

Section: New Results
Biomechanics and Motion Analysis
Balance in highly dynamic situations
Participants : Franck Multon [contact] , Ludovic Hoyet.
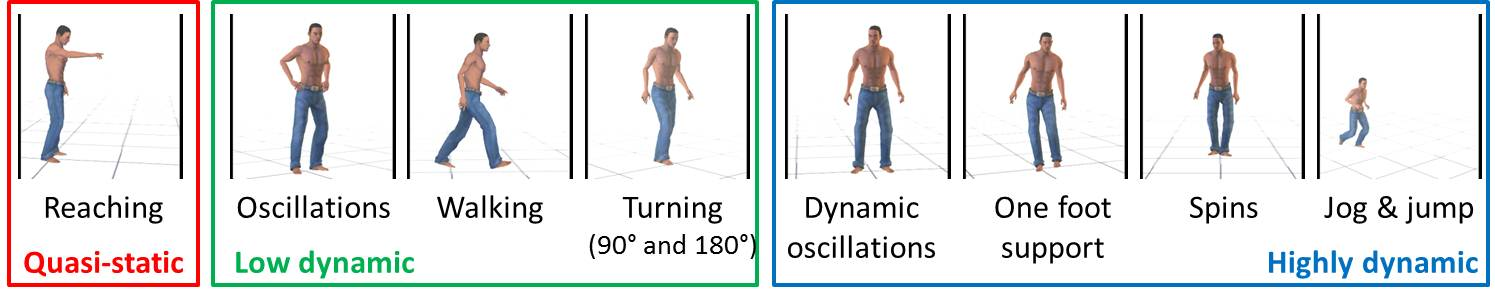
Balance is a key problem in humans as people stand on two feet which leads to a small base of support area compared to the overall body volume. This unstable state has been widely analyzed in static situation but is still difficult to understand when velocity and acceleration reach ineligible values. We thus have proposed an experimental protocol in order to evaluate if criteria published in the literature for specific motions could be generalized to any dynamic motions (see figure 7 ). To this end, each studied criterion was tested on various dynamic motions and the number of false falling alarms was reported in each case: the number of frames where the criterion detects loss of balance while the subject is actually balanced. The tested criteria where: the projection of the center of mass on the ground which should remain in the base of support, the Zero Moment Point widely used in robotics, the Zero Rate of Angular Momentum, the Foot Rotation Index and the extrapolated center of mass which was introduced in biomechanics recently. The results demonstrate that none of the criteria succeeded in correctly predicting loss of balance in highly dynamic motions [7] . It thus demonstrate the need to continue some fundamental work on this topic which is a key problem in many applications, including robotics, detection and prevention of falls in the Elderly, understanding performance in sports, improving realism in virtual human simulation...
|
Interaction strategies between two walkers to avoid collision
Participants : Armel Crétual, Julien Pettré [contact] , Anne-Hélène Olivier, Jan Ondrej, Antoine Marin.
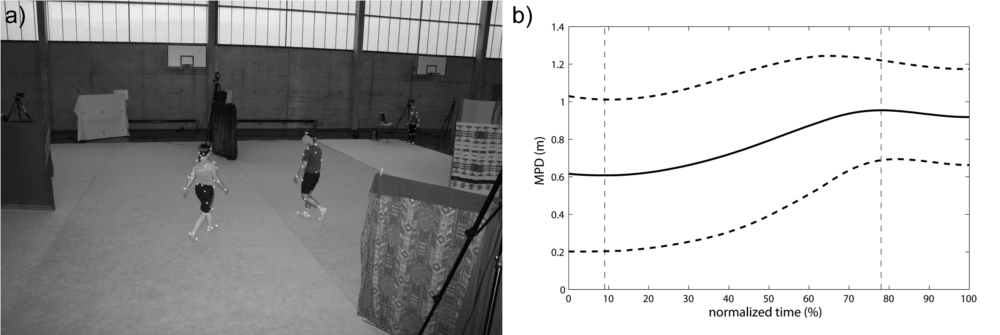
In the everyday life situation where two humans walk in the same nearness, each can be considered as a moving obstacle for the other one. They adapt their locomotion with respect to this external disturbance to avoid any collision. Collision avoidance between two humans has been largely neglected in the literature despite it lets us expect specific interactions. The main question we raised was to identify the conditions that induce avoidance manoeuvres in locomotor trajectories: what are the relations between the respective positions and velocities which induce motion adaptations? To answer this question, we proposed an original experiment: thirty participants were asked to walk two-by-two in a motion captured area. We assigned them locomotion tasks in order to provoke varied situations of potential future collisions (see figure 8 a). Following the hypothesis of a reciprocal interaction, we suggested a variable which is common to both of the walkers, the Minimum Predicted Distance (MPD), to predict the actual presence of physical interactions as well as to describe their properties. At each instant t, MPD was computed as the distance the walkers would meet if they did not perform motion adaptation after this instant t. Results showed that walkers adapted their motions only when required, i.e., when initial MPD was too low (<1m). We concluded that human walkers are able to accurately estimate future crossing distance and to mutually adapt it. The evolution of MPD enabled decomposing collision avoidance into 3 successive phases: observation, reaction, and regulation (see figure 8 b). Respectively, these phases corresponded to periods of time when, first, MPD was constant, second, increased to acceptable values by motion adaptation and, third, reached a plateau and even slightly decreased. This final phase demonstrates that collision avoidance is actually performed with anticipation. Future work is needed to inspect individual motion adaptations and to relate them with variation of MPD.
|
Quantification of pathological gait in adults
Participants : Armel Crétual [contact] , Kristell Bervet.
