Section: New Results
Dynamic Change Prediction and Situation Awareness
Vision-based Lane Change Prediction
Participants : Puneet Kumar, Mathias Perrollaz, Stephanie Lefevre, Amaury Nègre, Maiwen Gault.
Predicting driver's behaviors is a key component for future Advanced Driver Assistance Systems (ADAS). In 2012, we have proposed a novel approach for lane change prediction, using only information from a vision sensor embedded into the car. The idea is to predict in advance if our vehicle is about to change lane. Then this information can be used to properly help the driver, for instance by detecting inconsistencies with the turn lights signals.
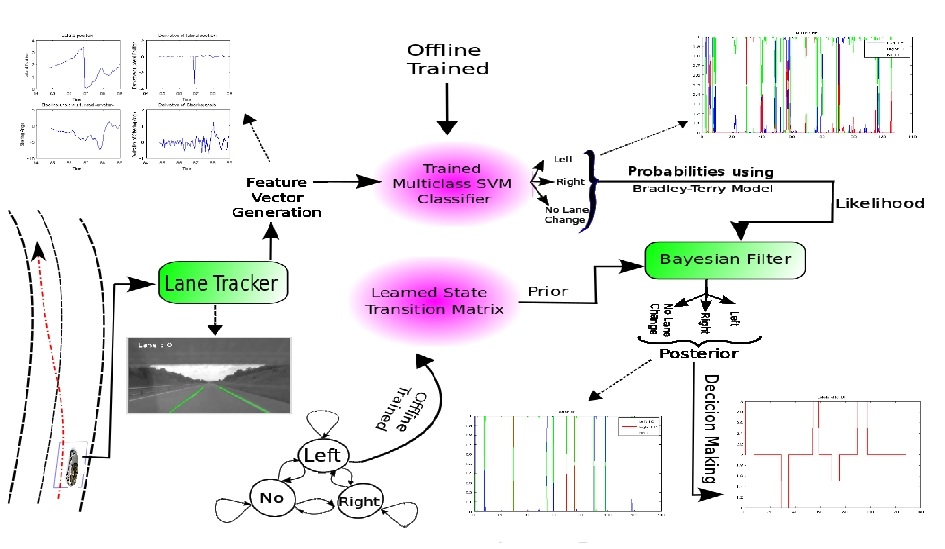
As an input, the method uses visual data from a camera embedded into the car. A multiple-size ridge filter is used to extract low level features from the image (white markings on black road). Then road lanes are estimated and tracked over time using a particle filter. This process allows parallel computing, and thus works in real time on GPU.
The road markings are used to estimate the position and heading angle of our car with respect to the lane, as well as the derivatives of these variables. This information is then used as a vector of features for a classifier. The used classifier is a multi-class Support Vector Machine (SVM). The three possible classes are "no lane change" (NL), "right lane change" (CR) and "left lane change" (CL). The classifier has been trained using real data of 180 lane changes on highway, manually annotated. The output of the classification is then converted into a set of probabilities using a generalized Bradley-Terry model.
The classifier provides a very short term classification, which can contain many errors. The longer term integration of the time information is obtained by feeding the classification results into a Bayesian Filter (BF). The posterior output of the filter provides the probability distribution over possible behaviors (NL, CR, CL), hence providing the lane change prediction.
Real-world data from our vehicle is used for the purpose of training and testing. Data from different drivers on different highways were used for the robustness evaluation of the overall approach. The proposed method show promising results, because it is able to predict driver's intention to change lane 1.3 seconds (average) in advance, with maximum prediction horizon of 3.29 seconds. We are now working on a real time implementation of this approach, to demonstrate its use on real situations (e.g., for warning the driver while driving on the highway).
Risk estimation at road intersections for connected vehicle safety applications
Participants : Stéphanie Lefèvre, Christian Laugier.
Intersections are the most complex and dangerous areas of the road network. Statistics show that most road intersection accidents are caused by driver error and that many of them could be avoided through the use of Advanced Driver Assistance Systems. In this respect, vehicular communications are a particularly promising technology. The sharing of information between vehicles over wireless links allows vehicles to perceive their environment beyond the field-of-view of their on-board sensors. Thanks to this enlarged representation of the environment in time and space, situation assessment is improved and dangerous situations can be detected earlier.
