

Section: Scientific Foundations
Robust architectures for multi-modal perception
Summary
Machine perception is notoriously unreliable. Even in controlled laboratory conditions, programs for speech recognition or computer vision generally require supervision by highly trained engineers. Practical real-world use of machine perception requires fundamental progress in the way perceptual components are designed and implemented. A theoretical foundation for robust design can dramatically reduce the cost of implementing new services, both by reducing the cost of building components, and more importantly, by reducing the obscure, unpredictable behaviour that unreliable components can create in highly complex systems. To meet this challenge, we propose to adapt recent progress in autonomic computing to the problem of producing reliable, robust perceptual components.
Autonomic computing has emerged as an effort inspired by biological systems to render computing systems robust [42] . Such systems monitor their environment and internal state in order to adapt to changes in resource availability and service requirements. Monitoring can have a variety of forms and raises a spectrum of problems. An important form of monitoring relies on a description of the system architecture in terms of software components and their interconnection. Such a model provides the basis for collecting and integrating information from components about current reliability, in order to detect and respond to failure or degradation in a component or changes in resource availability (auto-configuration). However, automatic configuration, itself, imposes constraints on the way components are designed, as well as requirements on the design of the overall system [38] .
Robust software design begins with the design of components. The PRIMA project has developed an autonomic software architecture as a foundation for robust perceptual components. This architecture allows experimental design with components exhibiting, auto-regulation, self-description, self-Monitoring and self-configuration and self-repair. Maintenance of such autonomic properties can result in additional computing overhead within components, but can pay back important dividends in system reliability.
Detailed Description
Components based programming makes it possible to design systems that can be dynamically reconfigured during run-time. Reconfiguration can be achieved by having each component provide a description of its parameters, input data and output data using a standardized XML schema. Such XML descriptions can be recorded in a component registry and used to adapt interfaces either manually or automatically. Such XML descriptions are an example of the principle of self-description that characterizes Autonomic Systems [44] . Other such principles are defined at the component level and the systems integration level. At the component level, in addition to self-description one finds techniques for “auto-initialization”, “self-regulation”, self-monitoring and “performance reporting”. At the systems level, one finds methods for “self-configuration”, self-repair, and system supervision.
An important form of monitoring relies on a description of the system architecture in terms of software components and their interconnections. Such a model provides the basis for collecting and integrating information from components about current reliability, in order to detect and respond to failure or degradation in a component or changes in resource availability (auto-configuration). However, automatic configuration, itself, imposes constraints on the way components are designed, as well as requirements on the design of the overall system [38] , [44] . The PRIMA group has taken a leading role in introducing autonomic system approachs to programming perceptual systems.
Robust software design begins with the design of components. The PRIMA project has developed an autonomic software architecture as a foundation for robust perceptual components. This architecture allows experimental design with components exhibiting:
Auto-criticism: Every computational result produced by a component is accompanied by an estimate of its reliability.
Auto-regulation: The component regulates its internal parameters so as to satisfy a quality requirement such as reliability, precision, rapidity, or throughput.
Self-description: The component can provide a symbolic description of its own functionality, state, and parameters.
Self-Monitoring: the component can provide a report on its internal state in the form of a set of quality metrics such as throughput and load.
Self-configuration: The component reconfigures its own modules so as to respond to changes in the operating environment or quality requirements [52] .
Self-repair: The component can react to errors detected by self-monitoring by changing operating parameters, switching among execution modules, or editing internal data structures.
Maintenance of such autonomic properties can result in additional computing overhead within components, but can pay back important dividends in system reliability.
The PRIMA software architecture for supervised autonomic perceptual components [30] , [31] , is shown in figure 1 . In this design, perceptual components use a supervisory controller to dynamically configure, schedule and execute a set of modules in a cyclic detection and tracking process.
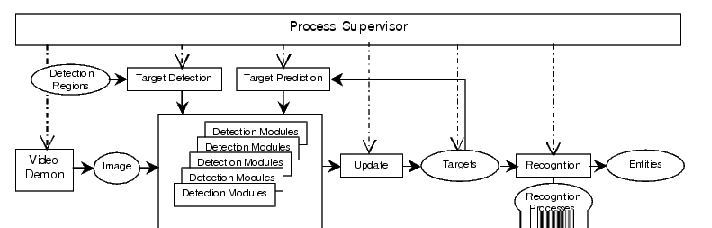
The supervisory controller provides five fundamental functions: command interpretation, execution scheduling, event handling, parameter regulation, and reflexive description. The supervisor acts as a programmable interpreter, receiving snippets of code script that determine the composition and nature of the process execution cycle and the manner in which the process reacts to events. The supervisor acts as a scheduler, invoking execution of modules in a synchronous manner. The supervisor handles event dispatching to other processes, and reacts to events from other processes. The supervisor regulates module parameters based on the execution results. Auto-critical reports from modules permit the supervisor to dynamically adapt processing. Finally, the supervisor responds to external queries with a description of the current state and capabilities.
Real-time visual processing for the perceptual component is provided by tracking. Tracking conserves information about over time, thus provides object constancy. Object constancy assures that a label applied to a blob at time T1 can be used at time T2. Tracking enables the system focus attention, applying the appropriate detection processes only to the region of an image where a target is likely to be detected. Also the information about position and speed provided by tracking can be very important for describing situations.
Tracking is classically composed of four phases: Predict, observe, detect, and update. The prediction phase updates the previously estimated attributes for a set of entities to a value predicted for a specified time. The observation phase applies the prediction to the current data to update the state of each target. The detect phase detects new targets. The update phase updates the list of targets to account for new and lost targets. The ability to execute different image processing procedures to process target information with an individual ROI is useful to simultaneously observe a variety of entities.
Homeostasis, or "autonomic regulation of internal state" is a fundamental property for robust operation in an uncontrolled environment. A process is auto-regulated when processing is monitored and controlled so as to maintain a certain quality of service. For example, processing time and precision are two important state variables for a tracking process. These two may be traded off against each other. The component supervisor maintains homeostasis by adapting module parameters using the auto-critical reports from modules
An auto-descriptive controller can provide a symbolic description of its capabilities and state. The description of the capabilities includes both the basic command set of the controller and a set of services that the controller may provide to a more abstract supervisor. Such descriptions are useful for both manual and automatic assembly of components.
In the context of recent National projects (RNTL ContAct) and European Projects (FAME, CAVIAR, CHIL), the PRIMA perceptual component has been demonstrated with the construction of perceptual components for
-
Tracking individuals and groups in large areas to provide services,
-
Monitoring a parking lot to assist in navigation for an autonomous vehicle.
-
Observing participants in an meeting environment to automatically orient cameras.
-
Observing faces of meeting participants to estimate gaze direction and interest.
-
Observing hands of meeting participants to detect 2-D and 3D gestures.
-
Observing and monitoring the activities of groups to understand social interaction