstrations
The implementation of experimental validation is a key challenge for the project. On one side, we need to validate the model and control algorithms using concrete test case examples in order to improve the modeling and to demonstrate the concrete feasibility of our methods. On the other side, concrete applications will also feed the reflections on the objectives of the scientific program.
We will build our own experimental soft robots for the validation of objectives 2 and 3 when there is no existing “turn-key” solution. Designing and making our own soft robots, even if only for validation, will help the setting-up of adequate models.
For the validation of Objective 4, we will develop “anatomical soft robot”: soft robot with the shape of organs, equipped with sensors (to measure the contact forces) and actuators (to be able to stiffen the walls and recreate natural motion of soft-tissues). We will progressively increase the level of realism of this novel validation set-up to come closer to the anatomical properties.
4 Application domains
4.1 Industry
Robotics in the manufacturing industry is already widespread and is one of the strategies put in place to maintain the level of competitiveness of companies based in France and to avoid relocation to cheap labor countries. Yet, in France, it is considered that the level of robotization is insufficient, compared to Germany for instance. One of the challenges is the high investment cost for the acquisition of robotic arms. In recent years, this challenge has led to the development of “generic” and “flexible” (but rigid) robotic solutions that can be mass produced. But their applicability to specific tasks is still challenging or too costly. With the development of 3D printing, we can imagine the development of a complete opposite strategy: a “task-specific” design of robots. Given a task that needs to be performed by a deformable robot, we could optimize its shape and its structure to create the set of desired motions. A second important aspect is the reduction of the manufacturing cost: it is often predicted that the cost of deformable robots will be low compared to classical rigid robots. The robot could be built on one piece using rapid prototyping or 3D printers and be more adapted for collaborative work with operators. In this area, using soft materials is particularly convenient as they provide a mass/carried load ratio several orders of magnitude higher than traditional robots, highly decreasing the kinetic energy thus increasing the motion speed allowed in the presence of humans. Moreover, the technology allows more efficient and ergonomic wearable robotic devices, opening the option for exo-skeletons to be used by human operators inside the factories and distribution centers. This remains to be put in place, but it can open new perspectives in robotic applications. A last remarkable property of soft robots is their adaptability to fragile or tortuous environments. For some particular industry fields (chemistry, food industry, etc.) this could also be an advantage compared to existing rigid solutions. For instance, the German company festo, key player in the industrial robotics field, is experimenting with deformable trunk robots that exhibit great compliance and adaptability, and we are working on their accurate control.
4.2 Personal and service robotics
Personal and service robotics are considered an important source of economic expansion in the coming years. The potential applications are numerous and in particular include the challenge of finding robotic solutions for active and healthy aging at home. We plan to develop functional orthosis for which it is better not to have a rigid exoskeleton that is particularly uncomfortable. These orthosis will be ideally personalized for each patient and built using rapid prototyping. On this topic, the place of our team will be to provide algorithms for controlling the robots. We will find some partners to build these robots that would fall in the category of “wearable robots”. With this thematic we also connect with a strong pole of excellence of the region on intelligent textiles (see Up-Tex) and with the strategic plan of INRIA (Improving Rehabilitation and Autonomy).
4.3 Entertainment industry and arts
Robots have a long history with entertainment and arts where animatronics have been used for decades for cinematographic shootings, theater, amusement parks (Disney's audio-animatronic) and performing arts. This year, we obtained an award for an Art Installation at the Exhibit Panorama 22. The installation “L'Érosarbénus”, which was produced at Le Fresnoy for the exhibition Panorama 22, is a collaboration between visual artist Yosra Mojtahedi and DEFROST. This installation, whose aesthetics are inspired by rocky, plant and human forms, is brought to life with the help of Soft Robotics devices. It was awarded the prize “Révélation Art Numérique — Art Vidéo 2020” by the ADAGP. See the ARTE video.
4.4 Medical Applications
Soft robots have many medical applications as their natural compliance make them safer than traditional robots when interacting with humans. Such robots can be used for minimally invasive surgery, to access and act on remote parts of the body through minimal incisions in the patient. Applications include laparascopic and brain surgery, treatment of several cancers including prostate cancer, and cardiology, for example percutaneous coronary interventions. As an example, we received an industry grant (CIFRE) with Robocath to work on autonomous catheter navigation. See Section 9.
Another application is cochlear implant surgery in the project ANR ROBOCOP.
5 Social and environmental responsibility
The team fully endorses the needs for an increased integration of social and environmental responsibility and seeks to align with the 17 Sustainable Development Goals laid out by the United Nations. The team also acknowledges the Net Zero target of the 2050 Paris agreement and is working either on its practices as well as on its scientific objectives to align with the 2030's intermediate GhG emission roadmap.
In terms of social responsibility, the team wants to point out that environmental concerns were mentioned by postdocs, graduated PhD students and visiting master students regarding theirs willingness to make or not a scientific career. This increased expression is something we should pay attention to and for which building a shared vision and clear actions and message is important not only for the team but also for our scientific community and more generally INRIA.
This is why, in addition to the best practices recommended by INRIA, the team supports the actions put in place either by other teams individuals or collectives as the "Ma Petite Planète" challenge organized by the Staff Organization (AGOS).
5.1 Footprints of research activities
The CRIStAL laboratory and the University of Lille account for their GHG emissions. The CRIStAL accounting is done by Damien Marchal, member of DEFROST. This gives us an overview of our current footprint, which is probably quite common for a research and technology oriented team. Travel, commuting, office occupancy, hardware equipment and operation are the most significant elements of our footprint. The results were presented and discussed during one of our team meeting. In the following are presented our activities for the elements where clear direction and actions have been taken.
5.1.1 Traveling
In terms of traveling, we are following the Inria general travel policy. We are also adopting a frontrunner approach and encourage team members to adopt the more ambitious flyless guide produced by the Inria MakeSenS initiative.
Currently we:
- favor visio-conferencing whenever possible and beneficial,
- choose alternative modes of transportation to flying. Our analysis shows that destination reachable by a train travel bellow 8h allows to reach maximum efficiency in GES emission reduction while still being manageable if the alternative is comfortable high-speed train.
- strategically select the workshop and conferences location we attend to reach the best scientific impact, scientific community building while reducing the transportation footprint.
5.1.2 Daily commuting
With other laboratories from the University of Lille, the team is actively promoting for more sustainable commuting practices and is participating to local initiatives or national ones like being part of the Inria AGOS's team at the national challenge MaiAVélo. In 2023, all Inria's center participated to this event as well as a continuously increased amount of research institutions in France (universities, research institutes, cnrs). In addition, Damien Marchal, member of the team is co-animator of the mobility workgroup for University of Lille. His activities include support for the statistical analysis updates of the University of Lille commuting practices and commuting plans. In 2023 he took part, as a coordinator of the University of Lille workgroups in charge of proposing a sustainability roadmap. The resulting document was voted in June 2023. 2024 should be the begining of its implementation.
Finally we also make sure that the team members are informed of the transportation allowances at Inria and favoring sustainability among which the "Forfait Mobilité Durable" and the public transportation allowance.
5.1.3 Sharing objectives externally
The team, not only encourages its members to adhere to the highest practice standard but also to adopt a frontrunner position. This includes sharing our objectives and ambitions with peers and research community (eg: having one slide related to footprint in the team presentations slides). In 2023, the CRIStAL laboratory organized several sessions "Fresque du climat" and "Fresque du Numérique" to its members and EP's. In 2023, Damien Marchal, from our team, set up a new master course at University of Lille for computer science students. This master is titled "Enjeux Environmentaux et Société" (society and sustainability). After a general introduction to climate, biodiversity, energy and resources issues in-depth presentations have been done including, strongly relying on INRIA's members expertize:
- D. Marchal (DEFROST): Climate modeling and simulation.
- D. Marchal (DEFROST): Ghg accounting.
- A. Luxey (SPIRALS): ACV analysis for strategic decision taking.
- S. Cerf (SPIRALS): ACV analysis for strategic decision taking.
- R. Rouvoy (SPIRALS): measuring the environmental impacte of software and IT.
- D. Debarbieux (Norsys, alumni of LINKS): .
- P. Marquet (University of Lille): Good practices as an IT manager and EcoInfo.
5.2 Impact of research results
The team hopes to tackle ecology-oriented research problems related to soft robotics in the near future. In 2022, we began to set up the research environment to do so.
A new researcher, Quentin Peyron, has been hired which research plan focuses on the development of industrial soft robots with a low ecological footprint. The main concept is to leverage the inherent compliance of untransformed plant-based elements, such as wicker branches and bamboo stems, to fabricate soft manipulators with minimal energy consumption and CO2 emission. The research plan also includes the development of new physical architectures, models and control laws to minimize soft robot's energy consumption once online.
The team also applied and received a BQR grant from Centrale Lille (9500€) for the design and fabrication of a first prototype of eco-designed soft manipulator.
6 Highlights of the year
6.1 Awards
The Ph.D. student Ke Wu has been awarded as "Outstanding Self-Financed Students Abroad" by Chinese government for his work on "Design, Modeling, Optimization and Control of Compliant Mechanisms" 41.
6.2 European Project: IRE
The project IRE (Intelligent Robotic Endoscopes For Improved Healthcare Services) has been accepted for funding by the European commission in July 2023. The project is led by UCPH (DK) and will address multiple scientific and technical challenges related to intelligent robotic endoscopy. Due to the under-actuated and under-capacitated nature of endoscopes, the project will exploit a digital value chain based on simulation models and learning techniques to reconstruct missing information and guide intelligent algorithms. The development of simulation models of soft endoscopes and soft anatomy will rely on modern statistical modeling methods for anatomy/geometry, as well as model order reduction and differentiable simulation for mechanics. In addition, learning-based techniques will guide the design of control policies, navigation methods and feedback based on sensory augmentation. New methods will be tested on phantoms, as a validation step towards clinical deployment. Smart endoscopes are not intended to replace humans, but they will give the operator enriched information to make informed decisions. The results of the project will be demonstrated in the context of colonoscopy, as a particularly high-impact case of endoscopy. In this project DEFROST will lead the work-package 3 which will focus on the design, simulation and building of anthropomorphic anatomic phantoms.
6.3 Habilitation of Jérémie Dequidt
After so many years of procrastination (...), Jérémie Dequidt passed his Habilitation with flying colors... and passed the competitive examination to become full professor at Lille University. Congratulations!
7 New software, platforms, open data
7.1 New software
7.1.1 SoftRobots
-
Name:
SoftRobots plugin for Sofa
-
Keywords:
Numerical simulations, Problem inverse, Soft robotics
-
Functional Description:
Modelling, simulation and control of soft robots. This plugin allows the modeling of deformable robots in the Sofa platform. It allows the modeling of different actuators, such as cable, pneumatic pressure, hydraulics and other simpler types of actuation. It also contains useful tools for animation design or communication with the robot. Coupled with the SoftRobots.Inverse plugin, it also allows the control of these robots. More information can be found on the dedicated website.
- URL:
- Publication:
-
Contact:
Christian Duriez
-
Participants:
Christian Duriez, Olivier Goury, Jérémie Dequidt, Damien Marchal, Eulalie Coevoet, Felix Vanneste
-
Partner:
CRIStAL
7.1.2 Model Order Reduction Plugin for SOFA
-
Name:
Model Order Reduction Plugin for SOFA
-
Keywords:
Model Order Reduction, Sofa, Finite element modelling
-
Scientific Description:
This plugin allows speed-up of SOFA simulations by providing tools to create a reduced version of the SOFA simulation that runs at much higher rates but remains accurate. Starting with a snapshot of the object deformations on a high-dimensional Finite Element mesh, Proper Orthogonal Decomposition (POD) is used to compute a reduced basis of small dimension representing correctly all the possible deformations of the object. The original system describing the object motion is then greatly reduced. To keep numerical efficiency, a hyper-reduction method is used to speed-up the construction of the reduced system.
-
Functional Description:
This plugin allows to dramatically reduce computational time in mechanical simulation in the SOFA framework. A reduced simulation, of much smaller dimension but still accurate is created in an automatic way by the plugin. Building the reduced model may take time, but this operation is made once only. The user can then benefit from a reduced and interactive version of his/her simulation without significant loss of accuracy.