A PhD was started on this topic in 2009, in collaboration with Renault. It tackles the problem of risk estimation at road intersections from a new perspective: a Bayesian framework is proposed for reasoning about traffic situations and collision risk at a semantic level instead of at a trajectory level. While classic approaches estimate the risk of a situation by predicting the future trajectories of the vehicles and looking for intersections between them, here dangerous situations are detected by estimating the intentions of drivers and looking for conflicts between them. This novel approach to risk assessment is very relevant in the context of road traffic, as it takes into account the fact that the road network is a highly constrained environment regulated by traffic rules. The proposed approach relies on the estimation of drivers' intentions, and the main difficulty lies in the presence of uncertainties in the estimation process: uncertainties inherent to sensor data, and ambiguities when linking vehicle behavior with driver intention. In this work the information about the state of other vehicles is obtained via vehicle-to-vehicle communication, but the proposed framework for reasoning on traffic situations and risk is general and can be applied with other types of sensors, e.g., the ones presented in 6.1.3 .
The focus of the first year (2010) was on estimating a driver's intended maneuver at an intersection (go straight, turn left, etc.) based on the current state of the vehicle (position, orientation, turn signal state) and on contextual information extracted from the digital map. The idea was to use the information on the geometry of the road network and on the connectivity between lanes to build a statistical model of the relationship between a vehicle's state and the driver's intended maneuver. The proposed solution is based on a Bayesian Network and on geometric functions which automatically extract the characteristics of the intersection from a digital map. This approach was designed and implemented during a 3-month internship in the Stanford Artificial Intelligence Laboratory, in collaboration with Sebastian Thrun's Driving Group.
During the second year (2011) we augmented the Bayesian Network with a filtering process so that new measurements could be recursively used to estimate the driver's intentions. The new version of the motion model explicitly models the influence of traffic rules on the behavior of a vehicle. While state-of-the-art approaches usually assume independence between vehicles, the proposed motion model takes into account the mutual influences between the maneuvers performed by the vehicles in the scene. These improvements were carried out by introducing two new variables in the Bayesian Network. The “Intention to stop” corresponds to the driver's intention to come to a halt at the intersection. The “Expectation to stop” corresponds to whether or not the traffic rules expect the driver to come to a halt at the intersection. The former is assumed to be dependent on the previous intention of the driver and on the current expectation. The latter is assumed to be dependent on the rules applying at the intersection and on the previous situational context, i.e., the state of the other vehicles in the scene. With this model it is possible to infer what a driver intends to do and what a driver is expected to do from the successive measurements of the pose, speed, and turn signals of the vehicles in the scene. Risk can then be computed based on the probability that intention and expectation do not match.
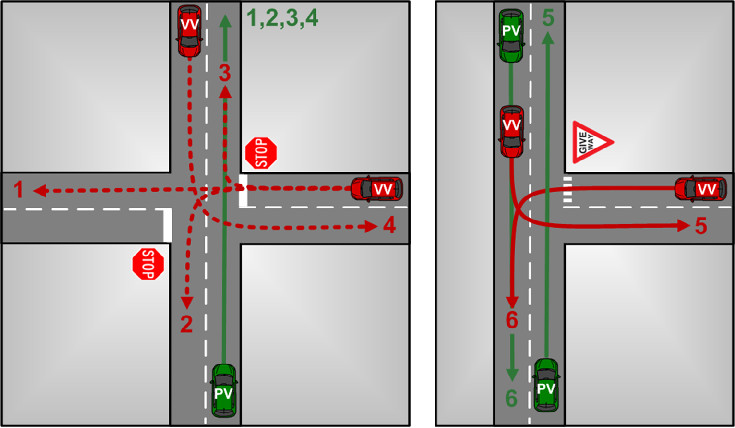
The focus of this year (2012) was on the evaluation of the performance of the algorithm. The proposed approach was validated in field trials using passenger vehicles equipped with vehicle-to-vehicle wireless communication modems, and in simulation. Our simulations assumed ideal perception and communication, and considered typical accident scenarios at a two-way-stop cross intersection. The tested maneuvers included crossing maneuvers, merging maneuvers, and left turn across path maneuvers (see Figure 17 ). A total of 240 instances of these scenarios were simulated, with both priority violations and stop violations as accident causes. The same number of instances were simulated for non-dangerous situations, by enforcing a 3 seconds safety distance between the vehicles at all times. An analysis of the collision prediction horizon led to the following conclusions:
1. There were no false alarms in non-dangerous situations, and no missed detection in the dangerous scenarios.
2. For merging and crossing maneuvers, the proposed algorithm was able to predict collisions at least 1.5 s before they occurred.