Quantifying gait deviation is still a challenge in adults patient follow-up within a rehab process. This quantification can be done on several levels. Among them, the most useful for practicians are surely kinematics and muscular activation. On the first one, Gillette Gait Index (GGI) has now become a common tool in rehabilitation centers to assess gait abnormalities. However, one limitation of this index is that it is based on some peak values and is thus sensitive to measurement noise. A new index, the Gait Deviation Index (GDI) which is based on joints angles patterns has been developed by the same team to avoid this problem. Nevertheless, both of them have only been validated in children with cerebral palsy. On the second level, no satisfaying global index has yet been developed. The first part of our study was to validate the GDI in adults. From a database of 74 healthy subjects and 48 patients we did demonstrate that GDI is a relevant index to quantify kinematic gait pattern in adults. Then, we developed a new index called KeR-EGI (for Kerpape-Rennes EMG-based Gait Index) which accounts for the muscular activation patterns of patients. There also, results were conclusive relying on a good correlation between GDI and KeR-EGI. Finally, our recommendation to practicians was to use both of these two index as they account for complementary aspects of pathology. This allow to better understand if gait disorder is more due to neurological injury or on the opposite to mechanical constraints such as joint stiffness.
Modeling gesture in sports: tennis serve
Participants : Nicolas Bideau [contact] , Guillaume Nicolas, Benoit Bideau, Caroline Martin, Richard Kulpa.
Most experimental studies on tennis focus on the segmental coordination in connection with the ball speed, but do not consider the resulting traumatisms. To this end, we currently develop an inverse dynamics modeling approach, based on muskuloskeletal parameters. As a fist step to this work, we calculated the joint constraints on the upper limb in the tennis serve, for professional and regional players. Eleven high level, professional players were compared to seven regional players during this specific motion. Each player was equiped with 42 reflectiver markers and tennis serve was analyzed using an optoelectronical system composed of 12 infrared cameras cadenced at 300Hz. For each player, values of force, power and internal work (in absolute value) were calculated for the three joints (shoulder, elbow, wrist) using a musculoskeletal model. The results showed that professional players produced higher power and internal work for each joint in comparison with the regional players. Results also showed a decrease in the values of internal work from the distal (wrist joint) to the proximal joint (shoulder joint). These results may explain shoulder pain in tennis, which is commonly depicted for high-level players in epidemiological studies. A first perspective to this work is to better take individual parameters (inertia, muscle parameters, pre-constraint, etc.) into account. Another perspective is to test various objective functions in order to predict which parameter is optimized during tennis serve.
Modeling gesture in sports: fin swimming
Participants : Nicolas Bideau [contact] , Guillaume Nicolas, Benoit Bideau, Richard Kulpa.
In swimming, experimental approaches are commonly used to analyze performance. However, due to obvious limitations in experimental approaches (impossibility to standardize any situations etc.), it is difficult to characterize surrounding fluid. To overcome this limitation, we currently develop analysis, modeling and simulation of aquatic locomotion, using CFD computer simulation and new methods based on animation of virtual characters.
A first application of this topic enables to evaluate the influence of swim fin flexibility on efficiency during swimming based on a CFD structure interaction model. Finite elements simulations are carried out for various material properties and various prescribed kinematics. Besides the significant effect of flexibility on propulsive forces, the results indicate that the propulsive efficiency is greatly influenced by the stroke frequency and the initial angle of attack. For the selected material properties, the results show that efficiency increases from 3.6 percents to 11.9 percents when the stroke frequency is increased from 0 to 1.7 Hz. Moreover efficiency is clearly increased from 5.0 percents to 24.2 percents when increasing the angle of attack from 0 to 45 degrees. Therefore, an interesting prospect of the present work could be an enhancement of the design of better performing swim fins.
A second application of this topic related to aquatic propulsion deals with a new method to evaluate cross-sectional area based on computer animation of swimming. Indeed, reducing cross sectional area (CSA) during starts and turns is a key part of performance optimisation. Different methods have been used to obtain this parameter without any standard: total human body volume to the power 2/3, wetted area or frontal area based on planimetry technique (PT). These different methods can lead to discrepancies in drag values. Recently, we used two synchronized camcorders to evaluate drag parameters during the different phases of an undulatory stroke cycle.
However, such a technique needs accurate synchronization and calibration of the different camcorders views. The aim of this study is to provide a new method based on animation of virtual characters to obtain instantaneous cross-sectional area in an undulatory stroke cycle. Its main advantage is to obtain cross-sectional area as well as biomechanical analysis with a single camcorder in a sagittal plan and without space calibration. From this, we intend to better understand swimming hydrodynamics and the way CSA influences active drag. More generally, this approach has been designed to provide new practical insights into swimming analysis protocols.