

Section: New Results
Control of mobile robots
Participants : Claude Samson, Pascal Morin, Minh-Duc Hua [Post Doc, I3S, CNRS-Univ. of Nice-Sophia Antipolis] , Daniele Pucci, Glauco Scandaroli, Luca Marchetti, Tarek Hamel [Univ. of Nice-Sophia Antipolis] .
New developments of the Transverse Function control approach
We are pursuing the development of the Transverse Function control approach for highly nonlinear systems via the application of the approach to challenging mechanical systems with various structural control properties.
Control of a redundant wheeled snake mechanism using transverse functions on
The Transverse Function approach is applied to the control of a nonholonomic three-segments/snake-like wheeled mechanism, similar to the planar low-dimensional version of Hirose's Active Cord Mechanism (ACM) previously studied [65] , but with two additional internal degrees of freedom (d.o.f.) whose actuation yields more flexible and efficient control solutions (see figure 10 ). From a theoretical point of view, these complementary d.o.f. modify the Control Lie Algebra of the system so that only first-order Lie brackets of the control vector fields are needed to satisfy the Lie Algebra Rank Condition (LARC). The fact that four independent (angular velocity) control inputs are used also implies for this system the existence of Transverse Functions (TF) defined on the six-dimensional special orthogonal group . Several examples of mechanisms whose control involve TF defined on have been pointed out in the past [54] , [64] , [65] . Beyond the specific control problem addressed here, a motivation for the present study is to illustrate for the first time how functions defined on the larger set can be determined and used for the control of a physical system. This study is complemented with recalls concerning the parametrization of by pairs of isoclinic quaternions and with the derivation of complementary differential calculus relations associated with this parametrization. The results will soon be submitted for presentation at an international conference.
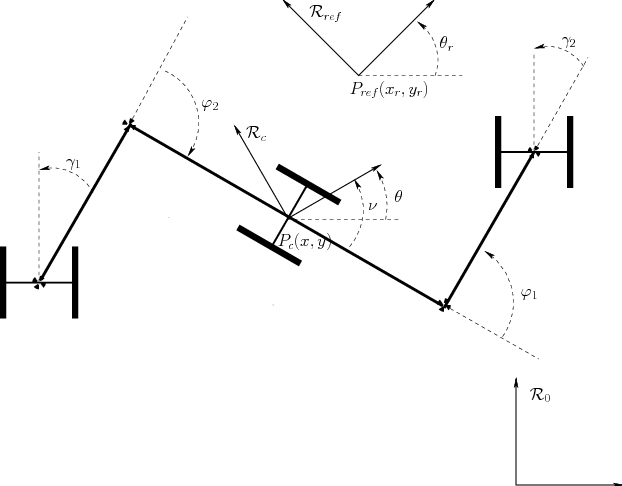
Control of three hooked vehicles with off-axle hitches
An extension of the study [65] performed last year on Hirose's Active Cord Mechanism (ACM) concerns the case when one of the wheeled-trains (the middle one, for instance) possesses actuators giving it tracting and rotating capacities (alike a unicyle-like vehicle), while the other two vehicles are passively hooked to this tracting vehicle. This type of actuation departs from the one of Hirose's Active Cord Mechanism for which the tracting capacity of the mechanism relies exclusively on the deformation of the system of vehicles via the control of the inter-connecting angles, and it makes an important difference at the control level. This system may also be seen as a unicycle-type vehicle with two trailers and off-axle hitches. Unlike the simpler hitch-on-axle case commonly addressed in the litterature, this system is not differentially flat and "complete" feedback solutions ensuring practical stabilization of any, feasible or non-feasible, trajectory remained an open issue. This actuation allows for the complete alignment of the three vehicles without going through actuation singularities, and for the asymptotic tracking of a reference frame moving along a straight line or a circle. On the other hand, in order to fully take advantage of the extra possibilities offered by it, one has to consider higher-order Lie bracket maneuvering motions that significantly complicate the feedback control design. The Transverse Function approach is applied using the fact that a dynamic extension of this two-control-inputs system is left-invariant on a 6-dimensional Lie group. Transverse functions calculated as the group product of "elementary" functions defined either on toruses or on , and yielding feedback controls ensuring asymptotic stabilization of "feasible" reference trajectories under common "persistent excitation" properties (as in the case of classical feedback control solutions based on a linear approximation of the associated tracking error system) are proposed. As usual, the superiority of the transverse function solution over more classical solutions comes from that it also applies to the case of non-feasible reference trajectories for which (practical) stabilization involves complex maneuvers. The results of this study will be submitted next year for presentation at an international conference.
