

Section: New Results
Human Centered Navigation in the physical world
Goal oriented risk based navigation in dynamic uncertain environment
Participants : Anne Spalanzani, Jorge Rios-Martinez, Arturo Escobedo-Cabello, Procopio Silveira-Stein, Alejandro Dizan Vasquez Govea, Christian Laugier.
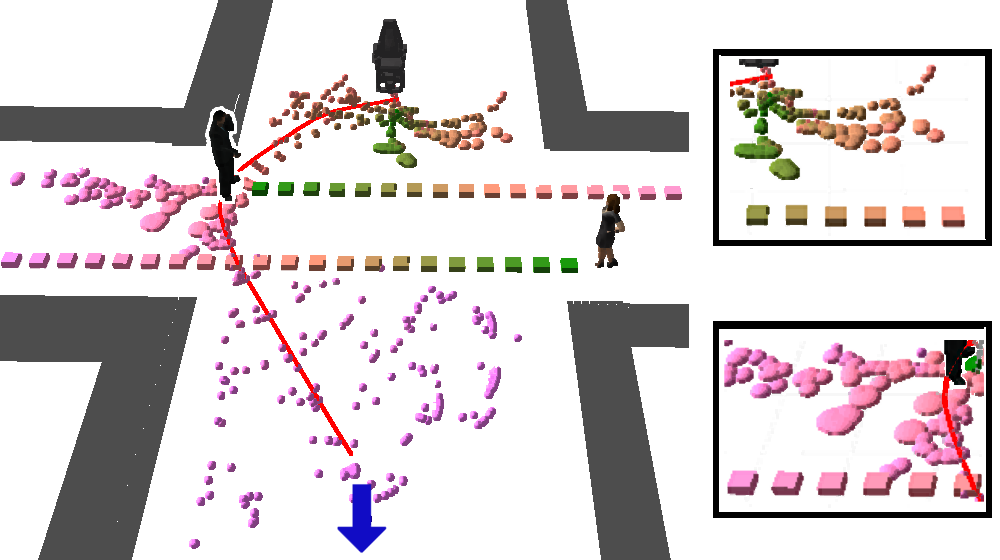
Navigation in large dynamic spaces has been adressed often using deterministic representations, fast updating and reactive avoidance strategies. However, probabilistic representations are much more informative and their use in mapping and prediction methods improves the quality of obtained results. Since 2008 we have proposed a new concept to integrate a probabilistic collision risk function linking planning and navigation methods with the perception and the prediction of the dynamic environments [57] . Moving obstacles are supposed to move along typical motion patterns represented by Gaussian Processes or Growing HMM. The likelihood of the obstacles' future trajectory and the probability of occupation are used to compute the risk of collision. The proposed planning algorithm, call RiskRRT (see Figure20 for an illustration), is a sampling-based partial planner guided by the risk of collision. Results concerning this work were published in [58] [59] [60] . In 2012, We continue to work on developing probabilistic models and algorithms to analyze and learn human motion patterns from sensor data (e.g., tracker output) in order to perform inference, such as predicting the future state of people or classifying their activities. Our work has been published in the Handbook of Intelligent Vehicles [40] . We obtained some preliminary results on our robotic wheelchair combining RiskRRT with some social conventions described in section 6.3.2 . This approach and experimental results have been published at ISER 2012 [32] .
|
This algorithms is used in the work presented in the next three sections, work conducted under the large scale initative project PAL.
Socially-aware navigation
Participants : Jorge Rios-Martinez, Anne Spalanzani, Alessandro Renzaglia, Agostino Martinelli, Christian Laugier.
Our proposal to endow robots with the ability of socially-aware navigation is the Social Filter, which implements constraints inspired by social conventions in order to evaluate the risk of disturbance represented by a navigation decision.
The Social Filter receives from the perception system a list of tracked humans and a list of interesting objects in the environment. The interesting objects are designated manually according to their importance in a particular context, for example, an information screen in a bus station. After the process of such data, the Social Filter is able to output the risk of disturbance relative to people and interesting objects, on request of the planner and the decisional system. Thus, the original navigation solutions are “filtered” according to the social conventions taken into account. Notice that the concept of social filter is built as a higher layer above the original safety strategy, the planner and the decisional system are responsible to include the new constraints.