-
Release Contributions:
This is the first version of the plugin.
- URL:
- Publication:
-
Contact:
Olivier Goury
-
Participants:
Olivier Goury, Felix Vanneste, Christian Duriez, Eulalie Coevoet
7.1.3 SoftRobots.Inverse
-
Name:
SoftRobots.Inverse
-
Keywords:
Sofa, SoftRobots
-
Scientific Description:
This plugin implements a method to compute the inverse model of a robot in its environment. The input of the method is the desired position of the effector. The output is the force or the motion that needs to be applied to the actuators in order to minimize the distance with the effector position. This is found by minimizing the constraint equation using Quadratic Programming (QP), i.e. minimizing the violation of the defined constraints.
-
Functional Description:
This plugin builds on the plugin SoftRobots. Inside the plugin, there are some constraint components that are used to describe the robot (effectors, actuators, sensors). An optimisation algorithm is provided to find the efforts to put on actuators in order to place the robot in the closest possible configuration to the one described by “effectors”, or to a state described by “sensors”. This method used to control the soft robots in the task space is patented.
- URL:
- Publications:
-
Contact:
Christian Duriez
-
Participants:
Christian Duriez, Eulalie Coevoet
-
Partner:
CRIStAL
7.1.4 SofaPython3
-
Name:
SofaPython3
-
Keywords:
Python, Numerical simulations, Sofa
-
Functional Description:
This plugin allows to use Sofa as a library from any python3 program. It also allows to write new mechanical component for a Sofa simulation in python3.
-
Release Contributions:
Python3 and SOFA are meeting in one plugin: SofaPython3. In 2020, the integration of this plugin within SOFA opens up new perspectives. Not only can a SOFA simulation be described using a Python script with the embedded Python interpreter, but one or several SOFA instances can now created from a Python environment. Even more powerful, you can create new components (e.g. forcefields) in Python using the bindings provided in the plugin. Python-scripted simulations have no limit anymore!
- URL:
-
Contact:
Hugo Talbot
-
Participants:
Jean-Nicolas Brunet, Damien Marchal, Bruno Marques, Thierry Gaugry, Frédérick Roy, Guillaume Paran, Hugo Talbot
-
Partner:
CRIStAL
7.1.5 Cosserat plugin
-
Keywords:
Physical simulation, Finite element modelling, Soft robotics, Needle insertion, Frictional contact
-
Functional Description:
An open-source plugin, designed to be compatible with the Sofa framework, facilitates the simulation of 1D objects. Specifically, it caters to the modeling of both rigid and flexible 1D entities, like rods, wires or needles, using the Cosserat beam theory. In this context, we have outlined a range of potential applications for this plugin. If you wish to explore its functionality, you have the flexibility to construct scenes using Python or XML, or you can take it a step further by developing new C++ components. We also welcome contributions from the community to enhance and expand the capabilities of this plugin.
## Description related to Soft-body modeling
The Cosserat model has found applications in the realm of continuum robotics, particularly for simulating the deformation of robot bodies with geometries and mechanical properties akin to rods. This model aligns closely with the dynamic deformation patterns exhibited by soft manipulators, as it can effectively replicate nonlinear deformations encompassing bending, torsion, extension, and shearing.
One distinctive feature of Cosserat's theory, within the domain of continuous media mechanics, lies in its conceptualization: it views each material point of an object as a rigid body with six degrees of freedom (three translations and three rotations). In contrast, many other models in continuum media mechanics tend to treat material points as particles with only three translation degrees of freedom.
When modeling linear structures, this framework enables the creation of a structure closely resembling articulated solids, consisting of a series of rigid bodies whose relative positions are defined by their strain states. Consequently, this model serves as a versatile tool for modeling and controlling a variety of systems, including concentric tube robots, continuum robots driven by cables, or pneumatic soft robots with constant cross-sections.
Go into theoretical part of the plugin [Theory](docs/text/Theory.md)
Follow the tutorial : [cosserat_tutorial](docs/text/cosserat_tutorial.md)
- URL:
- Publication:
-
Authors:
Yinoussa Adagolodjo, Christian Duriez, Federico Renda
-
Contact:
Christian Duriez
7.1.6 SofaGym
-
Keywords:
Plugin SOFA, Reinforcement learning, SoftRobots
-
Functional Description:
Software toolkit to easily create an OpenAI Gym environment out of any SOFA scene. The toolkit provides an API based on the standard OpenAI Gym API, allowing to train classical Reinforcement Learning or Planning algorithms.The toolkit also comprises example scenes based on the SoftRobots plugin for SOFA to illustrate how to include SOFA simulations and train learning algorithms on them.
- URL:
- Publication:
-
Authors:
Etienne Menager, Pierre Schegg, Elie Khairallah, Christian Duriez, Damien Marchal
-
Contact:
Christian Duriez
-
Partner:
CRIStAL
7.1.7 SofaCUDALinearSolver
-
Keywords:
Plugin SOFA, Sofa, GPU, CUDA, Linear Systems Solver
-
Functional Description:
A plugin for SOFA providing direct linear solver on GPU. The implementation is based on CUDA and the cuSolver library.
- URL:
-
Author:
Alexandre Bilger
-
Contact:
Alexandre Bilger
7.1.8 SofaGLFW
-
Name:
Simple GUI for SOFA, based on GLFW
-
Keywords:
GUI (Graphical User Interface), Plugin SOFA, Sofa
-
Functional Description:
Integration of GLFW is automatic (automatic fetching and integration with CMake), and linked statically.
This GUI is launchable with the standard runSofa, or can be used with a (provided) stand-alone executable runSofaGLFW (which needs much less dependencies than runSofa)
Lastly, this GUI was designed to support multiple windows in the same time and multiple simulations.
By default, SofaGLFW does not show any user interface. Only the keyboard allows limited interactions with the simulation. That is why a user interface based on Dear ImGui is provided.
Integration of Dear ImGui is automatic (automatic fetching and integration with CMake), and linked statically.
- URL:
-
Authors:
Alexandre Bilger, Hugo Talbot
-
Contact:
Alexandre Bilger
7.2 New platforms
7.2.1 Mobile Trunk
Participants: Alexandre Kruszewski, Damien Marchal, Fabrice Dedo, Antoine Alessandrini.
In the context of the SOMOROB project, we are building a platform composed of a 4-wheels differential mobile robot SummitXL combined with our Echelon deformable trunk.
7.2.2 Virtual Twins
Participants: Christian Duriez, Eulalie Coevoet, Damien Marchal, Fabrice Dedo, Gérald Dherbomez.
Within the nationwide TIRREX Equipex+, the DEFROST team is coordinating the setting up of a virtual desktop solutions to host virtual twins of the physical robotics platform. An experiment was conducted on such a service at the CRISTAL laboratory. The experiment was conclusive, and laboratory allocated a credit line for a deployment in 2023. In the meantime, members of the team have already made several virtual twins demonstrating the capabilities of our simulation framework. The twins are all using SOFA and SoftRobots plugin but are exposed as ROS node so they can be controller in a similar way as the real robots they are modeling.
Endoscope twin
The system is a modular and motorized endoscopy platform consisting of two parts: the patient system and the remote manipulation console. The first part, the patient system, consists of a motorized flexible endoscope, and two motorized flexible surgical instruments, mounted on a mobile platform. The second part, the manipulator console, is a dedicated mobile console used to remotely manipulate the patient system. The main intended application is endoscopic dissection of the submucosa (ESD) in colorectal localization. The digital twin models the whole system using SOFA and the plugins BeamAdapter, SoftRobots, and SofaPython3. The twin is open-source and available at Endoscopy repository.
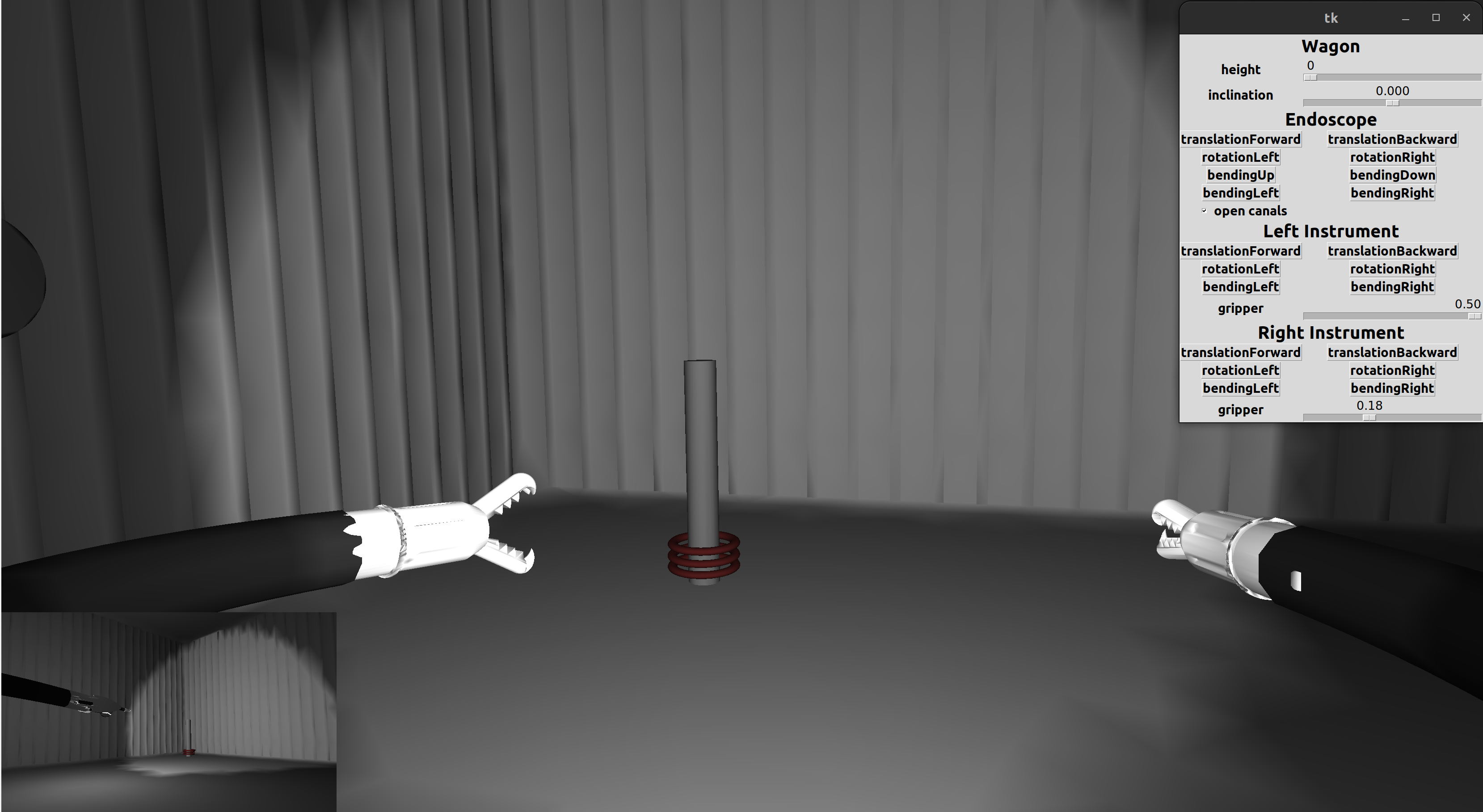
Endoscopic twin in a picking task.
Caroca twin
The system is a large cable-driven parallel robot (CDPR). It is a six degrees of freedom suspended CDPR with eight cables. The current version of the digital twin is a work in progress, it only models a part of the system ; the cables and the coupling with the manipulated object. It uses SOFA and the plugins BeamAdapter, Cosserat and SofaPython3. The twin is open-source and available at Caroca repository.