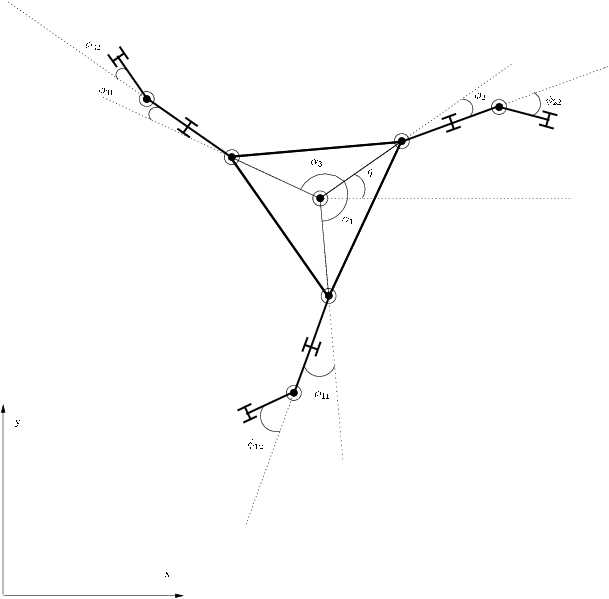
Control of an extended trident-snake vehicle
This study is part of a thesis work on the control of non-standard nonholonomic mobile robots by W. Magiera under the dual supervision of Prof. K. Tchon (Wroclaw University of Technology) and C. Samson. This collaboration involves several long term visits of the PhD student at INRIA, starting this year (2 months), and for the next two years. This year's objective is to address a particularly challenging control problem and evaluate the possibilities offered by the Transverse Function approach to solve it. The system under consideration is based on the "common" trident snake mechanism [54] complemented with one, two, or three additional "passive" wheeled extensions, each of them subjected to the rolling-without-slipping constraint (see figure 6.2.1.3 ). Transverse Funstions solutions tested so far involve a mixt (product) of functions defined either on the torus, or on special orthogonal groups, and future improvements may involve the search for new transverse functions.
Control of aerial vehicles
Vehicles subjected to lift forces
The development of a general theory for the control of underactuated (ground, marine, and aerial) vehicles whose main propulsion relies on a thrust force exerted in a single (vehicle's related) direction was continued this year. Part of this program, more specifically devoted to aerial vehicles, is the subject of D. Pucci's thesis research project. This year's focus was the prolongation of the work initiated last year on the modelling of lift forces and on their effects on the flight and control of aerial vehicles. Among the new results obtained on the subject, an extension and generalization of a previous feedback control strategy developed for spherically-shaped vehicles only subjected to drag forces [52] , based on an "ideal" generic model of lift and drag forces associated with bi-symmetric wings, has been accepted for presentation at an international conference ([34] ). The proposed solution involves a change of thrust control input in order to render the dynamics of the transformed system independent of the angle of attack associated with the vehicle's main wing. A weakness of the aforementioned model is that it does not account for the so-called stall phenomenon, which is an abrupt loss of lift when the angle of attack increases beyond a certain value called stall angle. Taking it into account adds considerable complexity to the vehicle's dynamics, especially in the case of a vehicle moving within a fluid endowed with a large Reynolds number for which the stall phenomenon can no longer be neglected. We showed that, although this phenomenon never forbids the existence of an attitude equilibrium given a desired reference velocity, the uniqueness of this equilibrium is not always granted. As a consequence, modifications of the desired velocity may result in the abrupt disappearance of an equilibrium so that the asymptotic stabilization of a desired velocity profile may become an ill-conditioned problem. To avoid this complication a possibility consists in characterizing "good" velocity profiles –associated, for instance, to transition maneuvers between hovering and high-velocity cruising– for which the existence of continuously changing equilibria is ensured. First results on this topic and research direction have been submitted for presentation to an international conference.
