

Section: New Results
Joint Learning and Development of Language and Action
Learning to recognize parallel motion primitives with linguistic descriptions using Non-Negative Matrix Factorization
Participants : Olivier Mangin, Pierre-Yves Oudeyer.
We have elaborated and experimented a novel approach to joint language and motor learning from demonstration. It enables discovery of a dictionary of gesture and linguistic primitives, that can be combined in parallel to represent training data as well as novel activities in the form of combinations of known gestures. These methods and the results of our experiments participate in addressing two main issues of developmental robotics: 1) symbol grounding for language learning; 2) achieving compositionality in motor-learning from demonstration, which enables re-using knowledge and thus scaling to complex tasks. In particular, we are interested in learning motor primitives active in parallel, a less explored way of combining such primitives. To address these challenges we have explored and studied the use of nonnegative matrix factorization to discover motor primitives from histogram representations of data acquired from real demonstrations of dancing movements. Initial results were presented in [99] and further results are presented in [52] .
Curiosity-driven phonetic learning
Participants : Clément Moulin-Frier, Pierre-Yves Oudeyer.
We study how developmental phonetic learning can be guided by pure curiosity-driven exploration, also called intrinsically motivated exploration. Phonetic learning refers here to learning how to control a vocal tract to reach acoustic goals. We compare three different exploration strategies for learning the auditory-motor inverse model: random motor exploration, random goal selection with reaching, and curiosity-driven active goal selection with reaching. Using a realistic vocal tract model, we show how intrinsically motivated learning driven by competence progress can generate automatically developmental structure in both articulatory and auditory modalities, displaying patterns in line with some experimental data from infants. This work has been published in [53] and received the best paper award in computational models of development at the International Conference on Development and Learning, Epirob, San Diego, 2012.
We are now working on applying this approach to the control of a more complex articulatory synthesizer. We are interested in using the free software Praat, a powerful tool allowing to synthesize a speech signal from a trajectory in a 29-dimensional space of respiratory and oro-facial muscles. Numerous acoustic features can in turn be extracted from the synthesized sound, among which the Mel-frequency cepstral coefficients. Our hope is that a developmental robotics approach applied to a realistic articulatory model can appropriately manage the learning process of this complex mapping in high-dimensional spaces , and that observed developmental sequences can lead to interesting experimental data comparisons and predictions. In particular, using such a dynamic model controlled by muscle activity could hopefully allow to relate our results to more common speech acquisition data, in particular regarding infraphonological exploration and babbling.
Towards robots with teleological action and language understanding
Participants : Britta Wrede, Katharina Rohlfing, Jochen Steil, Sebastian Wrede, Jun Tani, Pierre-Yves Oudeyer.
It is generally agreed upon that in order to achieve generalizable learning capabilities of robots they need to be able to acquire compositional structures - whether in language or in action. However, in human development the capability to perceive compositional structure only evolves at a later stage. Before the capability to understand action and language in a structured, compositional way arises, infants learn in a holistic way which enables them to interact in a socially adequate way with their social and physical environment even with very limited understanding of the world, e.g. trying to take part in games without knowing the exact rules. This capability endows them with an action production advantage which elicits corrective feedback from a tutor, thus reducing the search space of possible action interpretations tremendously. In accordance with findings from developmental psychology we argue that this holistic way is in fact a teleological representation encoding a goal-directed perception of actions facilitated through communicational frames. This observation leads to a range of consequences which need to be verified and analysed in further research. We have written an article [64] where we discussed two hypotheses how this can be made accessible for action learning in robots: (1) We explored the idea that the teleological approach allows some kind of highly reduced one shot learning enabling the learner to perform a meaningful, although only partially correct action which can then be further refined through compositional approaches. (2) We discussed the possibility to transfer the concept of ”conversational frames” as recurring interaction patterns to the action domain, thus facilitating to understand the meaning of a new action. We conclude that these capabilities need to be combined with more analytical compositional learning methods in order to achieve human-like learning performance.
Imitation Learning and Language
Participants : Thomas Cederborg, Pierre-Yves Oudeyer.
We have studied how context-dependant imitation learning of new skills and language learning could be seen as special cases of the same mechanism. We argue that imitation learning of context-dependent skills implies complex inferences to solve what we call the ”motor Gavagai problem”, which can be viewed as a generalization of the so-called ”language Gavagai problem”. In a full symbolic framework where percepts and actions are continuous, this allows us to articulate that language may be acquired out of generic sensorimotor imitation learning mechanisms primarily dedicated at solving this motor Gavagai problem. Through the use of a computational model, we illustrate how non-linguistic and linguistic skills can be learnt concurrently, seamlessly, and without the need for symbols. We also show that there is no need to actually represent the distinction between linguistic and non-linguistic tasks, which rather appears to be in the eye of the observer of the system. This computational model leverages advanced statistical methods for imitation learning, where closed-loop motor policies are learnt from human demonstrations of behaviours that are dynamical responses to a multimodal context. A novelty here is that the multimodal context, which defines what motor policy to achieve, includes, in addition to physical objects, a human interactant which can produce acoustic waves (speech) or hand gestures (sign language). A book chapter was written and published [66] and a journal article was submitted.
COSMO (“Communicating about Objects using Sensory-Motor Operations”): a Bayesian modeling framework for studying speech communication and the emergence of phonological systems
Participants : Clément Moulin-Frier, Jean-Luc Schwartz, Julien Diard, Pierre Bessière.
