

Section: Scientific Foundations
Software Engineering for Activity Recognition
Participants : Sabine Moisan, Annie Ressouche, Jean-Paul Rigault, François Brémond.
Software Engineering, Generic Components, Knowledge-based Systems, Software Component Platform, Object-oriented Frameworks, Software Reuse, Model-driven Engineering
The aim of this research axis is to build general solutions and tools to develop systems dedicated to activity recognition. For this, we rely on state-of-the art Software Engineering practices to ensure both sound design and easy use, providing genericity, modularity, adaptability, reusability, extensibility, dependability, and maintainability.
This research requires theoretical studies combined with validation based on concrete experiments conducted in Stars. We work on the following three research axes: models (adapted to the activity recognition domain), platform architecture (to cope with deployment constraints and run time adaptation), and system verification (to generate dependable systems). For all these tasks we follow state of the art Software Engineering practices and, if needed, we attempt to set up new ones.
Platform Architecture for Activity Recognition
|
In the former project teams Orion and Pulsar, we have developed two platforms, one (VSIP), a library of real-time video understanding modules and another one, Lama [15] , a software platform enabling to design not only knowledge bases, but also inference engines, and additional tools. lama offers toolkits to build and to adapt all the software elements that compose a knowledge-based system or a cognitive system.
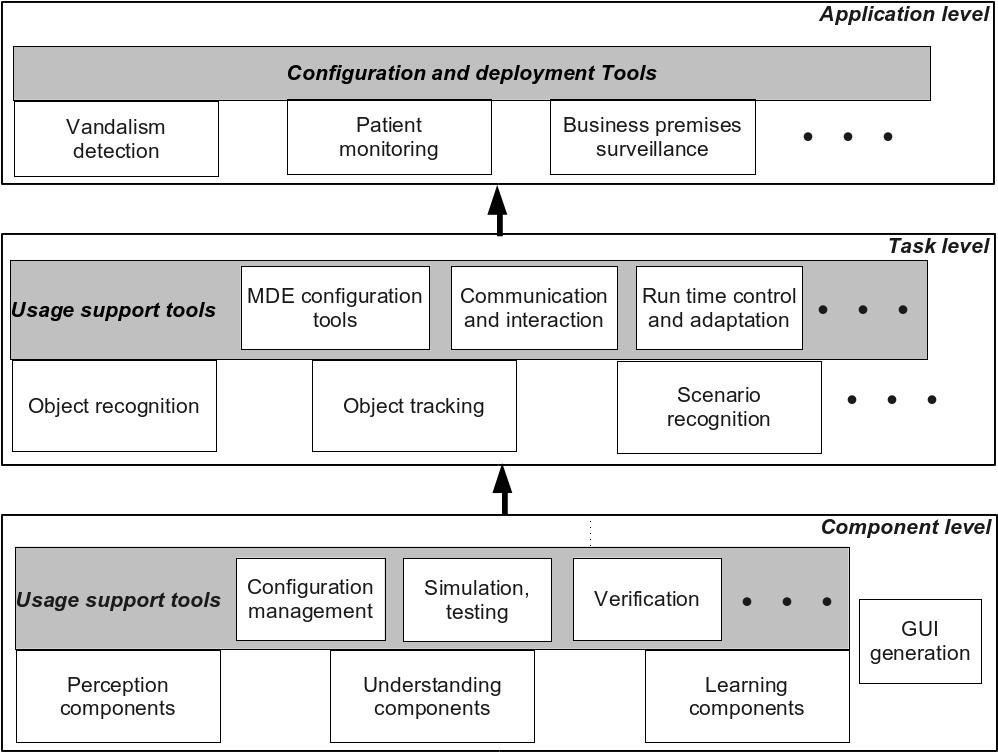
Figure 4 presents our conceptual vision for the architecture of an activity recognition platform. It consists of three levels:
The Component Level, the lowest one, offers software components providing elementary operations and data for perception, understanding, and learning.
Perception components contain algorithms for sensor management, image and signal analysis, image and video processing (segmentation, tracking...), etc.
Understanding components provide the building blocks for Knowledge-based Systems: knowledge representation and management, elements for controlling inference engine strategies, etc.