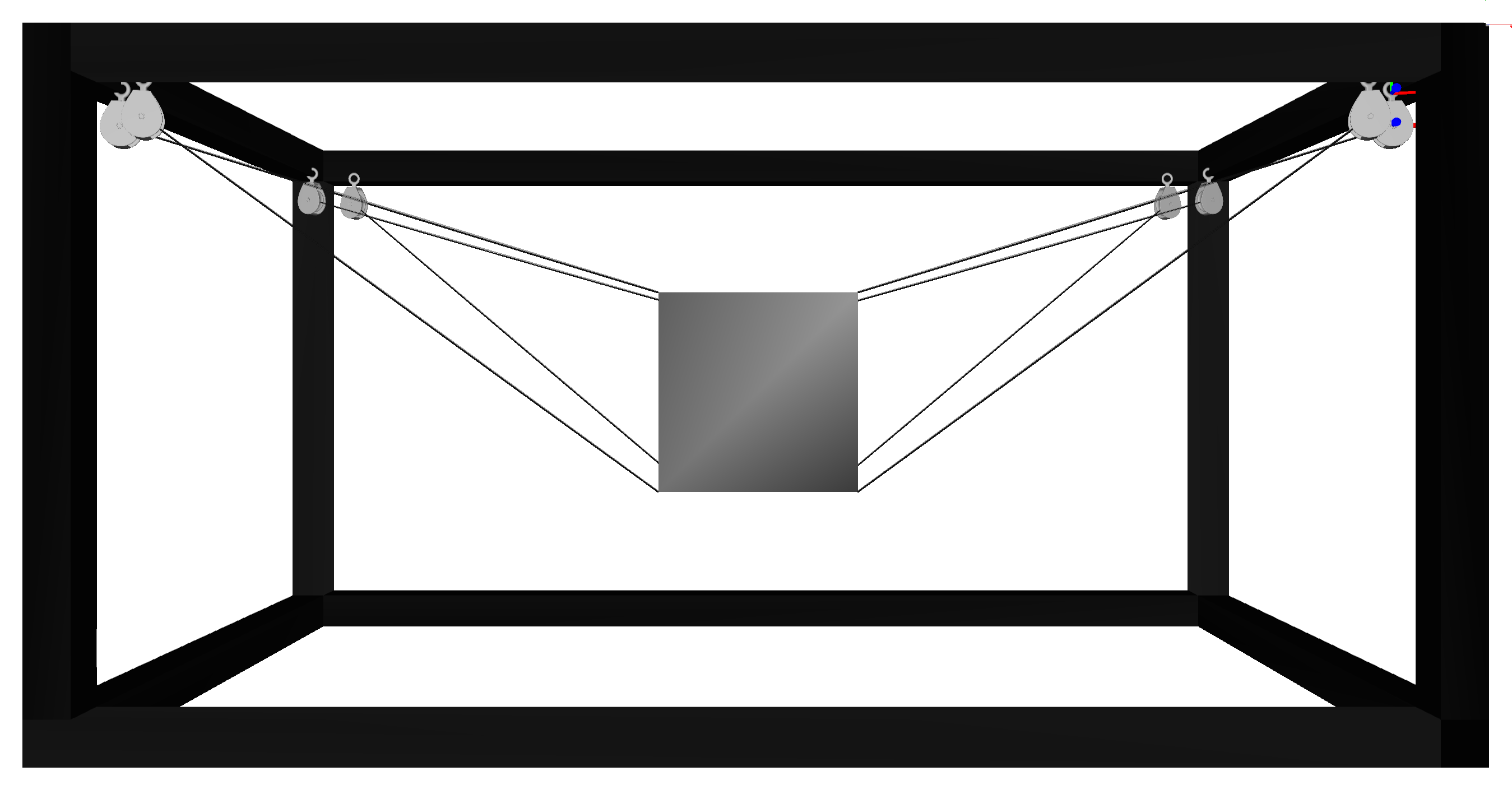
A large cable-driven parallel robot (CDPR) feature six degrees of freedom suspended CDPR with eight cables
Micro Parallel twin
The system is a small parallel continuum robot ; it is composed of four legs connected to a gripper. The digital twin models the whole system using SOFA and the plugins BeamAdapter, SoftRobots, and SofaPython3. The twin is open-source and available at MicroParallel repository.
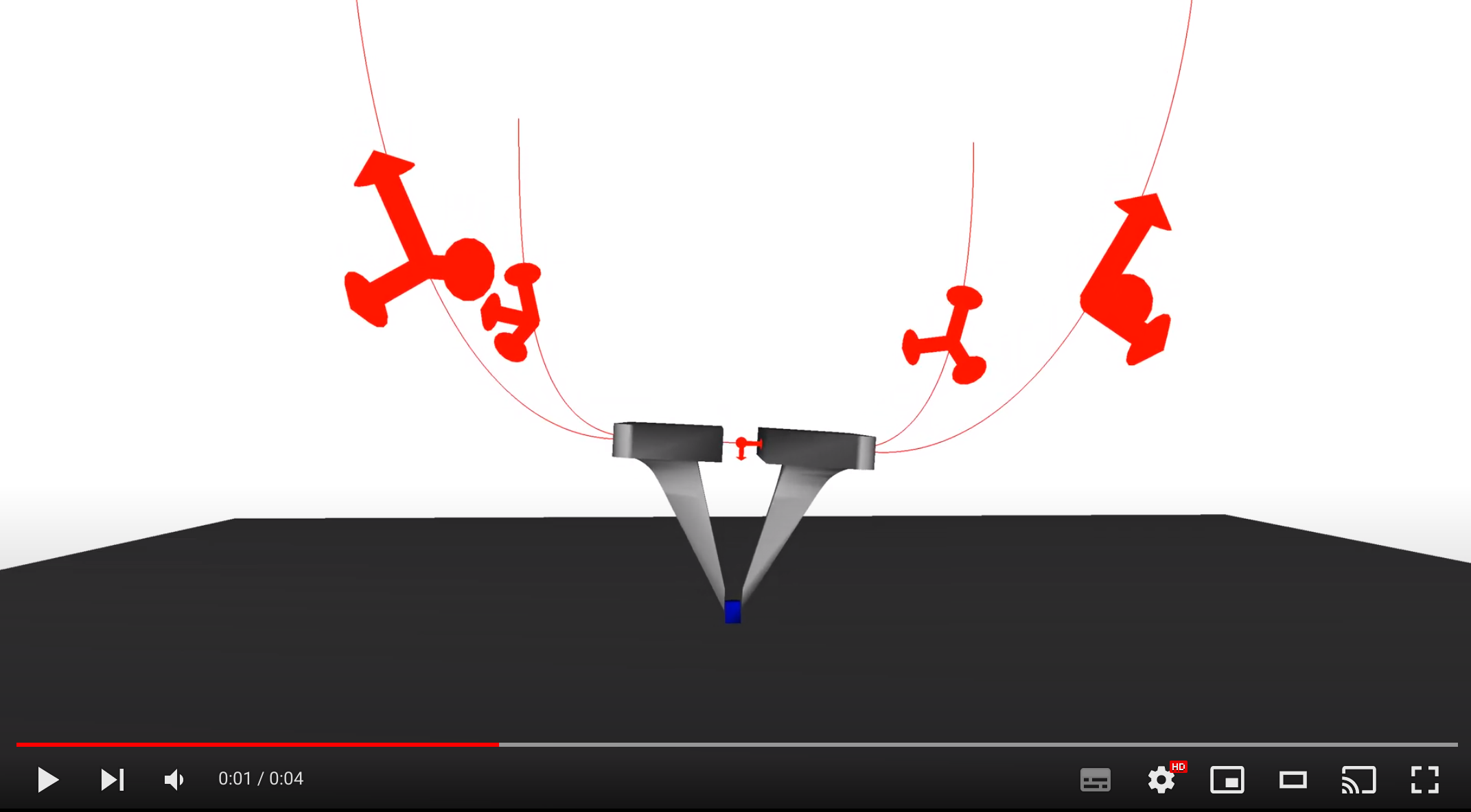
Virtual twin of a the microgripper
MobileTrunk twin
Within the SOMOROB project aforementioned we are fabricating an hardware plateform of a mobile robot with a deformable trunk. A virtual twin for this robot has been made in SOFA. The model of the 4 wheels differential mobile robot follows the same control as the physical one and the Echelon deformable trunk is controlled using SoftRobots.Inverse. The twin is open-source and available at MobileTrunk repository.
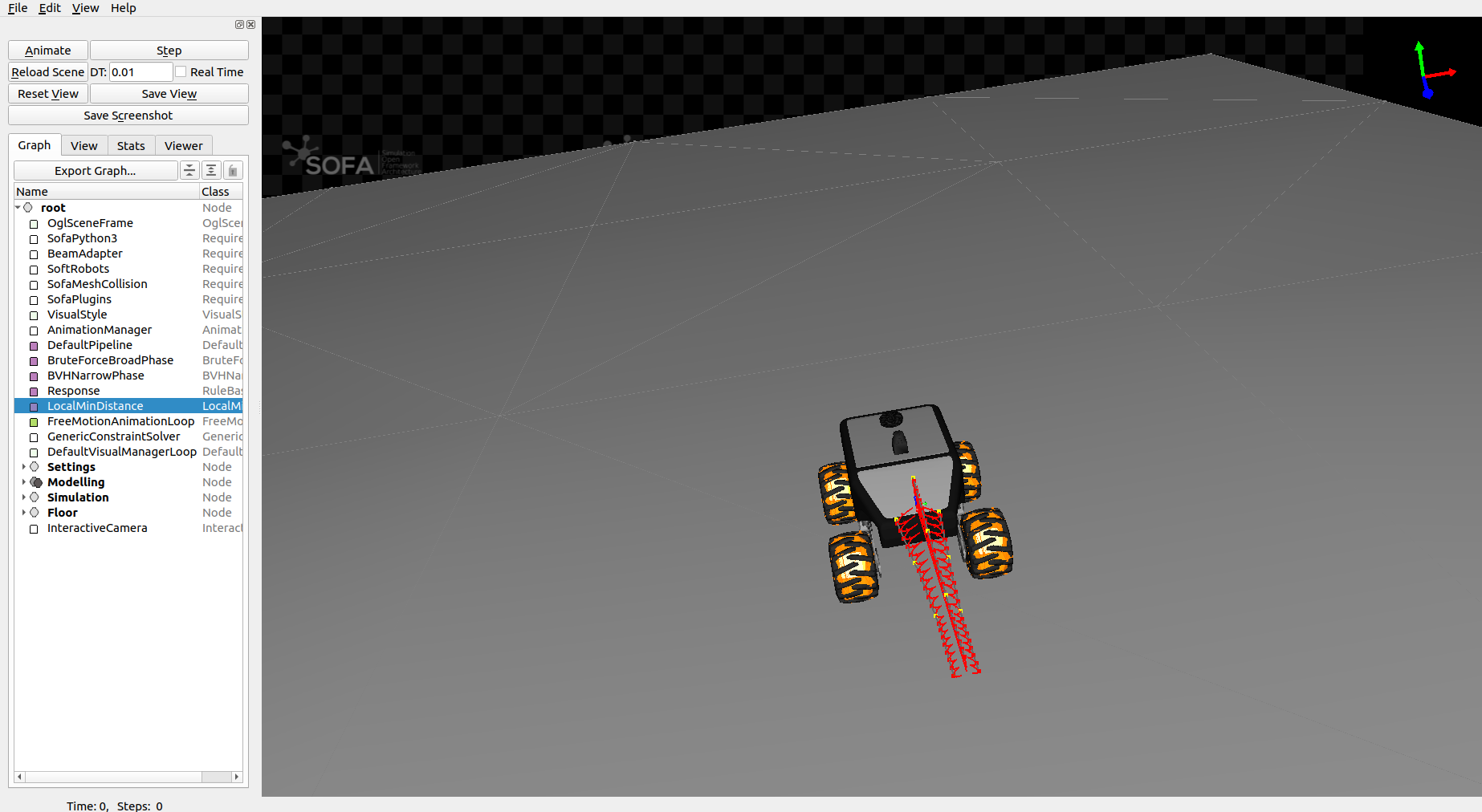
Image showing an interactive four wheel robots with a deformable trunk.