This work began with the PhD thesis of Clement Moulin-Frier at GIPSA-Lab, Grenoble, France, supervised by Jean-Luc Schwartz (GIPSA-Lab, CNRS), Julien Diard (LPNC, CNRS) and Pierre Bessière (College de France, CNRS). A few papers were finalized during his post-doc at FLOWERS in 2012. Firstly, an international journal paper based on the PhD thesis work of Raphael Laurent (GIPSA-Lab), extending Moulin-Frier's model, was published [25] , and a commentary in Behavioral and Brain Sciences was accepted but not yet published [68] . Both these papers provide computational arguments based on a sensory-motor cognitive model to feed the age-old debate of motor vs. auditory theories of speech perception. Secondly, in another journal paper under the submission process, we attempt to derive some properties of phonological systems (the sound systems of human languages) from the mere properties of speech communication. We introduce a model of the cognitive architecture of a communicating agent, called COSMO (for “Communicating about Objects using Sensory-Motor Operations”) that allows expressing in a probabilistic way the main theoretical trends found in the speech production and perception literature. This allows a computational comparison of these theoretical trends, helping to identify the conditions that favor the emergence of linguistic codes. We present realistic simulations of phonological system emergence showing that COSMO is able to predict the main regularities in vowel, stop consonant and syllable systems in human languages.
Recognizing speech in a novel accent: the Motor Theory of Speech Perception reframed
Participants : Clément Moulin-Frier, Michael Arbib.
Clément Moulin-Frier engaged this work with Michael Arbib during his 6-month visit in 2009 at the USC Brain Project, University of Southern California, Los Angeles, USA. An international journal paper is still under the revision process, in which we offer a novel computational model of foreign-accented speech adaptation, together with a thorough analysis of its implications with respect to the motor theory of speech perception.
Learning Simultaneously New Tasks and Feedback Models in Socially Guided Robot Learning
Participants : Manuel Lopes, Jonathan Grizou, Thomas Cederborg, Pierre-Yves Oudeyer.
We have developed a system that allows a robot to learn simultaneously new tasks and feedback models from ambiguous feedback in the context of robot learning by imitation. We have considered an inverse reinforcement learner that receives feedback from a user with an unknown and noisy protocol. The system needs to estimate simultaneously what the task is, and how the user is providing the feedback. We have further explored the problem of ambiguous protocols by considering that the words used by the teacher have an unknown relation with the action and meaning expected by the robot. This allows the system to start with a set of known symbols and learn the meaning of new ones. We have conducted human-robot interaction experiments where the user teaches a robot new tasks using natural speech with words unknown to the robot. The robot needs to estimate simultaneously what the task is and the associated meaning of words pronounced by the user. We have computational results showing that: a) it is possible to learn the task under unknown and noisy feedback, b) it is possible to reuse the acquired knowledge for learning new tasks and c) even in the presence of a known feedback, the use of extra unknown feedback signals while learning improves learning efficiency and robustness to mistakes. This algorithm has been applied on discrete and continuous problems and tested in a real world experiment using spoken words as feedback signals. A article to be submitted to a journal is currently being written.
Active Learning for Teaching a Robot Grounded Relational Symbols
Participants : Johannes Kulick, Tobias Lang, Marc Toussaint, Manuel Lopes.
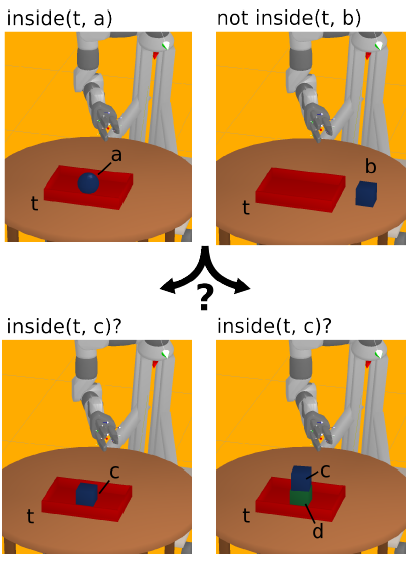
The present work investigates an interactive teaching scenario, where a human aims to teach the robot symbols that abstract geometric (relational) features of objects. There are multiple motivations for this scenario: First, state-of-the-art methods for relational Reinforcement Learning demonstrated that we can successfully learn abstracting and well-generalizing probabilistic relational models and use them for goal-directed object manipulation. However, these methods rely on given grounded action and state symbols and raise the classical question Where do the symbols come from? Second, existing research on learning from human-robot interaction has focused mostly on the motion level (e.g., imitation learning). However, if the goal of teaching is to enable the robot to autonomously solve sequential manipulation tasks in a goal-directed manner, the human should have the possibility to teach the relevant abstractions to describe the task and let the robot eventually leverage powerful relational RL methods (see Figure 29 ). We formalize human-robot teaching of grounded symbols as an Active Learning problem, where the robot actively generates geometric situations that maximize his information gain about the symbol to be learnt. We demonstrate that the learned symbols can be used in a relational RL framework for the robot to learn probabilistic relational rules and use them to solve object manipulation tasks in a goal-directed manner. [44] .
Multimodal Conversational Interaction with a Humanoid Robot
Participants : Adam Csapo, Emer Gilmartin, Jonathan Grizou, JingGuang Han, Raveesh Meena, Dimitra Anastasiou, Kristiina Jokinen, Graham Wilcock.
The paper presents a multimodal conversational interaction system for the Nao humanoid robot. The system was developed at the 8th International Summer Workshop on Multi-modal Interfaces, Metz, 2012. We implemented WikiTalk, an existing spoken dialog system for open-domain conversations, on Nao. This greatly extended the robot's interaction capabilities by enabling Nao to talk about an unlimited range of topics. In addition to speech interaction, we developed a wide range of multimodal interactive behaviours by the robot, including face- tracking, nodding, communicative gesturing, proximity detection and tactile interrupts. We made video recordings of user interactions and used questionnaires to evaluate the system. We further extended the robot's capabilities by linking Nao with Kinect. This work was presented in [34] .