Section: New Results
Improvement of the force-feedback in a 1-ddl device
Participants : Michel Amberg, Frédéric Giraud, Betty Lemaire-Semail.
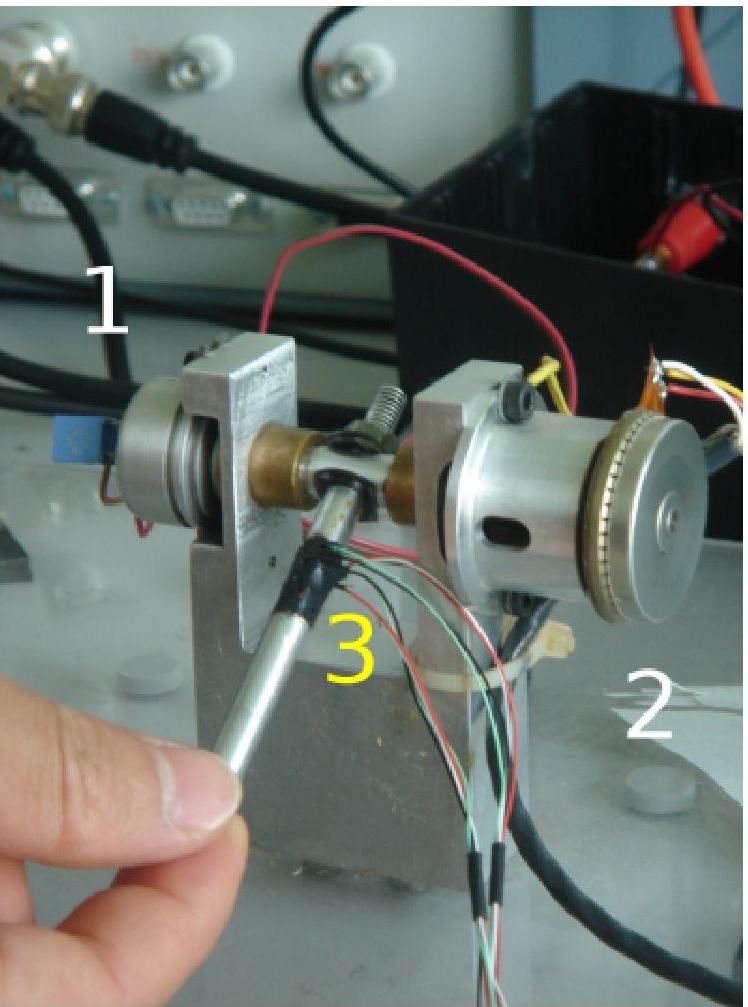
Traveling Wave Ultrasonic Motor have many advantages compared to the classical electromagnetic motors: they are lightweight, they don't need any speed reducer and they make no noise. In a 1-ddl force feedback device, they can help to reduce the bulk size of the mechanism by simplifying the kinematic chain. However, their control has to be very precise because the torque produced is not a straightforward function of the electrical parameters. Previously, we proposed several control algorithms and we obtained good results. But at low speed, problems still remains, like a stick-slip phenomena which makes the motor producing a cogging torque.
To cope with this problem, we first proposed an accurate modeling of the motor and its torque production [24] . We introduced a friction torque which holds the non linearity of the torque production. The evolution of this friction torque has been identified through an experimental study. Then we obtained by inversion a control scheme [13] . The basic idea is to compensate the virtual friction torque. In order to achieve a more accurate control of the torque, we proposed to identify on-line the parameters of the equation of .
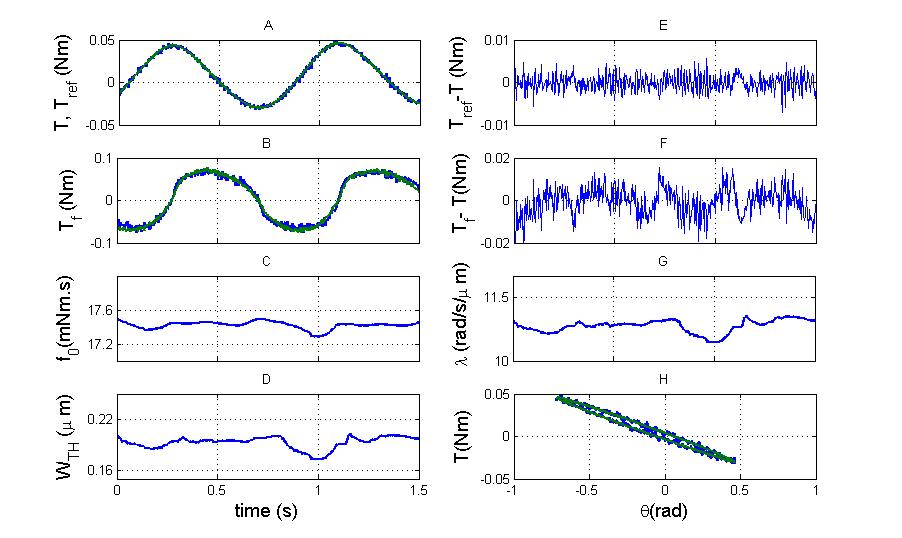
A one-degree-of-freedom force feedback lever was built to verify the control laws. The experiment involves use of the lever of the digitracker which is free to rotate about the horizontal axis, and is presented in figure 1 . In the same figure, we plotted the output torque of the motor, compared to its reference. Both are consistent, showing a good accuracy of the torque controller. To achieve that, the estimator's parameters are time-varying.