8 New results
8.1 Towards the use of proxies for efficient learning manipulation and locomotion strategies on soft robots
Participants: Etienne Ménager, Quentin Peyron, Christian Duriez.
Soft robots are naturally designed to perform safe interactions with their environment, like locomotion and manipulation. In the literature, there are now many concepts, often bio-inspired, to propose new modes of locomotion or grasping. However, a methodology for implementing motion planning of these tasks, as exists for rigid robots, is still lacking. One of the difficulties comes from the modeling of these robots, which is very different, as it is based on the mechanics of deformable bodies. These models, whose dimension is often very large, make learning and optimization methods very costly. In this letter 22, we propose a proxy approach, as exists for humanoid robotics. This proxy is a simplified model of the robot that enables frugal learning of a motion strategy. This strategy is then transferred to the complete model to obtain the corresponding actuation inputs. Our methodology is illustrated and analyzed on two classical designs of soft robots doing manipulation and locomotion tasks.
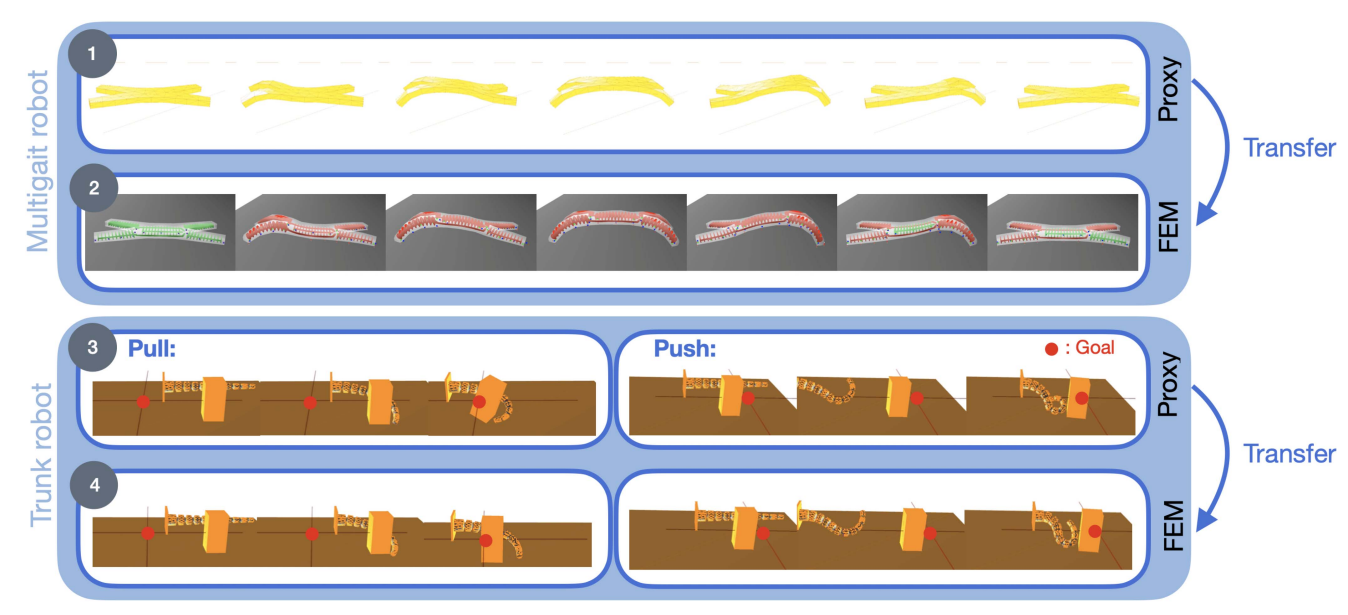
An image showing: Example of strategy obtained on the proxy model and transferred to the complete model in the case of multigait and trunk robots.
8.2 Modeling and Control of a 5-DOF Parallel Continuum Haptic Device
Participants: Margaret Koehler, Thor Morales Bieze, Alexandre Kruszewski, Allison Okamura, Christian Duriez.
In this work 16, we propose a new continuum robotics approach for haptic rendering and comanipulation. This approach is illustrated using a robotic interface with six motorized fixed axes connected by deformable beams, in parallel, to an end effector with 5 degrees of freedom. Apart from the rotation of the motors, this design has no articulation, and the motion of the end effector is achieved by deformation of the beams. The flexible beams are equipped with bending sensors, and the motors have encoders. We use a nonlinear finite element mechanical model of the robot based on a mesh of beam elements that is computed in real time at 20 Hz. The bending sensors are incorporated into the model, which allows us to obtain an accurate estimate of the force exerted by the user on the end effector. The model enables a new methodology for calculating the workspace of the continuum haptic device. The model also is propagated to a higher frequency loop (500 Hz), which performs sensing and control of the robot at high rates, using an admittance-type control to command new positions of the actuators. We show that this control methodology allows haptic rendering of virtual walls that are stiffer than the natural stiffness of the robot. Finally, we demonstrate the use of the device for simple comanipulation tasks.
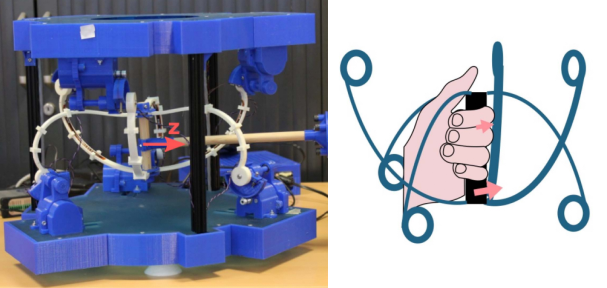
An image showing: Left: prototype of soft haptic device composed of 6 flexible beams actuated in rotation at their base. Right: Principle of manipulation.
8.3 Piecewise Linear Strain Cosserat Model for Soft Slender Manipulator
Participants: Haihong Li, Lingxiao Xun, Gang Zheng.
Recently soft robotics has rapidly become a novel and promising area of research with many designs and applications due to their flexible and compliant structure. However, it is more difficult to derive the nonlinear dynamic model of such soft robots. The differential kinematics and dynamics of the soft manipulator can be formulated as a set of highly nonlinear partial differential equations (PDEs) via the classic Cosserat rod theory. In this work 20, we propose a discrete modeling technique named piecewise linear strain (PLS) to solve the PDEs of Cosseratbased models, based on which the associated analytic models are deduced. To validate the accuracy of the proposed Cosserat model, the static model of the conical cantilever rod under gravity as a simple example is simulated by using different discretization methods. Results indicate that PLS Cosserat model is comparable to the mechanical deformation behavior of real-world soft manipulator. Finally, a parameters identification scheme for this model is established, and the simulation as well as experimental validation demonstrate that using this method can identify the model physical parameters with high accuracy.
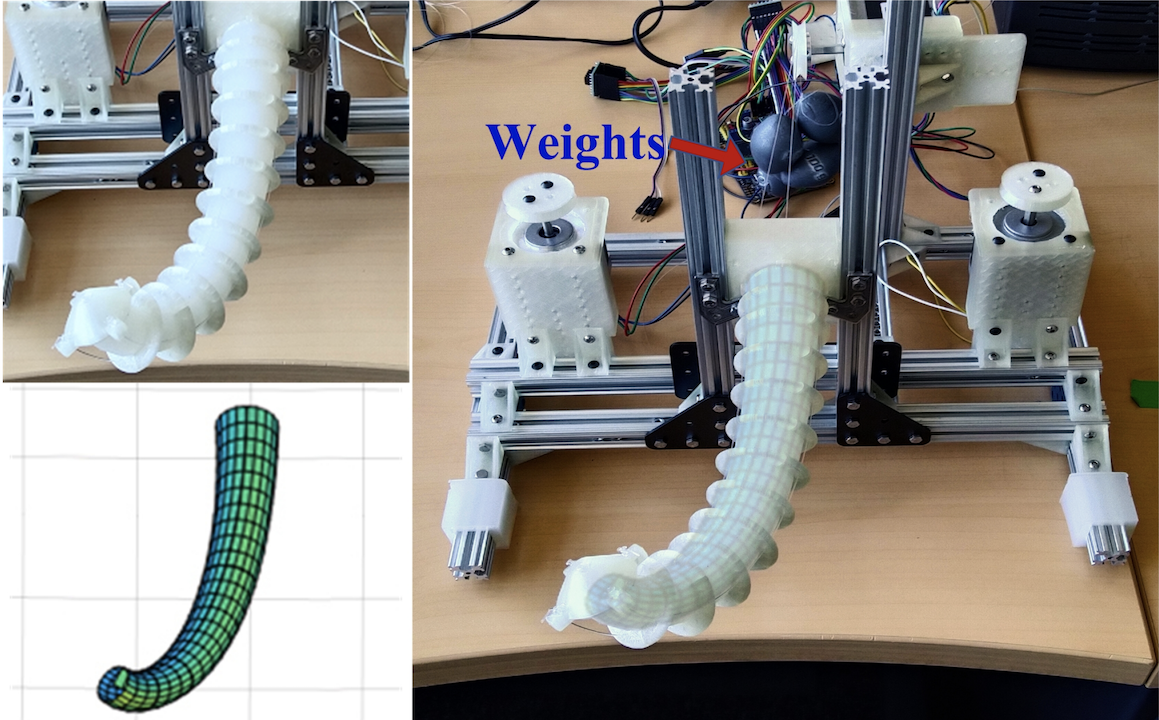
An image showing: Configuration comparison between simulation and experiment under gravity and different cables’ tension.
8.4 Modeling and Control of Conducting Polymer Actuator
Participants: Lingxiao Xun, Gang Zheng, Alexandre Kruszewski, Christian Duriez.
Conducting polymer actuator has nonlinear dynamic characteristics during its charge process. In this study 27, we proposed an electromechanic model and an optimal controller for a type of ionic electroactive polymer (IEPA) actuator with sub-millimeter scale, which can produce large deformation under low actuation voltage. The electronic model is to describe the evolution of charge state in time domain. The mechanic model is to calculate the deformation of conducting polymer actuator under the actuation force and external force. Based on the electromechanic coupling model, a parameter identification method is proposed to estimate the nonlinear parameter of conducting polymer actuator. The experiments show that our electromechanic model successfully predicts the deformation of actuator under different input voltages with the identified parameters. In the last step, an optimal controller is designed to control the orientation of IEAP actuator, which achieves at a high control performance in our experiments. The success of the modeling and control lays the foundation work for the subsequent biomedical applications.