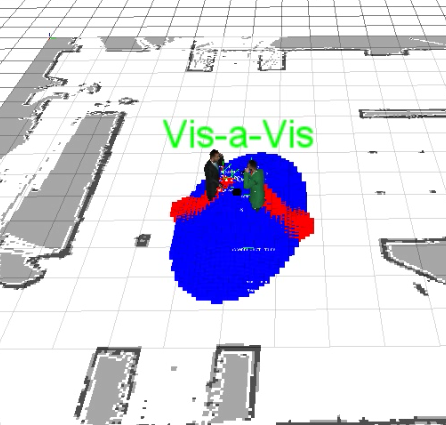
The on-board Kinect attached to our robotic platform was used to track people and to detect interactions. The Kinect sensor permits to get the position and orientation of the torso for each identified human. That information is passed to the Social Filter. Result images can be seen in Figure 21 .
|

In the context of socially-aware robot navigation in dynamic environments, as part of Jorge Rios-Martinez PhD thesis (to be defended in january 2013), two techniques have been proposed: one considering optimization-based navigation presented in [26] and the other a Risk-based navigation approach, previously presented in [75] .
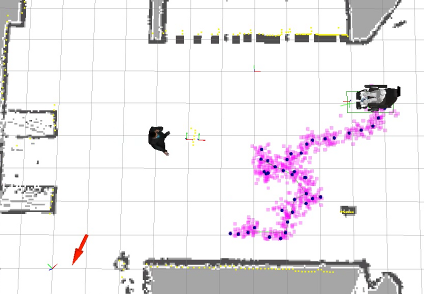
The optimization-based navigation strategy, done in collaboration with A. Renzaglia, is based on the Cognitive-based Adaptive Optimization (CAO) approach applied to robots [10] . We formulate the problem of socially-aware robot navigation as an optimization problem where the objective function includes, in addition to the distance to goal, information about comfort of present humans. CAO is able to efficiently handle optimization problems for which an analytical form of the function to be optimized is unknown, but the function is available for measurements at each iteration. A model of social space, contained in the Social Filter module, was integrated in order to work as a “virtual” sensor providing comfort measures. Figure22 a) shows an image of the method implementation on ROS (http://www.ros.org ) framework.
Social Filter models of social conventions were combined with RiskRRT [56] by including the knowledge of human management of space (Personal Space, interaction space, activity Space). The particular considered interaction was the conversation between pedestrians which was missed in the most part of related works. The approach presented shows a way to take into account social conventions in navigation strategies providing the robot with the ability to respect the social spaces in its environment when moving safely towards a given goal. Due to the inclusion of our social models, the risk calculated for every partial path produced by RiskRRT algorithm is given by the risk of collision along the path and the risk of disturbance to human spaces.
|
One last work was presented in [25] , where the socially-aware navigation based on risk was integrated with a model of human intention estimation (presented in section 6.3.4 . Results exhibited emerging behavior showing a robotic wheelchair interpreting facial gesture commands, estimating the intended goal and autonomously taking the user to his/her desired goal, respecting social conventions during its navigation.
Navigation Taking Advantage of Moving Agents
Participants : Procopio Silveira-Stein, Anne Spalanzani, Christian Laugier.
Following a leader in populated environments is a form of taking advantage of the motion of the others. A human can detect cues from other humans and smartly decide in which side to pass. Humans can also easily predict the motion of the others, changing his/her path to accommodate for conflictive situations, for example. Imitating the motion of a human can also improve the social acceptance of robots and so on.
The best leader is the one whose goal is close to the robot's one. To implement that, the Growing Hidden Markov Model (GHMM) technique is used [79] . This technique provides at the same time a capability to learn and modeling typical paths, as well as learning and predicting goals associated to paths, making it ideal for the proposed approach of leader election.
Once a leader is chosen, the robot starts to track his/her path and follow it, using the RiskRRT algorithm presented in section 6.3.1 . This algorithm takes into account the risk of collision with other agents, guaranteeing that the robot can avoid collisions even if its leader is lost or occluded.
Some results can be seen in the following experiments, where real human data was used together with a robot simulator.