Learning components implement different learning strategies, such as Support Vector Machines (SVM), Case-based Learning (CBL), clustering, etc.
An Activity Recognition system is likely to pick components from these three packages. Hence, tools must be provided to configure (select, assemble), simulate, verify the resulting component combination. Other support tools may help to generate task or application dedicated languages or graphic interfaces.
The Task Level, the middle one, contains executable realizations of individual tasks that will collaborate in a particular final application. Of course, the code of these tasks is built on top of the components from the previous level. We have already identified several of these important tasks: Object Recognition, Tracking, Scenario Recognition... In the future, other tasks will probably enrich this level.
For these tasks to nicely collaborate, communication and interaction facilities are needed. We shall also add MDE-enhanced tools for configuration and run-time adaptation.
The Application Level integrates several of these tasks to build a system for a particular type of application, e.g., vandalism detection, patient monitoring, aircraft loading/unloading surveillance, etc.. Each system is parametrized to adapt to its local environment (number, type, location of sensors, scene geometry, visual parameters, number of objects of interest...). Thus configuration and deployment facilities are required.
The philosophy of this architecture is to offer at each level a balance between the widest possible genericity and the maximum effective reusability, in particular at the code level.
To cope with real application requirements, we shall also investigate distributed architecture, real time implementation, and user interfaces.
Concerning implementation issues, we shall use when possible existing open standard tools such as NuSMV for model-checking, Eclipse for graphic interfaces or model engineering support, Alloy for constraint representation and SAT solving, etc. Note that, in Figure 4 , some of the boxes can be naturally adapted from SUP existing elements (many perception and understanding components, program supervision, scenario recognition...) whereas others are to be developed, completely or partially (learning components, most support and configuration tools).
Discrete Event Models of Activities
As mentioned in the previous section ( 3.3 ) we have started to specify a formal model of scenario dealing with both absolute time and logical time. Our scenario and time models as well as the platform verification tools rely on a formal basis, namely the synchronous paradigm. To recognize scenarios, we consider activity descriptions as synchronous reactive systems and we apply general modelling methods to express scenario behaviour.
Activity recognition systems usually exhibit many safeness issues. From the software engineering point of view we only consider software security. Our previous work on verification and validation has to be pursued; in particular, we need to test its scalability and to develop associated tools. Model-checking is an appealing technique since it can be automatized and helps to produce a code that has been formally proved. Our verification method follows a compositional approach, a well-known way to cope with scalability problems in model-checking.
Moreover, recognizing real scenarios is not a purely deterministic process. Sensor performance, precision of image analysis, scenario descriptions may induce various kinds of uncertainty. While taking into account this uncertainty, we should still keep our model of time deterministic, modular, and formally verifiable. To formally describe probabilistic timed systems, the most popular approach involves probabilistic extension of timed automata. New model checking techniques can be used as verification means, but relying on model checking techniques is not sufficient. Model checking is a powerful tool to prove decidable properties but introducing uncertainty may lead to infinite state or even undecidable properties. Thus model checking validation has to be completed with non exhaustive methods such as abstract interpretation.
Model-Driven Engineering for Configuration and Control and Control of Video Surveillance systems
Model-driven engineering techniques can support the configuration and dynamic adaptation of video surveillance systems designed with our SUP activity recognition platform. The challenge is to cope with the many—functional as well as nonfunctional—causes of variability both in the video application specification and in the concrete SUP implementation. We have used feature models to define two models: a generic model of video surveillance applications and a model of configuration for SUP components and chains. Both of them express variability factors. Ultimately, we wish to automatically generate a SUP component assembly from an application specification, using models to represent transformations [54] . Our models are enriched with intra- and inter-models constraints. Inter-models constraints specify models to represent transformations. Feature models are appropriate to describe variants; they are simple enough for video surveillance experts to express their requirements. Yet, they are powerful enough to be liable to static analysis [70] . In particular, the constraints can be analysed as a SAT problem.
An additional challenge is to manage the possible run-time changes of implementation due to context variations (e.g., lighting conditions, changes in the reference scene, etc.). Video surveillance systems have to dynamically adapt to a changing environment. The use of models at run-time is a solution. We are defining adaptation rules corresponding to the dependency constraints between specification elements in one model and software variants in the other [51] , [80] , [72] .