Section: Software
Perception Tools
Participants : David Filliat [correspondant] , Natalia Lyubova.
Perception Abstraction Engine
Participants : David Filliat [correspondant] , Natalia Lyubova.
PAE (Perception Abstraction Engine) is a C++ library developed to provide a uniform interface to existing visual feature detector such as SIFT, SURF, MSER, superpixels, etc... Its main goal is to be able to use these various feature detectors in a "bag of feature" approach for applications such as robot localisation and object recognition. Several approach are also implemented for the visual vocabularies, in particular the fast incremental vocabularies developed in the team.
The library provide common C++ interfaces to feature detectors, visual features and visual vocabularies. A factory approach make it possible to change the feature detectors and visual vocabularies types and parameters through configuration strings, without the need to recompile. Some applications are also included in the library, in particular topological robot localization (room recognition) and visual object recognition. An Urbi interface is also provided for these modules.
Incremental object discovery
Participants : Natalia Lyubova [correspondant] , David Filliat.
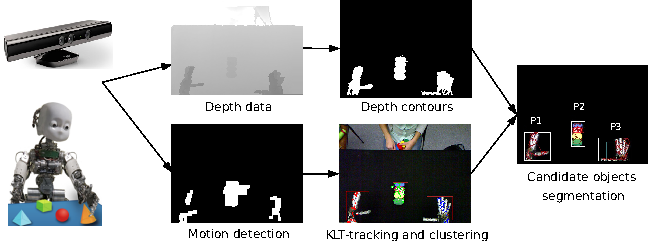
This software makes it possible to detect, model and recognize objects in a scenario of interaction between a humanoid robot and a human teacher. It is based either on standard images, or on the kinect camera to take advantage of the depth information. The software is written in C++ and relies mainly on PAE and OpenCV.
The software implements several modules: candidate object segmentation based on motion information, keypoint-based object tracking, incremental object model construction integrating multiple features (keypoints + superpixels) and object categorisation based on mutual information with robot motors (making it possible to segment robot parts, objects and humans).