

Section: New Results
New methods for data assimilation
Since the beginning, CLIME has been focused on new techniques for data assimilation. Last year's focus of the methodological development was on the the use of non-Gaussian approaches for inverse modeling, and the construction of a multiscale data assimilation methodology. Several methodological papers have now been published on these topics. This year, the applications of these methodologies are put forward in the inverse modeling section, although new theoretical developments have been added to these approaches. In addition, new topics have been addressed, such as the ensemble Kalman filter with a theory that puts the EnKF on safer grounds, the use of 4D-Var for the estimation of fields of parameter in dispersion models, and the real-time data assimilation at urban scale.
Ensemble Kalman filtering without the intrinsic need for inflation
Participant : Marc Bocquet.
The main intrinsic source of error in the ensemble Kalman filter (EnKF) is sampling error. External sources of error, such as model error or deviations from Gaussianity, depend on the dynamical properties of the model. Sampling errors can lead to instability of the filter, which, as a consequence, often requires inflation and localization. The goal of this study is to derive an ensemble Kalman filter, which is less sensitive to sampling errors. A prior probability density function conditional on the forecast ensemble is derived using Bayesian principles. Even though this prior is built upon the assumption that the ensemble is Gaussian-distributed, it is different from the Gaussian probability density function defined by the empirical mean and the empirical error covariance matrix of the ensemble, which is implicitly used in traditional EnKFs. This new prior generates a new class of ensemble Kalman filters, called finite-size ensemble Kalman filter (EnKF-N). One deterministic variant, the finite-size ensemble transform Kalman filter (ETKF-N), is derived. It is tested on the Lorenz '63 and Lorenz '95 models. In this context, ETKF-N is shown to be stable without inflation for ensemble size greater than the model unstable subspace dimension, at the same numerical cost as the ensemble transform Kalman filter (ETKF). One variant of ETKF-N seems to systematically outperform the ETKF with optimally tuned inflation. However, it is shown that ETKF-N does not account for all sampling errors and necessitates localization like any EnKF, whenever the ensemble size is too small. In order to explore the need for inflation in this small ensemble size regime, a local version of the new class of filters is defined (LETKF-N) and tested on the Lorenz '95 toy model. Whatever the size of the ensemble, the filter is stable. Its performance without inflation is slightly inferior to that of LETKF with optimally tuned inflation for small interval between updates, and superior to LETKF with optimally tuned inflation for large time interval between updates.
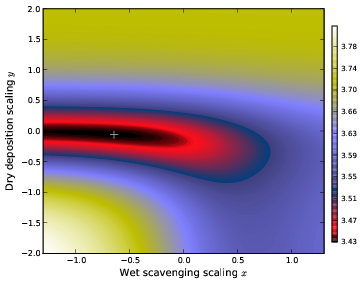
Parameter field estimation for atmospheric dispersion: Application to the Chernobyl accident using 4D-Var
Participant : Marc Bocquet.
Atmospheric chemistry and air quality numerical models are driven by uncertain forcing fields: emissions, boundary conditions, wind fields, vertical turbulent diffusivity, kinetic chemical rates, etc. Data assimilation can help to assess these parameters or fields of parameter. Because those parameters are often much more uncertain than the fields diagnosed in meteorology and oceanography, data assimilation is much more an inverse modeling challenge in this context. In this study, we experiment with these ideas by revisiting the Chernobyl accident dispersion event over Europe. We develop a fast four-dimensional variational scheme (4D-Var), which seems appropriate for the retrieval of large parameter fields from large observations sets, and for the retrieval of parameters that are non-linearly related to concentrations. The 4D-Var, and especially an approximate adjoint of the transport model, is tested and validated using several advection schemes that are influential on the forward simulation as well as on the data assimilation results. Firstly, the inverse modeling system is applied to the assessment of the dry deposition parameters and of the wet deposition parameters. It is then applied to the retrieval of the emission field alone, to the joint optimization of removal process parameters and source parameters, and to the optimization of larger parameter fields, such as horizontal and vertical diffusivities, or dry deposition velocity field. The physical parameters used so far in the literature for the Chernobyl dispersion simulation are partly supported by the study. The crucial question of deciding whether such an inversion is merely a tuning of parameters, or a retrieval of physically meaningful quantities is discussed. Even though inversion of parameter fields may fail to determine physical values for the parameters, it achieves statistical adaptation that partially corrects for model errors, and, using the inverted parameter fields, leads to considerable improvement in the simulation scores.
|
Real-time data assimilation
Participants : Vivien Mallet, Anne Tilloy, Fabien Brocheton [Numtech] , David Poulet [Numtech] , Cécile Honoré [Airparif] , Édouard Debry [INERIS] .
Based on Verdandi, Polyphemus and the “Urban Air Quality Analysis” software, real-time data assimilation was carried out at urban scale. The Best Linear Unbiased Estimator (BLUE) was computed for every hourly concentration map that the ADMS model computed. A posteriori tests were conducted over Clermont-Ferrand and Paris. We addressed the key issue of the covariance of the state error. The form of the error covariance between two points was determined based on the road network, considering the distance between points along the road and the distance of each point to the road. A few parameters (primarily two decorrelation lengths) were determined thanks to cross validation with several months of simulations and observations. The results showed strong improvements even at locations where no data was assimilated. The assimilation was carried out in the prototype “Votre Air” (http://votreair.airparif.fr/ ) for real-time air quality estimation over a part of Paris, which originally run in the context of the Futur-en-Seine festival and now runs operationally since June 2011.
At larger scale, the data assimilation library Verdandi was used to apply data assimilation (optimal interpolation) with the air quality model Chimere. This preliminary work will help INERIS to apply optimal interpolation in the operational platform Prev'air.