3. For left turn across path maneuvers, the proposed algorithm was able to predict collisions at least 0.6 s before they occurred.
4. Accidents caused by stop violations were detected on average 1 s earlier than the ones caused by priority violations.
Different accident avoidance strategies were tested: warning the driver of the vehicle with right-of-way, warning the driver of the other vehicle, applying autonomous braking on the vehicle with right-of-way, and applying autonomous braking on the other vehicle. It was found that the ability of each strategy to avoid an accident varies a lot with the situation. For example, the “autonomous braking on the vehicle with right-of-way” can avoid the accident in 91% of cases for stop violations, but only in 34% of cases for priority violations. “Warning the driver of the vehicle with right-of-way” can avoid the accident in 1% of cases for priority violations, while for the same scenarios “autonomous braking on the other vehicle” can avoid the accident in 99% of cases. These results were published at the conference IEEE IROS'12 [22] , and as an Inria Research Report [41] . Field trials were conducted using two vehicles equipped with off-the-shelf vehicle-to-vehicle wireless communication modems. Six different drivers took part in the experiments to recreate realistic dangerous and non-dangerous situations at a T-shaped give-way intersection (see Figure 17 ). The risk estimation algorithm was run online in one of the vehicles, and triggered a warning for the driver when it detected a dangerous situation (see Figure 18 ). In the 120 tests, there were no false alarms and no missed detections. The warning was always triggered early enough that accidents were avoided by performing an emergency braking. The field trials proved that the proposed approach can operate with success in real-life situations and trigger warnings in real time. They also showed the robustness of the algorithm, since the experiments were carried out with several drivers, a positioning system with a precision of 2 meters (standard deviation) and challenging wireless communication conditions. These results were published at the conference IEEE IV'12 [23] , where the paper received the Best PhD Student Paper award.
The PhD was successfully defended in October 2012 [9] . A patent application was filed with Renault in October 2012 [45] . This work will be continued within the Inria@SiliconValley program, in collaboration with the University of Berkeley, California. Ms Lefevre will conduct further research on this topic as a post-doctoral researcher at Berkeley starting January 2013.
|

Guidance for Uncertain shooting domain
Participant : Emmanuel Mazer.
This study is made in collabortion with MBDA (Monsieur Le Menec ) and Probayes (Monsieur Laurent Saroul) under the ITP framework financed by the british MOD and the french DGA
Contex This project relates to the use of lock after launch missiles, both long range anti aircraft missiles such as Meteor, or air to ground strike weapons employing for example IIR or Semi Active Laser (SAL) guidance. In both cases, a target is ultimately recognized and tracked by means of a seeker which detects a characteristic signal above the noise. This could be the target reflections of a radar beam, or the spot from a designating laser.
However, a missile is often launched at a target range which is greater than its seeker acquisition range, although within the kinematics No Escape Zone (NEZ). It is provided with targeting geometry before launch, and maybe (via a data link) during the first part of the trajectory. However, it must fly for some period in inertial mode, and during this time the target may manoeuvre. Also, errors build up due to the imperfections in the inertial navigation system. This means that the target bearing becomes increasingly uncertain whilst the range reduces. It may be necessary to scan the seeker to acquire the target. If the scan is not matched to the possible manoeuvres, the target may escape detection. But if the scan is large, the acquisition range will be reduced, because of the reduction in search time per solid angle. As the target is acquired later, the missile's terminal manoeuvre will be more severe, and as a result the range assumed for the original kinematics NEZ may have been too optimistic. Equivalently, it is possible to be too pessimistic about the target uncertainty, hence to scan too much, and acquire the target so late that there is no longer the manoeuvre capability to reach it. Present Weapon systems optimize the probability of successful interception assuming either Gaussian uncertainties, or worst case uncertainties.