Nonlinear control of VTOL UAVs with uncertain position measurements
This work concerns the feedback control of VTOL UAVs (Vertical Take-Off and Landing Unmanned Aerial Vehicles). The objective is to asymptotically stabilize a reference equilibrium configuration with a "semi-global" convergence domain, i.e global convergence domain in position and semi-global in orientation, knowing that a global convergence domain in orientation cannot be obtained with continuous feedback laws due to the topology of the rotation space . Several solutions to this problem have been proposed in the past years, under the assumption that the pose (i.e. position and orientation) is completely known. This work concerns the case when the relation between the "position measurements" and the true position vector is uncertain. In practice, such uncertainties are related, e.g., to ill-calibrated sensors or to uncomplete knowledge of the environment in the case of proximetry sensors. It is assumed that position measurements are given by where is the true position error with respect to the reference position, and is an unknown invertible matrix. As a first contribution, we propose a class of feedback laws that achieve semi-global stability of the equilibrium for any matrix that satisfies the stability criteria where is the identity matrix, is a strictly positive function, and is the vector of control parameters. An explicit expression of the function is provided, thus relating the control parameters to the stability margin. The second contribution of this work is the application of this control approach to the visual servoing of VTOL UAVs with respect to a planar vertical structure (wall, etc). From the homography matrix that relates the current camera image to a reference image (taken at the reference pose), we derive a signal output of the form . The matrix typically depends on unknown parameters but we show that a very rough knowledge of them is sufficient to design a stable controller based on the above-mentionned stability criterion. These results have been submitted for publication at an international conference. This is a joint work with H. de Plinval and P. Mouyon from ONERA Toulouse.
Development of an autonomous shopping cart
This work, which consists in developing a shopping cart with autonomy capabilities (automatic user following, obstacle avoidance, etc), is part of the national INRIA PAL project (Personally Assisted Living) which aims at developing robotic tools for disabled persons or elderlies.
The architecture of “Autonomous Shopping Cart” has been developed in three layers. The first one is responsible for connecting the services layer to physical (or virtual) devices. During this year, all necessary components to access the devices have been implemented:
-
the Phidgets library wraps the API of Phidgets devices and abstracts the access to the peripherals on the wheelchair robot;
-
the Hannibal library wraps the interface to access the Hannibal robot (through Carmen library);
-
the Simulator library wraps the simulator interface.
All of them expose a common interface to the software modules. Thus, the higher components do not have to be changed if the test platform changes.
The second level is the core of this year's work. It is composed by the Control module and Modeling module. The Control module aims at stabilizing the trajectory of the robot w.r.t a given reference motion. In practice, this reference motion corresponds to the cart user that needs to be followed, but it could be any virtual reference motion. A first implementation of the Control module has been made using Matlab software. The result is a Control library that contains two different methods for controlling the trajectory:
These methods have been implemented in Matlab language and then converted in C++. The resulting library has been utilized within the Control module deployed on the robotic platform.
The main objective of the Modeling module is to detect the cart user within the sight of the sensors. This task is generally non-trivial, due to noise in the sensor signals and variations of the environment. For this reason a Multiple Hypothesis Tracker has been used to allow for the presence of several persons in the environment. The method uses the laser scans to extract potential persons and then a Selector algorithm extracts the best hypothesis for the cart user. This hypothesis is then converted into a virtual reference point given to the Control module for trajectory tracking.
The third layer is represented by the Behavior module. This component manages the other modules, starts and stops services on request, enables the initialization procedure and so on. As for now, it starts all modules and initiates the starting procedure. In particular, it selects the first person to be tracked, among possible candidates.
Experiments have been successfully conducted both on the mobile robot Hannibal and on the wheeled walking aid ANG (Assistive Navigation Guide) developed by the EPI Coprin.