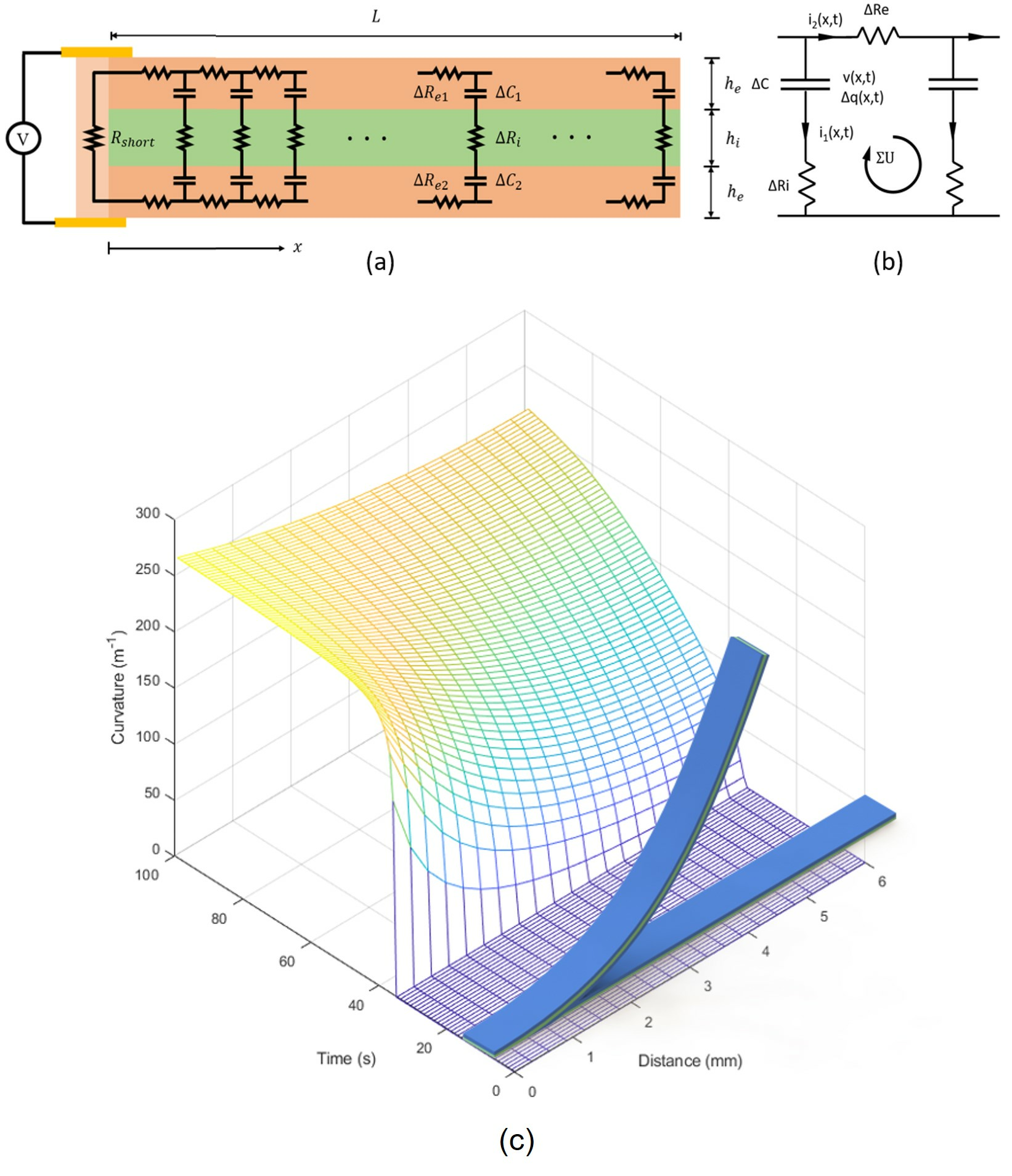
An image showing: Electric-mechanic coupling model for predicting deformation of the conducting polymer
8.5 Discrete Cosserat Static Model-Based Control of Soft Manipulator
Participants: Haihong Li, Lingxiao Xun, Gang Zheng.
In this work 21, the continuous Cosserat static model is re-formulated by employing the piecewise linear strain (PLS) approach, which can obtain the analytic formula of the model to facilitate the controller design. The robust closed-loop control architecture based on the PLS Cosserat static model for the soft arm around its workspace is then established. To validate the performance of the proposed model-based control scheme, the point-to-point and time-varying trajectory tracking experiments under external disturbances have been conducted on the soft manipulator actuated by cables.
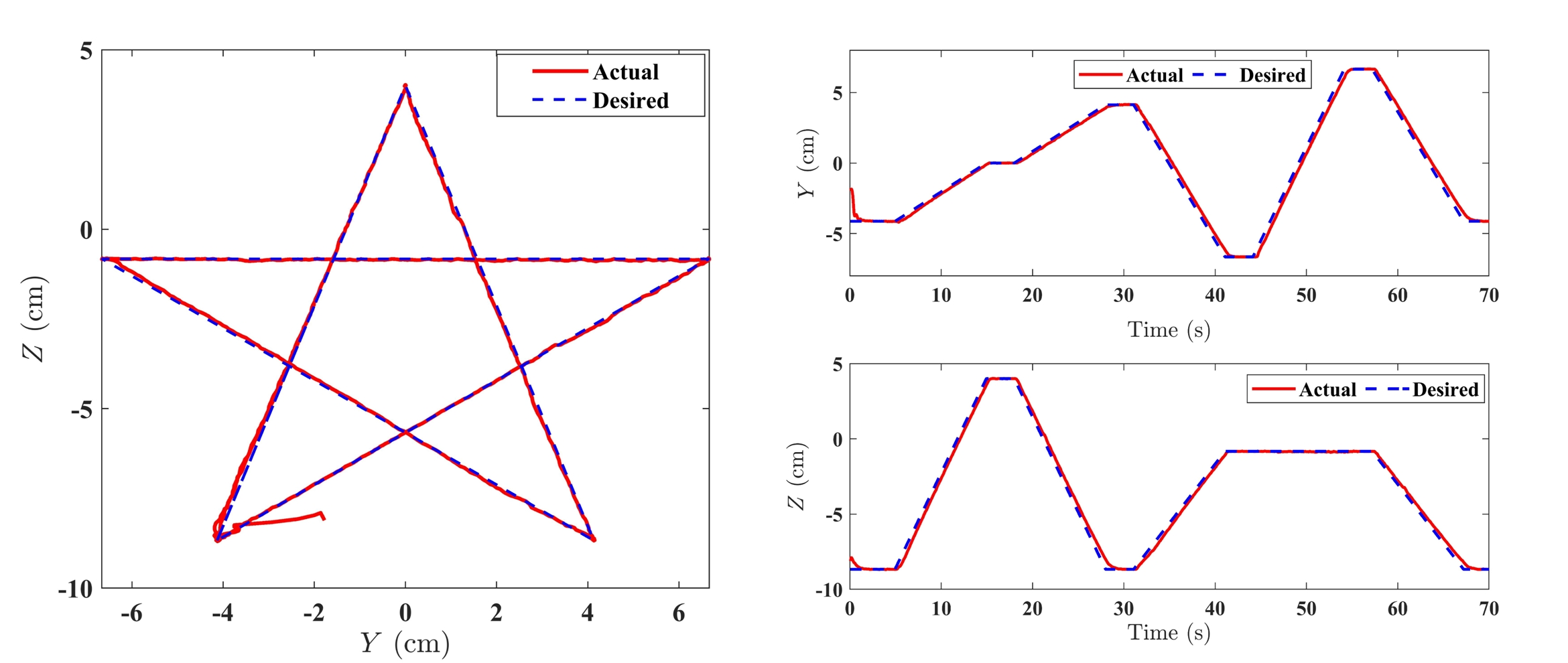
Time-varying star-shaped trajectory tracking by applying the proposed controller
8.6 Global Control of Soft Manipulator by Unifying Cosserat and Neural Network
Participants: Haihong Li, Lingxiao Xun, Gang Zheng.
Soft manipulators, a relatively novel class of robots, are increasingly prevalent in the field of robotics. Due to the material nonlinearity and the absence of links and joints which are typically used to derive their kinematics and dynamics, the exact modeling and effective control frameworks of such soft robots are much more difficult than the traditional rigid counterparts. To achieve global control of the end-effector position of the soft manipulator actuated by cables, this work 19 proposes a hybrid control strategy by unifying the piecewise linear strain (PLS) Cosserat model and radial basis function neural network (RBFNN) to approximate the Jacobian matrix of any end-effector position in the whole workspace, and then designs a global control scheme based on the approximation of Jacobian matrix. The theoretical convergence proof and experimental validation are provided for the designed global controller. The results corroborate that the proposed control strategy has excellent accuracy and robustness in tracking desired time-varying trajectories through different experiments.
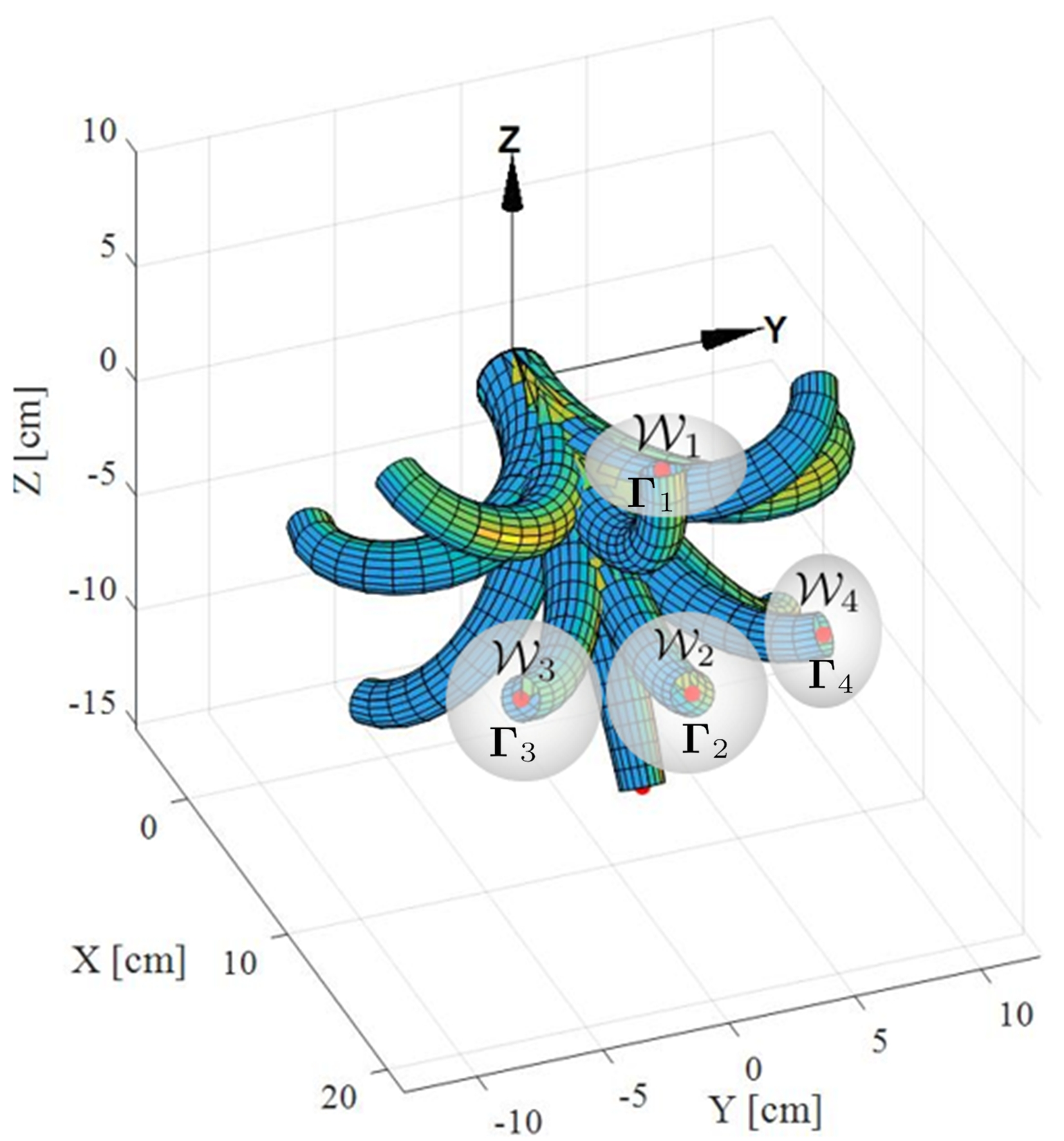
An image showing: Sub-workspaces and their associated configurations for the soft manipulator which are used for neural network to approximate the global controller.
