Section: New Results
Haptic Perception of Curvature through active touch
Participants : Michel Amberg, Frédéric Giraud, Betty Lemaire-Semail.
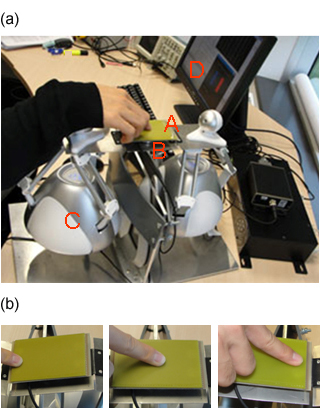
Haptic perception of curvature can be achieved by passive or active finger touch. In this study we proposed a new haptic device that could independently orient, elevate and translate a flat plate. User is free to move his finger on the plate; by controlling plate's orientation and position accordingly to the position of the finger, we can render a curved shape. The device is composed of two 6-dof haptic devices (Novint Falcon) on which we attached the plate (Figure 2 ). A force sensor is used to compute the position of the finger on the plate.