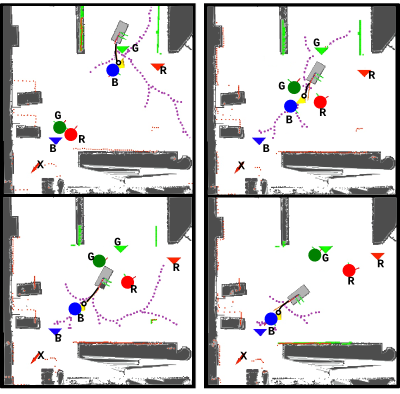
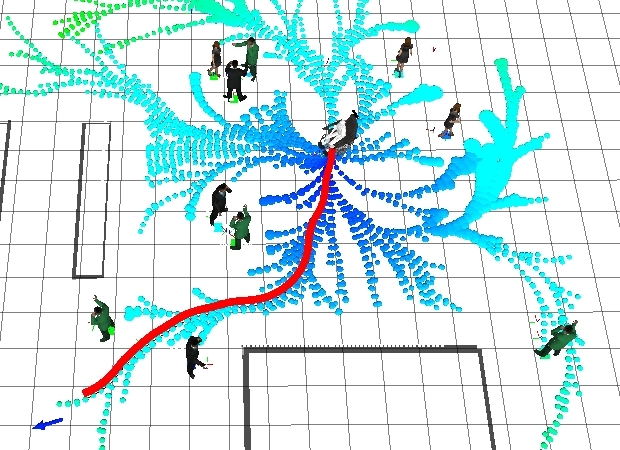
In Figure 23 , the experiment demonstrates one of the advantages of following a leader to improve the robot’s navigation capabilities. The direct path to the robot’s goal is obstructed by two incoming humans. Normally an algorithm suited for dynamic environment would create a detour as future humans’ position would conflict with the robot straight trajectory. However, as the robot is following a leader, it does not reason about the other agent’s future position. Therefore, the leader knows that people will give room for he/she to pass, and the robot profits from it.
Next step will be to use this technics will navigating in a crowd, task that a common planning strategy could hardly do.
Autonomous Wheelchair for Elders Assistance
Participants : Arturo Escobedo-Cabello, Gregoire Vignon, Anne Spalanzani, Christian Laugier.
The aging of world's population is bringing the need to provide robotic platforms capable to assist elder people to move [77] . It is necessary that such transportation is reliable, safe and comfortable. People with motor disabilities and elders are expected to benefit from new developments in the field of autonomous navigation robotics. Autonomously driven wheelchairs are a real need for those patients who lack the strength or skills to drive a normal electric wheelchair. The services provided by this kind of robots can also be used to provide a service of comfort, assisting the user to perform difficult tasks as traversing a door, driving in a narrow corridor etc. Simple improvements of the classical powered wheelchair can often diminish several difficulties while driving. This idea of comfort has emerged as a design goal in autonomous navigation systems, designers are becoming more aware of the importance of the user when scheming solution algorithms. This is particularly important when designing services or devices intended to assist people with some disability.
In order for the robot to have a correct understanding of the intention of the user (when moving around) it is necessary to create a model of the user that takes into account his habits, type of disability and environmental information. The ongoing research project is centered in the understanding of the intentions of the user while driving an autonomous wheelchair, so that we can use this information to make this task easier.
In 2011 a robotic wheelchair was set up as experimental platform. Some basic functions were included as the mapping of the environment using a Rao-Blackwellized Particle Filter [62] , localization using an Adaptive Monte Carlo Localization approach (AMCL) [78] , global planning using an A* algorithm [63] and local reactive planning using the Dynamic Window Algorithm [55] . Alongside some work was done with the kinect sensor in order to detect and track people. This behaviour was aimed to bring assistance not only to the user but also to the caregiver by allowing him to move more freely. The software implementation of the related approaches was done on the basis of the ROS middleware.