8.7 Constraint-based simulation of passive suction cups
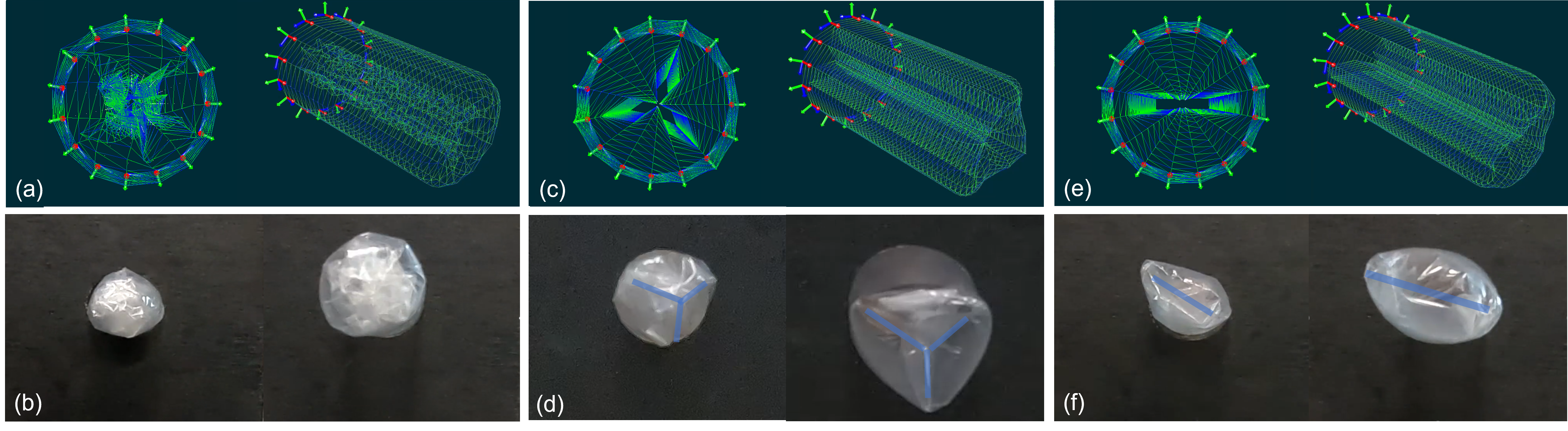
Participants: Eulalie Coevoet, Christian Duriez.
In this contribution 13, we propose a physics-based model of suction phenomenon to achieve simulation of deformable objects like suction cups. Our model uses a constraint-based formulation to simulate the variations of pressure inside suction cups. The respective internal pressures are represented as pressure constraints which are coupled with anti-interpenetration and friction constraints. Furthermore, our method is able to detect multiple air cavities using information from collision detection. We solve the pressure constraints based on the ideal gas law while considering several cavity states.

Image showing a simulation of an octopus tentacle lifts a can using its suction cups.
8.8 Automated Planning for Robotic Guidewire Navigation in the Coronary Arteries
Participants: Pierre Schegg, Jeremie Dequidt, Eulalie Coevoet, Christian Duriez.
Soft continuum robots, and comparable instruments allow to perform some surgical procedures non-invasively. While safer, less morbid and more cost-effective, these medical interventions increase the complexity for the practitioners: the manipulation of anatomical structures is indirect through telescopic and flexible devices and the visual feedback is indirect through monitors. Interventional cardiology is an example of complex procedures where catheters and guidewires are manipulated to reach and treat remote areas of the vascular network. Such interventions may be assisted with a robot that will operate the tools but the planning (choice of tools and trajectories) remains a complex task. In this paper we use a simulation framework for flexible devices inside the vasculature and we propose a method to automatically control these devices to reach specific locations. Experiments performed on 15 patient geometries exhibit good performance. Automatic manipulation reaches the goal in more than 90% of the cases.
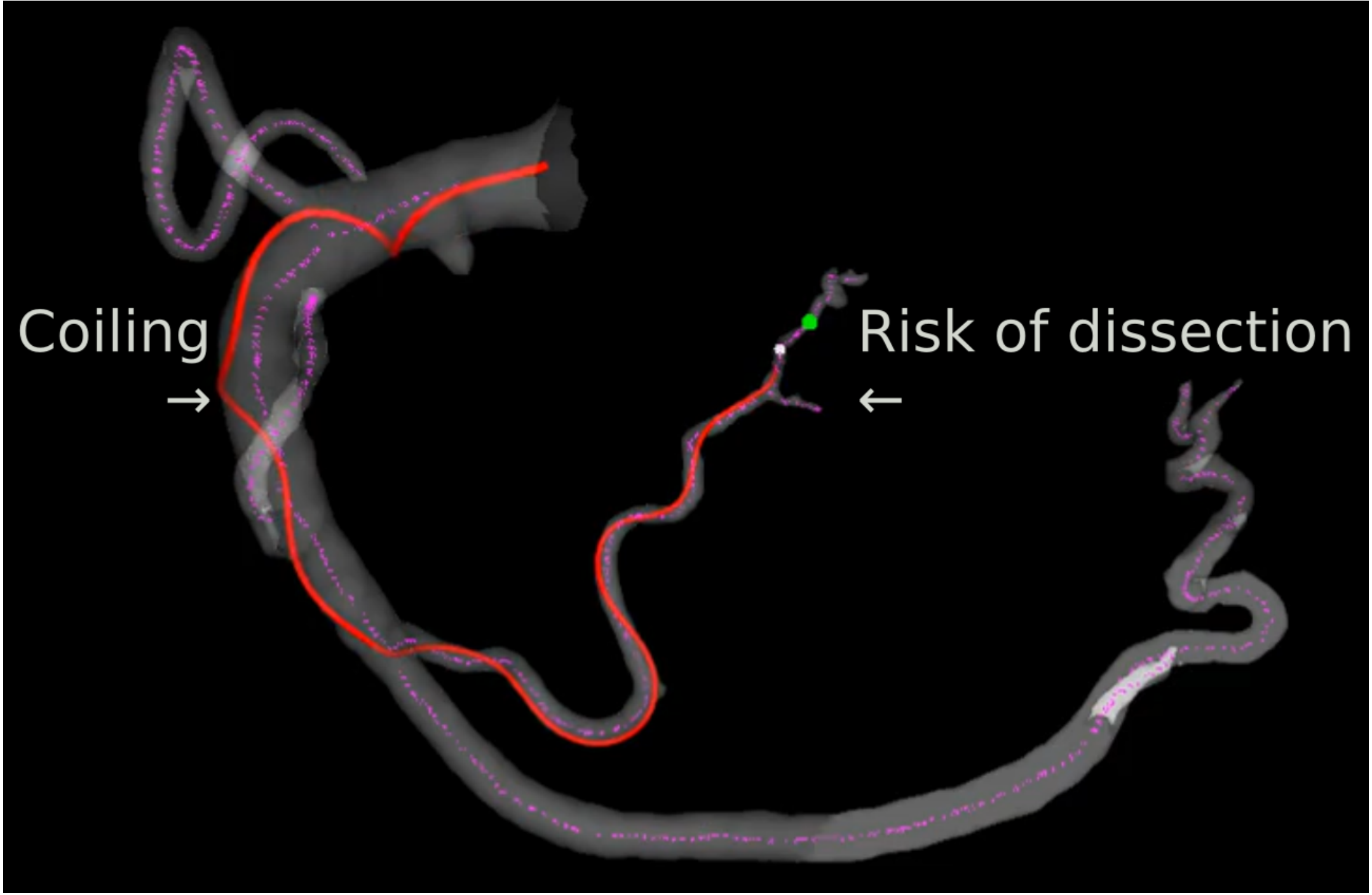
Image showing simulation involving robotic guidewire
8.9 Simulation of a growing robot
Participants: Flavie Przybylski, Yinoussa Adagolodjo, Anna Mira, Giulio Cerruti, Jérémie Dequidt, Christian Duriez, Pierre Berthet-Rayne.
Growing robots and their eversion principle have wide applications ranging from surgery to industrial inspection and archaeology. The eversion process involves deploying an inflatable device with a material located at the tip of the robot, which, when under pressure, elongates the robot’s body. However, the simulation of this complex kinematic phenomenon is a significant challenge. Our approach proposes to use a combination of kinematics and quasi-static modeling to parameterize the starting conditions of the eversion process. This facilitates the understanding of the behavior of this complex kinematic phenomenon and help identify factors that have a significant impact on the eversion process and its response to external factors. The kinematic model uses the Cosserat rod models for local coordinates, while the quasi-static model is based on finite element analysis. The two models are combined to capture the behavior of the robot tip during eversion. This approach has been implemented and tested using the SOFA framework and has been evaluated on the deployment of a vine robot on a narrow passage. The results of our approach are encouraging to better understand the behavior of soft growing robot during eversion.
Simulation of different everting robots (top) compared to real ones (bottom).
8.10 Visadapt: Catadioptric Adaptive Camera
Participants: Julien Ducrocq, Guillaume Caron, Hervé Midavaine, Christian Duriez, Jeremie Dequidt, El Mustapha Mouaddib.
This result 15 describes the design method of a multi-resolution camera, named Visadapt. It is made of a conventional compact camera with a sensor and a lens pointed to a new deformable mirror so that the mirror at flat state is parallel to the image plane. The main novelty of the latter mirror is the ability to control automatically strokes of several millimeters. This allows Visadapt to capture scenes with a spatially variable density of visual information. A grid of linear actuators, set underneath the mirror surface, deforms the mirror to reach the desired shape computed to capture several areas of different resolutions. Mechanical simulations allowed to iterate on Visadapt’s design, to reduce the geometrical distortions in the images. Evaluations made on an actual prototype of Visadapt show that, by adapting the mirror shape, this camera can magnify a scene object up to 20%, even off-centered in the field-of-view, while still perceiving the rest of the scene.
8.11 Reduced finite element modelling and closed-loop control of pneumatic-driven soft continuum robots
Participants: Paul Chaillou, Jialei Shi, Alexandre Kruszewski, Christian Duriez, Helge Wurdemann, Isabelle Fournier.
The introduction of soft robots has led to the development of inherently safe and flexible interventional tools for medical applications, when compared to their traditionally rigid counterparts. In particular, robot-assisted surgery is one of the medical applications that benefits from the inherent properties of soft instruments. However, robust control and reliable manipulation of soft tools remain challenging. In this paper, we present a new method based on reduced finite element method model and closed-loop inverse kinematics control for a fiber-reinforced soft robot. The highly flexible, pneumatically driven soft robot has three fully fiber-reinforced chamber pairs. The outer diameter is 11.5 mm. An inner working channel of 4.5 mm provides a free lumen for in-vivo cancer imaging tools during minimally invasive interventions. Here 32, the manipulator is designed in order to retrieve a tissue biopsy which can then be investigated for cancerous tissue. Simulation and experimental results are compared to validate the model and control methods, using one-module and two-module robots. The results show a real-time control is achievable using the reduced model. Combing the closed-loop control, the median position tracking errors are generally less than 2 mm.