Objectives and achievments of the GUS-D system
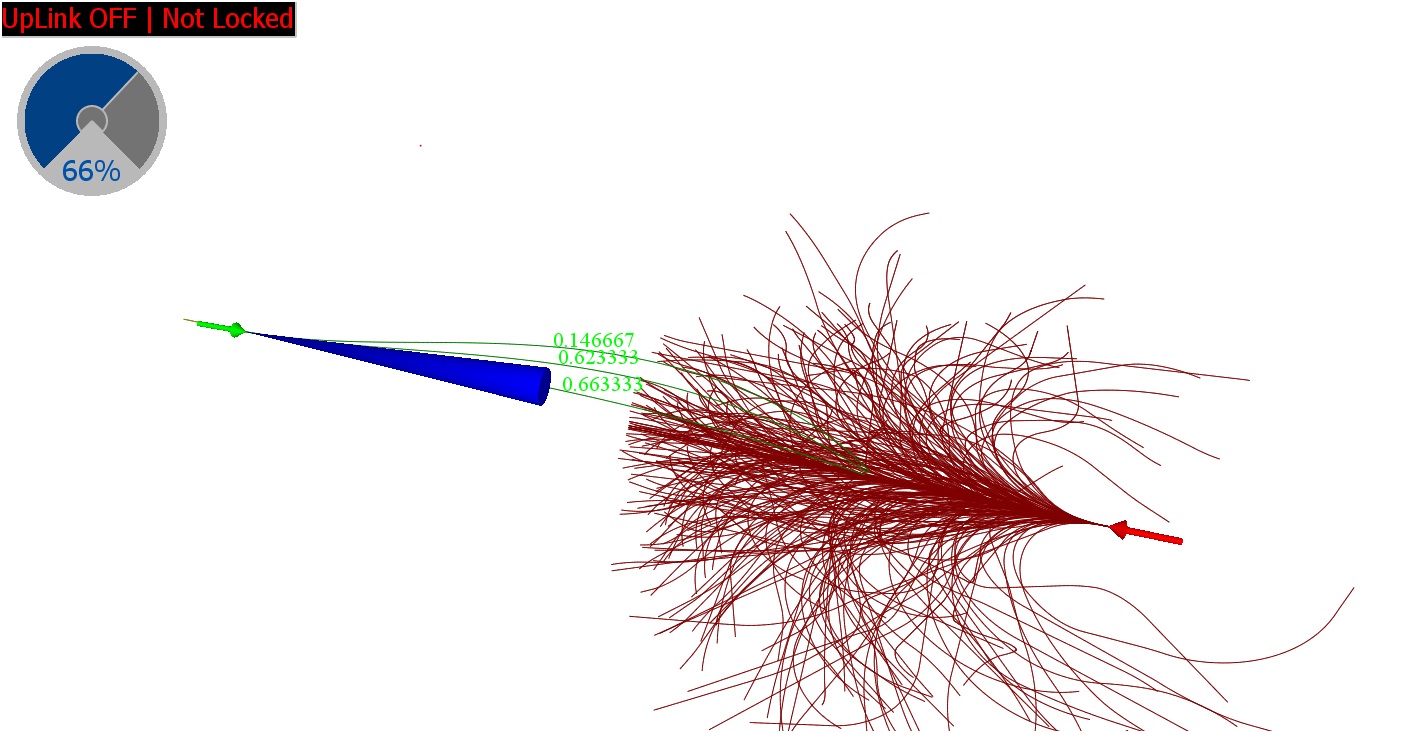
These considerations lead to the concept of a stochastic approach for computing a probabilistic, adaptive NEZ. Probabilistic NEZ depend on the uncertain target behaviour. The uncertainties we propose to deal with are also related to the missile Inertial Navigation System (INS) precision, to sensor errors and to misalignments. Moreover, the uplink management, i.e., when to evade and breakdown the link between the launching platform and the in-flight missile plays a major role on the target localization accuracy and by the way to the size of the NEZ. Finally, there is uncertainty in the target radar cross section, which has a big effect on the seeker acquisition range. The purpose of this study is better tactical advice to the pilot about launching decision and how long maintain the uplink, and where appropriate, better matching of seeker scan strategies to target behaviours. These decisions have impacts on the probability of combat success; i.e., not only to hit the target but also on the probability to survive, as the opponent aircraft or ground threat may launch similar weapons.
The project focuses predominantly on Air to Air systems. The Meteor scan strategy has been studied deeply and is no longer critical for the engagement of fighter jets, but an objective of the study is to extend the strategy to the engagement of targets of much lower radar cross section, where the acquisition range is significantly shorter. Nevertheless all the issues apply also to Air to Ground weapon systems.
The GUS-D system is limited to one to one engagement scenario:
The main functionality of the GUS-D system is then to provide to the user a probability of successful target interception given the current engagement conditions, and the uncertainties on the target properties and behaviours.
|