During 2012 the work was centered in the improvement of the usability of the system around three main axes:
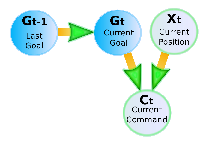
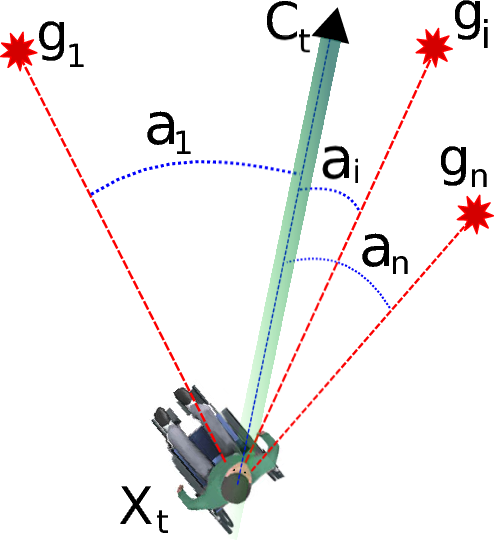
User intention estimation: A review of the state of the art in user's intention estimation algorithms was made and a new model to infer the intentions of the user in a known environment was presented [46] ,[47] . The algorithm models the intention of the user as 2D topological goals in the environment. Those places are selected according to how frequently they are visited by the user (user habits). The system was designed so that the user can give orders to the wheelchair by using any type of interface, as long as he can show the direction of the intended movement (joystick, head tracking, brain control, etc). As shown ni figure24 , the chosen approach uses a Bayesian model to model and infer the intentions. The main contribution of this work is to model the intention of the user as topological goals instead of normal trajectory-based methods, therefore the model is simpler to deal with. Current research is being done to understand which information is important to take into account in order to do better estimations of the user's intention. In particular, the movements of the head are considered by the proposed inference method.
The navigation is performed using the human-aware planning algorithm developed by the team which integrates a notion of social conventions and avoidance of dynamic obstacles to prevent uncomfortable situations when the wheelchair is navigating among humans (see section 6.3.2 for details)
Interfaces: People with motor disabilities and elders often have problems using joysticks and other standard control devices. Under this consideration our experimental platform was equipped with different types of user-interfaces to provide a multimodal functionality as described in [47] . A face pose interface allows to control the wheelchair's motion by changing the face direction, while voice recognition interface is used to guarantee an adequate control of the wheelchair for those commands that otherwise would be difficult to give by only using the face (Stop, start, etc). The use of a touch screen control is also possible.
Multimodal control: The wheelchair can be controlled in semi-autonomous mode employing the user's intention estimation module, described later, or in manual mode in which the user is in charge of driving by him self.
In manual mode the user controls the wheelchair's angular speed moving her head while the linear speed is controlled with vocal commands (faster, slower, break, etc).
In semi-autonomous mode the user shows the direction to his/her desired destination facing towards it. Whenever a new command is read from the face pose estimation system. The user's intention module computes the goal with the highest posterior probability. The navigation module receives the map of the environment, the list of humans present in the scene and the currently estimated goal to compute the necessary trajectory to the goal.
|

Multi-Robot Distributed Control under Environmental Constraints
Participants : Agostino Martinelli, Alessandro Renzaglia.
This research is the follow-up of a study begun three years ago in the framework of the European project sFly. The problem addressed is the deployment of a team of flying robots to perform surveillance coverage mission over an unknown terrain of complex and non-convex morphology. In such a mission, the robots attempt to maximize the part of the terrain that is visible while keeping the distance between each point in the terrain and the closest team member as small as possible. A trade-off between these two objectives should be fulfilled given the physical constraints and limitations imposed at the particular application. As the terrain's morphology is unknown and it can be quite complex and non-convex, standard algorithms are not applicable to the particular problem treated in this paper. To overcome this, a new approach based on the Cognitive-based Adaptive Optimization (CAO) algorithm is proposed and evaluated. A fundamental property of this approach is that it shares the same convergence characteristics as those of constrained gradient-descent algorithms (which require perfect knowledge of the terrain's morphology and optimize surveillance coverage subject to the constraints the team has to satisfy). Rigorous mathematical arguments and extensive simulations establish that the proposed approach provides a scalable and efficient methodology that incorporates any particular physical constraints and limitations able to navigate the robots to an arrangement that (locally) optimizes surveillance coverage.
Special focus has been devoted to adapt this general approach in order to deal with real scenarios. Specifically, this has been carried out by working in collaboration with the ETHZ (Zurich). To this regard, the approach has been adopted in the framework of the final demo of the sFly project. The demo simulates a search and rescue operation in an outdoor GPS-denied disaster scenario. No laser, no GPS, and Vicon or other external cameras are used for navigation and mapping, but just onboard cameras and IMUs. All the processing runs onboard, on a Core2Duo processing unit. The mission consists of first collecting images for creating a common global map of the working area with 3 helicopters, then engaging positions for an optimal surveillance coverage of the area, and finally detecting the transmitter positions.
The results of this research have been published in two journals, [14] , [15] , and on the thesis of A. Renzaglia, [10] .