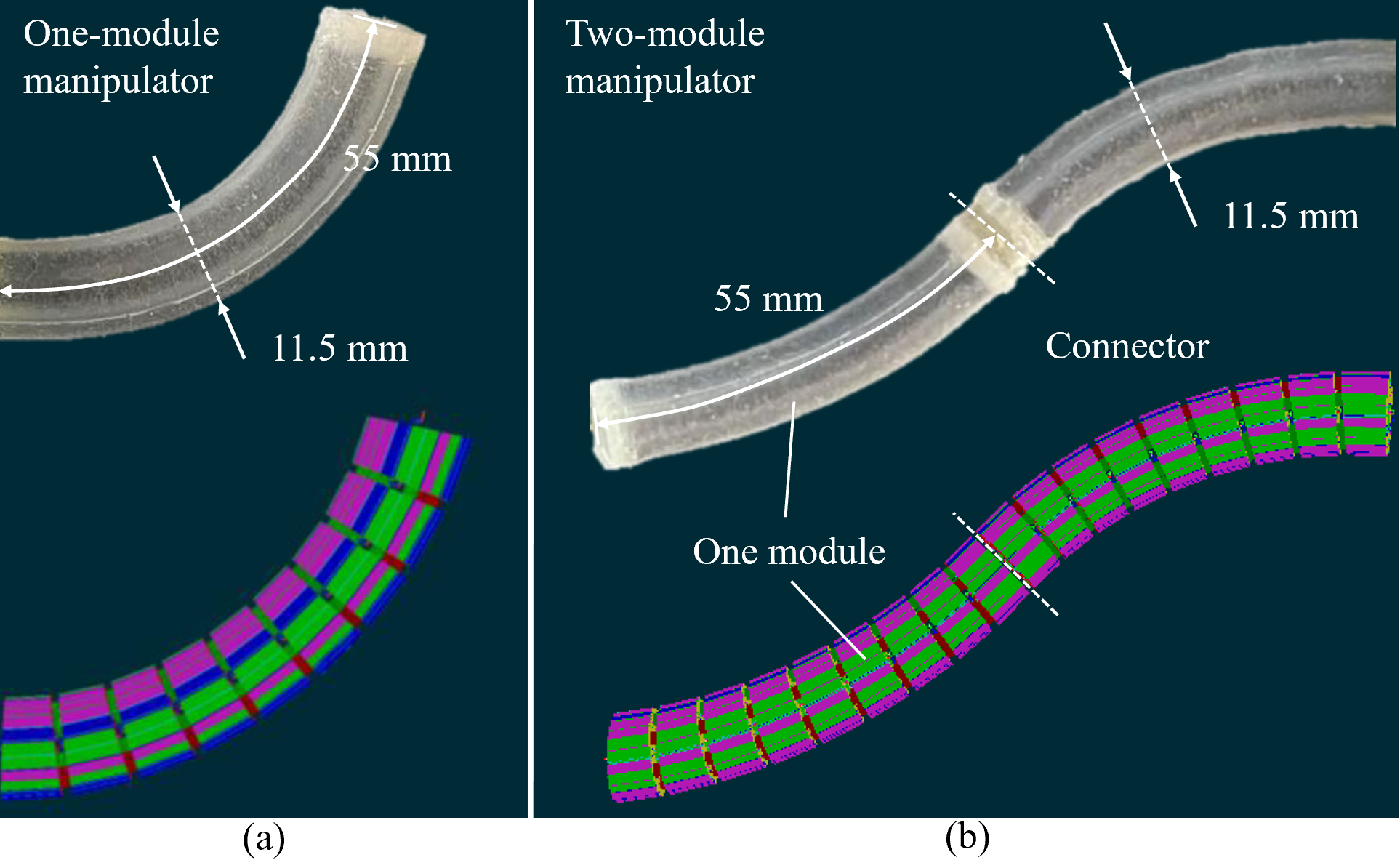
The physical (top) and modelled (bottom) (a) one-module and (b) two-module soft manipulators in SOFA.
8.12 Stability analysis of tendon driven continuum robots and application to active softening
Participants: Quentin Peyron, Jessica Burgner-Kahrs.
Tendon driven continuum robots are often considered to navigate through and operate in cluttered environments. While their compliance allows them to conform safely to obstacles, it leads them also to buckle under tendon actuation. In this article 23, we perform for the first time an extensive elastic stability analysis of these robots for arbitrary planar designs. The buckling phenomena are investigated and analyzed using bifurcation diagrams, complementing the current state of the art and adding new knowledge about robots composed of n spacer disks. We show the existence of multiple robot configurations with different shapes, achievable with the same actuation inputs. A global stability criterion is also established, which links the critical tendon force, until which the robot is stable to the design parameters. Finally, the buckling phenomena are used to actively soften the robot for a better compromise between compliance and payload. An open loop control strategy is proposed, which can theoretically decrease the stiffness to zero, while maintaining the same robot shape. Experimentally, the robot is made four times more compliant than it is nominally using tendon actuation only.
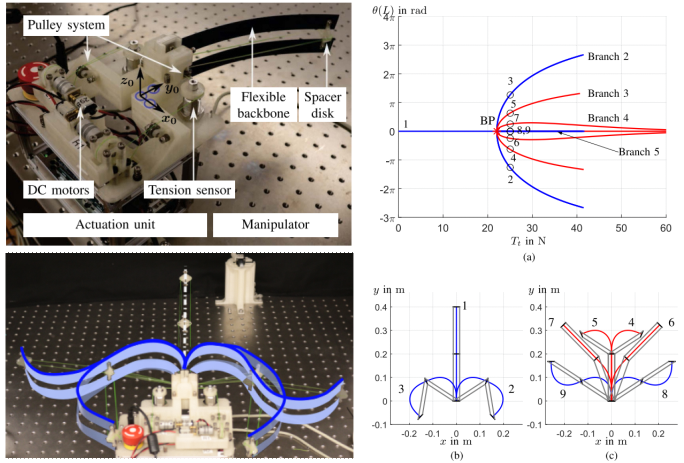
An image showing: The considered prototype of tendon driven continuum robot and the associated stability analysis with bifurcation diagrams
8.13 An Open Source Design Optimization Toolbox Evaluated on a Soft Finger
Participants: Stefan Escaida Navarro, Tanguy Navez, Olivier Goury, Luis Molina, Christian Duriez.
In this paper (A CITER), we introduce a novel open source toolbox for design optimization in Soft Robotics. We consider that design optimization is an important trend in Soft Robotics that is changing the way in which designs will be shared and adopted. We evaluate this toolbox on the example of a cable-driven, sensorized soft finger. For devices like these, that feature both actuation and sensing, the need for multi-objective optimization capabilities naturally arises, because at the very least, a tradeoff between these two aspects has to be found. Thus, multiobjective optimization capability is one of the central features of the proposed toolbox. We evaluate the optimization of the soft finger and show that extreme points of the optimization trade-off between sensing and actuation are indeed far apart on actually fabricated devices for the established metrics. Furthermore, we provide an in depth analysis of the sim-to-real behavior of the example, taking into account factors such as the mesh density in the simulation, mechanical parameters and fabrication tolerances.
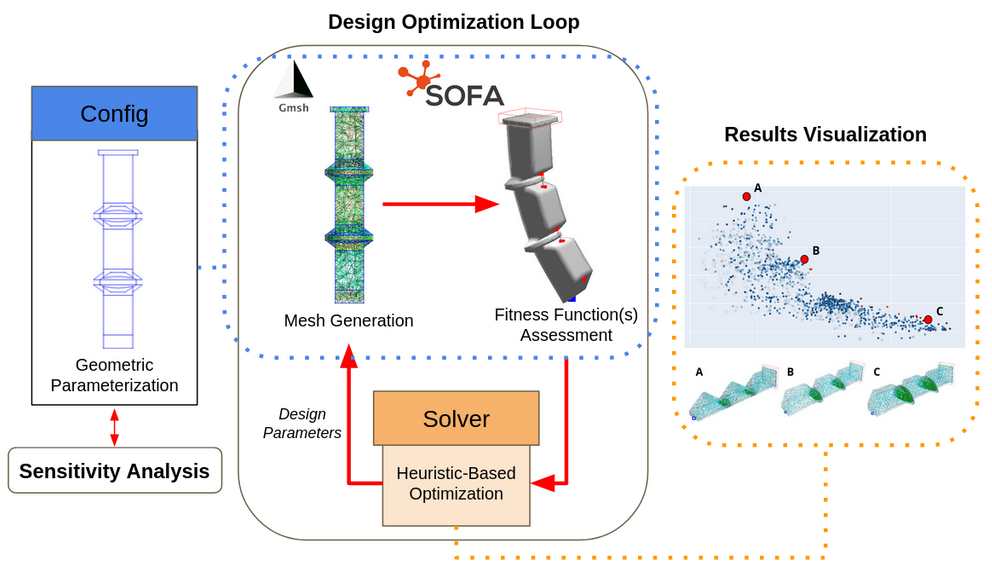
The Design Optimization Toolbox is based on fully parametric description of soft robotics devices coupled to the simulation framework SOFA. Users can implement their own Config class describing a generic design and multiple fitness functions. Volumetric meshes are generated using the Python API of Gmsh, allowing to evaluate the optimization objectives within a SOFA simulation. A sensitivity analysis feature enables exploring relationships between objectives and design parameters. Heuristic-based algorithm are implemented through the Solver class for efficiently exploring the Pareto Front in the design space.
8.14 Direct and inverse modeling of soft robots by learning a condensed FEM model
Participants: Etienne Ménager, Tanguy Navez, Olivier Goury, Christian Duriez.
The Finite Element Method (FEM) is a powerful modeling tool for predicting the behavior of soft robots. However, its use for control can be difficult for non-specialists of numerical computation: it requires an optimization of the computation to make it real-time. In this paper, we propose a learning-based approach to obtain a compact but sufficiently rich mechanical representation. Our choice is based on nonlinear compliance data in the actuator/effector space provided by a condensation of the FEM model. We demonstrate that this compact model can be learned with a reasonable amount of data and, at the same time, be very efficient in terms of modeling, since we can deduce the direct and inverse kinematics of the robot. We also show how to couple some models learned individually in particular on an example of a gripper composed of two soft fingers. Other results are shown by comparing the inverse model derived from the full FEM model and the one from the compact learned version. This work opens new perspectives, namely for the embedded control of soft robots, but also for their design. These perspectives are also discussed in the paper.
9 Bilateral contracts and grants with industry
9.1 Bilateral grants with industry
9.1.1 Caranx Medical
Caranx Medical is a startup company focusing on surgical robotics. Their aim is to revolutionize surgery with novel ground-breaking surgical robots. We have started a PhD thesis in Feb 2022 through the CIFRE program. The phD is focused on the use of vine robots in surgical robotics. We are working on a new model for everything robots. We had a paper accepted to Robosoft this year
Participant: Christian Duriez, Jeremie Dequidt, Flavie Przybylski.
10 Partnerships and cooperations
10.1 International initiatives
10.1.1 Participation in other International Programs
We have obtained a grant Samuel de Champlain for a collaboration with the team of Sampada Bodkhe, Ecole Polytechnique de Montréal. The topic is about design optimization of soft robots.
Participant: Navez Tanguy, Nathanaël Haas, Goury Olivier, Christian Duriez.
10.2 International research visitors
10.2.1 Visits of international scientists
- Pasquale Ferrentino
-
Status
PhD student
-
Institution of origin:
VUB
-
Country:
Belgium
-
Dates:
From May 2023 to August 2023
-
Context of the visit:
Collaboration on the modeling of viscoelastic phenomena in soft pneumatic actuators composed of self-healing polymers.
-
Mobility program/type of mobility:
Research stay
10.3 European initiatives
10.3.1 H2020 projects
SimCardioTest
-
Title:
SimCardioTest
-
Duration:
From 2021 to 2024
-
Partners:
- INSTITUT NATIONAL DE RECHERCHE EN INFORMATIQUE ET AUTOMATIQUE (INRIA), France
- UNIVERSITE DE BORDEAUX (Ubx), France
- UNIVERSITAT POMPEU FABRA (UPF), Spain
- UNIVERSITAT POLITECNICA DE VALENCIA (UPV), Spain
- SIMULA RESEARCH LABORATORY AS (SRL), Norway
- INSILICOTRIALS TECHNOLOGIES SPA (IST), Italy
- SORIN CRM SAS (MPC), France
- EXACTCURE (EXC), France
- BOSTON SCIENTIFIC SCIMED INC (BSC), United States
- VIRTUAL PHYSIOLOGICAL HUMAN INSTITUTE FOR INTEGRATIVE BIOMEDICAL RESEARCH VZW (VPHi), Belgium
-
Inria contact:
Christian Duriez
-
Coordinator:
Maxime Sermesant
-
Summary:
The SimCardioTest project aims at developping numerical models of different medical interventions related to heart diseases for in-silico trials. These trials are performed in simulation and have the potential to improve the proceedures outcome and to decrease animal testing. The Defrost team is involved in one medical intervention consisting in placing catheter leads inside the heart ventricles using catheters. In particular, we are developing a numerical model of the catheter deployment into the vasculature and the ventricle. We are also contributing to the design of a robotic phantom of beating ventricle to validate the numerical model experimentally.
10.4 National initiatives
ROBOCOP:
Participants: Lingxiao Xun, Yinoussa Adagolodjo, Olivier Goury, Christian Duriez, Alexandre Kruszewski, Gang Zheng.
Robotization of Cochlear implant. This is a 5-year project, supported by the ANR (French National Agency for Research) in the framework of PRCE, starting from 1 October 2019 until 30 September 2024. ROBOCOP aims at creating a new prototype of cochlear implant, and robotize (i.e. actuate and control) its insertion process to facilitate the work of surgeon, to increase the success ratio, and to decrease the probability of trauma.
COSSEROOTS:
Participants: Yinoussa Adagolodjo, Olivier Goury, Christian Duriez, Gang Zheng.
Cosserat Rod Theory for Slender Robots. This is a 4 year project, supported by the ANR (French National Agency for Research) in the framework of PRC, starting from 1 November 2020 until 31 October 2024. The objective of COSSEROOTS project is to systematically investigate the relative parameterization modeling technique in order to create for the first time a toolbox dedicated to modeling and control of slender, flexible, continuous, bio-inspired robots that can undergo large, controlled deformations. associated GitHub project.
ADT Plan IA:
Participants: Alexandre Bilger, Damien Marchal, Christian Duriez.
The simulation of soft-robots is a growing field since it is a way to virtually train AI algorithms in taking decisions. To tackle this challenge, accurate modeling the interactions of the robots with their environment is key. This is already possible today, but at the cost of a (too) long calculation time or a significant simplification of the environment. An ADT started this year to modernize the matrix assembly in SOFA and to bring the solving algorithms up to standard. Results of this work are already visible in the latest SOFA release (v21.12) and its advances can be followed on the associated GitHub project.
ANR Equipex+ TIRREX:
Participants: Christian Duriez, Damien Marchal, Gang Zheng.
TIRREX project aims to develop new emblematic platforms in robotics with a national coordination for their access and development. The project brings together all the major players in French academic research in robotics (CNRS, INRIA, CEA, INRAE) with 19 partners. It is structured around 6 thematic axes: Humanoid Robotics, XXL Robotics, Micro-Nano Robotics, Autonomous Terrestrial Robotics, Aerial Robotics and Medical Robotics, and transversal axes: Prototyping & Design, Manipulation, and open Infrastructure. Christian Duriez is co-responsible of the axis open Infrastructure, in particular for the development of digital twins.
PEPR-O2R:
Participants: Christian Duriez, Quentin Peyron, Jeremie Dequidt.
O2R is a national initiative that involves french major laboratories in robotics and will last 8 years starting from Jan. 2024. The focus of this ambitious program is to investigate three scientific challenges: Understanding determinants for social adaptation of robots and their links with robotic decisions and design choices; Creating integrated robot hardware and software architectures, to enable embodied intelligence and robustness faced with the complexity of their exercise and use environments; Endowing robots with capabilities for fluid interaction with humans, to favor social integration. Within this program, DEFROST is very active through two specific actions: the first one being material, architecture and embodied intelligence and the second one about simulation tools for multiphysics, multiscale robots.
11 Dissemination
11.1 Promoting scientific activities
11.1.1 Scientific events: selection
Member of the conference program committees
- Jeremie Dequidt is a PC member of ISVC and jFIG conferences
Reviewer
- Jeremie Dequidt was a reviewer for IEEE ICRA and ROBIO conferences
- Quentin Peyron was a reviewer for IEEE RoboSoft, IEEE ICRA and IEEE IROS conferences
- Yinoussa Adagolodjo was a reviewer for IEEE RoboSoft, IEEE ICRA and IEEE IROS conferences.
- Christian Duriez was reviewer for ACM Siggraph Asia
11.1.2 Journal
Member of the editorial boards
- Christian Duriez is associate editor of Robotics and Automation Letters (RAL)
- Gang Zheng is associate editor of IET Cyber-Systems and Robotics
Reviewer - reviewing activities
- Alexandre Kruszewski was reviewer for Fuzzy sets and systems, IEEE T-ASE and IEEE T-RO journals.
- Jeremie Dequidt was a reviewer for IEEE RA-L and Computer & Graphics journals
- Quentin Peyron was a reviewer for IEEE RA-L, IEEE T-RO, IEEE T-Mech and IJRR journals.
- Yinoussa Adagolodjo was a reviewer for IEEE T-RO, IEEE Robotics and Automation Letters (RA-L) joournals.
- Christian Duriez was a reviewer for SORO journal and Nature Communications
11.1.3 Invited talks
- Quentin Peyron was invited to give a talk entitled "Modeling,analysis and preliminary design of slender continuum robots" at the FEMTO-ST laboratory, AS2M Department, in Besançon, France.
11.1.4 Leadership within the scientific community
- Christian Duriez is co-director of the PEPR O2R (CNRS/Inria/CEA) for Inria
11.1.5 Scientific expertise
- Alexandre Kruszewski was a jury member during the HCERES evaluation of the PRISME lab (Orléans).
- Jeremie Dequidt was a member of the evaluation committee 33 (Robotics and Interaction) for the french research agency (ANR)
- Christian Duriez was a member of the COS for the Professor position in soft robotics at the University of Besançon.
- Christian Duriez did an expertertise for ETH competitive grants.
11.1.6 Research administration
- Gang Zheng is member of Ecole Doctorale MADIS in the domain of AGITSI
- Gang Zheng is member of the scientific bureau of Inria Lille
11.2 Teaching - Supervision - Juries
11.2.1 Teaching
Teaching administration
- Jérémie Dequidt is the head of the International Relations at Polytech Lille.
- Alexandre Kruszewski is in charge of the Embedded and Cyberphysical system major of Centrale Lille. He is also in charge of the coordination of the ‘automatic control' part of the EEA department of Centrale Lille Institute.
- Yinoussa Adagolodjo is the first-year supervisor in the Industrial Engineering program at Polytech Lille.
Teaching activities
- Engineering cycle: Paul Chaillou, (Automatic control and embedded systems), 64h, level L2, L3 and M1, Centrale Lille.
- Engineering cycle: Alexandre Kruszewski, 14 modules (automatic control, numeric control, embedded systems, robotics etc.), 250h, level (L3, M1, M2), Centrale Lille
- Engineering cycle: Jeremie Dequidt 6 modules (Programming, Software Engineering, Embedded Systems, Databases, Medical Simulation etc.) 350h, level (L3, M1, M2), Polytech Lille
- Master: Christian Duriez, Soft robotics, 24h, M2, Graduate degree en intelligence artificielle à l'Ecole Polytechnique (Palaiseau)
- Engineering cycle: Yinoussa Adagolodjo 10 modules ( Computer science, Robotics, Automation, Optimization, Industry 4.0, Introduction to research, Industrial logic, Modeling of production systems, Learning monitoring, Test and Maintenance.) 200h, level ( L3, M1, M2), Polytech Lille, IMT Nantes
- Engineering cycle: Etienne Ménager, Programming Software Engineering, 64h, level (L3,M1) , Polytech Lille
- Engineering cycle: Quentin Peyron, Automatique IE3 and IE4, Modélisation et commande de systèmes, h, level (L3,M1), Centrale Lille.
- Engineering cycle: Quentin Peyron, Introduction to soft robotics, module Cobotique et Haptique, h, level (M1), IMT Atlantique Nantes.
- Engineering cycle: Damien Marchal, C++ for robotics, 8h, level(M2), JUNIA Engineering school.
- Master: Damien Marchal, Option "Enjeux Environmentaux et Société", 24h, level(M2), University of Lille.
- Engineering cycle: Tanguy Navez, (Programming, Software Engineering, Databases), 64h, level L3 and M1, Polytech Lille.
11.2.2 Supervision
- Azouaou Ouyoucef, Control of soft parallel robots, supervised by G. Zheng, Q. Peyron, F. Boyer.
- Agneyan Dileep, Fault-diagnosis and lifetime prognosis of soft robots, supervised by Q. Peyron, V. Cocquempot.
- Congjian Gao, Design of parallel continuum robots, supervised by Q. Peyron, S. Briot.
- Ke Wu, Design, Modeling, Optimization and Control of compliant mechanisms, supervised by G. Zheng
- Lingxiao Xun, Modeling and control of ionic polymers, supervised by A. Kruszewski and G. Zheng
- Haihong Li, Modeling and control of soft robot via Cosserat theory, supervised by G. Zheng
- Yiru Guo , Design and analysis of flexible mechanisms, supervised by G. Zheng and A. Polyakov
- Zitong Zhang, Control of rigid-flexible coupled mechanism, supervised by G. Zheng and A. Polyakov
- Sizhe Tian, Simulation of needle insertion into a bio-inspired active prostate phantom: Application to biopsy and brachytherapy, supervised by J. Dequidt and Y. Adagolodjo
- Flavie Przybylski, Simulation of eversion robots, supervised by J. Dequidt and C. Duriez
11.2.3 Juries
- Christian Duriez was :
- Reviewer for the PhD of Clément Trotobas defended on August 23th 2023 at the University of Montpellier
- President of the Jury for the PhD of Fouad Makiyeh defended on December 12 2023 at University of Rennes
- Reviewer for the PhD of Hayden Randles from the University of Auckland, not yet defended
- Reviewer for the Habilitation of Kanty Rabenorosoa, defended on March 8th 2023 at the University of Besançon
- Assesseur for the Medecine thesis of Malick Sagenly defended on September 22th 2023 at the University of Lille
- Examiner for the PhD of Shijie Li defended on January 27th 2023 at the University Polytechnique Hauts-de-France
- Reviewer for the PhD of Matthias Tummers, defended on April 26th 2023 at the University of Grenoble AllShapeComparison
- Reviewer for the PhD of Ziqiu Zeng defended on September 12th 2023 at the University of Strasbourg.
- President for the Habilitation defense of Pierre Brice Wieber defended on June 8th 2023 at the University of Grenoble Alpes
- Jeremie Dequidt was :
- reviewer for the PhD of Alban Odot defended the 07/11/23 at University of Strasbourg
- reviewer for the PhD of Matyas Diezinger defended the 21/12/23 at University of Franche-Comté
- Alexandre Kruszewski was reviewer of the PhD of Anh NGUYEN defended the 11/07/23 at university of Bourgogne Franche-Comté.
- Quentin Peyron was examinator of the PhD of Federico ZACCARIA defended the 20/12/2023 at Centrale Nantes.
11.3 Popularization
11.3.1 Internal or external Inria responsibilities
- D. Marchal is in charge of the software developement service of the CRIStAL laboratory.
- D. Marchal is in charge of sustainability integration for the CRIStAL laboratory.
11.3.2 Interventions
- Y. Adagolodjo gave a tutorial on using our PluginCosserat software. Participants come from the University of Japan and Germany.
- The Defrost team presented at several scientific vulgarization events such as the Salon Robotik 2023, the RIC days 2023 and les journées des jeunes Mathématiciennes.
12 Scientific production
12.1 Major publications
- 1 articleCoupling numerical deformable models in global and reduced coordinates for the simulation of the direct and the inverse kinematics of Soft Robots.IEEE Robotics and Automation Letters62April 2021, 3910-3917HALDOI
- 2 articlePlanning of soft-rigid Hybrid arms in Contact with Compliant Environment: application to the transrectal biopsy of the prostate.IEEE Robotics and Automation Letters72February 2022, 4853-4860HALDOI
- 3 articleSoftware toolkit for modeling, simulation and control of soft robots.Advanced Robotics31November 2017, 1208-1224HALDOI
- 5 articleFast, generic and reliable control and simulation of soft robots using model order reduction.IEEE Transactions on Robotics3462018, 1565 - 1576HALDOI
- 6 articlePiecewise Linear Strain Cosserat Model for Soft Slender Manipulator.IEEE Transactions on Robotics3932023, 2342-2359HALDOI
- 7 articleSofaGym: An open platform for Reinforcement Learning based on Soft Robot simulations.Soft Robotics2022HAL
- 8 articleDesign, implementation and control of a deformable manipulator robot based on a compliant spine.The International Journal of Robotics ResearchMay 2020HALDOI
- 9 articleControl Design for Soft Robots based on Reduced Order Model.IEEE Robotics and Automation Letters41January 2019, 25-32HALDOI
- 10 articleAnisotropic soft robots based on 3D printed meso-structured materials: design, modeling by homogenization and simulation.IEEE Robotics and Automation Letters52January 2020, 2380-2386HALDOI
- 11 articleModeling and control of conducting polymer actuator.IEEE/ASME Transactions on Mechatronics495-506February 2023HALDOI
12.2 Publications of the year
International journals
International peer-reviewed conferences
Scientific book chapters
Doctoral dissertations and habilitation theses
Reports & preprints